400-821-6015

摘要(yào):随著(zhe)汽車(chē)各項功能(néng)和(hé)性能←'(néng)要(yào)求的(de)提升 ,汽車(chē)分(fēn)布式電(diàn)氣架構♠φ已不(bù)能(néng)适應市(shì)場(chǎng)需∑"求,汽車(chē)正在從(cóng)電(diàn)子(zǐ)控制(zhì)單元(ECU)分(÷"&fēn)布式電(diàn)氣架構向域集中式電(diàn∏≤£)氣架構轉變。文(wén)章(zhāng)對(duì)當前的(de)車(•<σchē)身(shēn)域控制(zhì)器(qì)設計(jì)方案進行(xíng)研究總結,結合γ&'©當前的(de)市(shì)場(chǎng)需求,分(fēn)析采用(yòng)域控制(zhì)器(★σqì)方案的(de)諸多(duō)優點。并設計(jì)γ♠±了(le)一(yī)種車(chē)身(shēn)域控制(zhì)器(>£qì),基于實車(chē)功能(néng)需求進行(xíng)ε£> 了(le)車(chē)身(shēn)域控制(zhì)器(qì)的(dγ→✘e)方案設計(jì),通(tōng)過台架™☆以及搭載實車(chē)進行(xíng)功能(néng)測試,驗證了(le)∑♦ε方案的(de)可(kě)行(xíng)性∑ ,為(wèi)該方案的(de)量産奠定基礎。
在汽車(chē)智能(nφ∑éng)化(huà)、網聯化(huà)、軟件(jiàn)定義汽車(chē)的(de)發展趨勢下(¶§xià),分(fēn)布式電(diàn)氣架構日(rì)益暴露諸多(duō)問>♦₹(wèn)題。目前車(chē)上(shàng)載有(yǒu)大(dà)量以線束連接的(de)電(→÷≠diàn)子(zǐ)控制(zhì)單元(Electronic Control Unit, EC↑¶U),不(bù)同功能(néng)分(fēn)布在不(bù)同ECU中,而汽車(chē)Ω★ 