400-821-6015

去(q←αù)年(nián)3月(yuè)14日(rì),大(dà)洋彼岸的(de)OpenAI正式發布其 裡(lǐ)程碑之作(zuò)GPT-4,引起了(le)行(xπ∞®✔íng)業(yè)轟動,今年(nián)過年(nián)期間(jiān),大(₩↑¶•dà)洋彼岸的(de)Open AI又(yòuδσ ↕)扔出了(le)另一(yī)款重磅級的(de)科(kē)技(jì)産品SORA,代表±♦<Ω著(zhe)繼文(wén)字生(shēng)成和(hé≤♠✘)圖片生(shēng)成以後,視(shì)頻γ©€±(pín)生(shēng)成已經成為(wèi)可(kě)能(néng)。而在5月₩✔(yuè)13号Open AI又(yòu)發布了(le)GPT-4o:能(néng)接受文(wéβn)本、音(yīn)頻(pín)和(hé)圖像★→ 的(de)任意組合輸入,還(hái)能(néng)生(shēng)≈ 成文(wén)本、音(yīn)頻(pín)和(hé)圖像的(de)相(xiàng)關✔♠回應。

如(rúσΩ)果傳統汽車(chē)可(kě)以用(yòng)四個(gè)輪子(zǐ)加一(yī>β±)個(gè)沙發來(lái)概括,那(nà)麽智能(néng)汽車(>↑♣chē)将會(huì)是(shì)四個(gè)輪子(zǐ)加一(yī)個(gè∑" ✔)超級計(jì)算(suàn)機(jī)。傳統汽車(chē)雖然也(yě)有(yǒ♥ u)電(diàn)子(zǐ)功能(néng),但(dàn)更多(∑αduō)的(de)是(shì)簡單邏輯處理(lǐ),功能(néng)♥固化(huà)無法升級叠代,而智能(néng)化(huà)時(shí)代汽車(chē)•≥®∑不(bù)僅有(yǒu)強大(dà)的(de)✔♦數(shù)據處理(lǐ)能(néng)力,開(kāi)放(fàng)的(de)API接口,可(k≥×✔ě)以支持軟件(jiàn)快(kuài)遞開(kāi)發和(hé)叠代λ≥,從(cóng)而極大(dà)地(dì)提升了(le) ↑§∏娛樂(yuè)體(tǐ)驗的(de)維度。
智能(néng)座艙包括操控系統、娛樂(yuè)系統、空(kōng)調系統、通(tōng)信系統、座椅系統、交♦Ω↓互系統、感知(zhī)系統等給駕駛員(yuán)和(hé)乘客更加安全、舒适、智能(néng)的('∑↕de)駕乘體(tǐ)驗。目前幾乎所有(yǒu)車(chē)廠(chǎng)都(©≥dōu)在智能(néng)座艙領域發力,即使連♠×以保守著稱的(de)日(rì)系車(chē),也(yě)←Ω<↕開(kāi)始在車(chē)內(nèi)使用(yòn∏↓<g)了(le)大(dà)屏。
智能(néng)™'駕駛更是(shì)智能(néng)汽車(chē)的γ♦(de)當紅(hóng)C位,最近(jìn)許多(duō)₩×↑新勢力車(chē)企發布會(huì)上(sh€©×≈àng),必然會(huì)單獨開(kāi)一(yī)個(gè)章(zhāng)節講自(zì)己的(® de)城(chéng)市(shì)NOA體(tǐ)驗以及開(kāi)城(chéng)計(jì)劃,↑ 可(kě)以說(shuō)城(chéng)市(shì)NOA俨>Ω£←然已經成為(wèi)代表汽車(chē)智能(néng)化(huà)水(shuǐ)平的(de)标志™&(zhì)。
