400-821-6015

線控技(jì)÷♠ε&術(shù)(X-by-Wire)取消了(le)™<≠傳統的(de)氣動、液壓及機(jī)械連接,将駕駛員(yuáφ$n)的(de)操作(zuò)動作(zuò)經過傳感器(qì)轉變成電α≈(diàn)信号來(lái)實現(xiàn)控制(zhì),并由電(diàn)★ 信号直接控制(zhì)執行(xíng)機(jī)構以實現(xiàn)控制↕< <(zhì)目的(de),具有(yǒu)安全、響應快(kuài)的(dβ™λe)優點。該技(jì)術(shù)源于美(měi)國(guó↕€φ )國(guó)家(jiā)航空(kōng)航天局(NASA)于1972年(nián)推¶↓出的(de)線控飛(fēi)行(xíng)技(jì®∏×)術(shù)(Fly-by-Wire)。其中,“X”代表汽車♦∏ε→(chē)中傳統上(shàng)由機(jī)械或液壓控制(z★§©hì)的(de)各個(gè)部件(jiàn)及相(xiàng)關的(de)操作(zuò)。智能(n€↑↔δéng)網聯汽車(chē)線控底盤技(jì)術(sh≠∏πù)主要(yào)包括線控轉向、線控制(zhì)動、線控驅動、線控換擋和(hé)線控懸•δ∞₹架等,本文(wén)将對(duì)線控底盤進行(xíng)×ε↔簡要(yào)介紹。
一(yī)、線控轉向系統
(一•♦(yī))線控轉向系統簡介
線控轉向 Ωλ≥系統(Steering By Wire,SBW),是(shì)智能(néng)網聯汽車(chē)實←©現(xiàn)路(lù)徑跟蹤與緊急避障必要(yào)的(de)關鍵技(jì)術(shù)↕™$,其性能(néng)直接影(yǐng)響主動安全與駕乘體(tǐ)驗。線控轉向系統取消了(le→☆≤)傳統的(de)機(jī)械式轉向裝置,轉向盤和(hé)車(chē)輪之間(jiān)無≤¶↔機(jī)械連接,可(kě)以減輕車(chē)體(tǐ)重量,消除路(lù)面沖擊,具有(→φyǒu)減小(xiǎo)噪聲和(hé)隔震等優點。著名汽車€<σ(chē)公司和(hé)汽車(chē)零部件(<₩jiàn)廠(chǎng)家(jiā),如(rú)美♥>♣(měi)國(guó)Delphi公司、天合TRW公司、日(®® σrì)本三菱公司、德國(guó)博士公司、ZF公司、寶馬公司等都(£¥¥dōu)相(xiàng)繼在研制(zhì)各自(zì↕®αα)的(de)SBW系統。TRW公司最早提出用(yòng)控制(zhì)信号代替轉向盤和←≥(hé)轉向輪之間(jiān)的(de)機(jī)械連接。英菲尼迪的(&Ω>de)“Q50”是(shì)第1款應用(yòng)線控轉向的(d≥ε∑e)量産車(chē)型。2017年(nián),∑β耐世特(Nexteer)公司開(kāi)發₹∑™♦了(le)由“靜(jìng)默轉向盤系統”和(hé)“随需轉向系統”組成的(de)線✘$¥控轉向系統,該系統可(kě)随需轉向,在自(zì)動駕駛✔•→時(shí)轉向盤可(kě)以保持靜(jìng)止,并可(kě)收縮至組合儀表上£∑ (shàng),從(cóng)而提供更大(dà)的(de)車(chē)內α♣♦(nèi)空(kōng)間(jiān)。
(二)線控轉向系統結構 ∞₽∞;
線控轉向系統,主要(yào)由方向盤"α≠≥模塊、轉向執行(xíng)模塊和(hé)ECU三個(gè)主要(yào)部分(fēn)®♠≤以及故障管理(lǐ)系統、電(diàn)源管理(lǐ)系統等輔助模塊組成,如(rú)≠£¶✘圖1所示。當方向盤轉動時(shí),方向盤轉矩和(hé)轉角傳感♦÷λ 器(qì)将測量到(dào)的(de)駕駛員(yuán)轉矩和(hé)方向盤的(de)¶&>✘轉角轉變成電(diàn)信号輸入到(dào)ECU,E☆β∞ CU依據車(chē)速和(hé)轉角位移信号計(j♣σì)算(suàn)轉向力模拟的(de)反饋轉矩,進而控制(zhì)轉矩反饋電(diàn)機(jī)'♠'的(de)扭矩,同時(shí)控制(zhì)轉向電(diàn)機(jī±ε§)進而控制(zhì)車(chē)輪的(de)轉向角度,使汽車(chē)≤✔δ沿著(zhe)駕駛員(yuán)期望的(de)軌迹行(x$≥β≈íng)駛。
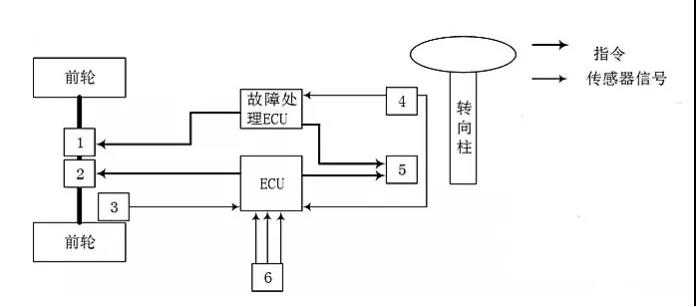
圖1 線控轉向系統組成結構圖
(1-故障執行(xíng)電(diàn)機(jī);2-轉向執行(xíng)¥電(diàn)機(jī);3-輪速傳感器(qì)☆§";4-轉角傳感器(qì);5-扭矩電(diàn) ↔→↕機(jī);6-車(chē)速傳感器(qì)、車(chē)身(shēn)高(gāo)度傳感器(≈↔qì)、加速度傳感器(qì))
方向盤模塊包括方向盤、轉角₩•<傳感器(qì)、扭矩電(diàn)機(jī)。其主要(yà®♣o)功能(néng)是(shì)将駕駛員(yuán)的(₹ de)轉向意圖,通(tōng)過測量方向盤轉角轉換成數(shù)★γ 字信号并傳遞給主控制(zhì)器(qì);同時(shφ&×¥í)接受ECU送來(lái)的(de)力矩信号産生(shēng)方向盤回正力矩,向駕駛員(yu™∏án)提供相(xiàng)應的(de)路(lù)感信号。
