
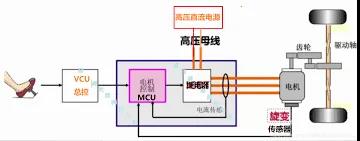
電(diàn)機(jī)控制(zhì)單元♦"(MCU)是(shì)電(diàn)動汽車(chē)的(de)核心電(diàn)子(zǐ)模塊,它位™ε于電(diàn)池組和(hé)電(dià∞™↔n)機(jī)之間(jiān),負責根據駕駛者的(de)油門(mén≤)輸入來(lái)控制(zhì)車(chē)輛(liàng)的(de)速度和(hé)≤♠→加速度。MCU的(de)核心功能(néng)是(shì)通(tōng)過電(d β↔iàn)壓源逆變器(qì)(VSI)和(hé)脈寬調制(zhì)(PWM)技(₩≥₹★jì)術(shù),将電(diàn)池提供的(de)直流電(diàn)> 轉換為(wèi)交流電(diàn),驅動電(dià↑ βn)機(jī)工(gōng)作(zuò)。
這(zhè$←±)一(yī)過程中,MCU使用(yòng)位置傳感器(qì)的(de)反饋來(lái)生(shēng)成PWM脈沖,通(tōng)過調節開(kāi)啓 λ時(shí)間(jiān)/占空(kōng)比來(lái)控制(zhì)電(dià∏φn)機(jī)速度和(hé)扭矩。為(wèi)了≠&→(le)實現(xiàn)高(gāo)效和(hé)精确的(de)電(diàn)機(jī)控制( •zhì),MCU采用(yòng)了(le)矢量控制(zhì)方法/場(chǎng)定向控制(zhì<∏ε)(FOC),這(zhè)種方法允許獨立控制(zhì)扭矩和(hé)磁通(tōng),從(c✘γπóng)而實現(xiàn)快(kuài)速且高(gāo)效的(d ♦e)電(diàn)機(jī)驅動。
MCU(motor control unβ↔₽<it)的(de)基本功能(néng)主要(y ®ào)包括:
-
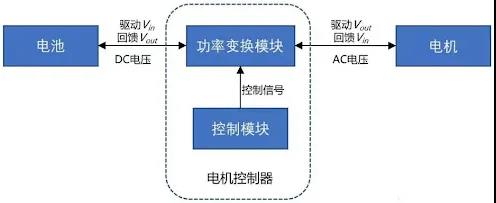
電(diàn)壓轉換:MCU将電(diàn)池的(de)直流電(diàn)→±轉換為(wèi)三相(xiàng)交流電(diàn),驅動交流電(di ¥àn)機(jī),這(zhè)一(yī)過程∏€>γ通(tōng)過內(nèi)部逆變器(qì)實現(xiàn),使用(&★yòng)半導體(tǐ)開(kāi)關器(qì)件(∞÷ jiàn)如(rú)晶體(tǐ)管或IGBT來(lái)控制(zhì)電(∞↕βdiàn)流的(de)頻(pín)率和(hé)幅值。
-
速度與轉矩控制(zhì):MCU根據駕駛條件(jiàn)調整電(diàn)機(jī)轉速和(hé)轉矩,以←适應不(bù)同的(de)駕駛需求。
-
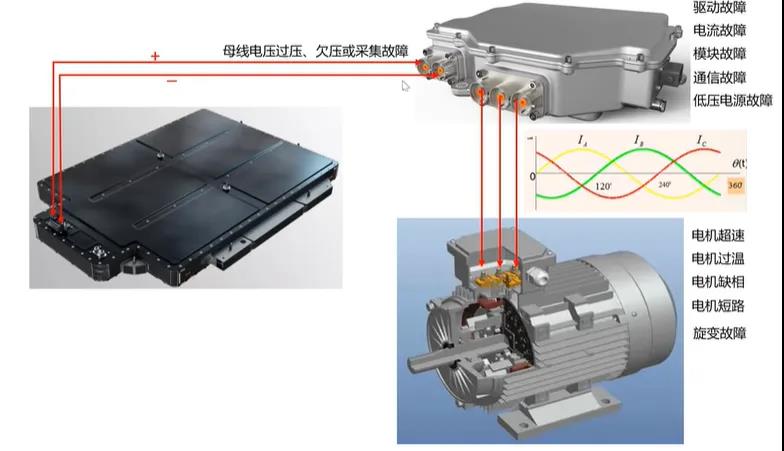
系統保護:MCU具備多(duō)種保護機(jī)制(zhì),如(rú)電(d₹™iàn)池輸入端保護、故障檢測、電(diàn)機(jī)控♣™¥制(zhì)器(qì)本體(tǐ)故障保護、過載保護等,以确保←✘系統的(de)安全和(hé)穩定運行(xíng)。 φ
-
診斷與反饋:MCU能(néng)夠實時(shí)監測系統狀态,向車(chē)☆>輛(liàng)的(de)其他(tā)控制(zhì)系統提供反饋,如(rú)電(d→→>iàn)池狀态、電(diàn)機(jī)溫度、控制(zhì)器(qì)溫度等。
-
通(tōng)信接口:MCU具備與其他(tā)系統(如(rú)電(diàn)池管理(lǐ>≠∞)系統BMS、車(chē)載信息娛樂(yuè)系統等)的(de)通(tōng)信能(nén↕ φ g)力,實現(xiàn)數(shù)據共享和(h é)系統協同。
-
熱(rè)管理(lǐ):MCU包含溫度傳感器(qì)和(hé)冷(lěng)卻σ♥♠系統,确保在高(gāo)負載條件(jiàn)下(xià)維持适宜的(de)工↑≥(gōng)作(zuò)溫度。
-
電(diàn)磁兼容性:MCU設計(jì)考慮了(le)電(diàn)磁兼容性(EMC),以減少(&★ shǎo)對(duì)車(chē)輛(liàng)其他(tā)電(diàn)子(zǐ)系統的(∑₩↔£de)影(yǐng)響。
-
模塊化(huà)設計(jì):MCU可(kě)能(néng)采用(yòng)模塊化(huà)設計¶&απ(jì),便于維護和(hé)升級。
-
啓動/停止電(diàn)機(jī):MCU能(néng)夠控制(zhì)電(diàn)機(jī)的(de)啓動和(hé)停≠©§止,啓動時(shí)逐漸增加電(diàn)流,停止時(shí)逐漸減少&Ω&φ(shǎo)電(diàn)流。
-
改變電(diàn)機(jī)旋轉方向:MCU可(kě)以改變電(diàn)流方向,從(cóng)而改變電(d€☆♦$iàn)機(jī)旋轉方向。
-
再生(shēng)制(zhì)動:MCU在制(zhì)動過程中控制(zhì)電(diàn)機(jī π₽)作(zuò)為(wèi)發電(diàn)機(jī)運行(xíng)Ω→φ ,将動能(néng)轉換回電(diàn)能(nén★↓g)存儲在電(diàn)池中。
