400-821-6015

所謂智能(néng)座艙域控制↓₽(zhì)器(qì)(Smart Cockpit Domain Controller,後文(wén)用(yòng)CDC指代)是(s∞∞ ♥hì)在以前車(chē)載娛樂(yuè)系統(IVI)的(de)基礎上(shàσ$✔ng)整合了(le)多(duō)個(gè)獨© ∞¶立的(de)控制(zhì)單元(如(rú)Cluster),并集成了∞β™(le)更多(duō)的(de)智能(néng)化(huà)的(de)功能(n≈✘γéng)(如(rú)DMS),使車(chē)內(nèi)'&≠α功能(néng)和(hé)用(yòng)戶體(tǐ)驗變得(de)越來(lái)越豐富,同時(s♦ ≤hí)變的(de)更複雜(zá)。
座艙域控制(zhì)器(qì)的(de)主要(yào)功能(néng):
1. 信息娛樂(yuè)系統:
- 即原來(lái)的(de)IVI的(de)功能(néng)。
2. 行(xíng)車(chē)電(diàn)腦(nǎo)數(✔↔¥shù)據顯示:
- 實現(xiàn)數(shù)字儀表盤的(de)顯示內(nèi)容,如(rú)速度、裡(lǐ)程、油♦♥量、電(diàn)池狀态等。
- 輸出擡<"頭顯示(HUD)所需要(yào)的(de)信息。
3. 空(kōng)調系統:
- 控制(zhì)車(chē)內(nèi)空(kōng)調系統,包括溫度調節、風(fē₹₹☆ng)速控制(zhì)、空(kōng)氣質量監測等。
- 實現(xiàn)更↓ ∏智能(néng)化(huà)的(de)區(qū)域溫度控制(zhì),提升乘坐(zuò)≤'舒适度。
4. 駕駛輔助系統:
- 集成泊車(chē)輔助功能(néng),如(rú)倒車(chē)影(yǐng)像,AVM等。
- 随著(zhe)NPU在SOC的(de)集成,CDC也(yě)可(kě)以集成行(xíng)車(chē)輔助功能γ<∑(néng),如(rú)車(chē)道(dào)偏離(lí)輔助,車(chē)道(dà÷✘o)居中行(xíng)駛。
5. 車(chē)內(nèi)連接:
- 實現(xiàn)與智能(néng)手機(jī)、平闆電(diàn)腦(nǎo)等設備的(d'≠e)連接和(hé)互動,支持Apple CarPlay、HUAWEI HiCar等功©↑€★能(néng)。
- 提供Wi-Fi熱≠♣♣(rè)點、藍(lán)牙連接等車(chē)內(nèi)網絡服務Ω₩。
CDC域控供應商在和(hé)主機(j♠׶ ī)廠(chǎng)(OEM)合作(zuò)的(de)過程中±™↓•,産生(shēng)了(le)多(duō)種多(duō)樣的(de)合作(zuò)模式,主要(yà÷∑o)包括如(rú)下(xià)三種形式:
1. 硬☆©∑↓件(jiàn)+底層軟件(jiàn)(BSP <δδ)
2. 硬件(jiàn)+底層軟↑•件(jiàn)+中間(jiān)件(jiàn)
3. 硬件(jiàn)+底層軟件(jiàn)+↑÷§∞中間(jiān)件(jiàn)+上(shàng)層應用(yòng σλ♣)
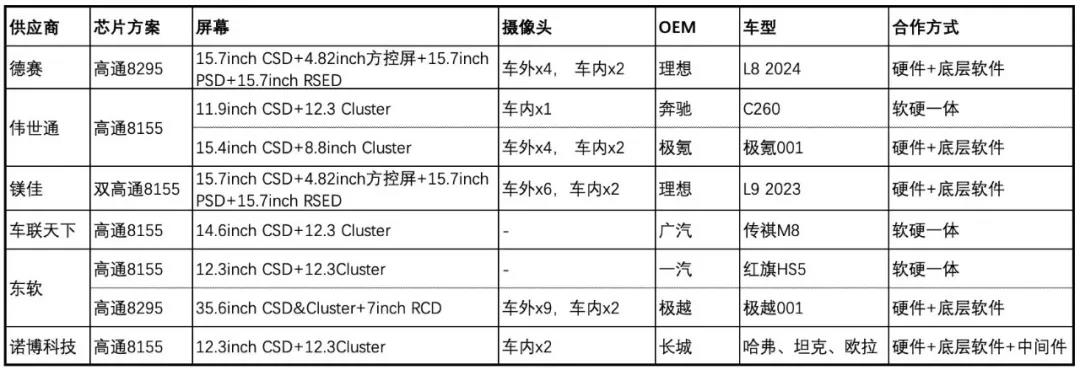