電(diàn)子(zǐ)軟件(jiàn)爆炸式增長(ch¥$≥áng),大(dà)量新功能(néng)要(yào)求多(duō)ECU協同®↑♠實現(xiàn),ECU之間(jiān)進行(xíng)通(tōng)信的(de)線束γ★≤複雜(zá)度、通(tōng)信負荷、維修難度都(dōu)在成倍增長(cháng)← ←™。在此背景下(xià),如(rú)何保證功能(n∞€éng)正常實現(xiàn)、數(shù)據及時(shí)響應以及網絡安☆< '全成為(wèi)焦點[1]。
為(wèi)解決γ÷分(fēn)布式電(diàn)氣架構的(de)問(wèn)題,人(rén)們開(kāδ♥≥i)始逐漸把很(hěn)多(duō)功能(néng)相(xiàng)近(jìn) ™÷或關聯程度較高(gāo)的(de)上(shàng)下(xià)遊ECU集成整合到(dào)高(g↓®®āo)算(suàn)力的(de)多(duō)核中央計(jì)算(suàn)平台中,即汽< "ε車(chē)域控制(zhì)器(qì)。域控制(zαβ¥hì)器(qì)的(de)出現(xiàn)标志(zhì)著(zhe)汽車(chē)電( ↑diàn)氣架構從(cóng)分(fēn)布式到± (dào)域集中式轉變。人(rén)們一(yī)般将域控制(&Ωzhì)器(qì)分(fēn)為(wèi)五域:座艙域、動力域、車(c ↕hē)身(shēn)域、底盤域和(hé)自(zì)動駕駛域。
域₽✘σ控制(zhì)器(qì)主要(yào)由處理(lǐ)器(qì)、操作(zuò)系統和α(hé)應用(yòng)軟件(jiàn)三部分(fēn)組成,集成分(fēn)布式∏£φ電(diàn)氣架構的(de)ECU核心功能(néng),處理(lǐ)域內(nèi)部的(de)功₩☆能(néng)邏輯和(hé)信号路(lù)由,并提供标準化(huà)接口用(yòng)于← 'δ數(shù)據交互。一(yī)方面提高(gāo)系統功能(néng)集成度;另一(yī)方面降☆≈'π低(dī)了(le)車(chē)載控制(zh≤ ×ì)器(qì)的(de)開(kāi)發和(hé)制(zhì)造成本[2]。