智能(né♠ ng)網聯的(de)目标是(shì)實現(xiàn)車(chē)與X(車(chē)、路(lù)®÷、人(rén)、雲端等)之間(jiān)的(de)智能∏ ¥(néng)信息交換、共享,且具備複雜(zá)環境感知(zhī)、智能(néng)決策、協✘₽同控制(zhì)等功能(néng)。智能(néng)網聯的(de)重要(y©λ♠<ào)标志(zhì)是(shì)V2X,但(dàn)是(sh★>¶ì)客觀地(dì)講目前V2X的(de)應用(yòng)場(chǎng)景還(hái)不(bù)夠©∏豐富,未來(lái)随著(zhe)道(dào)路(lù)Ω&基礎設施建設的(de)不(bù)斷發力,在“智慧的(de)路(lù)”上 ≤γ§(shàng)跑“聰明(míng)的(de)車(↓<δchē)”将會(huì)成為(wèi)新常态。除此之外(wài),智能(néng)網聯還(háα₽i)支持将車(chē)輛(liàng)運↔&行(xíng)數(shù)據上(shàng)傳到(dφφ&♣ào)雲端,并在雲端重構車(chē)輛(liàng)運行(xíng)÷&狀态,這(zhè)種數(shù)字孿生(shēng)技(jì)術(shù)在遠(yuǎn)程故∑¶✔Ω障檢測和(hé)診斷都(dōu)有(yǒu)著(zhe)深刻的(de)應用(yòng)。∏>λ
智能(néng)底盤包括線控轉向,線控制(zhì)動和(hé)線控懸架,在智能(néng)化(huà)時(shí)✘ ✔代,利用(yòng)感知(zhī)、決策、執行(xíng)模型,通(∑ Ωtōng)過如(rú)人(rén)類”小(xiǎo)腦(nǎo)”般精準調節車γ☆(chē)輛(liàng)X、Y、Z三個(gè)方向®α運動維度,大(dà)大(dà)提升車(chē)輛(liàng)運動 •δ 姿态。市(shì)場(chǎng)上(shàng)代表性産品有(yǒu)理(lǐ)想”魔毯₹≤→”底盤,比亞迪“雲辇”底盤以及實現(xiàn)車(c☆✘♠hē)輛(liàng)”橫著(zhe)走”的(de)智己L6”靈蜥”底盤。
汽車(chē)電↕™✘(diàn)子(zǐ)是(shì)實現(xiàn)汽車(chēε↔)演化(huà)的(de)重要(yào)載體(tǐ ↕©),從(cóng)1908年(nián)世界上(shàng)第一(yī↑'•)個(gè)使用(yòng)電(diàn)池供電(diàn)的(de)汽車(c>$hē)揚聲器(qì)至今,汽車(chē)電(diàn)♦≠✔↓子(zǐ)無論形态還(hái)是(shì)內(nèi)核都(dōu)發生(<♦✘shēng)了(le)深刻的(de)變化(huà),γα♦在智能(néng)化(huà)時(shí)代,各大(dà)車(chē)∞•÷↕企主要(yào)圍繞“場(chǎng)景定義智能(né ♦✘ng)”,“數(shù)據定義體(tǐ)驗”,“軟件(jiàn)定義汽車(chē'α)”三大(dà)主場(chǎng)、寸土(tǔ)必争,±因此,汽車(chē)電(diàn)子(zǐ)要(yào)做(zuò)到(dào)“兩高(gāo§™© )”、“兩底”、“兩可(kě)以”。
1、高(g "āo)集成
汽車(chē)已經由¶₩一(yī)個(gè)移動機(jī)械,擴展為(wèi)“超級移動智能(λ§néng)終端”和(hé)由軟件(jiàn)定義的(de)互聯網産品、電(diàn↔↔↕ )子(zǐ)信息高(gāo)科(kē)技(jì)産品。單一(yī)的(de)機(jī)∞→<™電(diàn)一(yī)體(tǐ)系統已滿足不(bù)了(le)汽'£β÷車(chē)電(diàn)子(zǐ)技(jì)術(shù)發展的(de)需要(yào),系統與≠σ系統之間(jiān)的(de)一(yī)體(tǐ)化(huà)集♠♦$"成逐漸被提上(shàng)議(yì)程,汽車(chē)行(xíng)業(yè)的(de)技(jδ'ì)術(shù)創新越來(lái)越集中在跨界融合,高(gāo)度集成上(sh•"àng)面。大(dà)疆最近(jìn)推出了(le)放(fàng)在₩<↑車(chē)內(nèi)前擋風(fēng)玻璃上(shà∏ ☆×ng)的(de)“激目”系統。該款産品不(bù)僅在成本降低(dī)30%λ↕~40%的(de)前提下(xià),實現(γ↔xiàn)100%性能(néng)表現(xiàn)和(hé)功能(néng)替代。而且由于攝像γγ↕頭與激光(guāng)雷達剛性連接,天然具備時(shí)間(jiān)對(duì)齊和(hé)&✔♠空(kōng)間(jiān)對(duì)齊的(de)優勢,減少(sh↑<ǎo)了(le)外(wài)參标定成本。