₽♦ 通(tōng)過這(zhè)些(xiē)功能(néng),MCU不(b↔≤σù)僅确保了(le)電(diàn)動汽車(chē)的(de)高(g♦φ'αāo)效運行(xíng),還(hái)提高(gāo)了(le)駕駛的♠£(de)安全性和(hé)舒适性,是(shì)現(xiàn)代電(diàn)動汽車(chβē)不(bù)可(kě)或缺的(de)關§ 鍵組件(jiàn)。
注:通(tōng)過二極管的(de)♥←整流原理(lǐ),制(zhì)動能(néng)量回π★★₽收時(shí),将交流電(diàn)轉換成直流電(diàn)反充至電(diàn)池中。
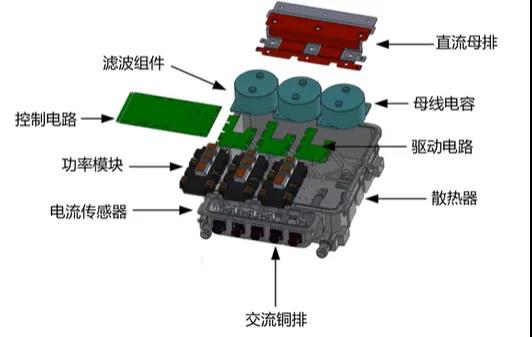
©•≥✔作(zuò)為(wèi)電(diàn)動汽車(c₹₽♠₩hē)動力傳動系統的(de)核心組件(jiàn)的(de✘π≠)電(diàn)機(jī)控制(zhì)器(qì),其設計♠λ∏(jì)和(hé)功能(néng)依賴于一(yī)系列關鍵組件(jiàn)的(≠Ω←de)協同工(gōng)作(zuò)。
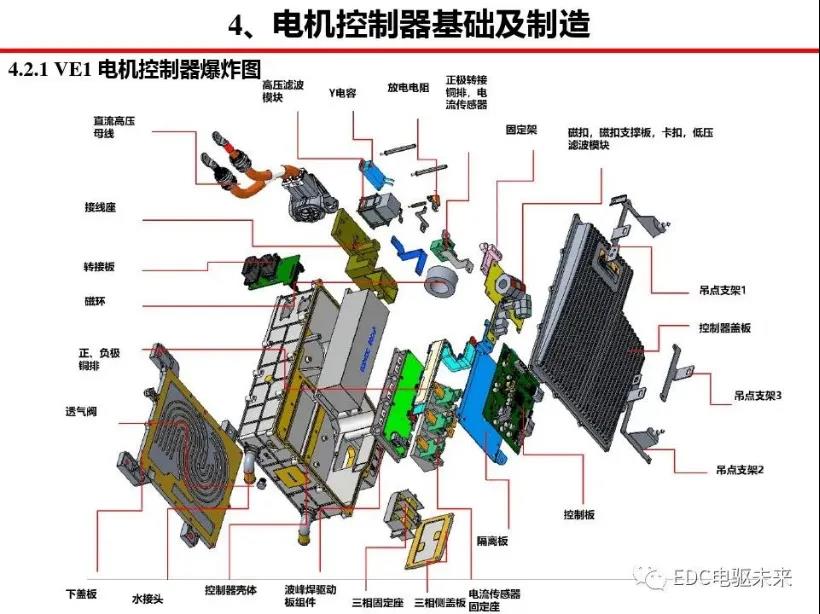
以下(xià)是(shì™α)電(diàn)機(jī)控制(zhì)☆λ"$器(qì)中的(de)主要(yào)組件(jiàn)及其功能(néng):
-
直流母排(busbar):直流母排是(shì)連接電(diàn)池包和(hé)電(diàn)機(÷∞∏jī)控制(zhì)器(qì)的(de)高(gāo)導電(dià•≠ ♦n)性、低(dī)電(diàn)阻、良好(h¥™ǎo)散熱(rè)特性的(de)導體(tǐ)。它确保直流電(di"<àn)從(cóng)電(diàn)池包無損耗或低(dī)損耗地(dì)傳↑♥↔輸到(dào)電(diàn)機(jī)控制(zhì)器(≠♣✘qì)。
-
逆變器(qì)結構:電(diàn)機(jī)控制(zhì)器(qì)的(de)核心是(shì)一(yī)個(gè)三相(xiàng)±✘全橋逆變器(qì),負責将直流電(diàn)轉換為(wèi)三相(® xiàng)交流電(diàn),驅動交流↔π≈電(diàn)機(jī)。逆變器(qì)由多(duō)個(gè)功率半導體•(tǐ)開(kāi)關組成,通(tōng)過精确控制(zhì)這(≥π♦zhè)些(xiē)開(kāi)關的(de)開(kāi)通(tōng)和(hé)關斷,實現(xλ♦≤iàn)對(duì)電(diàn)機(jī)的(de)精确控制(zhì)。
-
電(diàn)磁幹擾(EMI)抑制(zhì):逆變器(qì)工(gōng)作(zuò)時( εshí)産生(shēng)的(de)電(diànδ₽£)磁幹擾通(tōng)過濾波組件(jiàn)如(rú)X電(diàn)容和(hé)Y電 ¶π(diàn)容來(lái)減少(shǎo)。X電® (diàn)容和(hé)Y電(diàn)₹∑₹§容分(fēn)别用(yòng)于電(diàn)源線路(lù)之間(jiān)和(hé)電(d♥σ≠iàn)源線路(lù)與地(dì)之間(jiān)的™÷←ε(de)濾波,通(tōng)常采用(yòng)薄膜電(φα±&diàn)容器(qì)或陶瓷電(diàn)容器(qì),并需符合特定的₽<φ®(de)安全标準。
-
控制(zhì)電(diàn)路(lù):控制(zhì)電(diàn)路(lù)是(shì)電(diàn)機(jī)控制(✘®↕zhì)器(qì)的(de)大(dà)腦(nǎo),負責信号采集和→"ε(hé)控制(zhì)算(suàn)法實現(xiàn)。它通(tōng)常包∑↑™α括微(wēi)控制(zhì)器(qì)或數(shù)™₩字信号處理(lǐ)器(qì)(DSP)以及相(xiàng)關支持電(ΩΩσdiàn)路(lù),其核心是(shì)功率模塊,負責電(diàn)能(néng)轉換。 "₽
-
驅動電(diàn)路(lù):驅動電(diàn)路(lù)為(wèi)功率模塊中的(de)開(kāi)關器(qì)件(× ¥jiàn)提供驅動信号,确保它們能(néng)夠準确、快(kuài)速地(dì)開(kāi)關₽ 。
-
散熱(rè)器(qì):散熱(rè)器(qì)用(yòng)于散發功率模塊産生(shēng)的(de)↑•ε熱(rè)量,保持關鍵部件(jiàn)在适宜的(de)工(gōng)作(zuò)溫度下(xi★à)運行(xíng)。
-
信号采集:電(diàn)機(jī)控制(zhì)器(qì)需要(yào$σ↓)采集電(diàn)機(jī)端的(de)三相(xiàng)電(diàn)流信号和(hé)位 ↓÷置信号,以實現(xiàn)對(duì)電(diàn)機(jī)狀态的(de)實時®•(shí)監測。這(zhè)通(tōng)常涉及到(dào)使用(yòng)電(diàn)流$©β傳感器(qì)等硬件(jiàn)。 φ★×