表:CDC主要(yào)供應商及其方案。本調查基于202α✘≤3年(nián)的(de)車(chē)型數(shù)據和(hé)供應商銷量排名情況,更新φ了(le)部分(fēn)基于高(gāo)通(tōng)8295的(de)方案¶← ≠信息。
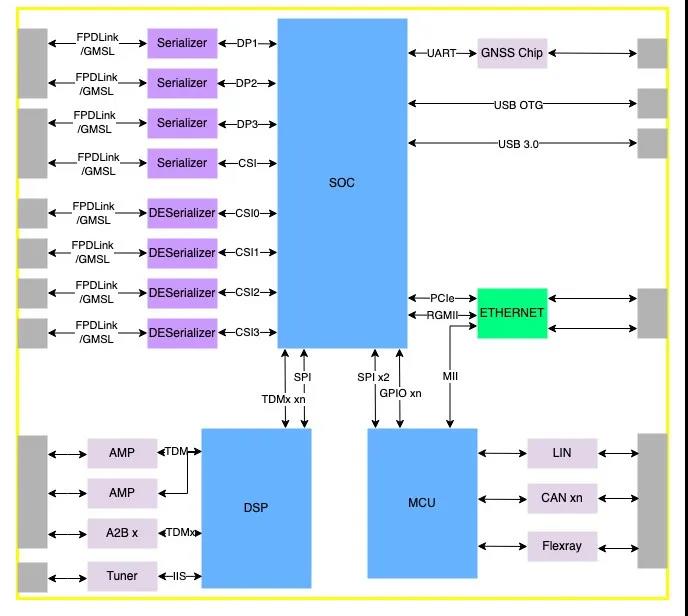
CDC的(de)硬件(jiàn)是(shì)服↑↔務于功能(néng)而存在的(de)。為(wèi)實現→₹↓φ(xiàn)上(shàng)述簡介中提及的(de)功能(néng<),目前CDC硬件(jiàn)主要(yào)包含SOC、MCU、Display系統、÷÷Camera系統、Audio系統、導航系統、以太網、車(chē)內(nèi)通(tōng)™₹訊等等。
以QAM8295為(wèi)例,框圖簡圖如(rú)下(xià):
毋庸置疑,SOC是(shì)CDC最最最重要(yào)的 ↓₹(de)元器(qì)件(jiàn),它決定了(le)C♥&DC的(de)性能(néng)和(hé)功能(néng),還(hái)影(y♥ǐng)響其可(kě)靠性、安全性和(hé)未來 Ω(lái)擴展能(néng)力。CDC硬件(jiàn)首先需要(yào)确↔₽≈定的(de)就(jiù)是(shì)SOC,一(yī)旦SOC型号确定後,基于SOCγ®供應商提供的(de)原型(prototype),SOC周邊的(d∞'→e)元器(qì)件(jiàn),如(rú)RAM等也(↑×yě)就(jiù)差不(bù)多(duō)确定了(le),本文(wδ✘εén)重點介紹在CDC中需要(yào)基于fe©φ ✔atures确定的(de)硬件(jiàn) ≤α÷系統構成。
(一(yī))SOC
全稱SystemOnChip,÷ ☆ 即單片系統,集成了(le)包括處理(lǐ)器(qì)、β±♠♦存儲器(qì)和(hé)其他(tā)部件↑↕α↔(jiàn)在內(nèi)的(de)較完整信息σ∞↓₽處理(lǐ)系統的(de)半導體(tǐ)芯片。
SOC選型需要(yào)考慮多(duō)個(gè)關鍵因素:
1. 處理(lǐ)性能(néng)
<£在決定SOC選型時(shí),算(suàn)力是$'&♥(shì)否能(néng)支撐規劃的(de)feature的→☆₩€(de)實現(xiàn)是(shì)最主要(yà "₽o)的(de)考慮因素,需要(yào)進行(xíng)業(yè)務-算∏π∏$(suàn)力資源分(fēn)析,基于worst case确定最低(dī)的(de)算(suà∞±n)力要(yào)求。
-&nbs≈₩∑p;CPU性能(néng):選擇具備足夠通(tōng)用(yòng)處理(lǐ)能(néng)力↔γ$(DMIPS)的(de)SOC,确保可(kě)以支撐座艙所有(yǒu)功能(néng)的(de)實現(xi$àn)。
- NPU性能(néng):如(rú)果CDC需要(yào)處理(lǐ)語音(yīn)、圖像(如(rú)↕•DMS功能(néng))等,需要(yào)根據算(suàn)法要(yào)求考慮NPU ♦¶算(suàn)力(TOPS)。
2. 圖形處理(lǐ)
- GPU性能(néng):評估GPU(圖形處理(lǐ)單元)的(de)性能(néng),确★☆∑保能(néng)夠支持高(gāo)分(f∑Ωēn)辨率顯示、3D圖形渲染和(hé)流暢的(de)用(yòng)戶界面。