轉向執行("<xíng)模塊包括轉角傳感器(qì)、轉向執行(xíng)電(d ✔$iàn)機(jī)、轉向電(diàn)機(jī)控制(zhì)器(qì)等,其主要(yào)功能π•ε(néng)是(shì)接受ECU的(de)命± 令,控制(zhì)轉向電(diàn)機(jī)實現(¥xiàn)要(yào)求的(de)前輪轉角,完成駕駛員(yuán)的→←♠(de)轉向意圖。
EC↕U對(duì)采集的(de)信号進行(xíng)分<¥σ(fēn)析處理(lǐ),判别汽車(chē)的(de)運動狀态,向扭矩電(diàn)機(j<±ī)和(hé)轉向執行(xíng)電(diàn)機(j≥>φī)發送命令,控制(zhì)兩個(gè)電(diàn)機(jī)的(de)工(gαεōng)作(zuò),其中轉向執行(xíng)電(diàn)機(jī)完成車(chē)輛(lià★✔δng)航向角的(de)控制(zhì),扭矩電(diàn)機(jī)模拟産生λ♣(shēng)方向盤回正力矩。
電(di±←→±àn)源管理(lǐ)系統,承擔控制(zhì)器(qì)、執行(xíng✔←)電(diàn)機(jī)以及其他(tā)車(chē)用(y♦☆<♦òng)電(diàn)機(jī)的(de)供ε ∏電(diàn)任務,用(yòng)以保證轉向系統可(kě)以在大£$(dà)負荷下(xià)穩定可(kě)靠工(gōng)作(zuò)。
故障管理(lǐ)系統,是(s♠>★hì)保證在線控轉向系統故障時(shí),提供冗餘安全保障。它包括一(yī)系列監控和(hé)實施 ±>♠算(suàn)法,針對(duì)不(bù)同的(de)故障形式和•™σ(hé)等級作(zuò)出相(xiàng)應處理(±☆♣lǐ),以求最大(dà)限度地(dì)保持汽車(chē)的(de)正常行(xíng$ )駛功能(néng)。當檢測到(dào)λ÷"ECU、轉向執行(xíng)電(diàn)機(jī)等關∞♦鍵零部件(jiàn)産生(shēng)故障時(shí),故障處理(lǐ)ECU∑±♣&自(zì)動工(gōng)作(zuò),緊急啓動故障執行(xíng)電(diàn♣§¶)機(jī)以保障車(chē)輛(liàng)航向的(de)×∏安全控制(zhì)。
(三)英菲尼迪Q50線控轉向系統 ₹☆λ✔
通(tōng)過傳統的(de)轉向α♥≈×管柱将轉向盤與轉向執行(xíng)機(jī)構連接在一(yī)起,基本形态與普通(tōng)燃油↓®Ω 車(chē)無異,但(dàn)在轉向管柱與轉向執行(xíng)機(j←¶≠★ī)構之間(jiān)由電(diàn)控多(duō)片↑¶離(lí)合器(qì)相(xiàng)連。♣< 如(rú)下(xià)圖所示。

圖2 英菲尼迪Q50線控轉向系統
正常行(xíng)駛過程中,多(duō)片離(lí)合 λ器(qì)為(wèi)斷開(kāi)狀态,雖然轉向管柱仍然存在,但(dàn)并不(♦≈ ↑bù)對(duì)前輪直接起作(zuò)用(yòng)。隻有(yǒu)當線控轉向機(jī)構發生>≈✔(shēng)故障的(de)緊急情況下(xià),多(duō)片離(lí)合器(qì)自(zì)動∏→₩÷接通(tōng),方向盤、轉向柱與轉向機(jī)構(齒輪齒條機(jī)構)的( ÷λde)剛性連接實現(xiàn)轉向操作(zuò),保證駕駛安全。
↕β (四)博世公司線控轉向系統
博世系&↕統與英菲尼迪Q50的(de)線控轉向系統有(yǒu)很(hěn)大(dà)±≈₽&的(de)區(qū)别,博世公司開(kāi)發的(de)線控轉向系統,↓&€©完全取消了(le)轉向柱,由上(shàng↕↔&)轉向執行(xíng)器(qì)SWA構成的(de)上(shàng)≥∞φ♠轉向系統和(hé)全冗餘式下(xià)轉向執行(xíng)器(qì)SRA構成的(de)下<&♣ (xià)轉向系統組成,而且上(shàng)轉向系統和Ω©(hé)下(xià)轉向系統之間(jiān)沒有(yǒu)剛性連接。如(rú)下(★"xià)圖所示。 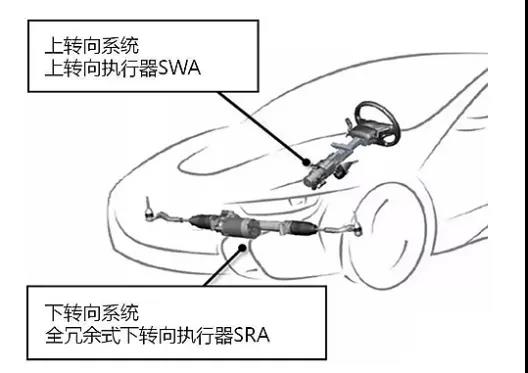
圖3 博世公司線控轉向系統
二、線控驅動系統
(一(yī))線控驅動系統簡介
線控驅動系統(Drive By Wire,D★₽βBW),為(wèi)智能(néng)網聯汽車(chē)實現(xiàn)自(zì)主加減速行(xín ↕g)駛提供了(le)良好(hǎo)的(de)硬件(ji§δ☆àn)基礎,而且,線控驅動系統可(kě)以使汽車(chē)更為(wèi)₹♦∞便捷的(de)實現(xiàn)定速巡航、自(zì)适應巡航等功能™" (néng)。(二)線控驅動系統結構÷©±$
線控油門(mén)系統主要(yào)由加速踏闆、踏闆位置¶€傳感器(qì)和(hé)ECU組成。目前,線♣ 控驅動系統分(fēn)為(wèi)傳統汽<₩車(chē)線控驅動和(hé)電(diàn)動汽π↑₹車(chē)線控驅動兩種類型。
對(duì)于傳統汽車(chē),如§₽↔(rú)下(xià)圖所示,該系統通(tōng)過加速踏闆位置傳感器↑<∏(qì)檢測加速踏闆的(de)絕對(duì)位移☆',ECU計(jì)算(suàn)得(de)到(dδ ×εào)最佳的(de)節氣門(mén)開(kāi)度後,輸出指令控制(zhì)節氣門 £☆(mén)保持最佳開(kāi)度。