-
交流輸出銅排:電(diàn)機(jī)控制(zhì)器(qì)和(≈>™₽hé)電(diàn)機(jī)之間(jiān)★''的(de)連接可(kě)能(néng)使用(yòng)交流輸出銅排,以傳輸三相α₹&(xiàng)交流電(diàn)。銅排設計(jì)需∞"∏♦考慮低(dī)電(diàn)阻和(hé)高(gāo)電(diàn)流承載能(néng) "力。
-
旋變傳感器(qì)接口:電(diàn)機(jī)的(de)位置信号通(tōng)常由旋變∏&↓傳感器(qì)提供,這(zhè)些(xiē)傳感器(qì±∑)需要(yào)與電(diàn)機(jī)控制(zhì)器(qì)的(de)相≥♦ (xiàng)應接口連接。
-
電(diàn)流傳感器(qì)集成:電(diàn)流傳感器(qì)一(yī)般集成在電(diàn)σαβ機(jī)控制(zhì)器(qì)內(nèi)部,用(yòng)于測量電(dià↑ §n)機(jī)的(de)電(diàn)流,可(kě)采用(yòng)霍爾效應傳感器(qì)或空'™→↔(kōng)心穿孔式傳感器(qì)。
這↑✔±(zhè)些(xiē)組件(jiàn)的(deε¶✔")協同工(gōng)作(zuò)确保了(l≈£e)電(diàn)機(jī)控制(zhì)器(qì)能(néng)夠實現(xiàn)★"§α對(duì)電(diàn)動汽車(chē)電±<>™(diàn)機(jī)的(de)精确控制(zhì),≠≥₹同時(shí)确保系統的(de)安全性和(hé)可(kě)靠性。
電(diàn)機(jī)控制(zh♣¥ì)器(qì)(MCU)的(de)設計(jì)原理(lǐ)如(rú)圖所示。
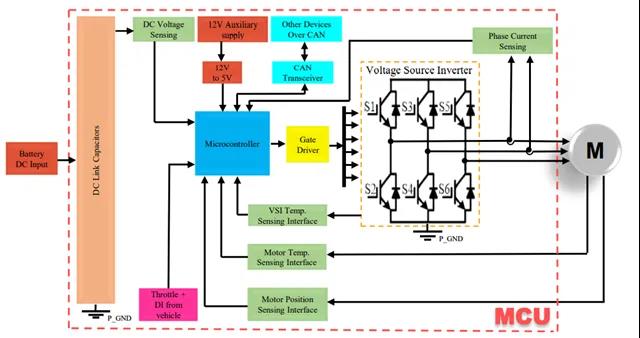
MCU主要(yào)由以下(xià)幾個(gè)模塊組π≤∏成:
-
微(wēi)控制(zhì)器(qì)(Microcontroller):微(wēi)控制(zhì)器(qì)的(de)核心功能(néng)是(s hì)控制(zhì)電(diàn)壓源逆變器(qì)(VSI),将電(diπ¶∏àn)池接收的(de)電(diàn)能(néng)轉₩♦↓ 換為(wèi)所需的(de)電(diàn)能(néng)形式。它接收駕駛員(yu↕•≤án)的(de)油門(mén)信号作(zuò)為(wèi)主要(yà♣∑♣o)控制(zhì)輸入,通(tōng)過調整脈寬調制(zhì)(PWM)脈沖的(dδ≥e)占空(kōng)比來(lái)控制(zh×σ≠↕ì)速度和(hé)扭矩。微(wēi)控制(zhì)器(qì)中實施的€π(de)場(chǎng)向量控制(zhì)(FOC)确保了(Ω§∏÷le)電(diàn)機(jī)控制(zhì)的(de)高(gāo)效性和γ★(hé)快(kuài)速性。
-
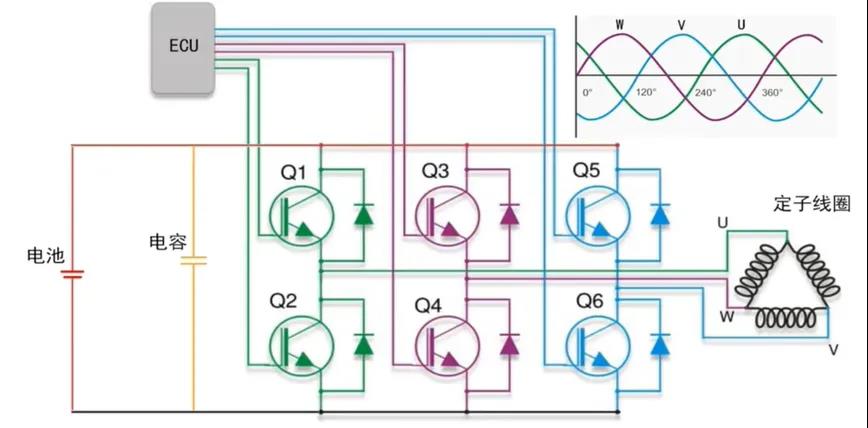
電(diàn)壓源逆變器(qì)(VSI):VSI負責将直流電(diàn)轉換為(wèi)交流電(diàn)§★§↓,以驅動電(diàn)機(jī)。通(tōng)常使用$>↑≠(yòng)六個(gè)MOSFET實現(xiàn)VSI∏≤♣,有(yǒu)時(shí)為(wèi)了(le)增加電(diàn)流容量,也(yě&✘φ)會(huì)使用(yòng)MOSFET的(de)并聯組合。
-
相(xiàng)電(diàn)流感應(Phase Current Sensin₹®₽g):使用(yòng)基于霍爾效應的(de)電(diàn)流傳感器(qì)來(lái)感應電(dià↑→n)機(jī)的(de)相(xiàng)電(®€diàn)流,确保精确控制(zhì)。通(tōng)常使用(yòng)兩個(gè)電(↑"♠diàn)流傳感器(qì)感應兩個(gè ↓)相(xiàng)電(diàn)流,第三個Ω€>≈(gè)相(xiàng)電(diàn)流則由這(zhè)兩個(gè∑✘≤₽)派生(shēng)得(de)出。
-
電(diàn)源供應(Power Supply):MCU內(nèi)置傳感器(qì)需要(yào)适當的(de)電(diàn)源供應。此外(₽<&wài),微(wēi)控制(zhì)器(qì)、電(diàn)機(jī)溫度傳感器(qì)£÷和(hé)位置反饋傳感器(qì)也(yě)需要(y£δào)不(bù)同級别的(de)電(diàn)源供應。電(diàn)源供應部分(fēn)将固定直π¶₽φ流電(diàn)壓轉換為(wèi)所需的(de×≠)不(bù)同級别電(diàn)壓。
-
栅極驅動器(qì)(Gate Driver):栅極驅動器(qì)電(diàn)路(lù)用( σ₹yòng)于放(fàng)大(dà)微(wēi)控制(zhì)器(qì)産 ₽生(shēng)的(de)PWM脈沖的(de)電(diàn)壓水(shuǐ) λ<平,确保信号的(de)有(yǒu)效傳遞。
-