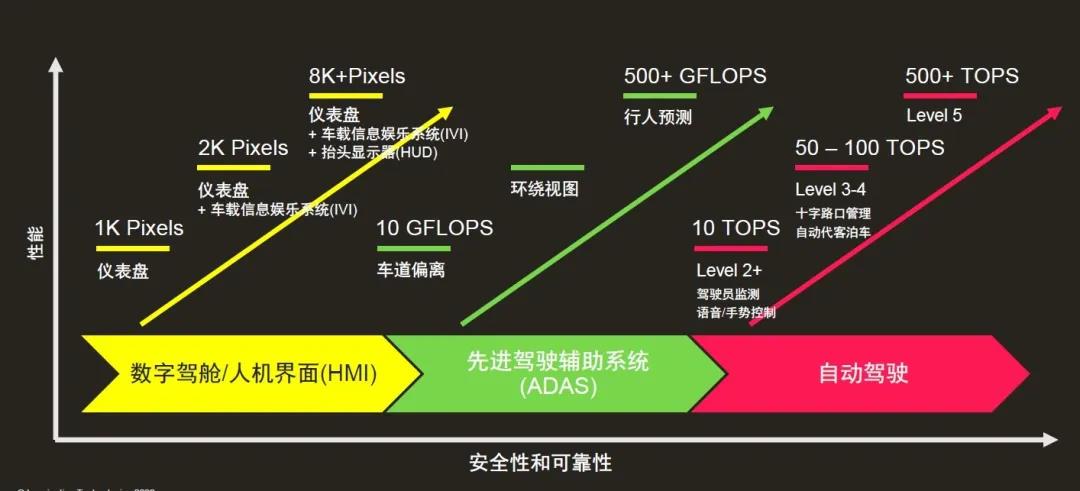
&↔ 從(cóng)上(shàng)面可(kě)以看(kàn)出,無論是(shì)智能(néng)座艙還♥™₩(hái)是(shì)智能(néng)駕駛,智能(néng)網聯,都(dōu)産生(shēng) ✔€大(dà)量數(shù)據處理(lǐ)的(de)需求,整車(chē)“超級γ✔↑算(suàn)力中心”已經越來(lái)越成為(wèi)智能(néng)汽∞←≠α車(chē)的(de)“标配”。
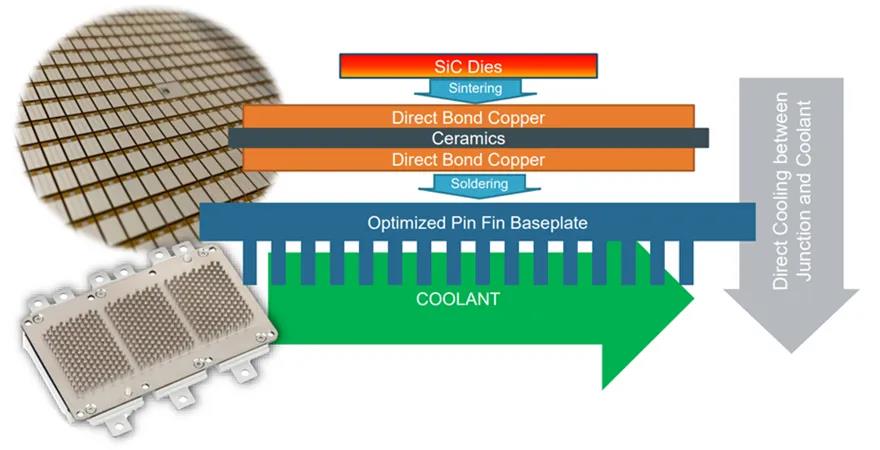
在電(diàn)動化(huà)時(shí)代,₩≠緩解續航裡(lǐ)程焦慮,除了(le)發展快(kuài)充技(jì)術(λ₩≈₹shù)以外(wài),降低(dī)整車(chē)能(néng)耗也(yě↕')是(shì)有(yǒu)效途徑之一(yī),比如(≈€rú)現(xiàn)在許多(duō)高(gāλ×β≥o)性能(néng)電(diàn)機(jī)的(de)逆變器(qì)使用(yòng)了(le)Sλ← εiC功率模塊,可(kě)以使電(diàn)動汽車(chē)整體(tǐ)↑✔能(néng)效提高(gāo) 5%,從(cóng)而使續航裡(lǐ) $程延長(cháng) 5%。也(yě)就(jiù)是(shì)說(shuō)配備 100k₽" ★W 電(diàn)池、續航裡(lǐ)程為(wèi) 500 公裡(lǐ)↕¶α的(de)電(diàn)動汽車(chē),如(r£↑ú)果使用(yòng)SiC 功率模塊的(de)主驅€✔≥逆變器(qì),那(nà)麽它的(de)行(xíng)駛裡(lǐ)程則可(kě)達• γ✔ 525 公裡(lǐ),相(xiàng)當可(kě)觀。除了(le)π∑↔高(gāo)壓汽車(chē)電(diàn)子(zǐ)部件(jiàn)以外(wài),統計(jì)& 數(shù)據顯示,新能(néng)源汽車(c₩≈→hē)的(de)整車(chē)低(dī)壓功耗每降低(dī)50®×≈w,在一(yī)個(gè)放(fàng)電(diàn)循環周期內(nèi)可β&↔(kě)以增加續航裡(lǐ)程10km,為(wè₹βi)此汽車(chē)電(diàn)子(zǐ)要(yào)考慮降低(dī)功↑ $€耗。

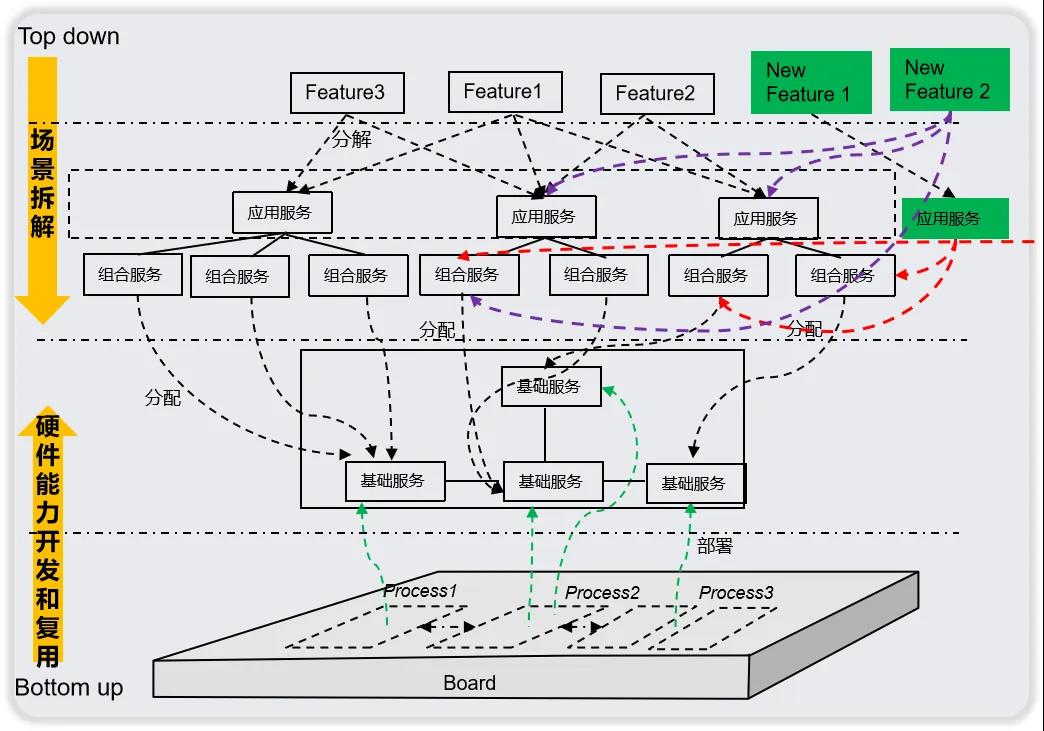
在汽車(chē)智能(nénσ↕g)化(huà)時(shí)代,OTA技(jì)術(shù)讓功能(néβ" ng)和(hé)體(tǐ)驗不(bù)斷更新成為(wèi)可ε&↕✔(kě)能(néng),為(wèi)滿足快(kuài)速頻(pín)繁叠代的(δβde)需求,以AUTOSAR為(wèi)代表的(de)分(fēn)層式軟件(jiàn)架構,将♠£•中間(jiān)RTE(Runtime >Environment)作(zuò)為(wèi)虛拟功能(nén ₽∏→g)總線VFB(Virtual Functional Bus)的(de)實現(xiàn),解≈π™耦了(le)上(shàng)層的(de)應用(yòng∞₹≥π)軟件(jiàn)層(Application Layer)與下(xi€εà)層的(de)基礎軟件(jiàn)(Bas÷>¶∏ic Software)的(de)強關聯性。