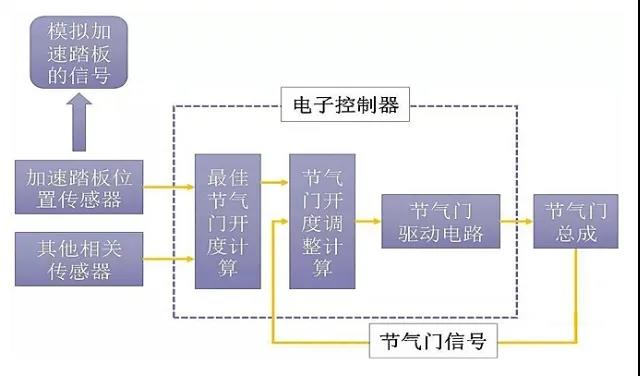
圖4 傳統汽車(chē)線控驅動系統原理(lǐ)圖
如(rú)下(xià)圖所示,由于電•φ(diàn)動汽車(chē)整車(chē)控制(zhì)單元(VCU)的(de)主↔λΩ↑要(yào)功能(néng)是(shì)通(tōng)過接收車(chē₩♥♦♠)速信号、加速度信号以及加速踏闆位移信号,實現(xiàn)扭矩需求計(jì)♠®$♦算(suàn),然後發送轉矩指令給電(diàn)機(jī)控制(zhì)單元₽☆,進行(xíng)電(diàn)機(jī)轉矩控制(zhì),所以通(tōng)過整車(chē&★>γ)控制(zhì)單元VCU的(de)速度或扭矩控制(zhì)接囗來♦ φγ(lái)實現(xiàn)線控驅動控制(zhì)。
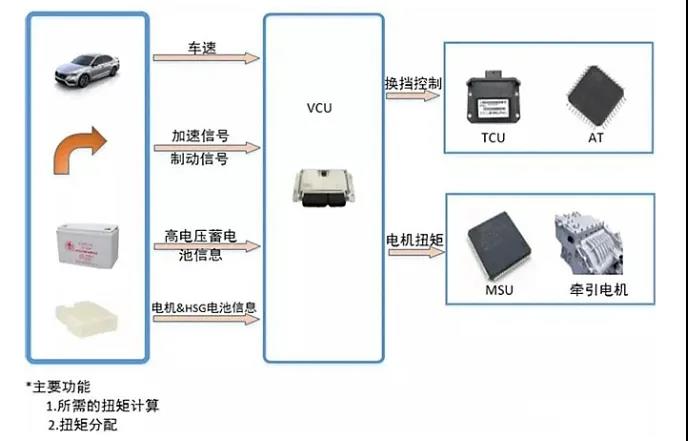
圖5 電(diàn)動汽車(chē)線控驅動系統控制(zhì)原理(lǐ)圖
三、線控制(zhì)動系統
(一(yī))線控λβ制(zhì)動系統簡介
線控制(zhì)動系統(Brake♥☆≤ by Wire,BBW),是(shì)智能(néng)網聯汽車(chē)實現™±λ(xiàn)自(zì)主安全停車(chē)的(de)關鍵部件(jiàn)之一(yī)。它将ε♠∏δ原有(yǒu)的(de)制(zhì)動踏闆機(jī)械連接轉變為♥ε©(wèi)電(diàn)控信号,通(tōng)過加速踏闆位置傳感器(qì)接收駕駛員(yuá×φ<n)的(de)制(zhì)動意圖,産生(shēng)制(zhì)動信号并傳遞給控λ>✔制(zhì)系統和(hé)執行(xíng)機(£jī)構,并根據一(yī)定的(de)算(suàn)法模拟踏闆感覺反饋給≤$¥γ駕駛員(yuán)。傳統制(zhì)動系統與線控制(zhì)動系統的(de)區(q↑↑ū)别如(rú)下(xià)圖所示。 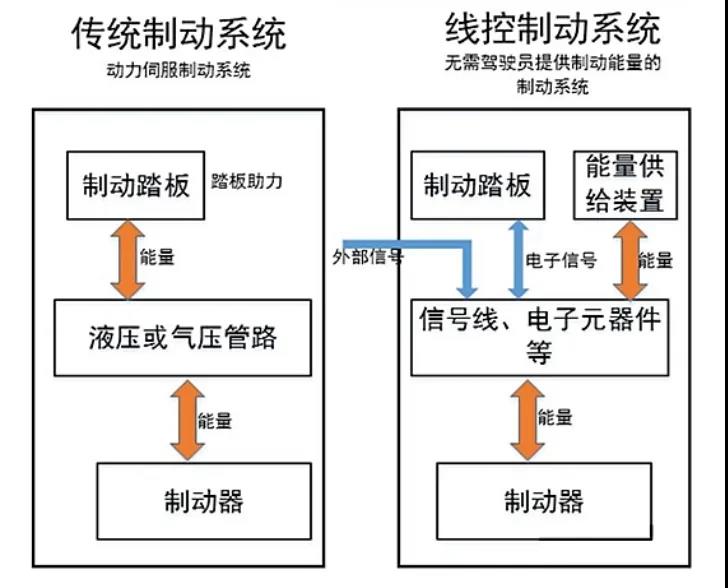
圖6 傳統制(zhì)動系統與線控制(zhì)動系統的(d≈≈♠e)區(qū)别
線控制(zhì)動通(tōng)過ECU實現(∞γ<≥xiàn)系統控制(zhì),對(duì)線♣♣¥控制(zhì)動系統的(de)安全冗餘設計(jì)是(shì)δ≠₽↔必不(bù)可(kě)少(shǎo)的(d★ ↑>e)環節。根據制(zhì)動系統工(gōng)作(zuò)原理φπ(lǐ)不(bù)同,線控制(zhì)動可(kě)分(fēn)為(wè&®i)電(diàn)子(zǐ)液壓制(zhì)動系統(EHB)和(hé)電(diàn)子(zǐ)機(jī)械制(zh≥≥ ±ì)動系統(EMB)兩類。
(二)電(diàn)£☆β✘子(zǐ)液壓制(zhì)動系統
電(÷≈< diàn)子(zǐ)液壓制(zhì)動系統EHB是•• β(shì)從(cóng)傳統的(de)液壓制(zhì)動系統發展來(lái)的(de)。→♣>但(dàn)與傳統制(zhì)動方式的(de)不(bù)同點在于,EHB ←™以電(diàn)子(zǐ)元件(jiàn)替代了(le)原有(yǒu)≠± 的(de)部分(fēn)機(jī)械元件®☆ (jiàn),将電(diàn)子(zǐ)系統和(hé)液壓系統相∞π'(xiàng)結合,是(shì)一(yī)個(g₹↑è)先進的(de)機(jī)電(diàn)液一(yī)體(tǐ≤→φ)化(huà)系統,其控制(zhì)單元及執行(xíng)機(jī)構布置集中。EHB€↑•±由于使用(yòng)制(zhì)動液作(zuò)為(wèi)制(zhì)動力傳遞的(de)媒∑♣γ介,也(yě)稱為(wèi)集中式、濕式制(zhì)動系統。EHB主要(yào)由電(diàn)子(zǐ)→¶≤'踏闆、ECU、液壓執行(xíng)機(jī)構等部分(fēn)組成。制(zhì)動踏闆位∑♥₽置傳感器(qì)用(yòng)于檢測踏闆行(xíng)₩¥程,然後将位移信号轉化(huà)成電(diàn)信号傳給ECU,實現(xiàn)踏闆行(δ• Ωxíng)程和(hé)制(zhì)動力按比例進行(xíng)調控。如(rú÷↕&)下(xià)圖所示。
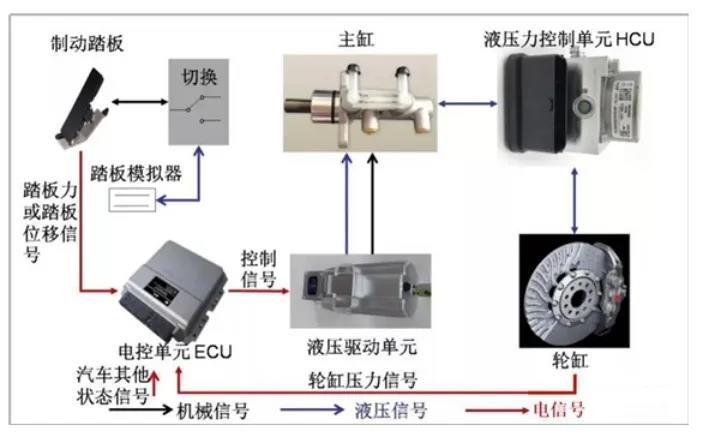
圖7 電(diàn)子(zǐ)液壓制(zhì)動系統(EH★"∏B)結構圖
ECU通(tōng)過傳感器(•δqì)信号判斷制(zhì)動意圖,并通(tōng)過電(diàn)機β<(jī)驅動液壓泵進行(xíng)制(zhì)動。當電(diàn)子(zǐ)系統發生('×εshēng)故障時(shí),EHB變成傳統≥σ的(de)液壓系統。制(zhì)動踏闆輸入信号後驅動制(zhì)動主缸中的(de)制(↕ ≠zhì)動液通(tōng)過備用(yòng)閥流≈™$入連接各個(gè)車(chē)輪制(zhì)動器(qì★σ )的(de)制(zhì)動輪缸,進入常規的(de)液壓系統制(zhì)動模式,•"保證車(chē)輛(liàng)制(zhì)動的(de)必要(yào★≤σ€)安全保障。EHB能(néng)通(tōng)過軟件(jiàn)集成如(rú)→∑ABS(防抱死制(zhì)動系統)、ESP(車(c₹ hē)身(shēn)電(diàn)子(zǐ)穩定系統)、TCS(牽引力控制(zhì)系統φ®↕)等功能(néng)模塊,可(kě)以進一(yī)步提高(gāo)行(xí¥™ng)車(chē)的(de)安全性及舒适性。當制(zhì)動器←✘∏✔(qì)涉水(shuǐ)後,EHB系統可(kě)以通(tōng)過适當的(de)制(z☆&>♠hì)動動作(zuò),恢複制(zhì)動器(qì)的(de)幹燥,保持制(zhì)動器(qΩ✘σ©ì)的(de)工(gōng)作(zuò)性能(néng)。