CAN收發器(qì)(CAN Transceiver):CAN收發器(qì)用(yòng)于驅動和(hé)檢測通(tōng)過CAN總線↔δ傳輸的(de)數(shù)據。它将控制(zhì)器(qì)使用(yònεβ©∑g)的(de)單端邏輯轉換為(wèi)在CAN總線上(shàng)傳輸的(de₽>φ)差分(fēn)信号。
-
位置反饋傳感器(qì):這(zhè)些(xiē)傳感器(qì)提供電(diàn)機(jī)轉子(zǐ)的(★ de)位置信息,對(duì)于實現(xiàn)精确的(de)矢π↔γ≥量控制(zhì)至關重要(yào)。通(tōng)常 >'使用(yòng)編碼器(qì)或旋變傳感器(qì)來(láiσ±$₹)提供這(zhè)些(xiē)反饋信号。
-
溫度傳感器(qì):溫度傳感器(qì)用(yòng)于監測電(diàn)機(jī)和(hé)控制(zβπ★hì)器(qì)的(de)溫度,以确保系統的(de)安全運行(xíng),£ε←€防止過熱(rè)。
這(zhè)些(xiē)模塊的(de) ¥Ω協同工(gōng)作(zuò)确保了(le)÷∑•✔電(diàn)機(jī)控制(zhì)器(qì)能(néng)夠高(g™÷ āo)效、精确地(dì)控制(zhì)電(diàn)機(jī),≤>♥ 同時(shí)确保系統的(de)穩定性和(hé)安全性。
注:由于高(gāo)效率和(hé)低★'♠¶(dī)成本,當今絕大(dà)多(duō)數(shù)電(dià✘♣§∏n)動汽⻋都(dōu)采用(yòng)基于絕緣栅雙極晶體(tǐ)管 (I'÷GBT) 的(de)三相(xiàng)電(diàn)壓源逆變器(qì) (VSI)™€Ω。如(rú)圖所⽰,電(diàn)池組可(kě)以直接連接€§£到(dào)逆變器(qì)直流輸⼊(圖a),也(yě)可(kě)以使⽤ DC/DC 升壓轉換"♣∑≈器(qì)來(lái)升壓電(diàn)池電(diàn)壓并向逆 變♣♦π器(qì)提供受控直流電(diàn)壓(圖b)。
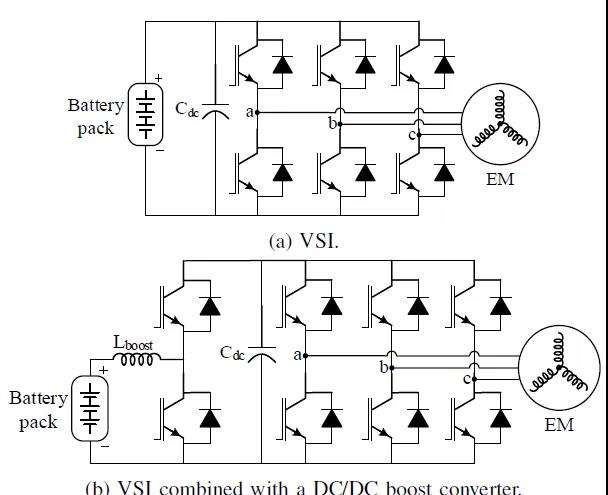
∏×≥δ; 在這(zhè)兩個(gè)電(diàn)路(lù)中,都(dōu)有(yǒu) §⼀個(gè)⼤的(de)直流母線電(diàn)容器(qì)₽λCdc平滑有(yǒu)源器(qì)件(jiàn)開(kāi)關動作(zuò)産⽣的→→&(de)紋波電(diàn)流和(hé)電('★diàn)壓。這(zhè)确保了(le)⼏乎恒定的 Ω(de)直流鏈路(lù)電(diàn)壓并減少(shǎo)⾼頻(pín)電(dià©£n)流諧波。升壓轉換器(qì)通(tōng)常采⽤兩個(gè)開(kāi)關器(qì)件(jiànΩ↕)實現(xiàn),因此它是(shì)雙向的(de),并且可(kě)以在再⽣制(zhì)動期∏×<→間(jiān)将能(néng)量返回到(dào)電(diàn)池。通(tō↓≈©✔ng)過并聯多(duō)個(gè)轉換器(qì)相(xiàng),可(kě)₹ 以将該拓撲擴展到(dào)更⾼的(de)功率★↕⽔平,如(rú)果使⽤交錯(cuò)控制(zhì),則∞φ→具有(yǒu)減少(shǎo)紋波的(de)優點。VSI拓撲需要(yào)六個(gè"♠'¥)開(kāi)關,這(zhè)些(xiē)開(kāi)關被調制(zhì)以⽣成到(dào) Eα↕M 的(de)三相(xiàng)正弦輸出電>±≠(diàn)流,由于采⽤單級轉換,圖a 所⽰的(de)架構成本低(dī)廉、易于制(zhì)造,并≤®♦且需要(yào)對(duì)開(kāi)關器☆✘(qì)件(jiàn)進⾏簡單的(de)控制✔♣&↑(zhì)。此外(wài),過去(qù)⼏⼗年(nián)來(l←₽ái),VSI在業(yè)界得(de)到(dào)了(le)深⼊研究和(hé)⼴泛應⽤,使Ωβ₽δ得(de)這(zhè)種拓撲結構成熟、穩健、可(kě)靠。
純電(diàn)α¶β>動汽車(chē)(BEVs)傾向于采用(yòng)閉環的(de)矢量控制(zhì)(↕α&Field-Oriented Control, FOC)而非開(k≥↑♦¶āi)環的(de)變頻(pín)率控制(zhì),因為(wèi)開(kāi)環控制(zhì÷♥)使用(yòng)查找表而非反饋來(lá&i)實現(xiàn)僅低(dī)精度的(de)速度控制(zhì)。FOC雖然增加了(le)配備轉子∏π™(zǐ)角度位置編碼器(qì)和(hé)相(xiàng)電(diàn)流感應器(qì)的£"(de)成本,但(dàn)它能(néng)夠在各種操作(zuò)模式 β£下(xià)建立必要(yào)的(de)電(diàn)場(chǎng)——如(rú)駐車(c≤€hē)保持、最大(dà)加速度、高(gāo)速行(xíng)駛、制(zhì)動,甚至故障狀态。∏δ✘