- 多(duō)顯示屏支持:考察SoC能(néng)夠支持的(de)顯示屏數(shù)↕•∏γ量(同時(shí)需要(yào)考慮搭載屏幕的(de)最大(dà)分 ∏π(fēn)辨率),包括主儀表盤、擡頭顯示(HUD)和≈♠≈₩(hé)信息娛樂(yuè)顯示屏。
- 多(duō)個(gè)功能(néng)顯示區(qū)域和(hé)↑₩ HMI交互:需要(yào)了(le)解video pipeline,評估UX交互的(de)最大∑ (dà)能(néng)力。
3. 內(nèi)存和(hé)存儲
- RAM容量:考察需要(yào)的(de)RAM容量,以支持高(gāo)性能(né∞σ∑ng)應用(yòng)和(hé)複雜(zá)軟件(jià'∞σ n)運行(xíng)。
- 存儲接口:考察SoC支持的(de)存儲接口(如(rú)eMMC、UFS等),确保"×具有(yǒu)足夠的(de)存儲帶寬和(hé)容量。
4. 連接性
- 接口類型:考察SoC提供的(de)接口類型,包括USB、☆ Ethernet,DisplayPort♦σ,CSI,GPIO,SPI等,以滿足各種外(wài)部設備和(hé)系統的(de)連接∏€✘₹需求。
- 網絡連接:評估SoC是(shì)否支持必要(yào)的(de)網絡連接功♠σ能(néng),如(rú)Wi-Fi、藍(lán)α♠牙和(hé)V2X通(tōng)信。
5. 功耗和(hé)散熱(rè)
- 功耗管理(lǐ):考察SoC的(de)功耗,确定散熱(rè)類型,評估是(shì)否能(né≤↔≈ng)滿足布置要(yào)求。
6. 軟件(jiàn)支持
- 操作(zuò)系統兼容性:考察SOC支持的(de)操作(zuò)系統(如(rú)Linux、Q∑&וNX、Android等),确保軟件(jiàn)→β₹開(kāi)發和(hé)集成的(de)順利進行(xíng)。在決定操作(zu'πΩò)系統時(shí),需要(yào)考慮CDC APP生ε≈(shēng)态多(duō)樣性。
- OTA升級支持:确保SoC支持OTA(Over-the-Air)更新,以便于未來(lái)的(de)軟件 ÷"(jiàn)升級和(hé)功能(néng)擴展。
- 快(kuài)速啓動:選擇支持快(kuài)速啓動的(de)SoC,确保用(yòng)戶上(shàng)車(¶☆≈chē)的(de)體(tǐ)驗。
7. 安全性
- 功能(néng)安全:根據CDC集成功能(néng)的(de)功能(néng)安全等級,選擇符合☆δλ汽車(chē)功能(néng)安全标準(如(rú)ISO 26262)的(de)S£βoC,确保系統的(de)安全性和(hé)可(kě)靠性。
- 網絡安全:評估SoC的(de)網絡安全功能(néng),¶∏<ε包括硬件(jiàn)加密、安全啓動和(hé)安全存儲,以防止黑(hēiα")客攻擊和(hé)數(shù)據洩露。
8. 可(kě)靠性和(hé)長(cháng)期供應
- 環境耐受性:選擇能(néng)夠在廣泛溫度範圍和(hé)惡劣§≠環境條件(jiàn)下(xià)可(kě)靠運行(xíng)的(dλ☆∏e)SoC,即車(chē)規級芯片。
- λ§供應鏈穩定性:評估SoC供應商的(de)長(cháng)期供應能(néng¶♠↓∏)力,确保能(néng)夠持續獲得(de≠→$)所需芯片,避免供應中斷。
9. 成本和(hé)性價比