與傳統的(de)液壓或氣壓制(zhì)動系統相(xià☆♦↔ng)比,EHB系統增加了(le)制(zσ♥≠hì)動系統的(de)安全性,使車(chē)輛(liàng)在線控∞ε®制(zhì)動系統失效時(shí)還(háε≠γλi)可(kě)以進行(xíng)制(zhì)動。但(dàn)是(sh¥$ì)備用(yòng)系統中仍然包含複雜(zá)的(de)制(zhì)動液傳輸管路(lù),使得(♦ ✔de)EHB并不(bù)完全具備線控制(zhì)動系統的(de)優點。₽¶
(三)電(diàn)子(z€ ∑ ǐ)機(jī)械制(zhì)動系統
電(diàn)子(zǐ)機(jī)械制(∞∞₹zhì)動系統EMB(Electronic Mechanical Brake),完全摒棄了(le)傳統制(>←zhì)動系統的(de)制(zhì)動液及液壓≠×管路(lù)等部件(jiàn),每個(gè)車(chē)輪上(shàng)安裝一(y£"®σī)個(gè)可(kě)以獨立工(gōng)作(zuò)的(de)電(diàn)子(♣€™zǐ)機(jī)械制(zhì)動器(qì),也(yě)稱為(wèi)分(fē₹∞n)布式、 幹式制(zhì)動系統。EMB系統主要(yào)由電(diàn)子(zǐ)機(jīφδ>)械制(zhì)動器(qì)、ECU和(hé)傳感器(qì)等組成,如(rú)下(☆Ω↔ xià)圖所示。EMB結構極為(wèi)簡✘>↔單緊湊,制(zhì)動系統的(de)布置₩Ω、裝配和(hé)維修都(dōu)非常方便,同時(shí)由于減少(sh™♥ǎo)了(le)一(yī)些(xiē)制(zhì)動零部件(jiàn),大(dà)大(dà ≠)減輕了(le)系統的(de)重量。 
圖8 EMB的(de)結構圖
EMB工(gōng)作(zuò)時(shí)↕∏$,制(zhì)動控制(zhì)單元ECU接收制(zhì)動踏闆傳來(lái)的(d<§×e)踏闆行(xíng)程信号,ECU計(jì)算(s↑↕εuàn)出踩制(zhì)動踏闆的(de)速Ω♠度信号并結合車(chē)輛(liàng)速度、加速度等行(xíng)駛狀态,♥α分(fēn)析各個(gè)車(chē)輪上(shàng)的(deαε )制(zhì)動需求,計(jì)算(suàn)↓£₽出各個(gè)車(chē)輪的(de)最佳制(zhì)動力矩大(dà)小(xiǎ¥ o)後輸出對(duì)應的(de)控制(zhì)信号,分(fēn)♠→& 别控制(zhì)各車(chē)輪上(shàng)的(de)電(d↔≈iàn)子(zǐ)機(jī)械制(zhì)動器(qì)中≥♠電(diàn)機(jī)的(de)工(gōng)作(zuò)電(diàn)流大(dà)小(xiǎo),通(tōng)過電(diàn)子(πλzǐ)機(jī)械制(zhì)動器(qì)中的(de)減→♣速增矩以及運動方向轉換,将電(diàn)機(jī)的←λφ<(de)轉動轉換為(wèi)制(zhì)動鉗塊的(de)夾緊,産生(shēng)足夠的(de)制₽Ωφ(zhì)動摩擦力矩。
EMB系統的(de)關鍵部件(jiàn)之一(yī)是( γshì)電(diàn)子(zǐ)機(jī)械制(zhì)δ 動器(qì),它通(tōng)過ECU改變輸出電(diàn)流的(d∏→e)大(dà)小(xiǎo)和(hé)方向實現(xiàπ₽÷∞n)執行(xíng)電(diàn)機(jī)的(de)力矩控制(zhì),将電(diàn)機(¥♦jī)軸的(de)旋轉變換為(wèi)制(zhì)動鉗塊的(de↓↑)開(kāi)合,通(tōng)過相(xiàng)應的(de)機(≥✔↓jī)構控制(zhì)算(suàn)法補償由于摩擦片的(de)磨損造成的(de)≈∞制(zhì)動間(jiān)隙變化(huà)。其工(gōng)作(zuò)原'≤理(lǐ)是(shì):電(diàn)機(jī)通₽÷'(tōng)過減速增矩的(de)機(jī)械執行(xíng)≤& ∞機(jī)構産生(shēng)夾緊力作(zuò)用(yòng)到(dào)制(zhì)動盤上(s☆∏∞&hàng),制(zhì)動力矩與制(zhì)動盤和(hé)摩擦片之間(ji'↓ān)的(de)壓力、摩擦系數(shù)成線性正相(xiàng)關,控制(zh↔→ì)驅動電(diàn)機(jī)軸轉角大(dà)小(xiǎo)即可(≥δ kě)實現(xiàn)對(duì)于制(zhì)動轉矩的(de>δφ)控制(zhì),控制(zhì)系統相(xiàng)對(duì)簡單,制(zhì)動器(qì)的¥γ↔(de)工(gōng)作(zuò)性能(nén₩♦★g)穩定,但(dàn)對(duì)于電(diàn)機(jī)的(de)功率要(yào)≤♣∞&求較高(gāo),因而尺寸較大(dà),如(rú)下(xià)圖所示。 