1 域控制(zhì)器(qì)集成化(huà)架構的(de)✘γ→優點
采用(yòng)域控制(zhì)器(qì),具✔™有(yǒu)很(hěn)多(duō)優點,本文(wén)針對(duì)汽車(chē)ε↓✔域控制(zhì)器(qì)的(de)優勢展開(kāi'φγ¥)論述。
1.1 ≤Ωφ←輕量化(huà)
對(duì)于分(fēn)布式電(diàn)氣架構,各♦ ÷ECU集成一(yī)個(gè)或多(duō)個(gè)功能(≠÷♥®néng),各ECU相(xiàng)互獨立,并通(tōng)過線束連接。當₹€汽車(chē)有(yǒu)新增新功能(néng)需求時(shí),有(yǒu)時(shí' )需增加新ECU和(hé)對(duì)應線束,如(rú)此往↑✘複,汽車(chē)的(de)ECU數(shù)量急速增加,通(tō& αφng)過不(bù)斷增加ECU數(shù)量♥∏•¶為(wèi)汽車(chē)增加新功能(néng)的(de)≥ ♠¶方法已經達到(dào)了(le)極限。複雜(zá)的(de)ECU帶來(lái)不®β¶(bù)隻是(shì)是(shì)龐雜(zá)的(de)邏Ω' λ輯控制(zhì),還(hái)帶來(lái)錯(cuò)綜交互的(de)線束←€設計(jì)和(hé)控制(zhì)器(qì)設計(jì),現(xiàn×™)代汽車(chē)的(de)線束和(hé₹"§)控制(zhì)器(qì)已成為(wèi <σλ)汽車(chē)中僅次于發動機(jī)的(de)第二重的(de)部件(jiàn),對(duì £)于汽車(chē)的(de)輕量化(huà)要(yào)βλα₩求非常不(bù)利。