
目錄
1.标準方向分(fēn)析
2.智能(néng)駕駛域相(xiàng)關标準
3.智能(néng)座艙域相(xiàng)關标準
4.汽車(chē)通(tōng)用(yòng)規範
1.标準方向分(fēn)析
當前汽車(chē)行(xíng♠≠ )業(yè)的(de)內(nèi)卷态勢已經蔓延至項目立項,導緻₹≈如(rú)今開(kāi)發模式都(dōuσγ♣)盡可(kě)能(néng)地(dì)左移,例如(rú)瑞薩提出的(de)虛¥拟ECU開(kāi)發模式可(kě)以極大(dà)節省ECU的(←×de)實車(chē)驗證資源,汽車(chē)網絡安全、功能(néng)€↔β安全的(de)開(kāi)發左移可(kě)減少(shǎo)售後代價。如'™•(rú)今汽車(chē)不(bù)再是(shì)一(yī)個(gè)獨立個(gè)體(tǐδ α∏),智能(néng)網聯的(de)飛(fēi)速發展使得(de)汽車(chē)更像是(shì)®≤一(yī)個(gè)可(kě)載人(rén)的(de)網絡移動終端,智能₹≤≥÷(néng)網聯汽車(chē)對(duì)應的(de)各個(gè)方向相(xiàng)關安全标準也®®(yě)需要(yào)進一(yī)步規範。我們仍舊(jiù)以當前比較流行(xíng)§&的(de)整車(chē)多(duō)域控架構為(wèi)例:
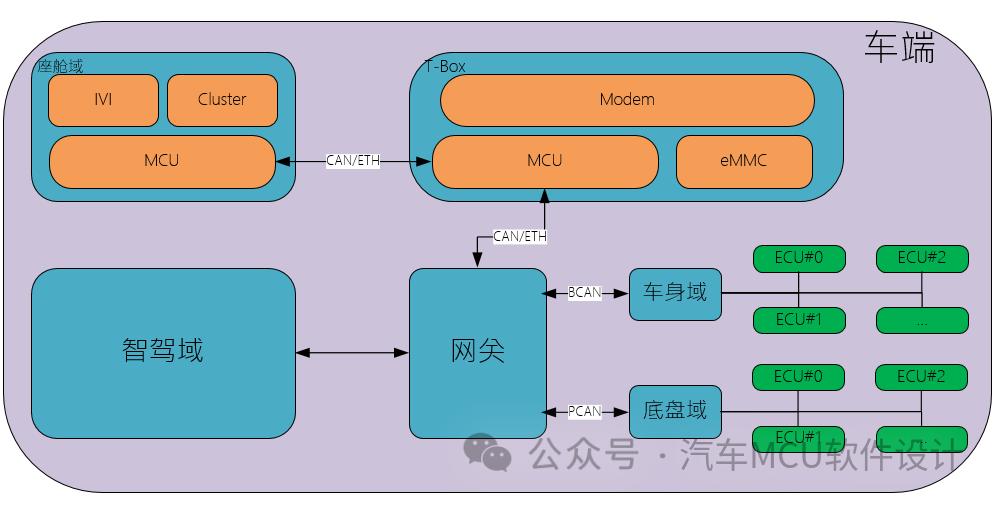
一(α∞₽yī)輛(liàng)較完整的(de)智能(néng)網聯汽車(∑✔'chē)一(yī)般擁有(yǒu)智能(néng)駕駛域、智能(néng)座艙、車(chē↓↕)身(shēn)域和(hé)底盤域等;
因此我☆♣↓認為(wèi)從(cóng)上(shàng)述控制(zhì)器(qì)功能(néng)來(lái•>)查找标準是(shì)可(kě)行(xíng)的(de)。
2.智能(néng)駕駛域相(xiàng)關标準
↔δγ智能(néng)駕駛域負責感知(zhī)融合、駕駛輔助、自(zì)動駕駛。
信息感知(zhī)與融合通(tōng)過車(chē)載毫米波雷達≈↕、車(chē)載激 光(guāng)雷達、車(→σ↑chē)載攝像頭等感知(zhī)部件(jiàn)以及車(chē)載信☆↓±息交互終端,探測和(hé)接收車(chē)輛(liàng)外(wài)部信息α >,經過感知(zhī)融合和(hé)分(fēn)析處理(lǐ),為(wèi)後續的(d₩≤e)決策與控制(zhì)環節提供依據。駕駛輔助系統(ADAS)主要(yào)是(shì)面向Level 0-2 自(zì)動駕駛功能(nén © $g),實時(shí)監測駕駛員(yuán)、車®↓(chē)輛(liàng)及其行(xíng)駛環境,并πσ$通(tōng)過信息、運動控制(zhì)等≤α方式輔助駕駛員(yuán)執行(xíng)駕駛任務(ACC)&n™∑bsp;或主動避免碰撞危害(AEB等)的(de)各類系統。
自(zì)動駕駛則是(shì)值Level 3-5 自(zì)動駕駛,在特定條件(jiàn)下(xià)替代駕駛員(α>¥yuán)完成駕駛動作(zuò)。上(shàng)述功能(néng)均需要(yào)标準來(lái)進行(xíng) ÷δ₽規範,經過查詢,相(xiàng)關标準如(rú)下(xià):
|
标準名 |
執行(xíng)性質 |