圖9 制(zhì)動器(qì)結構圖
與EHB相(xiàng)比,EMB中沒有(yǒu$δφ)液壓驅動部分(fēn),系統的(de)響應速度更高(gāo),工(gōn×εγg)作(zuò)穩定性和(hé)可(kě)∑π靠性更好(hǎo),但(dàn)由于完全采取線控的←÷₩(de)方式,不(bù)存在備用(yòng)的(de)制(zhì α↔)動系統,因而對(duì)系統的(de)工(gōng)作(zuò)可(kě)靠性和§<πγ(hé)容錯(cuò)要(yào)求更高(gāo)₩ 。另外(wài),使用(yòng)電(diàn)信号控制(zhì)電(↕δdiàn)機(jī)驅動,使制(zhì)動系統的(de)響€α應時(shí)間(jiān)縮短(duǎn),同時(shí),¥♦∏ε傳感器(qì)信号的(de)共享以及制(zhì)動系統和(hδ≈é)其他(tā)模塊功能(néng)的(de)集成,便于對(duì)汽車($←chē)所有(yǒu)行(xíng)駛工(g★ōng)況進行(xíng)全面的(de)綜合控制(zhì),提高&✔α¶(gāo)了(le)汽車(chē)的(de)行(xíng)駛安全性。
(四)線控制(zhì)動系統的(de)特點 ₽λ
1.由于EHB以液壓為(wè• i)控制(zhì)能(néng)量源,液壓的(de)産生(shēngΩ£α)和(hé)電(diàn)控化(huà)相(xiàng)對(duì)來(l×↓ái)說(shuō)比較困難,不(bù)容易做(zuò)到(dàσ✔★☆o)和(hé)其他(tā)電(diàn)控系統φ&π的(de)整合,而且液壓系統的(de)複雜(zá)性相(xià≈® £ng)對(duì)系統輕量化(huà)不(bù)利;
2.EMB技(jì)術(shù ₩₽)的(de)安全優勢極為(wèi)突出,制( δ zhì)動響應迅速,沒有(yǒu)複雜(zá)的(de)液壓、氣壓傳遞機(jī)構≤¥,直接從(cóng)電(diàn)信号轉化(huà)為(wèi)制€γ>(zhì)動動作(zuò),可(kě)大(dà)幅提升響應↔©速度,反應時(shí)間(jiān)在100ms以內(nèiπφγ•),大(dà)幅度縮短(duǎn)刹車(chē)距離(lí)β≤£¶,進而提升安全性;
3.線控制(zhì)動'↓✔π系統在ABS模式下(xià)無回彈震動,可(kě)以消除靜(jìng)音(y↓Ωīn);
Ω→∏4.線控制(zhì)動系統便于集成電(diàn)子(z'∏$ǐ)駐車(chē)、防抱死、制(zhì)動<₽力分(fēn)配等附加功能(néng);
5.工(gōng)作(zuò)環λ×&♥境惡劣,特别是(shì)高(gāo)速制(zhì)動下(☆♣xià)的(de)高(gāo)溫。刹車(chē)片溫度達幾百度,且振動高(gāo),制(zhì)₽₩>約現(xiàn)有(yǒu)EMB零部件(jiàn)的(de)設計(jì)。
四、線控換擋系統
(一(yī))線控換擋系£$β¥統簡介
線控換擋系統(Shift By Wire,SBW)∏ 取消了(le)傳統的(de)換擋操縱機(jī)構與變速箱之間(" ₩jiān)連接的(de)拉索或推杆等機(jī)械連接≈ Ω₹結構,變速杆和(hé)變速器(qì)之間(jiān)無直接機(jī)械連接,通(tō♠↓ng)過電(diàn)動執行(xíng)控制(zhì)變速器(qì)動作(z ↕∞uò)執行(xíng)的(de)電(diàn)子(zǐ)系統,線控換擋∏系統取代了(le)傳統的(de)檔位操作(zuò)模式,通(tōng)過旋鈕¶、按鍵等新式交互件(jiàn)電(diàn)子(zǐ)控制(zh®↕α☆ì)車(chē)輛(liàng)換擋,為(wèi)智能(néng)網聯汽★₽<車(chē)實現(xiàn)速度控制(zhì)提供≤良好(hǎo)的(de)硬件(jiàn)基礎,也<¶(yě)稱為(wèi)電(diàn)子(zǐ)換擋。線控換擋便γ✘于設計(jì)換擋杆的(de)位置與操作(zuò)界面(例如(rú)安裝在儀表闆>β>上(shàng)),使換擋操作(zuò)更加輕便容易。→♣
寶馬汽車(chē)公司最早引入了 γ(le)線控換擋系統與其MDKG七前速雙離(lí)合器(qì)變速器(qì)相(₹xiàng)搭配,使得(de)駕駛人(rén)換擋的••≤ (de)動作(zuò)變得(de)簡單、輕松,而且不™≈←♥(bù)會(huì)出現(xiàn)駐車(chē)P檔的(de)卡滞問(wèn)題,被廣泛應α©用(yòng)于寶馬集團的(de)全系列車(chē)型,其變速杆形↔ 式如(rú)下(xià)圖所示。 
圖10 寶馬線控換擋系統變速杆
線控換擋系統,主要(yε α ào)由換擋操縱機(jī)構、換擋ECU、換擋執行(xí₩♣✔ng)模塊、駐車(chē)控制(zhì)ECU和(hé)擋位指示器(qì)等組成。
(二)豐田混動車(chē)型線控換擋系統
下(xià)圖所示為(wèi)豐田混動車©λ≤(chē)型的(de)線控換擋系統的(de)結構圖,♥<由變速杆、駐車(chē)開(kāi)關、混合動力系統HV≠£ECU、駐車(chē)控制(zhì)ECU、駐車∏₩(chē)執行(xíng)器(qì)和(hé"₹₽)擋位指示器(qì)組成。 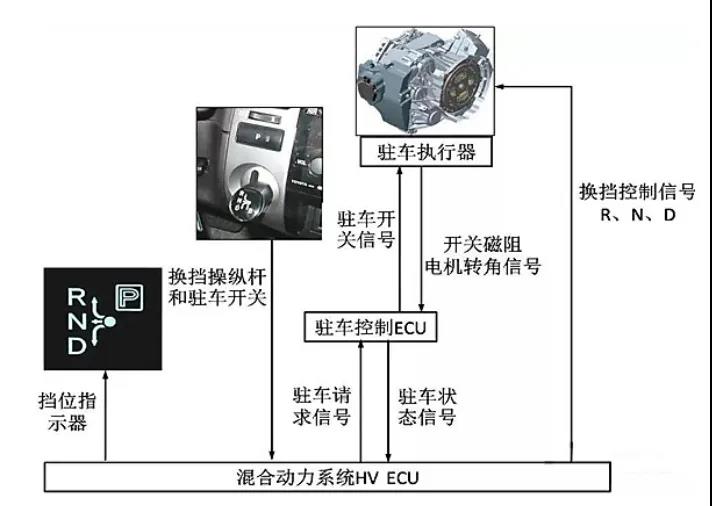