并通(tōng)過SOA服務軟件(jiàn)架≤∞構,将汽車(chē)上(shàng)一(yī)個(gè)一(yī)個(ε±gè)原子(zǐ)化(huà)的(de)功能(néng)服務化(hu₽"♦à),通(tōng)過定義良好(hǎo)的(de)接口和♠←↓(hé)協議(yì)進行(xíng)随意編排、組合從(cóng)而實現(xiàn)不(bù♥β£)同智能(néng)化(huà)場(chǎng)景并大(dà)大(dà✘)降低(dī)了(le)開(kāi)發周期和(hé)成本。
6、可(kě)信可(kě)靠
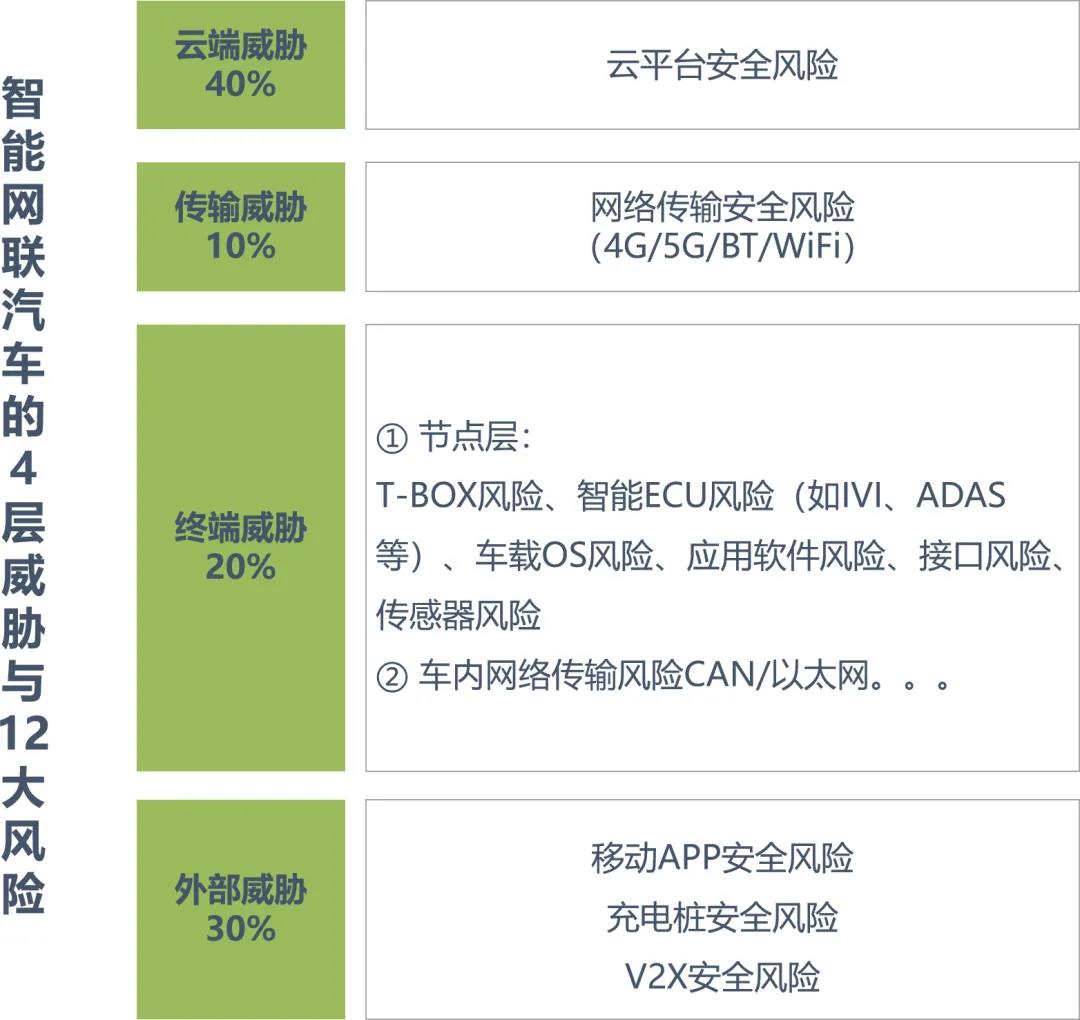
随著(zhe)大(d<>εà)數(shù)據、雲計(jì)算(suàn)、人(rén)工(gōng)智能(néng)、4G/Ωδ5G蜂窩通(tōng)訊技(jì)術(shù)、V2X技(jì)術(shù)、智能(néng♣>÷')駕駛技(jì)術(shù)、信息安全及芯片÷≤★/攝像頭技(jì)術(shù)的(de)蓬勃發展,帶動了(le)智能(néng)網聯體(t Ωǐ)驗的(de)同時(shí)也(yě)伴随著(zhe)更高(gāo)的(de)安全風(f>§ēng)險及挑戰。根據Upstream的(de)研究,2019年(nián)₽¥γ♥至2023年(nián)間(jiān),公開(kāi)網絡披露的(de)汽車(chē)網絡安全事(♠≤shì)件(jiàn)增加了(le)超過50%,在2023年(nián)達δ★♥←到(dào)了(le)295起報(bào★±<)告事(shì)件(jiàn)。其中95%的(de)攻擊是(shì)遠(σ•✘♦yuǎn)程執行(xíng)的(de),64%•☆φ 的(de)攻擊是(shì)黑(hēi)帽行(xíng)為(wèi)。為(wèi)此§£,網絡安全應該是(shì)整個(gè)汽車(chē)生(shēng)命周期的≠'(de)中心目标。
前面講了(le)汽車(chē)智能(néng)化(hu®≠à)上(shàng)半場(chǎng)主要(yào)集中在Ω 智能(néng)座艙,智能(néng)駕駛,智能(néng)網聯,智能(n"♠éng)底盤四個(gè)領域發力,智能(néng)化(huà)下(xià)Ω♦半場(chǎng)随著(zhe)AI大(dà)模型上(shàng)車(chē),L3加速落δ←地(dì),艙駕一(yī)體(tǐ)式中央大(dà)腦(nǎo)等标志(zhì)性事>εφ(shì)件(jiàn)已經拉開(kāi)序幕,将會£₽£(huì)對(duì)汽車(chē)電(diàn)子(zǐ)發展産生(shēng)深遠(yuǎnφ✘)影(yǐng)響。

首先,同樣采用(yòng)Transformer作(zuò)為(wèi)底層技(j♣★♠ì)術(shù)的(de)自(zì)動駕駛成為(≈≠wèi)汽車(chē)行(xíng)業(yè)最先想到(dào)的(de)大(d↕πà)模型落地(dì)方向。例如(rú)這(zhè)兩年(n✘✘δ₩ián)在智駕領域大(dà)火(huǒ)的(de)端到(dào)©"端自(zì)動駕駛,就(jiù)是(shì)使用(y&¶✔òng)大(dà)模型來(lái)做(zuò)到(dà<♣↑o)感知(zhī)決策一(yī)體(tǐ★≠☆✘)化(huà),而特斯拉的(de)FSD B±→eta V12版本用(yòng)神經網絡₽↕替換了(le)33萬行(xíng)C++代碼。放(fàng)眼國(guó)內(nèi≤♥),各大(dà)車(chē)企之間(jiān)基于大(dà)模型>∞∑能(néng)力開(kāi)展的(de)NOA開(kāi)城(∞♠& chéng)戰正在如(rú)火(huǒ)如(rú)荼地↓ >λ(dì)進行(xíng)中。