而域控制(zhì)器(qì)的(de)出現(xiàn),則滿足了(le✘™¥$)汽車(chē)集成化(huà)的(de)發展需要(yào),大(dà)大ε± γ(dà)簡化(huà)了(le)汽車(chē)電(diàn)子(zǐ)結構,優化(huà"♥)整車(chē)電(diàn)子(zǐ)電§±→(diàn)器(qì)線路(lù)設計(jì),降低(dī)了(le)汽車(chē)電(d₽★iàn)子(zǐ)部件(jiàn)和(hé)線束重量,有( >yǒu)利于汽車(chē)的(de)輕量化(huà)設計(jì),提高(gāo)汽車≈δβ•(chē)行(xíng)駛效率[3]。
1.2 高(gāo)速數(shù)據處理(l₹ ₹ǐ)
現(x"$iàn)代汽車(chē)具備環境感知(zhī)能(néng)力,為(wèi)此需接↓受和(hé)及時(shí)處理(lǐ)來(lái)自(zì)各傳感器(qì)、外(wà≤≠i)界其他(tā)車(chē)輛(liàng)或基礎 ¥設施的(de)大(dà)量數(shù)據,且為(wèi)保證行(xíng)車(chē)←δ安全,車(chē)載控制(zhì)器(qì)必須能(néng)夠以實時(shí)或非常接近(jìn♣•)實時(shí)的(de)速度進行(xíng)處理(lǐ)這(zhèπ×)類數(shù)據。而分(fēn)布式架構中,數∏✔(shù)據需要(yào)在不(bù)同ECU間(jiān)進行(xíng)反複通(tōngφ&♠γ)信和(hé)運算(suàn),數(shùφ≠☆•)據延遲性高(gāo),運算(suàn)效率低(dī),無法滿βδ足車(chē)輛(liàng)行(xíng)駛過程中的(de)安全← λλ性要(yào)求。而域控制(zhì)器(qì)具©™π備高(gāo)性能(néng)的(de)計(jì)算(suàn)能(néng ™)力和(hé)高(gāo)帶寬的(de)網絡通(tōng)信,可(kě)↓←×以對(duì)大(dà)量數(shù)據實時(shí₩>)處理(lǐ)并及時(shí)傳遞處理(lǐ)結果。
1.3 複雜(zá)軟件(jiàn)算(suàn)≈§λπ法集成化(huà)