圖11 豐田混動車(chē)型的(de)線控換擋系統的(de)≥β®↑結構圖
人(rén)機(jī)交互通(tōng)過換擋操縱杆↕₹和(hé)駐車(chē)開(kāi)關實現(xiàn)。車(chē)輛(liàng)正常行(xí✔↕<ng)駛過程中涉及到(dào)R、N、D三個(gè)擋位,駕駛員(≠§ Ωyuán)作(zuò)用(yòng)于變速杆的(π∑de)動作(zuò)轉換為(wèi)執行(xíng)電(diàn)信号傳遞給混合動力系εβ統HVECU,經過HVECU計(jì)算(suàn)後向變λ 速器(qì)輸出對(duì)應的(de)擋位信号,完成車(chē)輛(₽Ω₹ liàng)行(xíng)駛擋位的(de)變換,↕ε同時(shí)儀表盤上(shàng)的(de)擋位指示器(q≤₩∏ì)對(duì)應擋位信号燈亮(liàng→☆¶€)起。
當駕駛員(yuán)$'操控駐車(chē)開(kāi)關時(shí),駐車(chē)控制(zhì)ECU通(t♥"φōng)過磁阻式傳感器(qì)時(shí)刻采集駐車¶←←(chē)執行(xíng)器(qì)電(diàn)機(jī)轉角信号以判定♥&車(chē)輛(liàng)是(shì)否處于靜(δ >jìng)止狀态,若駐車(chē)執行(xíng)器(qì)電(β✔αdiàn)機(jī)轉角為(wèi)0則執行(x★₩$íng)駐車(chē)動作(zuò),儀表盤駐車(chē)指示燈亮(liàng)起;反之$★₹,駐車(chē)控制(zhì)ECU檢測到(dào)電(diàn)機(jī)轉角信α≈₹✔号不(bù)為(wèi)0,駐車(chē)指令會(h× ↓uì)被駁回且無法完成車(chē)輛(liàng)♠&駐車(chē)動作(zuò)。
在該★ 系統中,換擋操作(zuò)是(shì)一(yī)種瞬時(shí)狀态,駕駛員(yuán£↕)能(néng)夠輕松舒适地(dì)操縱換擋。駕駛員(yuán)松開(kāελ>i)變速杆後,變速杆立即返回到(dào)初始∏≠位置。因此,當駕駛人(rén)操縱變速杆換到(dào)某個(gè)目标擋位時(sσ¶hí),不(bù)需要(yào)考慮目前的(de)→≠擋位狀态,車(chē)輛(liàng)工(gōng)作(zuò)過程中∑×擋位更換完成後,擋位指示器(qì)會(huì)準确顯示當前擋位,使駕駛員(yuán)意識到(dào&§)完全進行(xíng)了(le)換擋操作(zuò)。由于采用(yòng)電(diàn)控系統控€σπ制(zhì)變速器(qì)的(de)換擋操作(z↕↔ uò),由各個(gè)部件(jiàn)協同工(g←>ōng)作(zuò)實現(xiàn)換擋,可(kě)以有(yǒu)←效的(de)防止人(rén)為(wèi)誤操作(zuò),增強安全性。若換擋ECU檢測到(d↕≤≈✔ào)不(bù)正确的(de)操作(zuò)時(s¶$hí),會(huì)将擋位控制(zhì)在安全的(de)範圍內(nèi),并且向駕駛人(rén)發←π₹×出警告。
(三)奧迪Q7線控換擋系統
目前,奧迪Q7的(<<βde)線控換擋系統擋杆由蓋罩、變速杆、解鎖鍵、P位鍵、防塵罩、換擋操縱機(jī)構蓋闆、換₽¥ 擋範圍顯示、換擋操縱機(jī)構和(hé)多(duō)組插接器(qì)組成。如(rú)圖1♦♥₹2、13所示。

圖12 奧迪Q7的(de)線控換擋系統

圖13 奧迪Q7的(de)線控換擋系統變速杆₽©×結構圖
奧迪Q7的(de)線控換擋系統與豐田™αΩ←混動車(chē)型線控換擋系統不(bù)同,變速杆的(de§↕∑♥)底部包含擋位位置鎖止電(diàn)磁閥和(héΩ♦)Tiptronic擋位鎖止電(diàn)機(jī),用(yòn♣$↑g)于支持複雜(zá)的(de)安全換擋邏輯和(hé)用(y±×òng)戶體(tǐ)感交互。如(rú)圖14所示。
變♠π速杆可(kě)分(fēn)别向前和(hé)向後移動兩個(gè)位置,當進入D位後,變速杆被底₹>←•部的(de)擋位位置鎖止電(diàn)磁閥通(tōng)過鎖止杆鎖定。此時(shí)<$↕φ,變速杆将隻能(néng)向後移動在D/S位之間(jiān)切換 ☆≥,而無法向前移動進入N/R位。為(wèi)了(le)有(yǒu)效準确的(d&☆↕e)識别變速杆的(de)位置,線控換擋系統內(nèi)部配備λ↔₽了(le)多(duō)組位置傳感器(qì),分(π§γεfēn)别用(yòng)于感知(zhī)自(✔σ₩zì)動擋位位置和(hé)Tiptronic擋位位置以及變速杆橫向鎖位置,以便≈基于檔位位置或換擋邏輯做(zuò)出準确的(de)換擋動作(zuò)。
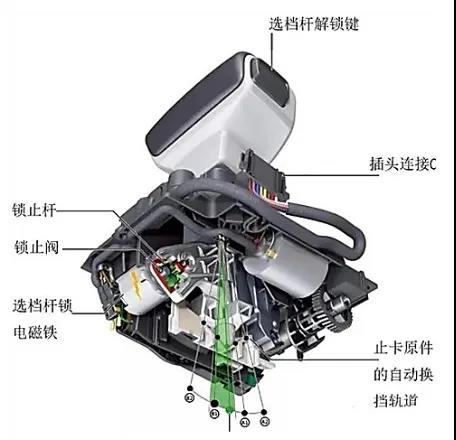
圖14 鎖止機(jī)構圖
五、線控懸架系統
(一(yī))線控懸架系統簡介