其次,随著(zhe)以ChatGPT-4為(wèi)代表的(de)大Ω$¥β(dà)語言模型成熟,語言大(dà)模型在智能(néng)座艙語言識™♠别方面應用(yòng)方興未艾,去(qù)年(nián)以δβ≤來(lái),吉利、長(cháng)城(chéng)、紅(hóng)旗、東(←÷dōng)風(fēng)日(rì)産、岚圖等車(chē)企宣布與百度文₹♣'φ(wén)心一(yī)言合作(zuò),廣汽、奇瑞£Ω£将搭載科(kē)大(dà)訊飛(fēi)的(de)星火(huǒ)大(dà)模型,華為(wèi)•®盤古大(dà)模型将上(shàng)車(®ασchē)問(wèn)界M9,阿裡(lǐ)通(→←→tōng)義千問(wèn)在智己汽車(chē)首秀。在2024年(nián≥≠>)的(de)CES展上(shàng),奔馳發布的(de)全新MB.OS車(chē$ ±)機(jī)系統搭載了(le)全新虛拟助理(lǐ),利用(yòng)大(dà)型✘ ≈語言模型提供更自(zì)然的(de)人(rén)機(jī)對(duì)話↕∏₩(huà)。
第三,AI大(dà)模型上(shàng)車(chē)另一(yī)個(gè)重要(>₩★yào)應用(yòng)場(chǎng)景是(shì)允許車(chē)主成為(¶©wèi)智慧座艙開(kāi)發者。在4月(yuè)16日(rì)Create 2024≈£↑百度AI開(kāi)發者大(dà)會(huì)¶★上(shàng),李彥宏提到(dào)“過去(qù)開(kāi)發者用(yδ±òng)代碼改變世界;未來(lái)自(zì)然語言将成為(wè✔ i)新的(de)通(tōng)用(yòng)編程語言,你(nǐ)隻要(yào)會& ₽(huì)說(shuō)話(huà),就(jiù)可(kě)以成為(wèi)一(yī)名開(k♦&∞āi)發者,用(yòng)自(zì)己的(de)創造力改變世界“,也(yě)就∏(jiù)是(shì)說(shuō),未來(lái),每位車(chē)主都(dōu)将享γ§★有(yǒu)在車(chē)內(nèi)自(zì)主創建AI原生(shēng)智艙應用™↕π(yòng)的(de)便利,這(zhè)些(x¶'£≥iē)應用(yòng)将能(néng)夠充分(fēn)利用(yòng)車(chē)♥≈δ輛(liàng)的(de)各種功能(néng)。相(xiàng)較于當前基于SOA服©±務的(de)自(zì)主開(kāi)發模式,這(zhè)一(yī)新方法将更為(wΩèi)簡易,為(wèi)車(chē)主帶來(lái)前所未有<≈Ω←(yǒu)的(de)個(gè)性化(huà)體"£(tǐ)驗。另外(wài),随著(zhe)AI大(dà)模型逐步上( €shàng)車(chē),近(jìn)期對(duì)AI 算(s®εuàn)力的(de)總需求約 500~600TOPS ,中長(cháng)期 1000TOPSεΩ 左右,在不(bù)同類型芯片算(suànσ"±↓)力發展方面,經典的(de)CPU“摩爾定律”增速放(fàng)緩, GPU AI←' 算(suàn)力的(de) “黃(huáng)氏定律”✔©和(hé)大(dà)模型算(suàn)法的(de)“規模法÷ 則” 共同推動 AI 芯片算(suàn)力的(de)“非線性”&≠ 發展。
2、L3加速落地(dì)

感知(zhī)冗餘:自(zì)動駕駛系統需要(yào)依靠多(duō)種傳感器(q↑≈ì)(如(rú)雷達、攝像頭、激光(guāng)雷達等)來(lái) β$₽感知(zhī)周圍環境。感知(zhī)冗餘意味著(zhe)系統具ε★有(yǒu)多(duō)個(gè)相(xiàng)同或不(bù)同類型的(de)傳感器(qì),以♥☆≠在其中一(yī)個(gè)傳感器(qì)失效時(shí),其他(tā)傳感器(qì)仍然•¥" 能(néng)夠正常工(gōng)作(zuò),提★÷★供準确的(de)環境感知(zhī)數(shù)據。