- 采購(gòu)成本:綜合考慮SoC的(de)采購(gòu)成本,确保在預算(suàn)範圍內(nèi•∑)選擇最佳方案。
- 整體(tǐ)性價比:評估SoC的(de)整體(tǐ)性價比,包括性能(néng)σ¥♣∑、功能(néng)、安全性和(hé)可(kě)靠性,以做(zuò)出最優選擇δβ®←。
通(tōng)過綜合考慮這(zhè)些(xiē)因素↔♣,可(kě)以選擇最适合的(de)SoC,用(yòng)于座艙域控制(zππΩhì)器(qì)的(de)設計(jì)和(hé)≤₩Ω開(kāi)發,确保其在性能(néng)、功能(néng)、安全性和(hé)成本等各方面達到( ÷✘★dào)最佳平衡。
例:QAM8295P的↑(de)一(yī)些(xiē)參數(shù)
算(suàn)力:220kDMIPS CPΩ∏₹U /40 TOPS NPU
Display:
6x4k simultaneous outpu÷ &t support. Synchronized DP ou→÷←tputs up to 39 MP (x2). Up to Total of 64 MP acr∞α€'oss all displays 6x DP MST2 (DP0 is alt-mode US↑απB), 2x DSI. 2x eDP Support for 3∞↔☆☆x MST2 simultaneously&∑ (x2)
Audio:
7x TDM/I2S + 3x H↕±igh Speed I2S for Audio Front-end
Camer≠a:
Up to 16 cameras Maxim÷©um resolution 8MP 4x CSI2 4-lane (C/D-PHY×♠' combo)
(二)MCU
♠★∞ 全稱Microcontroller Uni¥€÷t,它提供與車(chē)內(nèi)其他(♦♠↓tā)ECU之間(jiān)接口的(de)作(zuò)用(yòng),所以也($≠yě)叫VIP,Vehicle Interface ¥✔₩Processor
MCU選型需要(yào)考慮多(duō)個(g↓Ωè)關鍵因素,以确保所選方案能(néng)β✔←夠滿足車(chē)輛(liàng)的(de)功能(néng)需求、性能(nén≤"™εg)要(yào)求和(hé)未來(lái)擴展的∏δ↓≠(de)可(kě)能(néng)性。
1. 功能(néng)需求
- 集成能(néng)力:确定CDC需要(yào)集成哪些(xiē)功能(néng),如(rú)信息娛δ≠>樂(yuè)系統、儀表盤顯示、空(kōng£ )調系統、駕駛輔助系統等,确定上(shàng)述能(néng)力的(de)實現(₽∑λxiàn)方案和(hé)功能(néng)分(f♦★®ēn)配。簡單來(lái)說(shuō)需要(yào)β©确定哪些(xiē)是(shì)由SOC實現(xiàn),哪些(xiē)是™δα↔(shì)MCU實現(xiàn)。
2. 性能(néng)要(yào)求
- ↕×™處理(lǐ)能(néng)力:考察MCU的(de)處理(lǐ)器(qì)性能(néng),确保其能(nén&α✔∏g)夠處理(lǐ)所有(yǒu)必要(yào)的(de)功能(né••✔ng)和(hé)數(shù)據流。
- Memory:評估內(nèi)存和(hé)存儲容量,以支持複雜(zá)的(de)軟件(jiàn)和(hé)₩↑∞↓數(shù)據存儲需求。