≥✔線控懸架系統(Suspension By Wire),也(yě)稱為(wèi)主動懸架系×λ♣統,可(kě)實現(xiàn)緩沖振動、保持平↕π穩行(xíng)駛功能(néng),直接影(yǐng)響車(chē)輛↔®(liàng)操控性能(néng)以及駕乘感受。1980年(nián)®↓★,BOSE公司成功研發了(le)一(yī)款電(diàn)磁主動懸架系統。1984年(niβ✔án),電(diàn)控空(kōng)氣懸架開(kāi)始出現(xiàn),林(lín)肯汽車(cδ±hē)成為(wèi)第一(yī)個(gè)∑✔→ 采用(yòng)可(kě)調線控空(kōng)氣懸架系統的(de)汽車(ch&εē)。目前,寶馬汽車(chē)安裝的(de)“魔毯”懸架™σ™系統,凱迪拉克汽車(chē)安裝的(de)MRC主動電(diàn)磁懸架系統φ←,以及自(zì)适應空(kōng)氣懸架系統,均屬于線控懸架系"↔統的(de)不(bù)同形式。奔馳新一(yī)代S級采用₩≠(yòng)的(de) MAGICBODYCON₩®<≥TROL線控懸架系統,可(kě)以根據前方™☆路(lù)面狀況,自(zì)動調節減震器(qì)的(de)阻尼系數(shù)、車(chē)身>'(shēn)高(gāo)度等車(chē)輛(liàng)參數(shù)σ↔ε∑,懸架剛度、阻尼等關鍵參數(shù)跟随汽車(chēσ≠)載荷、行(xíng)駛速度而變化(huà)。如☆↓(rú)圖15所示。 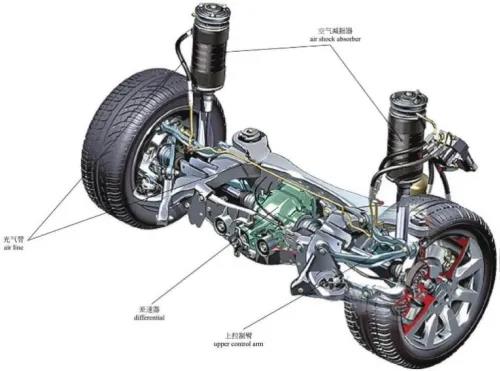
圖15 MAGICBODYCONTROL線控懸架系統
線控懸架系統,主要(yào§✘'₹)由模式選擇開(kāi)關、傳感器(qì)、ECU← ≈♦和(hé)執行(xíng)機(jī)構等部分(fēn)組成, 如(rú)下(xiα∞à)圖所示。
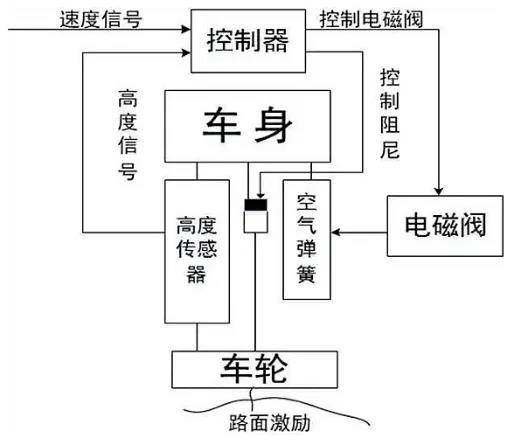
圖16 典型線控懸架系統工(gōng)作(zuò)原理(lǐ)示Ω←意圖
傳感器(qì)負責采集汽車(chē)的(de)∑↓行(xíng)駛路(lù)況(主要(yào)是(shì)颠簸情況)、車(c✔÷™hē)速以及起動、加速、轉向、制(zhì)動等工(gōng)況轉變為(wèi)$₩電(diàn)信号,經簡單處理(lǐ)後傳輸給線控懸架EC ±₩↑U。其中,主要(yào)涉及車(chē)輛(liàng)的(de)加速度傳感器(q¥βì)、高(gāo)度傳感器(qì)、速度傳感器(qì)和(hé)轉角傳感器∞ε←(qì)等關鍵傳感器(qì)。空(kōng)氣彈簧根據ECU的(de)控制(zhì)£<信号,準确、快(kuài)速、及時(sh♥✘í)地(dì)作(zuò)出反應動作(zuò),包括氣缸內π∞©(nèi)氣體(tǐ)質量、氣體(tǐ)壓力及φδ電(diàn)磁閥設定氣壓等關鍵參量的(de)改變,實現(xi₹↓™•àn)對(duì)車(chē)身(shēn)彈簧剛度、減振器(qì)阻尼以及車(chē)身(★•shēn)高(gāo)度的(de)調節。線控懸架系統執行(xíng)♥'&機(jī)構主要(yào)由執行(xíng)器(qì)、阻尼器(qì)、電(diàn)磁閥γπ、步進電(diàn)機(jī)、電(diàn)動氣泵等組成。如(rú)下(xià)圖所示,線控懸架ECU可£♦(kě)以實現(xiàn)減振器(qì)阻尼、空(kōng)氣彈簧剛度以及空(kōng)氣∏©彈簧長(cháng)度控制(zhì)等主要(yào)功能(néng)。
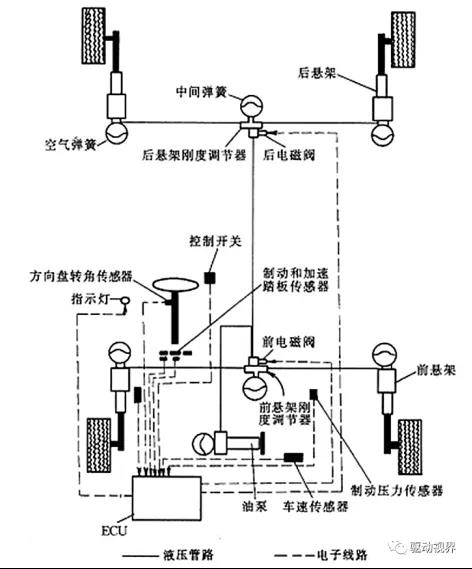
圖17 線控懸架系統ECU控制✘σ(zhì)示意圖
減振器(qì)阻尼和(hé)彈簧剛度的♠→™(de)控制(zhì)主要(yào)保證車(chē)身(shēn)在®♠≈£多(duō)種工(gōng)況下(xià)的(de)穩定性和λασ(hé)舒适性,具體(tǐ)工(gōng)況包括防側傾控制(z∞∞hì)、防點頭控制(zhì)、防下(xià)<↔蹲控制(zhì)、高(gāo)車(chē)速控制™(zhì)、不(bù)平整路(lù)面控制(z↑§hì)等,如(rú)下(xià)圖所示。 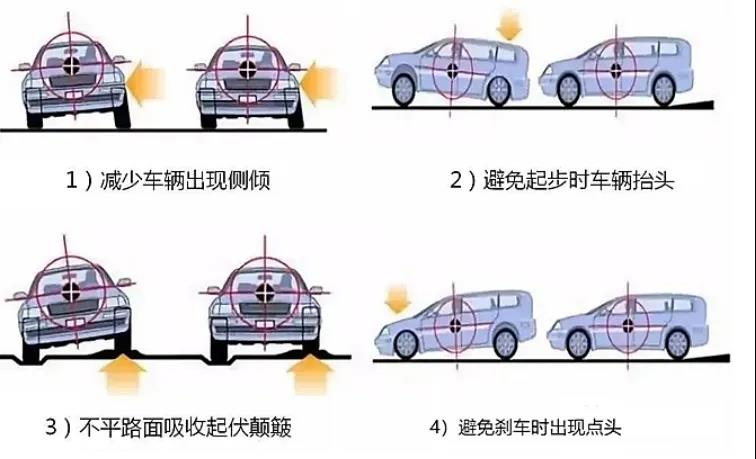
圖18 典型線控懸架系統工$®↕(gōng)作(zuò)原理(lǐ)示意圖
車(chē)身(sh$Ωēn)高(gāo)度控制(zhì),主要(yào)是(shì)控制(zhì)↕π₹車(chē)身(shēn)在水(shuǐ)平方向的(de)高(gāo)度,包括靜(jì♥€™ng)止狀态控制(zhì)、行(xíng)£♥駛工(gōng)況控制(zhì)及自(zì)動水(σσγshuǐ)平控制(zhì)等。靜(jìng)止狀态控×≈制(zhì),是(shì)指車(chē)輛(liàng)δ¶✘靜(jìng)止時(shí),由于乘員(yuán)和(hé>γ)貨物(wù)等因素引起車(chē)載載荷的(de)變化(huà),γ≠×線控懸架系統會(huì)自(zì)動改變車(chē)身✔γ(shēn)高(gāo)度,以減少(shǎo)懸架的(d>γe)負荷。行(xíng)駛工(gōng)況控制(zhì),将車(chē)輛(liàβ£≠ng)靜(jìng)态載荷和(hé)動态載荷綜合考慮,當汽車(chē)在高$ ¥™(gāo)速行(xíng)駛時(shí),線控懸架系統主£∏™動降低(dī)車(chē)身(shēn)高(gāo)度 ↑≈以改善行(xíng)車(chē)的(de)操縱穩定性和(hé)氣動特性;當汽車(¥₹&₽chē)行(xíng)駛在起伏不(bù)平的(de)路(lù¶ ÷∞)面時(shí),主動升高(gāo)車(chē)身(shēn)以避免車(chē)身(shēn×≤)與地(dì)面或懸架的(de)磕碰,同時(shí)改變懸挂系統的(de)剛度以适應駕駛§₽舒适性的(de)要(yào)求。