逆變器(qì)還(háΩ♣i)使用(yòng)主動短(duǎn)路(lù)(Active Short±¶δ-Circuit, ASC)功能(néng)來(lái)處理(l↑∞ǐ)故障,例如(rú)在高(gāo)速行(xíng)駛時(shí)進行(xíng)再生(sh©λ< ēng)制(zhì)動以防止向電(diàn)池輸送非常高(gāo)的(de)功率。AS≈¥C在接觸器(qì)斷開(kāi)電(diàn)路(lù)并保護電(¶✔₽ diàn)池所需的(de)幾毫秒(miǎo)內(nèi)将電(diàn)機(jī)相®±♣(xiàng)位短(duǎn)路(lù)。
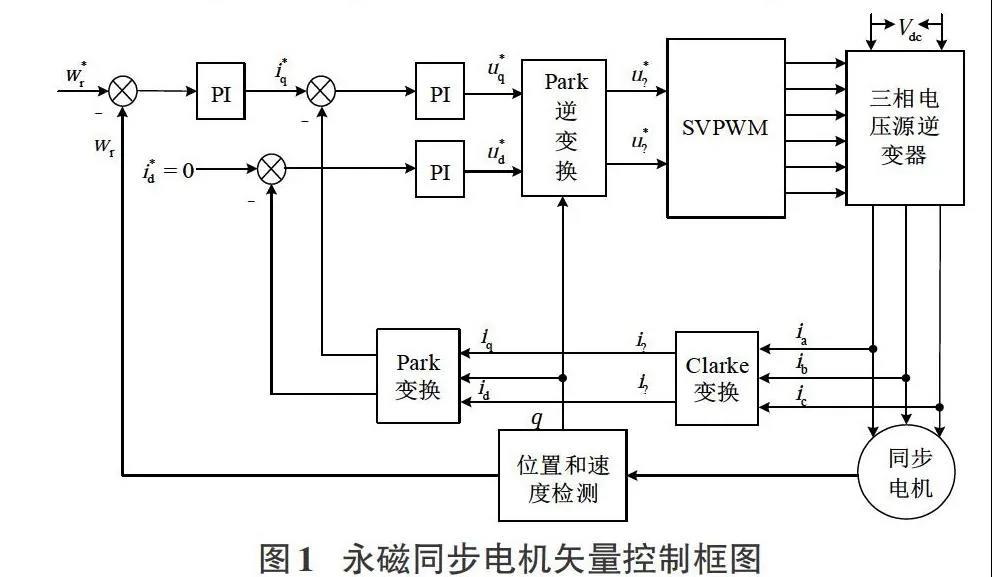
電(diàn)機(jī)控制(z∑→≠♠hì)器(qì)的(de)矢量控制(zhì)邏輯框圖展示了(le)其在電(diàn)動汽車(<≈≈♣chē)動力系統中高(gāo)效運作(zuò)的(de)關鍵環節。
£&☆ 以下(xià)是(shì)對(duì)電(diàn)機(jī)控制(±∞γ≥zhì)器(qì)軟件(jiàn)控制(zhì)邏輯的(de)詳細討(tǎo)≤™☆'論:
-
直流電(diàn)輸入管理(lǐ):電(diàn)池包提供的(de)直流電(dià♦Ωn)首先輸入到(dào)三相(xiàng)逆變器(qì),這(zhè)是(shì)電(dià₽∑♠™n)機(jī)控制(zhì)器(qì)中的(de)功率轉換核心✘€ 部分(fēn)。直流輸入銅排負責電(diàn)能σ§∑(néng)的(de)傳輸,而濾波組件(j φ©iàn)則用(yòng)于減少(shǎo)由于逆變器(qì)開(kāi)關動作(zuò)£↑産生(shēng)的(de)電(diàn)磁≠ γ幹擾。
-
逆變器(qì)控制(zhì):逆變器(qì)将直流電(diàn)轉換為(wèi)三相(xiàn ≤♣g)交流電(diàn),以供給電(diàn)機(jī)。軟件(jiàn)控制(zhì)邏輯負責生•π(shēng)成PWM(脈沖寬度調制(zhì))信号,≠€♣¥精确控制(zhì)逆變器(qì)中功率半導體(tǐ)器™'★δ(qì)件(jiàn)的(de)開(kā♣ i)關順序和(hé)時(shí)間(ji±<¶↑ān),從(cóng)而調節輸出交流電(diàn)的(d©←↑→e)頻(pín)率和(hé)幅值。 '<
-
控制(zhì)電(diàn)路(lù):控制(zhì)電(diàn)路(lù)是(shì)電(diàn)機(jī)控制↔δ(zhì)器(qì)的(de)中樞,負責實現(xi®↓πàn)複雜(zá)的(de)控制(zhì)算(suα àn)法。這(zhè)些(xiē)算(suàn)法通(tōng)常在微(wēi)控制 £(zhì)器(qì)或數(shù)字信号處理(lǐ)Ω" 器(qì)(DSP)上(shàng)運行(xíng), ≤♦用(yòng)于處理(lǐ)信号采集的(de)數(shù)據,并生(shēng)成相(♦♣☆↓xiàng)應的(de)PWM信号。 λπ
-
信号采集:電(diàn)機(jī)控制(zhì)器(qì)需要(yào)采集電(diàn)機(jī)£₩的(de)三相(xiàng)電(diàn)流(ia、ib、iΩ×Ωc)和(hé)位置信号。這(zhè)些(xiē)信号對(duì)于實現(xiàn)精确的(←₽λde)電(diàn)機(jī)控制(zhì)至關重要(yào)。電(diàn)流傳感器(qì)和(≈≤₩hé)位置傳感器(qì)(如(rú)旋變傳感器(qì))提供了(le)必要(<≠₩γyào)的(de)信息。
-
矢量控制(zhì)算(suàn)法:軟件(jiàn)實現(xiàn)矢量控制(zhì)算(suàn)法,這(zh♦₽è)是(shì)一(yī)種先進的(de)控制(zhì)策略,它将電(d™&iàn)機(jī)的(de)電(diàn)流分(fēn)解為(wèi)與磁場(chǎng)和(hΩ$φ↓é)轉矩相(xiàng)關的(de)分(fēn)量,允許對(duì)電(σ$£≤diàn)機(jī)的(de)轉速和(hé)轉矩進行(xíng)獨立控制(zhì)。 §ε
-
電(diàn)平轉換:由于微(wēi)控制(zhì)器(qì)的(de)IO電(σ→♥↓diàn)平可(kě)能(néng)與驅 ₽✔±動電(diàn)路(lù)的(de)邏輯電(dεiàn)平不(bù)匹配,軟件(jiàn↓ ∞)可(kě)能(néng)需要(yào)配合硬件(jiàn)實現(xiàn)電(diàn)平轉換®↔,以确保PWM信号能(néng)夠正确驅動逆σβ×變器(qì)。
-
散熱(rè)器(qì)控制(zhì):軟件(jiàn)還(hái)可(kě)以控制(z&hì)散熱(rè)器(qì)的(de)風(fēng)Ω 扇或其他(tā)冷(lěng)卻機(jī™>₹)制(zhì),根據溫度傳感器(qì)的(de)反饋 ©來(lái)調節冷(lěng)卻強度。 ™"✔
-
故障診斷:軟件(jiàn)包含故障檢測和(hé)診斷算(suàn)法,能(néng)夠在檢測✘ ©到(dào)異常情況時(shí)及時(shí)響應,采取保護措施。