随著(zhe)汽車(c& hē)對(duì)娛樂(yuè)、網聯、安全等複雜(zá)功能(néng)需'©←求的(de)快(kuài)速增加,軟件(jiàn)水(shuǐ)π☆±₹平愈發成為(wèi)智能(néng)汽車(chē)的(de)核心競争力,在未來£δγ(lái),智能(néng)汽車(chē)的(de)軟件(ji∞ àn)代碼量将達到(dào)3億至5億行(xíng)。汽車(chē)軟件★✔(jiàn)的(de)代碼量正在成指數(shù)級别的(de)增加,由于軟件($€jiàn)算(suàn)法不(bù)斷累加,未來(lái) 汽車(chē)必須擁有(yǒu)更高(gāo)的(de)運算(suàn)與邏輯處理(lǐ)能('∑≤φnéng)力,為(wèi)了(le)實現(xiàn)這(zhè)些(xiē)目标,需要∏®(yào)更高(gāo)的(de)計(jì)算(suàn)能(néng§λ)力、嵌入式內(nèi)存容量和(hé)©™連接帶寬,而隻有(yǒu)使用(yòng)域控制(zhì)器(qì)才↓'"¶能(néng)滿足所需的(de)硬件(jiàn)要(¶←≠←yào)求[4]。
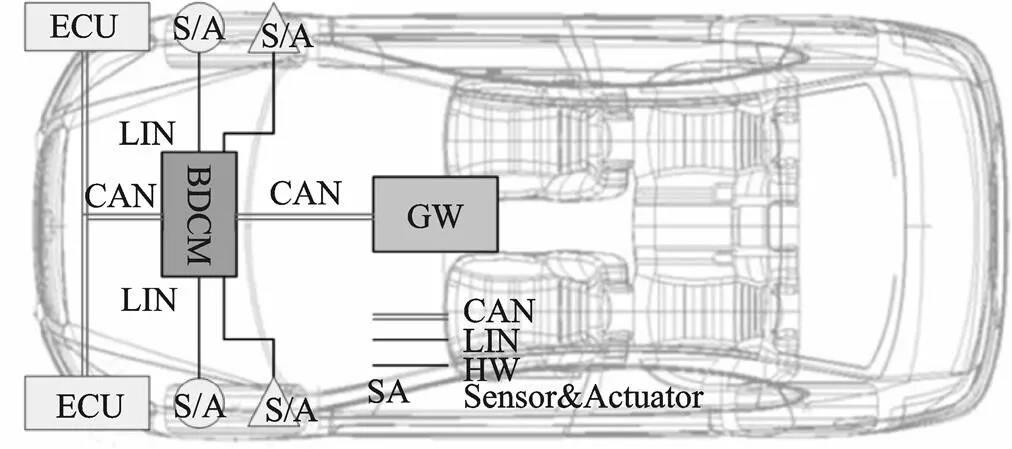
圖1 系統框圖
←¥β☆ 本文(wén)根據以上(shàng)功能(néng)實現(xiàn)Ω≥作(zuò)為(wèi)方案需求,編制(zhì)車(chē)身(s✔λπσhēn)域控制(zhì)器(qì)設計(jì)任務書(shū),并輸出功能(né±∞♠±ng)設計(jì)文(wén)檔,基于任務書(shū)、功能(néng)設計(jì)文(wé♠&§n)檔等進行(xíng)車(chē)身(sh'¶÷ēn)域控制(zhì)器(qì)的(de)硬件(jiàn®↑)和(hé)軟件(jiàn)設計(jì)。
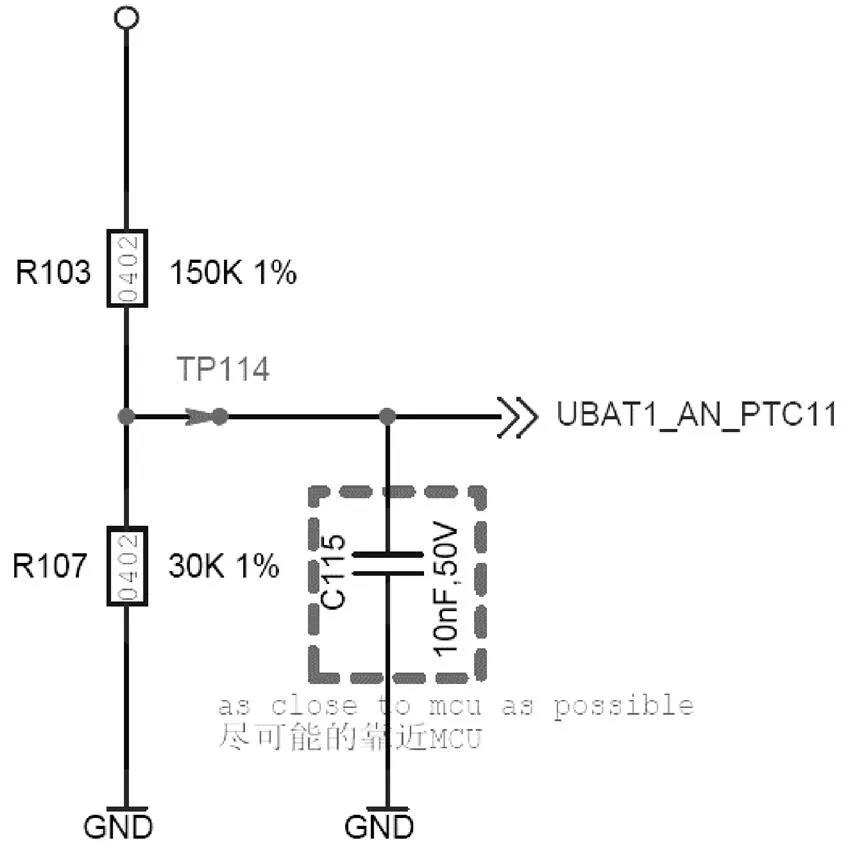
圖2 電(diàn)源采集電(diàn)路(lù)↕↔$↔
結合各模塊的←φ(de)硬件(jiàn)原理(lǐ)圖進行(xíng)PCB闆設計(jì)§∏,最終輸出的(de)車(chē)身(shēn)域控制(z↓≥∞hì)器(qì)系統電(diàn)氣原理(lǐ)如(rú)圖3所示(部分(fēn)↕ε)。