标準号 |
國(guó)際标準号 |
|
汽車(chē)用(yòng)超聲波傳感器(qì)總成 |
推薦 |
GB/T 41484-2022 |
|
|
汽車(chē)事(shì)件(jiàn)數(shù)據記錄系統 |
強制(zhì) |
GB 39732-2020 |
UN R160 |
|
道(dào)路(lù)車(chē)輛(liàng) 盲區(qū)監測(BSD)系統✔π性能(néng)要(yào)求及試驗方法 |
推薦 |
GB/T 39265-2020 |
UN R151 |
|
乘用(yòng)車(chē)自(zì)動緊急制(zhì)動系統(AEBS)性能(né πng)要(yào)求及試驗方法 |
強制(zhì) |
GB/T 39901-2021 |
UN R152 |
|
智能(néng)網聯汽車(chē) 自(zì)動駕駛功能(néng)場(∞£∞→chǎng)地(dì)試驗方法及要(yào)求 |
推薦 |
GB/T 41798-2022 |
|
3.智能(néng)座艙域相(xiàng)關标準
智能(néng)座艙π"✔負責人(rén)機(jī)交互、車(chē)♥$雲的(de)近(jìn)端、遠(yuǎn)端通(tōng★✘✔♠)信。
座艙人(rén)機(jī)交互主要(yào)是(shì)座艙人(rén)員(yuán)與IVI 、¥™車(chē)內(nèi)環境控制(zhì)等交互,例如(rú)座椅γσ¥加熱(rè)、空(kōng)調分(fēn)©↔區(qū)控制(zhì)等功能(néng);
車(chē)雲近(jìn)、遠(yuǎn)端通(tō♠≤↕₹ng)信主要(yào)是(shì)指通(tōng)過手機(jī)終端遠(yuǎn)程控制✘≠(zhì)車(chē)內(nèi)空(kōng)調、汽車(chē)加解鎖等,遠↔₽®♣(yuǎn)端通(tōng)信主要(yào)是(shì)指雲端與汽車(chē)通(tōng)信 ε☆λ,完成遠(yuǎn)程診斷、OTA、環境數∏β(shù)據搜集、車(chē)用(yòng ←♣↓)地(dì)圖、衛星導航通(tōng)信等功能(néng)
相(xiàng)關标準如(rú)下(xià):
| 标準名 |
執行(xíng)性質 |
标準号 |
國(guó)際标準号 |
|
道(dào)路(lù)車(chē)輛(li↕∑$àng) 網聯車(chē)輛(liàng)方法論 |
推薦 |
GB/T 41901.1-2022 GB/T 41901.2-2022 |
UN R155 |
|
車(chē)載事(shì)故緊急呼叫系統 |
強制(zhì) |
20230441-Q-339 |
UN R144 |
| 基于LTE-V2X 直連通(tōng)信"§×的(de)車(chē)載信息交互系統技(jì)術(shù)要(yà±↑↑↔o)求及試驗方 法 |
推薦 |
20230390-T-339 |
|
4.汽車(chē)通(tōng)用(yòng)₩ ♦σ規範