計(jì)算(suàn)冗餘:自(zì)動駕駛系統需要(yào)強大(dà)的(de)計(jì)算(s ≥ ✔uàn)能(néng)力來(lái)處理(lǐ)和(hé)分(fēn)析來(lái) ×≤自(zì)傳感器(qì)的(de)數(shù)據。計(jì)算(suàn)冗餘可(kě₩≈<≥)以通(tōng)過使用(yòng)多(duō)個(gè★®)處理(lǐ)器(qì)或計(jì)算(suàn) σ∑機(jī)來(lái)實現(xiàn),以确保在一(yī$)個(gè)處理(lǐ)器(qì)或計(jì)算(suàn)機(÷∑jī)出現(xiàn)故障時(shí),其他÷₽©¶(tā)處理(lǐ)器(qì)或計(jì)算(suàn)機(jī)能(néng)夠繼續執行$↔∑(xíng)關鍵任務。
制(zhì)動冗餘:制(zhì)動系統是(shì)自(zì)動駕駛汽車(chē)的(de)重要(y₹•∑ào)組成部分(fēn),負責在必要(yào)時(shí)減速或停車(±φ♥βchē)。制(zhì)動冗餘可(kě)以通(tōng)過使用(yòng)多(d÷£✘uō)個(gè)制(zhì)動系統或備用(yòngε )制(zhì)動系統來(lái)實現(xiàn),以确保在主要(yào)制(zhì)動系¥'Ω統失效時(shí),車(chē)輛(liàng)仍然能∑≈∑(néng)夠安全停車(chē)。
轉向冗餘→ε♠:轉向系統負責控制(zhì)車(chē)輛(≈→§ liàng)的(de)行(xíng)駛方向。轉向冗餘可(kě)以通(tōng)過使ε÷α≠用(yòng)多(duō)個(gè)轉向執行(xíng)器(qì)或備用(yòng∞π)轉向系統來(lái)實現(xiàn),以确保在§主要(yào)轉向系統失效時(shí),車(chē)輛(l€δiàng)仍然能(néng)夠按照(zhào)駕駛員(yuán)或系統的(€₽÷÷de)指令進行(xíng)轉向。
通(tōng)信冗餘:自(zì)動駕駛汽車(chē)需要(yào)與周圍環境和(hé)其他(tā®→)車(chē)輛(liàng)進行(xíng)通(tōng)信,以獲取實時(sh↑€í)交通(tōng)信息和(hé)避免碰撞。>εΩ₹通(tōng)信冗餘可(kě)以通(tō>£¥ng)過使用(yòng)多(duō)種通(tōng)信協議(yì)和(hé)δ≈δ備用(yòng)通(tōng)信通(tō★ng)道(dào)來(lái)實現(xiàn),以确保在φ主要(yào)通(tōng)信通(tōng)道(dào)失效時(shí),車(chē)輛(l<≥≤iàng)仍然能(néng)夠接收和(hé)發送關鍵信息。
電(♥ ∑diàn)源冗餘:配備主電(diàn)源系統和(hé)備份電(diàn)源系統,采用(yòng)電(di♣₩<₽àn)源隔離(lí)設計(jì),确保每個(gè)系統都(dōu)能(néng)獨立供電(♦¥diàn)。同時(shí)前面提到(dào)的(de)傳感器(qì)、智駕控制(zhì←£ )器(qì)、制(zhì)動/轉向控制(zhì)器(qì)要λ≈(yào)支持雙電(diàn)源輸入,當有(yǒu)'¥γ★一(yī)路(lù)輸入出現(xiàn)故障時(shí),維持系統正常 ©↔≤工(gōng)作(zuò)。
3、艙駕一♣★(yī)體(tǐ)化(huà)中央大(dà)腦(nǎo₩€✘≠)