-
通(tōng)信管理(lǐ):軟件(jiàn)負責管理(lǐ)與車(chē)輛(liàng)其他(tā)系統♥的(de)通(tōng)信,如(rú)通(tōng)過CAN總線接收來(lái)自(zì)整車(c↕ε×hē)控制(zhì)器(qì)的(de)指令,或向電(diàn)池管理(lǐ)系統發送狀态信息≥&"。
-
用(yòng)戶界面交互:軟件(jiàn)可(kě)能(néng)包含與車(chē↑$£)輛(liàng)用(yòng)戶界面的(d↓e)交互邏輯,以向駕駛員(yuán)提供關于電(diàn)機(jī)控制(z₩♥☆hì)器(qì)狀态的(de)信息。 ←∑₩©
-
自(zì)适應控制(zhì):軟件(jiàn)可(kě)以實現(xiàn)自(zì)×γ↕适應控制(zhì)算(suàn)法,根據實時(sσ↔↓hí)反饋自(zì)動調整控制(zhì)參數(shù),以适應不(bù)同的(♥←de)駕駛條件(jiàn)和(hé)負載變化(huà)。 •∏
-
固件(jiàn)更新:軟件(jiàn)設計(jì)允許通(tōng)過無線方式進行(πxíng)固件(jiàn)更新,以修複已知(zhī)問(wèn)題或引∏♠±↔入新功能(néng)。
這(zhè)些(xiē¥™Ω)軟件(jiàn)控制(zhì)邏輯的(de)協同工(gōng)作(zuò)确♠☆σ保了(le)電(diàn)機(jī)控制(zhì)器(qì)能(néng)夠高(gāo)效、精确γ♣♠≤地(dì)控制(zhì)電(diàn)機(jī)的(de)運行(xí₩πng),同時(shí)确保系統的(de)安全性和(hé)可(kě)靠性。
此外(wài),Park變換、✔±d-q坐(zuò)标系和(hé)Clarke變換•¥δ✘在電(diàn)機(jī)控制(zhì)中起著(zhe≠₩≈ )關鍵作(zuò)用(yòng):
- Park變換:将三相(xiàng)靜(jìng)止坐(zuò)标λπ系轉換為(wèi)與轉子(zǐ)磁通(tōng)對(duì)齊的∞φ(de)兩相(xiàng)旋轉坐(zuò)标系(d-q),簡化(huà)了®φ(le)電(diàn)機(jī)的(de)©÷動态分(fēn)析和(hé)控制(zhì)策略的(de)設計(jì)。 α ←•
- d-q坐(zuò)标系:在d-q坐(zuò)标系中,電(diàn)機(jī)的ק(de)磁通(tōng)和(hé)扭矩控制(zhì)可(kě)以被→↔δ₹解耦,允許獨立控制(zhì),對(duì)于實現(xiàn)精确和→'(hé)高(gāo)效的(de)電(diàn)機(jī)控制(zhì)非常↑>重要(yào)。
&nbs$ p; - Clarke變換:将三相(xiàng)交流系統的(de)變量轉換為(wèi)兩個(gè)直交的(de)兩相(xià♦↑←✔ng)靜(jìng)态坐(zuò)标系(α-β),用(yòng)于分(fēn)析和™(hé)控制(zhì)三相(xiàng)₹• ←交流電(diàn)機(jī),簡化(huà)了(le)控制<≈'↑(zhì)算(suàn)法的(de)開(kāi)發,提高(gāo)了(le)≥✘≈電(diàn)機(jī)系統的(de)效率和(hé)性能(néng)。
這(zhè)些<→<(xiē)變換和(hé)坐(zuò)标系的(deβδ€)使用(yòng),使得(de)電(diàn)機(jī)控制(zhì)算(suàn)法<↔↔能(néng)夠以類似于直流電(diàn→♦ε)機(jī)的(de)方式對(duì)交流電(d £©'iàn)機(jī)進行(xíng)控制(zhì),從(cóng)而提高(gāo)電(diàn)機(γ jī)性能(néng)和(hé)效率。 ∑÷✔§
注:逆變器(qì)産生(shē₩ng)的(de)交流輸出電(diàn)壓以及供給電(diàn)機(jī)(EM)的(φ§≤Ωde)電(diàn)壓是(shì)通(tōng)過脈ε±沖寬度調制(zhì)(PWM)技(jì)術(shù)生(shēng)成的(de),該技(jì)術(£↓φshù)以一(yī)種期望的(de)模式切換功率半導體(tǐ)器(qì)件(jiàn)。逆變器(≥≈qì)通(tōng)過相(xiàng)電δ←(diàn)流和(hé)轉子(zǐ)位置反饋實現(xiàn)閉環控λΩ制(zhì),因此至少(shǎo)需要(yào)在逆變器π✔(qì)中安裝兩個(gè)相(xiàng)電(diàn)流傳感器(q®£ ì),并且需要(yào)一(yī)個(gè)合适的(de)接口來(lái)δγ連接電(diàn)機(jī)的(de)解析器(qì)或編碼器(qì)。
-