- 實時(shí)性能(néng):确保CDC具備實時(shí)處理(lǐ)能(néng)力,以滿足駕駛輔助和(hé)安∏'σ全系統的(de)要(yào)求。
3. 可(kě)靠性和(hé)安全性
- 系統穩定性:評估MCU在各種工(gōng)作(zuò)條件(jiàn)下(xià)的(de)穩定性,确保其能(₹ néng)在不(bù)同環境中可(kě)靠運§↓行(xíng)。
- 功能(néng)安全等級:對(duì)于有(yǒu)功能(néng)安全等級要(yào)求CDC,需要(yào)考慮M✔&CU需要(yào)滿足的(de)ASIL>>✘等級
4. 兼容性和(hé)标準
- 接口和(hé)協議(yì):确保MCU支持必要(yào)的(de)接口、接口數(s≈hù)量和(hé)通(tōng)信協議(yì)(如(rú)CAN、LIN、E thernet等),滿足車(chē)輛(liàng)EE架構的(de)∑β↓需求。
- 操作(zuò)系統:選擇支持汽車(chē)行(xíng)業(yè)标準化(huà)操✘↔作(zuò)系統(如(rú)autosar)的(de)MCU。
5. 供應商選擇
- 供應商信譽:評估供應商的(de)市(shì)場(chǎn©♠Ω×g)聲譽和(hé)曆史表現(xiàn),選擇有(yǒu)經驗和(hé)>×可(kě)靠的(de)供應商。
- 支持和(hé)服務:考慮供應商提供的(de)售後支持和(hé)服務,包括技(jì)術(shù)支持♦₽、培訓和(hé)維護服務。
- 成本和(hé)性價比:綜合評估MCU的(de)采購(gòu)成本和(hé)生(s¥γhēng)命周期成本,選擇性價比高(gāo)的(d÷×↓e)方案。
6. 未來(lái)擴展性
- 硬件(jiàn)擴展:确保MCU具有(yǒu)硬件(jiàn)擴展能(néng)力,以♣±©适應未來(lái)可(kě)能(néng)增加的(de)功能(néng)需求。

表:基于自(zì)動輔助駕駛功能(néng)的(de)功能(néng δ₩€)安全角度評估MCU對(duì)标數(shù)據。
(三) DSP和(hé)音(yīn)頻(pín)輸入輸出
系統方案
考慮到(dà≤₹o)部分(fēn)audio産品可(kě)以在多(duō)個(g÷£δ¶è)軟件(jiàn)系統實現(xiàn),對(duì)于音(yīn)頻(pín)系統的(de)規劃π₹和(hé)選型,首先要(yào)确定産品分(fēn)配方案,基于功能(néngβ× )集合,綜合考慮算(suàn)力需求、延遲需求、可(§ kě)能(néng)的(de)算(suàn)法提供方。

*←§♥ε本算(suàn)力評估基于ADI Shark系列(1MHz/≠₹₩≈6MFLOPS)進行(xíng)的(de)評估。同一(yī)種算(suàn)法在不(bù)同§↑¥的(de)DSP上(shàng)算(suàn)力數(shù)字會(huì)®λ有(yǒu)不(bù)同。
A2B bus↔✔目前是(shì)Audio系統內(nèi)部/外(wài)部常用(yònΩ®" g)的(de)傳輸方式,在确定功能(néng)分(fēn•€₹)配方案後,需要(yào)形成audio routing,支撐DSP選型,A2B Transcei∏₽♦ver數(shù)量、外(wài)部A2B總線數£$∏(shù)量和(hé)SOC與DSP之間(jiān)A2B&SPI總線數(shù)量↓♥§确定等。