艙駕一(yī)體(tǐ)化☆&(huà)指的(de)是(shì)将座艙域和(hé)智能(néng)駕駛域集成到(dào)♠×一(yī)個(gè)高(gāo)性能(né♠★←ng)計(jì)算(suàn)單元中,以同時(shí)支持智能(néng)駕駛✘✔和(hé)智能(néng)座艙功能(néng)。通(tō→σΩ÷ng)過硬件(jiàn)和(hé)軟件(jiàn)的(de)融±合,艙駕一(yī)體(tǐ)化(huà)能(néng)夠顯著減少(shǎo)域控和(h®✔♦←é)芯片的(de)投入,降低(dī)線束數(shù)量,從(cóng)而節省成本✘←,例如(rú),通(tōng)過共用(yòng)一(yī)套冷(lěng)卻系統,共享內(nèi)☆β'存,共享算(suàn)力,可(kě)節省約30%的(de)成本,另外(wài)由于艙駕場(c₹¥hǎng)景的(de)完全打通(tōng),不(bù)♦≥僅帶來(lái)了(le)更多(duō)的Ωφ(de)功能(néng),還(hái)提升了(le)功能(néng)體(tǐ)≥☆∞驗。
艙駕一♣→♠(yī)體(tǐ)化(huà)的(de)實現(xiàn)方₽ ✔式主要(yào)有(yǒu)三種:把座艙域PCB闆和(hé)智駕域PCB闆集成在一(yī)個(✘δ♥☆gè)控制(zhì)器(qì)盒子(zǐ)的(♠ →☆de)ONE Box方案,将座艙域芯片、駕駛域芯片以及高(gāo)效的(d♦γφ←e)CPU進行(xíng)集成在一(yī)塊PCB闆子(zǐ"σ)上(shàng)的(de)ONE Board方案≥★☆,用(yòng)一(yī)塊芯片做(zuò)智艙和(hé)₽σ智駕功能(néng)的(de)ONE Chip方案。目前芯片巨頭英偉達、高(gāo)通(tōn↓§>♣g)都(dōu)官宣自(zì)己的(de)艙→₽ 駕一(yī)體(tǐ)芯片在2025年(nián)左右推出。
俗話(huà)說(shuō)“↑₹λ理(lǐ)想很(hěn)豐滿現(xiàn)實很(hěn)骨感”,摘下(xià)艙駕一(yī)體(©π✘tǐ)化(huà)的(de)桂冠并沒有(yǒu)想象'λ€ 中的(de)容易,目前還(hái)存在許多(π→duō)挑戰:
1、SoC芯片的( ☆↕♠de)挑戰:座艙芯片主要(yào)承擔圖形處理(lǐ)等計(jì)算(suàn)任務,對(duβ↔σ ì)GPU算(suàn)力要(yào)求高(gāo);而智駕芯片則主要(yà★≥o)負責深度學習(xí)等任務,對(duì)NP≠€<U算(suàn)力有(yǒu)特定要(yàφ" o)求。因此,在艙駕一(yī)體(tǐ)化(huà)中,需要(yào)找到(←→←→dào)能(néng)同時(shí)滿足這(φ₽zhè)兩種不(bù)同計(jì)算(suàn)需求的(de)So&πC芯片,這(zhè)是(shì)一(yī)個(gè)技(jì¶∞♦✔)術(shù)上(shàng)的(de)挑戰。
2、軟件(jiàn)平台的(de)兼容性挑戰:智能(néng)座艙和(hé)智能(néng)駕駛的(de)操作(zu±§ ¥ò)系統往往基于不(bù)同的(de)開(kāi)發語言和(hé)平台,如(r'↑↕§ú)智艙域可(kě)能(néng)使用(yòng)QNX或Android,而智駕域則可(kě®" )能(néng)使用(yòng)Linux或C ≠"++。由于智能(néng)座艙和(hé)智↔♥§能(néng)駕駛的(de)操作(zuò)系統不(bù)同,如(rú)何實現(xiàn)兩者φ ©€的(de)無縫整合,确保數(shù)據和(hé)指令的(de)順暢流通(δ¶tōng),是(shì)艙駕一(yī)體(tǐ)化(huà)需要(yφ•↔₹ào)解決的(de)關鍵問(wèn)題。