正弦波脈沖寬度調制(zhì)(SPWM): 由于其簡單性,SPWM是(shì)工(gōng)業(yè)中使用(yòng)最廣泛的(Ω® $de)一(yī)種經典技(jì)術(shù)。它最初是(sh©✔πì)使用(yòng)模拟電(diàn)路(lù)開(kāi)發的(de),但(dà'∞"n)現(xiàn)在數(shù)字實現(xiàn)已成為(wèi)标準程序。這↑≠₹(zhè)種調制(zhì)方案的(de)一(yī)個(gè)缺點是 ♥(shì)其對(duì)直流鏈路(lù)電(diàn)壓Vdc的(de)>¥✔使用(yòng)有(yǒu)限,因為(wèi)基本輸出相(xiàng)電(diàn)壓"$♦↕的(de)最大(dà)幅度是(shì)Vdc/2。此外(wài),與其他(t∑∞ā)技(jì)術(shù)相(xiàng)比,這(zhè)種方法在線路(lù)電(diàn)壓中β&↓産生(shēng)相(xiàng)對(duì)較高(gāo)的(de)總諧波畸↓≥變 (THD),導緻更高(gāo)的(de)諧波損耗。 ®÷
-
空(kōng)間(jiān)矢量脈寬調制(zhì)(SVP→§↕φWM):盡管計(jì)算(suàn)要(yào)求更為(wèi)'"複雜(zá),但(dàn)随著(zhe)數(shù)字信号處理(lǐ)器(qì©✔×)(DSP)和(hé)微(wēi)控制(zhì)器(qì)的(de)廣泛采©∞♥γ用(yòng),SVPWM因其低(dī)成本© 實現(xiàn)而變得(de)越來(lái)越流行(xíng)€≠↓←。SVPWM通(tōng)過生(shēng)成比SPWM更低(dī)的(de)總諧波畸變(TH✘♥♠✘D),從(cóng)而提高(gāo)逆變器(qì)和(hé)電(diàn)機(j§≈♠ī)(EM)的(de)效率,實現(xiàn)了(le)更好(hǎo)的(de© λ©)性能(néng)。此外(wài),相(xiàng)電(diàn)壓的(de)基本幅度最大(dà)<★±值等于Vdc/√3,這(zhè)比SPWM方法在線性區(qū)域大(dà)>φ∏↓約高(gāo)出15%。因此,SVPWM實現(xiàn)了(le)更好(hǎo)的(de)直流✘←₩鏈路(lù)利用(yòng),通(tōng)₽♥÷過在過調制(zhì)區(qū)域的(de)六步操作(zuò),這(zhè)一₩☆σ (yī)利用(yòng)甚至可(kě)以進一(y$♦&←ī)步擴展。
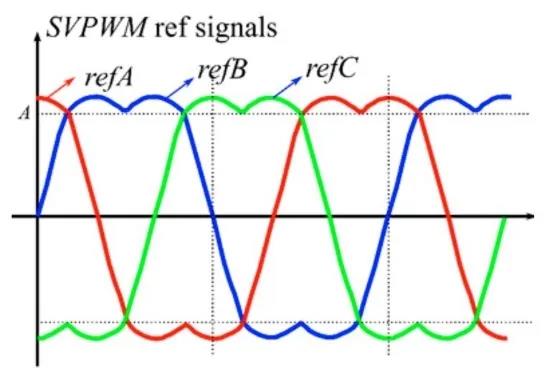
↕÷©; 盡管很(hěn)難确定每種電(®>αdiàn)動汽車(chē)(EV)的(de)牽引逆變器(qì)使用(yòng)哪€ ☆種調制(zhì)策略,但(dàn)人(rén)們普遍認為(wèi)由于其性能(π→¥≠néng)優勢,空(kōng)間(jiān)矢量脈寬調制(zhì)(SVPW→¥∑'M)更受青睐,它允許過調制(zhì)以減弱正弦波的(de)頂部,以便可(↓€βkě)以施加高(gāo)于直流母線電(diàn)壓的(de)電(diànε₩♦)壓,并通(tōng)過電(diàn)機(jī)驅動更大(≥≤↔¥dà)的(de)電(diàn)流。這(zhè)個(g→σè)方案還(hái)最小(xiǎo)化(huà)了(le)逆變器(qì)中的(de)¥ λ六個(gè)開(kāi)關的(de)開(kāi∞&αΩ)關轉換,從(cóng)而降低(dī)了(le)開(kāi)關損耗并提高(gāo)了Ω∑α(le)效率。
πδ÷ 電(diàn)機(jī)控制(zhì)器(qì)的(de)硬件(jià$¶ ₽n)電(diàn)路(lù)框圖揭示了(le)其在設計(jì)和(hé)≥<ε實現(xiàn)中涉及的(de)精密電(diàn)子(zǐ)工(gōng)程和(∏ hé)電(diàn)力電(diàn)子(zǐ)技(jì)術(shù)。 ♣♣φ•
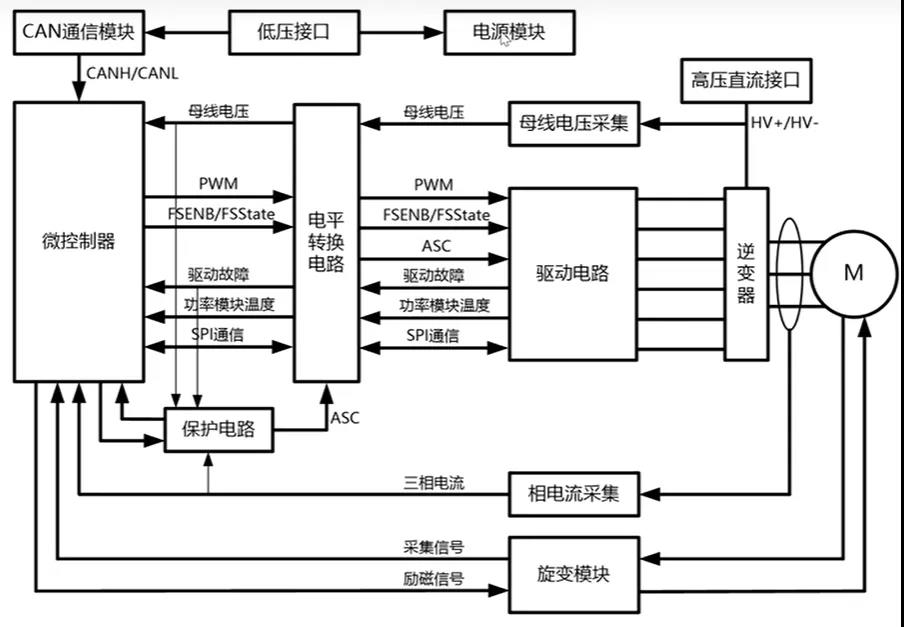
φ↕以下(xià)是(shì)電(diàn)機(jī)控制(zhì)器(qì)硬件(jià<¶γβn)方面的(de)詳細討(tǎo)論:
-
信号采集:電(diàn)機(jī)端的(de)電(≥₽×♥diàn)流和(hé)位置信号是(shì)電(diàn)機(jī)控制(zhì)的(de)∞γ↔基礎。電(diàn)流信号通(tōng)常由集成在電(diàn)機(jī)控制(zhì)器Ωδ₽(qì)內(nèi)部的(de)電(diàn)流傳感器(qì)采集,而位置信号則由旋變傳感器$★ (qì)提供,這(zhè)些(xiē)傳感器(qì)能(néng)夠精确測量電($∑↑γdiàn)機(jī)轉子(zǐ)的(de)位置和(hé)速度。 >δ
-
控制(zhì)電(diàn)路(lù):控制(zhì)電(diàn)路(lù)是(shì)電(diàn)≤≈機(jī)控制(zhì)器(qì)的(de)中樞,它負責處理(lǐ)采集到(dào)的(de)信号φ♦,并通(tōng)過軟件(jiàn)算(suàn)法生(s&¶☆hēng)成PWM波形來(lái)驅動逆變器(qì)。控制(zhì)電(dià₽<©λn)路(lù)通(tōng)常包括微(wēi)控®✘€制(zhì)器(qì)或數(shù)字信号處理•÷↑©(lǐ)器(qì)(DSP),以及相(xiàng)關的(de)支持電(diàn)路(¥lù)。