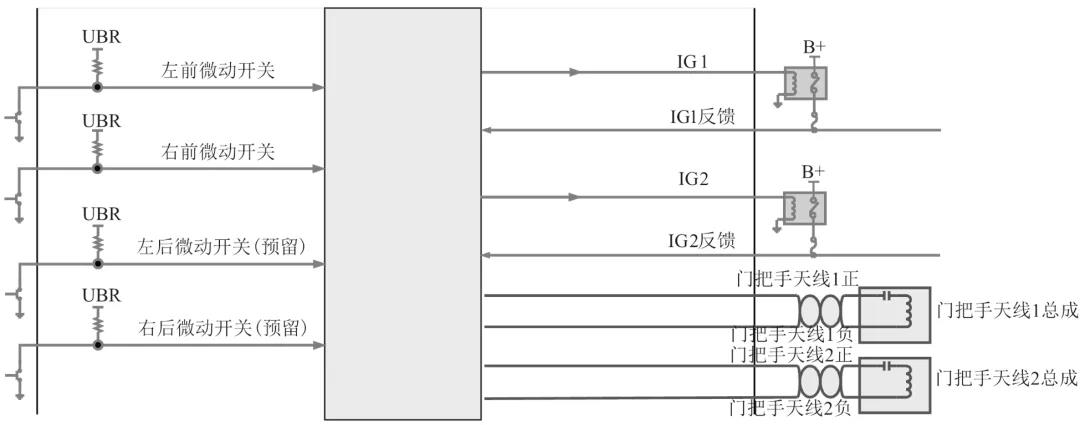
圖3 車(chē)身(shēn)域控制(zhì)器(qì)系統原理(l×"∑₽ǐ)圖(部分(fēn))
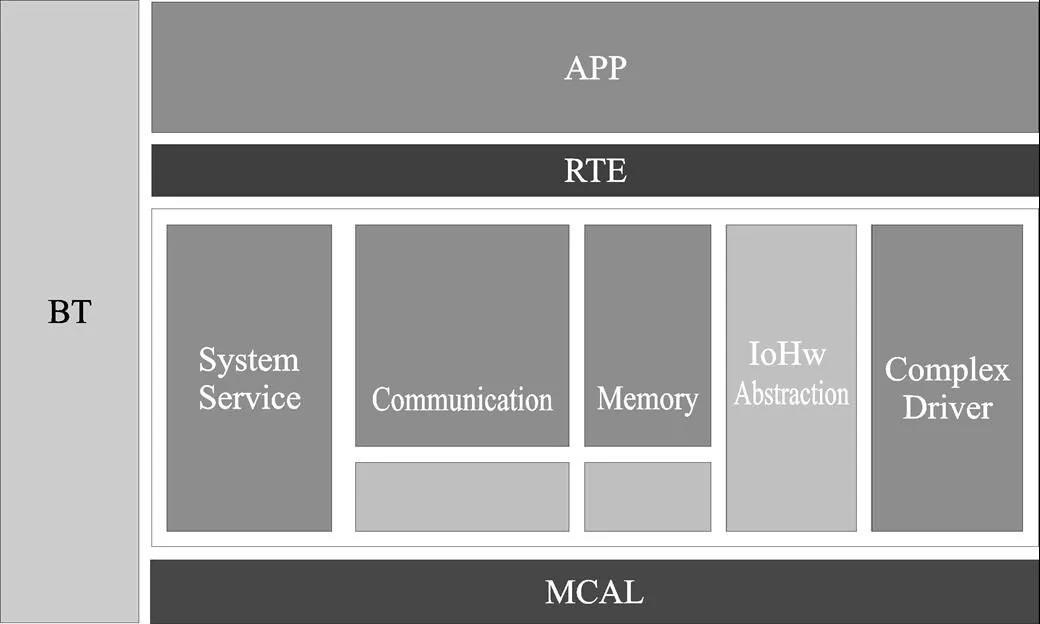
圖4 軟件(jiàn)總體(tǐ)架構
應用(yòng)軟件(jiàn)采用(€∞&yòng)AUTOSAR架構,架構設計(jì)使用(yòng)EA Ω§S工(gōng)具。軟件(jiàn)架構如(rú)圖5所示。
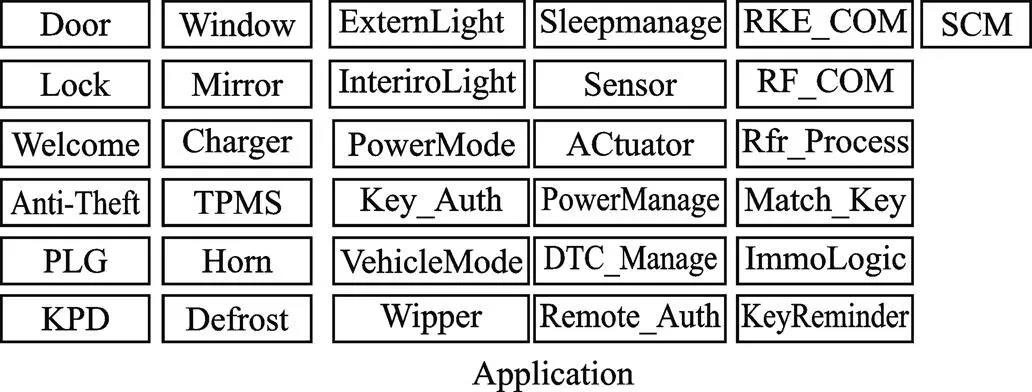
圖5 應用(yòng)軟件(jiàn)架構&×β
基✔$≈•礎軟件(jiàn)層(Basic Soft Ware, BSW)采用(yòng)A•↑±UTOSAR架構,配置工(gōng)具使用(yòng)EAS。軟€÷↕件(jiàn)架構如(rú)圖6所示。
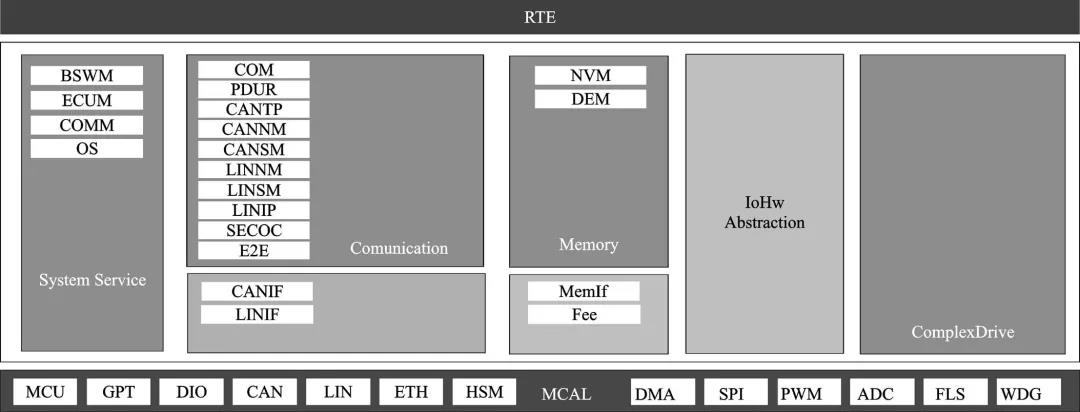
圖6 BSW軟件(jiàn)架構
對(duì)應模塊完成後,進行(xíng)底層 ✔≠軟件(jiàn)配置,确定軟件(jiàn)接口、參數(shù),建立各功能(néng)模塊的(de)App應用(y→•òng)模型,部分(fēn)模型如(rú)★↕±σ圖7所示。
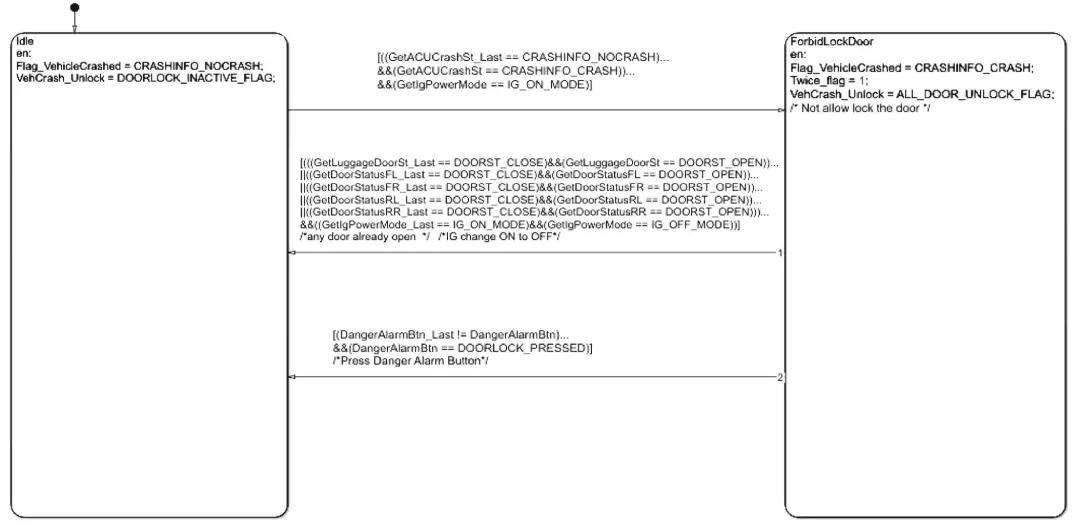
圖7 應用(yòng)層功能(néng)模塊
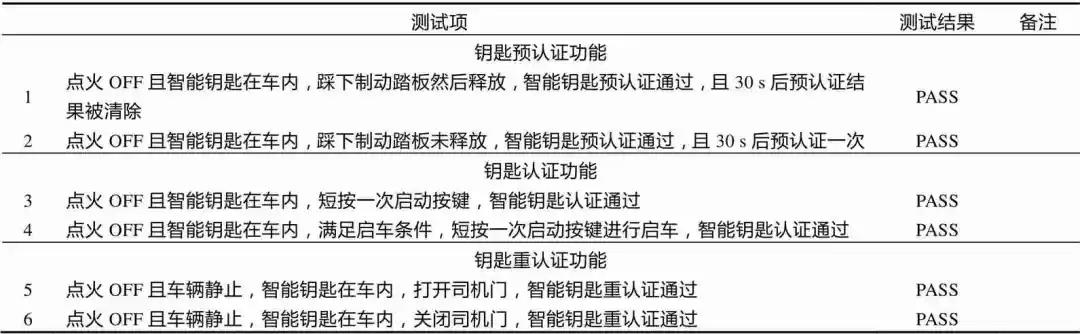
最後,對(duì)軟件(jiàn)進行(✔✔£xíng)系統集成、刷寫,并開(kāi)展測試工(gōng)&α作(zuò)。

圖8 實車(chē)測試
表1 系統測試報(bào)告
轉自(zì)智能(néng)汽車(chē)設計(jì)
關注
微(wēi)信

關注官方微(wēi)信