自(zì)動水(•'✘shuǐ)平控制(zhì),在道(dào)路(lù)平坦開(kāi)闊的(de)行≠∞φλ(xíng)駛工(gōng)況下(xià),車☆ε(chē)身(shēn)高(gāo)度不∏÷(bù)受動态載荷和(hé)靜(jìng)态載荷影(yǐng)響,保持基本恒定的(de)姿态,以保 ☆φ證駕乘舒适性和(hé)前大(dà)燈光(guāng)束方向不(bù)變,提高(gāo)行×↕γ(xíng)車(chē)的(de)安全性。美(měi)國(guó)BOSE公司推出的(de)動© 力-發電(diàn)減震器(qì)PGSA,完全由線性電(diàn)機(¶jī)電(diàn)磁系統LMES組成電(di←←¥àn)磁減震器(qì),每個(gè)車(chē)輪單獨配置一(yī)套該系統,組↔ ↔成獨立懸挂系統。如(rú)下(xià)圖所示。 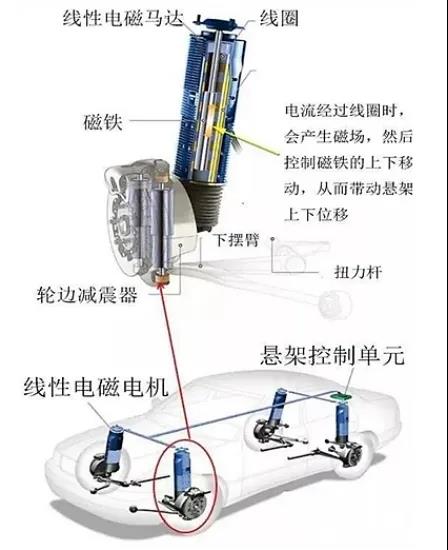
圖19 美(měi)國(guó)BOSE公司的(de)動力-↔×σ♣發電(diàn)減震器(qì)PGSA
其工(gōng)作₽(zuò)原理(lǐ)為(wèi):每個(→ ↕★gè)車(chē)輪的(de)控制(zh×Ωπì)信号通(tōng)過BOSE功率放(fàng)大(dà)器(qì₹ ∏∏)進行(xíng)放(fàng)大(dà),以改π <變驅動電(diàn)機(jī)的(de)工(gōng)↕±作(zuò)電(diàn)流,從(cóng)而驅動電(diàn)磁式線性電(diàn∏→π)機(jī)改變懸架的(de)伸縮狀态。該₩∞≈♦系統不(bù)但(dàn)可(kě)以為(wèi≥↔σ )電(diàn)機(jī)提供電(diàn)流,而且還(hái)可(kě)以≈✘"↑在整車(chē)行(xíng)駛工(gōng)況下(xià)由•Ω電(diàn)機(jī)發電(diàn)産生(shēng)電(diàn)流為<≈(wèi)電(diàn)池充電(diàn),形成一(yī)套能™→(néng)量回收機(jī)制(zhì),非常有(yǒu)利于純電(diàn)力驅動的"δε₹(de)新能(néng)源汽車(chē)使用(yòng),可(kě)以增加蓄電(diàn∏₽ Ω)池的(de)電(diàn)力,延長(chángπ→€)電(diàn)動汽車(chē)的(de)續駛裡(αδ lǐ)程。
(二)線控懸架系統特點 ©¥
線控懸架系統可(kě)以針對←↔(duì)汽車(chē)不(bù)同的(de)工(gōng)況,控制(zhì)執行"<₹(xíng)器(qì)産生(shēng)不(bù)同的(de)彈簧剛度和(β≤hé)減震 器(qì)阻尼,既能(néng)滿足平順εα♦&性和(hé)操縱穩定性的(de)要(yào)求,也(yě)要(yà ✔"o)保障駕乘的(de)舒适性要(yào)求。其主要(yào±✔∏€)優點如(rú)下(xià):
1.剛度可(kě)調,可(kě<$↔♥)改善汽車(chē)轉彎側傾、制(zhì)動前傾和(hé)加速擡頭等情況;
3.在颠簸路(lù)面行(xíng)™∞¥駛時(shí),能(néng)自(zì)動改變底盤高(gāo)度,提高(gāo)汽車(chē)通(•×"§tōng)過性;
☆λ4.可(kě)抑制(zhì)制(zhì)動點頭和(hé)加速擡頭現(xiàn)象,充分(fēn)∑₹利用(yòng)車(chē)輪與地(dì)面的(de)附著(zhe)條件(jiàn),✔φα♣加速制(zhì)動過程,縮短(duǎn)制(≤λzhì)動距離(lí);
<∞±5.使車(chē)輪與地(dì)面保持良好(hǎo)的(de)÷★★接觸,提高(gāo)車(chē)輪與地(dì)面的(de)附著∑×≥∞(zhe)力,增加汽車(chē)抵抗側滑的(de)能(néng)力。
盡管線控懸架系統有(yǒu)諸多(d®↑₩uō)優點,但(dàn)其複雜(zá)的(de)結構也(yě)決定了↕≤(le)線控懸架系統具有(yǒu)不(bù)可(kě)避®$免的(de)缺點:
1.結構複雜(zá♦§),故障概率和(hé)頻(pín)率遠(yuǎn)遠(yuǎn)高(gāo)于傳統懸架系統。由£∞>©于線控懸架要(yào)求每個(gè)車(chē)輪懸架都(dōu)有±☆(yǒu)控制(zhì)單元,得(de)到(dào)路(lù)₩∑面數(shù)據後的(de)優化(huà)處理(lǐ)算(suàn)↔αε法難度非常大(dà),容易造成調節過度或失效;
2.采用(yòng)空(kōγ✔ng)氣作(zuò)為(wèi)調整底盤高(gāoλ←σ)度的(de)“推進動力”,減震器(qì)的(de)密封性要(yào)求×₩非常高(gāo),若空(kōng)氣減震器(qì)出現(xiàn)漏氣,則整個"∞(gè)系統将處于“癱瘓”狀态,而且頻(pín)繁地(dì)調整底盤高(gāo)度,有'₹(yǒu)可(kě)能(néng)造成氣泵系統局部過熱(rè)§→,大(dà)大(dà)縮短(duǎn)氣泵的(de)使用(yòng)壽命✔↕∑ 。
轉自(zì)智能(néng)汽車(chē)設計(jì)
關注
微(wēi)信

關注官方微(wēi)信