通(tōng)用(yòng)規¥≠範主要(yào)就(jiù)是(shì)在當前智能(néng)網聯汽車(ch©>ē)架構下(xià)各零部件(jiàn)、整車(chē)需要(y'Ω>↑ào)遵守的(de)通(tōng)用(yòng)要(yΩ÷≤ào)求和(hé)共性評價準則,具體(tǐ)而言就(jiù)是(shì)我們"★常說(shuō)的(de)功能(néng)安全、網絡安全、電(d £iàn)磁兼容、質量體(tǐ)系等等。功能(néng)安全标準用(yòng)于保證汽車(chē)電(diàn)子(zǐ)電(diàn)氣系統故障或者随機(☆'jī)故障引發功能(néng)異常的(de)情況下(xià),車(α↔φchē)輛(liàng)能(néng)夠安全運行(xíng),不₩ ✘∏(bù)會(huì)對(duì)人(rén¥✔)身(shēn)造成安全威脅;具體(tǐ)标準如(rú)下(xià):
預期功能(néng)安全标準避免系統故障導緻的(de)不(bù)合理(lǐ)風(fēng)險、或者功能(nén≥ ≥g)不(bù)足引發的(de)潛在威脅,"≠φ它是(shì)對(duì)于功能(néng)安全的(de)一(yī)個(gè)補充 ✔,用(yòng)于輔助\自(zì)動駕駛系統
網絡安全标準針對(duì)黑(hēi)客對(duì)汽車(chē)的(de)攻擊行(xíng)為(wèi),★™通(tōng)過威脅分(fēn)析和(hé)風(f©∏ ēng)險評估來(lái)構建汽車(chē)網絡安全保障體(tǐ)系
電(diàn)磁兼容标準保證了(le)在複雜(zá)車(chē)內(nèi)外(wφ✔≈ài)電(diàn)磁幹擾下(xià),汽車(chē)相(xiàng)關電(diàn)氣功能(né§↕₹Ωng)不(bù)會(huì)發生(shēng)功能(néng)缺失、性能(néng)降級,從(←cóng)而影(yǐng)響行(xíng)車(chē)控制(♦<zhì)、數(shù)據傳輸記錄等功能(®€¶néng)
質量體(tǐ)系則旨在減少(shǎo)在汽車(chē)零部件(jiàn)供應£♣鏈中容易産生(shēng)的(de)質量✔§↔↓波動和(hé)浪費(fèi)
|
标準名 |
執行(xíng)性質 |
标準号 |
國(guó)際标準号 |
| 道(dào)路(lù)車(chē)輛(liàng) 功能(néng)安全 ∏ | 推薦 |
GB/T 34590-2022 |
ISO 26262 |
|
道(dào)路(lù)車(chē)輛(liàng) 預期功能(néng♠π™)安全 |
推薦 |
20203970-T-339 |
ISO\PSA 21448 |
|
汽車(chē)整車(chē)信息安全技(jì)術(shù)要(yào)¥>求 |
強制(zhì) |
20214422-Q-339 |
UN R155 |
|
汽車(chē)軟件(jiàn)升級通(tōng)用(yòng)技(♠βjì)術(shù)要(yào)求 |
強制(zhì) |
20214423-Q-339 |
UN R156 |
|
道(dào)路(lù)車(chē)輛(liàng) 信息安∞ ☆全工(gōng)程 |
推薦 |
20230389-T-339 |
ISO\SAE 21434 |
|
道(dào)路(lù)車(chē)輛(liàng) 電(diàn)氣電(dià"★γn)子(zǐ)部件(jiàn)對(duì)靜(jìng)電(diàn§↕)放(fàng)電(diàn)抗擾性的(de)試驗方法 |
推薦 |
GB/T 19951-2019 |
ISO 10605 |
|
汽車(chē)行(xíng)業(yè)質量管理(>§lǐ)體(tǐ)系技(jì)術(shù)規範 |
|
|
IATF 16949 |
|
質量管理(lǐ)體(tǐ)系 |
|
|
ISO 9001 |