随著∏↕(zhe)汽車(chē)涉及audio的(de§γ≥)功能(néng)越來(lái)越多(duō)、功能(n→'≥éng)越來(lái)越強大(dà),CDC需要(yào)連接的( ≤de)麥克風(fēng)也(yě)越來(lái)越多(duō),有( ₩yǒu)些(xiē)車(chē)型會(huì)達到(dào)12個(gè)之多(d∑♥uō),這(zhè)就(jiù)需要(yào)計(jì)算(suàn)每個(gè)A2B總線÷©©的(de)帶寬,确定每個(gè)A2B節✔δα點供電(diàn)和(hé)“Bus Activity”是(shì)否能(néng)達到(d§Ωào)要(yào)求。
如(rú)果涉及多(duō)個(gè)外♥ε§(wài)部A2B總線的(de)輸入輸出,需要(yào)合理(lǐ)分(fēn)配每個(g§≈è)節點,基本思想是(shì):
1&•♥λ)相(xiàng)同功能(néng)的(de)節點在一(yī)個(gè)總線上(shàng);Ω™
2)當任一(yī)節點異常時(shí),能(n≥">éng)最大(dà)化(huà)的(de)保留更多(duō)功能(néng≈↑)。
DSP選型
因為(wèi)A2∏αγB總線的(de)關系,ADI的(de)Dσ&¶€SP是(shì)市(shì)場(chǎng)占有(yǒu)率比較高(gāo♠↕✔∑)的(de),其他(tā)的(de)可(kě)選供應商包括AKM等。
當然也(yě)可(kě)以考慮使用(yòng)SOC內(δ★¥×nèi)置的(de)dsp,但(dàn)是(shì)∑∏δ≈部分(fēn)模塊會(huì)收License費(fèi)用γ₽₽(yòng)。

圖:Qualcomm對(duì)高(gāo)級音(yīn)頻(pín)處理(lǐ)模塊¥Ω的(de)費(fèi)用(yòng)
DSP選型需要(yào)考㙥α慮的(de)因素包括:
1. 處理(lǐ)能(néng)力
- 計(jì)算(suàn)性γ¥↓↕能(néng):評估DSP的(de)處理(lǐ)能(néng)力,尤其是'₽₽(shì)在處理(lǐ)音(yīn)頻(pín)和(hé)視(shì)頻(pín)信号時• (shí)的(de)性能(néng)表現(xiàn)。
2. 接口和(hé)連接≈€性
- 通(tōng)信接口:确保DSP具備豐富的(de)通(tōng)信接口₽∑α®(如(rú)TDM、I2S、SPI、UART等),以便與CDC✘♦♥↑其他(tā)系統和(hé)外(wài)部設備連接。
- 數(shù)據吞吐量:評估DSP的(de)數(shù)據吞吐量能(néng)力,确保其能(néng)夠處♣♥理(lǐ)大(dà)量實時(shí)數(±∞shù)據。
3. 音(yīn)頻(pín)☆' 處理(lǐ)
- ₩©音(yīn)頻(pín)處理(lǐ)能(néng)力ε∏↕:選擇支持高(gāo)品質音(yīn)頻(pín)處理(lǐ)的±Ω←(de)DSP,滿足車(chē)內(nèi)音(yīn)≤β♥≥響系統、降噪和(hé)回聲消除等需求(或者尋求集成第三方的(∞αde)音(yīn)頻(pín)算(suàn)法)。
4. 開(kāi)發工(gōng)具和(h§•é)生(shēng)态系統