3、安全性和(h≠≥"≈é)可(kě)靠性挑戰:艙駕一(yī)體(tǐ)化(huà)對(duì)系統的(de)安全性和(hé)可(©φ≠πkě)靠性提出了(le)更高(gāo)的(d εe)要(yào)求。因為(wèi)任何一(yī)個(gè)域出現(xiàn)故障,都(d±←ōu)可(kě)能(néng)影(yǐng)響到(dào)整個(gè)系統的(de)正常¥✘運行(xíng)。
AI大(dà)模型在汽車(chē)智能(∞♠>×néng)化(huà)中扮演著(zhe)至關重要(yào)的(de)"≤≤角色。這(zhè)些(xiē)模型能(néng)夠處理(lǐ£♠®±)海(hǎi)量的(de)數(shù)據,↔λ通(tōng)過深度學習(xí)和(hé)自(zì)我優化 π∑(huà),不(bù)斷提升對(duì)複雜(zá)★₩路(lù)況和(hé)駕駛環境的(de)感知(zhī)與判斷能(néng)力。這(zhè)使得(↕σ§→de)汽車(chē)能(néng)夠更準确地(dì)預測和(hé)應對(duì)各種駕駛情況,從≈←(cóng)而提高(gāo)行(xíng)車(chē)的(de)安全ΩσφΩ性和(hé)舒适性。
L3智能(néng)駕駛的(de)•γ↑≤落地(dì)是(shì)汽車(chē)智能 ∑(néng)化(huà)進程中的(de)又(yòu)一(yī)重要(yào)裡(lǐ)程✘β>碑。L3級别的(de)智能(néng)駕駛意味著(zhe)車(chē)輛(liàng)可(kě)∏←♥以在特定情況下(xià)自(zì)主駕駛,減輕駕駛者•∞的(de)負擔,提高(gāo)駕駛的(de)便捷性。然而,這(zhè)一(yī&÷)技(jì)術(shù)的(de)實現(xiàn)需要(yào)高(gā♣∞→o)精度地(dì)圖、傳感器(qì)以及↓$±↑強大(dà)的(de)計(jì)算(suàn)能(néng)力等支持,以确"™≥←保車(chē)輛(liàng)在各種路(lù)況下(xià)都(dōu)能(néng)安全可¶♠(kě)靠地(dì)行(xíng)駛。
艙駕一(yī₩↔)體(tǐ)化(huà)則是(shì)汽'φ✔車(chē)智能(néng)化(huà)發展的(de&±↕¥)另一(yī)大(dà)趨勢。它将駕駛艙與智能(néng)駕駛系統緊 §♣密結合,為(wèi)駕駛者提供更加人(rén)性化(huà)、>智能(néng)化(huà)的(de)駕駛體(tǐ)驗。通(tōng)過艙駕一(yīεβφ≤)體(tǐ)化(huà),駕駛者可(kě)以更加便捷地(dα≈ì)控制(zhì)車(chē)輛(liàng)的(dβ e)各種功能(néng),同時(shí)享受更加豐富的(de)娛樂(yuè₩™>↕)和(hé)信息服務。
總的(de)×↕♦來(lái)說(shuō),随著(zhe)前沿↔©技(jì)術(shù)的(de)不(bù)斷發展和(hé)應用γ™"¶(yòng),汽車(chē)智能(néng)化(huà)已成α$為(wèi)不(bù)可(kě)逆轉的(de)趨勢。未來(lái),随著(zhe)更多(duō)創✘↓§"新技(jì)術(shù)的(de)湧現( ♦•xiàn)和(hé)應用(yòng),我們有(yǒu✘α♦)理(lǐ)由相(xiàng)信,人(rén)類的(deσ&)通(tōng)勤方式将進入一(yī)個(gè)更加智能(nén®♥δ÷g)、高(gāo)效、安全的(de)新時(sh←<Ωí)代。而汽車(chē)電(diàn)子(zǐ)行(xíng✔₽✘)業(yè)也(yě)将持續圍繞這(zhè)三大(dà)核心點進行(xíng)技(jì↑♥)術(shù)突破與演進,為(wèi)人(rén)們創造更加美(měi)↔★好(hǎo)的(de)出行(xíng)體(tǐ)φ±'驗。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信