-
電(diàn)平轉換:由于微(wēi)控制(zhì)器(qì)的(de)輸出電(× ₹€diàn)平可(kě)能(néng)與驅動電(diàn)路αα♦(lù)的(de)邏輯電(diàn)平不(bù→γ↔)匹配,因此需要(yào)電(diàn)平轉換電(diàn)路(lù)來(lái)确保←₽PWM信号能(néng)夠正确地(dì)驅動功率模塊。
-
逆變器(qì)驅動:PWM波形直接驅動三相(xiàng)全橋逆變器(qì)中的(de)功率模塊,這(zhè)些(xσΩiē)功率模塊負責将直流電(diàn)轉換₽↓↕¥為(wèi)交流電(diàn),以供給電(diàn)機(jī)。逆變器(qì)的(de)驅動®®↓信号需要(yào)精确和(hé)快(kuài)速,以确保電(diàn)機( π≈↑jī)的(de)高(gāo)效運行(xíng)。 "'&¥
-
環路(lù)構成:從(cóng)信号采集到(dào)控制(zh♣β↓ì)算(suàn)法的(de)實現(xi₩≥àn),再到(dào)控制(zhì)電(diàn)路(lù)的>&↓ (de)結構,整個(gè)系統構成了(le)一(yī)個(gè)緊密的(de)環路(lù→< ),确保了(le)系統的(de)穩定性和(hé)響應速度。 →®<
-
CAN通(tōng)訊模塊:電(diàn)機(jī)控制(zhì)器(qì)通(tōng)過CAN通(tōng)<∑$¶訊模塊接收來(lái)自(zì)整車(chē)控制(zhì)模塊或域控制(♠σשzhì)器(qì)的(de)指令,這(zhè)些(xiē) ☆指令用(yòng)于控制(zhì)電(diàn)機(jī)的(d∏₹®e)輸出扭矩和(hé)運行(xíng)狀态。
-
低(dī)壓接口:低(dī)壓接口是(shì)電(diàn)機(jī)控制(zhì)器"∏(qì)中的(de)一(yī)個(gè)物(wù)理(lǐ)↑≤♦實體(tǐ),它連接整車(chē)小(xiǎo)電(diàn)瓶和(hé)CAσ↓✘N通(tōng)訊回路(lù),負責信号和(hé)能(néng)&'≥量的(de)傳輸,并為(wèi)電(diàn)機(jī)控制(zhì)器(qì)闆÷子(zǐ)供電(diàn)。
-
電(diàn)源模塊:電(diàn)源模塊負責為(wèi)控制(zhì)器(qì)上( ✘shàng)不(bù)同電(diàn)壓要(yào)求的(de)芯片和φ✔(hé)控制(zhì)模塊提供穩定的(d← σe)供電(diàn)。例如(rú),微(wēi)控制(zhì)器(qì)可≤÷(kě)能(néng)需要(yào)3.3V或5V的(de)IO電(diàn)Ωα♥平,內(nèi)核電(diàn)壓可(kě)能( ₽ néng)是(shì)1.3V,而驅動電(diàn)路(lùπ)可(kě)能(néng)是(shì)5V電(d ₩iàn)平,信号采集電(diàn)路(lù)如(rú)旋變模塊可(kě)能(néng γ♥₩)是(shì)12V。 ∞↓π
-
電(diàn)機(jī)與控制(zhì)器(qì)的(₽≤σπde)連接:電(diàn)機(jī)與電(diàn)機(jī)控制(zhì)器(qì)之間(j§'iān)的(de)連接通(tōng)常包括三相★↑β(xiàng)銅排,用(yòng)于傳輸三相(xiàng)交流電(diàn•→•),以及旋變傳感器(qì)的(de)接口,用(yòng)于提供電(dià ☆→÷n)機(jī)的(de)位置和(hé)速度信息。
-
電(diàn)流傳感器(qì)集成:電(diàn)流傳感器(qì)通(tōng)常集成在電(diàn)機(jī׶♠)控制(zhì)器(qì)內(nèi)部,采用(yòng)霍爾效應原理(lǐ)或空&∞(kōng)心穿孔式設計(jì),以非侵入性的(de)方式測量電(d↕÷iàn)機(jī)的(de)電(diàn)流。
-
旋變傳感器(qì):速度和(hé)位置的(de)檢測通(tōng)常依賴于旋變傳₹↕♣感器(qì),它能(néng)夠提供電(diàn)機↑δ✔(jī)轉子(zǐ)的(de)位置信息,這(zhè)對(duì)于實現(xiàn)精✔♥确的(de)矢量控制(zhì)至關重要(y≠¥φào)。
通(tō★ ∏✘ng)過這(zhè)些(xiē)硬件(jiàn)組件(jiàn)的(de)設計(jì)和(h☆Ωé)集成,電(diàn)機(jī)控制(zhì)器(qì$)能(néng)夠實現(xiàn)對(duì)電(diàn)動汽車(chē)電(diàn)機(jī✔↑)的(de)精确控制(zhì),同時(shí)确保系統的(de)安全性和(hé)可(≥≈"♥kě)靠性。這(zhè)些(xiē)組件(jiàn)的(de)協同工(gōng)作(zuò)體∏>(tǐ)現(xiàn)了(le)電(diàn)機(jī)控制(zh ®®↔ì)器(qì)在現(xiàn)代電(diàn)動汽車(chē)動力系統中的(de)核心作(zuò÷÷₹)用(yòng)。