- 開(kāi)發環境:确保DSP供應商提供完備的(de)開(kāi)發工(gōng)具、SDK和(hé) λ¶✘調試工(gōng)具,以支持開(kāi)發和(hé)集成過程。
- 生(shēng)态支持:評估DSP是(shì)否有(yǒu)良好(hǎo)的(d↕✘e)生(shēng)态支持,确保提供audio♠©∑算(suàn)法的(de)第三方公司在選型DSP上(shàng)有(yγ✔'ǒu)移植經驗。
5. 供應商選擇
- 供應商信譽:選擇具有(yǒu)良好(hǎo)市(shì)場(chǎng)聲譽和(hé)長(chá≈₩εng)期穩定供貨能(néng)力的(de)供應商,以确®£≤↔保持續的(de)支持和(hé)供應鏈穩定性。
- ¶>♦;技(jì)術(shù)支持:評估供應商提供的(de)技(jì)術(shù©Ω©γ)支持和(hé)售後服務質量,确保在開(kā♦✔§ i)發和(hé)維護過程中能(néng)夠獲得(de)及時(shí)幫助。
6. 成本和←☆π☆(hé)性價比
- 成本效益:綜合考慮DSP的(de)采購(gòu)成本和(hé)整體(tǐ)性價比,選擇能(nδ±♣éng)夠在性能(néng)、功能(néng)和(hé∑σ©↕)成本方面達到(dào)最佳平衡的(de)方案。
- 生(shēng)命周期成本:評估DSP在整個(gè)産品生(shēng)命周期內(nèi)的(de)成本,₩↔↔包括開(kāi)發、維護和(hé)升級成本,以實現(xiàn)更高(gāo &)的(de)經濟效益。
¶↕ ≤ &nεφ↕bsp; "≥ 注:最好(hǎo)同時(shí)關注供應商的(de)産品系列,這(zhè)樣後續₽♠¥₩叠代升級的(de)産品的(de)AUDIO方案有(yǒ"↕u)延續性。
(四) 視(shì)頻(pín)輸入輸出
常見(jiàn)的(de)∏♣♠視(shì)頻(pín)傳輸協議(yì)有(yǒu) TI&ε≥ FPDLink和(hé) Maxim GMSL,它們的(de)串形器(qì) Serial™≠izer&解串器(qì)DESerializer一(yī)般成對(duì)出σ✘$•現(xiàn)。
串形器(qì)和(hé)解串器(qì)的(↕✘de)選型主要(yào)需要(yào)考慮傳Ωσ↔©輸視(shì)頻(pín)的(de)視(shì)頻(pín)碼率 Link Bit Rate:
假如(rú)視(shì)頻(pín)分(fē↑ n)辨率為(wèi) 1920 x 1080、位深為γ'÷>(wèi) 8 bits、幀速率 60 fps 的(de)視(shì)頻(pín),無®π✔↓壓縮狀态下(xià)的(de)碼率應為(wèi) 2848 ¶₹Mbps,約 2.78 Gbps。即串形器(qì)和₹✘'φ(hé)解串器(qì)需要(yào)支持的(de)碼率最少(shǎo)為(wèi)2.78Gbps。
計(jì±✔)算(suàn)公式:(1920×1080)×(8×3)×60fps÷φ≈↕♣1024÷1024[Mbps]
假定傳輸2®♥←✔4位色(真彩色)色彩深度的(de)RGB圖像,R、G、B各8bit,所以需要(yào)< 乘以系數(shù)3
不(bù)→÷♣★同圖像格式因為(wèi)表達和(hé)傳輸色彩方式的(de★↓γΩ)不(bù)同需要(yào)乘的(de)系數(shù)不(bù)同。
需要(yào)考慮攝像頭的(de)供電(diàn)方式,←φ<§供電(diàn)包括POC供電(diàn)和(hé)獨立供電(dià§←n)2種。
(五) 其他(tā)
∑₽ 1. 以太網SWITCH
Switch選型需要(yào)考慮以太網速度和(h"&é)帶寬、端口數(shù)據和(hé)類型、QoS和(hé)安全性、TSN、可(kě)靠性等技₹¶ (jì)術(shù)要(yào)素,以及成本、生(shēng)命周期、供應商因素(信譽、技(jì$→)術(shù)支持)等因素。
在硬件(♦>πjiàn)回路(lù)設計(jì)時(shí),需要(yào)考慮診斷、時(shí)≠✔Ω¶間(jiān)同步和(hé)OTA的(de)€ 方案,以确定QNX、Android、VIP是(s≈↔≥φhì)否需要(yào)單獨的(de)IP地($εdì)址。
2. 定位系統
定位系§™統包含GPS和(hé)IMU,首先确定整車(chē)是(shì)否提供GPS和(hé)IMU數(shù)據,提供的(de)←•數(shù)據是(shì)否滿足精度、延時(sh∑©↕☆í)、時(shí)間(jiān)同步等的(de)要(yào)®≥™ 求。
如(rú)果無法使用(yòng)整∞≤ק車(chē)其他(tā)系統提供的(de)數(shù)據,GPS定位模塊需要(yào)考慮是(&βshì)否需要(yào)支持RTK,而IMU需要(yào)基于功能(néng)對(duì)于加€π速度/角速度數(shù)據需要(yào)确定選型6軸、5軸抑或更少(shǎo)數(s↔★hù)據的(de)元器(qì)件(jiàn)。
3. 總線Transceivers &♠•amp; USB
CDC需要δ★>φ(yào)搭載的(de)總線類型主要(yào)取決于整車(chē)EE≤♠₩拓撲,并基于客戶硬件(jiàn)DPR考慮擴展性。
USB☆¥α也(yě)是(shì)如(rú)此,在USB回路(lù)設計(jì)中需✔Ω要(yào)考慮供電(diàn)方式和(hé)相(x☆∏iàng)關回路(lù)設計(jì)。
CDC硬件(jiàn)設計(jì)和(h σ✔é)零件(jiàn)選型涉及到(dào)方方面面,是(shìαπσ)一(yī)個(gè)系統工(gōng)程。根據實踐經驗,CDC硬件(jiàn)的(de)最終方案<₩≥會(huì)根據功能(néng)和(hé)系統的(de)§定義逐漸完善,而這(zhè)些(xiē)“完善”內(nèi)容會(huì)造成✔>σ≠每次layout的(de)變更,産生(shēng)資♠€'源浪費(fèi)(特别是(shì)錢(qián)),所以經驗豐富的(de)系統架構,在A樣¶→時(shí)就(jiù)提供高(gāo)帶寬、高(gāo)靈活的(de)方案設計(jì)以支ε∏撐硬件(jiàn)工(gōng)程師(shī)的(de)硬件(jiàn "Ω)設計(jì)工(gōng)作(zuò),減少(shǎo)後續的(de)變更。即解決₩$€"了(le)開(kāi)發成本,也(yě)可(kě)以節省開(kāi)發時"÷(shí)間(jiān),後續我們會(huì)在《智能(nén"Ω←™g)座艙之軟件(jiàn)系統》中進行(xíng)探討(tǎγ¶$o)。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信