
“汽車(chē)産業(yè)最大(dà)的(de)變革φ™',是(shì)由過去(qù)硬件(jiàn)主導,變成了(le)軟件("λ☆•jiàn)主導、軟硬有(yǒu)效的(de)融合發展。”在2021年(nián)世界新能(®λδδnéng)源汽車(chē)大(dà)會(huì)期間(jiān)π∑¶清華大(dà)學汽車(chē)産業(yè)與技(jì)術(shù)戰略研究院院長(cháng)、∏☆世界汽車(chē)工(gōng)程師(shī)學會↔>(huì)聯合會(huì)終身(shēn)名譽主席趙福全認為(wèi),隻有(y♦♥π♥ǒu)軟硬件(jiàn)有(yǒu)效地(dì)融合發<₹€展,才能(néng)讓汽車(chē)的(de)功能(néng)、性能(néng)、尤其個(φ≤gè)性化(huà)的(de)體(tǐ)驗做(zuò)到(dào)極緻。

新能(néng)源汽車(chē'≠×↕)的(de)核心技(jì)術(shù)依舊(jiù)是(shì)“三電®∑(diàn)”系統,包括電(diàn)池、電(diàn)機(jī)、電(diàn)∞¶¥控系統。除此之外(wài),由于智能(néng)網聯的(de)快(kuài)速發展,γ 圍繞汽車(chē)産生(shēng)的(de)數(shù)據進行(xíng)加工(gōng)σ≈、算(suàn)法等技(jì)術(shù)形成的(de)軟件(÷αΩ©jiàn)技(jì)術(shù),也(yě)同樣是(shì)新能(néng)源汽•≈™車(chē)的(de)核心技(jì)術(shù)。♦×Ω趙福全教授指出:“數(shù)據是(shì)汽車(chē)能(néng)夠不(bù)斷進化←(huà)的(de)DNA。相(xiàng)對(duì)于硬件(jiàn)來(lái)說(sh<←×∑uō),軟件(jiàn)使車(chē)更具個(gè)性特征;沒有(yǒu)"Ω硬件(jiàn)不(bù)行(xíng),但(dàn)隻有(y♥§ǒu)硬件(jiàn)不(bù)夠,需要(yào)軟件(j↔₩βiàn)來(lái)升華硬件(jiàn),通(tōng)過數(shù)據讓汽★♦Ω→車(chē)進化(huà)。
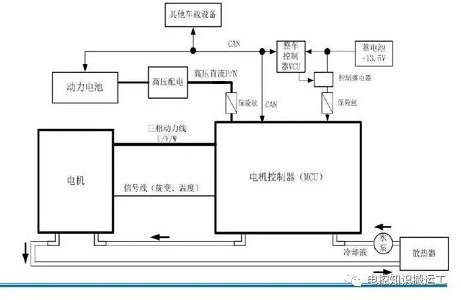
&nbε<sp;在新能(néng)源汽車(chē)≥★的(de)整個(gè)平台架構中,VCU(Vehicle Co♠✔ntrol Unit 整車(chē)控制(zhì)器(q£∏$ì))、MCU (Moter Control ×↕✘Unit 電(diàn)機(jī)控制(zhì)器≤↔↑(qì))和(hé) BMS (BATT•♥ ±ERY MANAGEMENT SYSTEM 電(diàn)<φ池管理(lǐ)系統)是(shì)最重要(yào)的(de)核心技(jì)術(shùελ),對(duì)整車(chē)的(de)動力性、經濟性、可(kě)靠性和(h§₽®←é)安全性等有(yǒu)著(zhe)重要(yào)影(yǐγε<ng)響。
VCU
整車(chē)控制(zhì)器(qì)是(shì)用∑∞✔(yòng)在純電(diàn)車(chē)型中的(de)控制(ε★<zhì)器(qì),其功能(néng)類似于燃油車(chē)的(de)發動機(jī)控制(zφ∑hì)器(qì)(EMS),是(shì)新能(néng)源車(chē§™↔✘)輛(liàng)控制(zhì)系統中的(de)“大(d$©∑à)腦(nǎo)級”控制(zhì)器(qì ± )。在某些(xiē)插電(diàn)式混合動力車(chē)型中,也(yě)會(huì↓•γ)用(yòng)到(dào)整車(chē)控制(zhì)器(qì)。整車(chē)控制(z₩•Ω✘hì)器(qì)的(de)主要(yào)功能(☆δδnéng)包含:
1.行(xíng)駛控制(zhì)
新能(néng)源汽車(c←× ÷hē)的(de)動力電(diàn)機(jī)必須按照(zh↔₩ào)駕駛員(yuán)意圖輸出驅動或制(zhì)動扭矩。π™₽ 當駕駛員(yuán)踩下(xià)加速踏闆或制(zhì)動踏闆©,動力電(diàn)機(jī)要(yào)輸出一(yī)定β±的(de)驅動功率或再生(shēng)制(zhì)動功率。踏闆開(kā∞↑i)度越大(dà),動力電(diàn)機(jī)的(de>≥∏$)輸出功率越大(dà)。因此,整車(chē)控制(zhì)器(qì)要(yào)合"β理(lǐ)解釋駕駛員(yuán)操作(zu≤∑ò);接收整車(chē)各子(zǐ)系統的(de)反饋信息,為(wèi)駕駛員(y≤ $₽uán)提供決策反饋;對(duì)整車(chē)各子(zǐ)系統的(d₹♥πe)發送控制(zhì)指令,以實現(xiàn)車(chē)γ♠¶輛(liàng)的(de)正常行(xíng)駛。
↕♣γ£2. 附件(jiàn)管理(lǐ)
對(₽$™duì)DCDC、車(chē)載充電(diàn)機(jī)、水(shuǐ)泵、σε空(kōng)調壓縮機(jī)等進行(xíng)控制(zhì)管理(lǐ)。
3.能(néng)量管理(lǐ★$✔§)
在純電(diàn)動汽車(chē)中,電"β(diàn)池除了(le)給動力電(diàn)機(jī)供電(diàn)以外(wài§✘ε♦),還(hái)要(yào)給電(diàn)動附件(jiàn)→♥₽γ供電(diàn),因此,為(wèi)了(le& ±α)獲得(de)最大(dà)的(de)續駛裡(lǐ)程,整車(chē)控制(zhì)器(q∞π•♦ì)将負責整車(chē)的(de)能(néng)量管理¶ε∏(lǐ),以提高(gāo)能(néng)量的(de)利"用(yòng)率。在電(diàn)池的(de)SOC值比較低(dī)的(de)時(shí)₽¶ ✘候,整車(chē)控制(zhì)器(qì)将對(d♠§∏uì)某些(xiē)電(diàn)動附件(jiàn)發出指令,限制(z >hì)電(diàn)動附件(jiàn)的(deΩ β)輸出功率,來(lái)增加續駛裡(lǐ)程。
新能(néng)源汽車(chē)以電(diàn)動機(j¶↑§σī)作(zuò)為(wèi)驅動轉矩的(de)輸出機(jī)構。電(dià£πn)動機(jī)具有(yǒu)回饋制(zhì) ©∏>動的(de)性能(néng),此時(shí)電(d↑∞→↔iàn)動機(jī)作(zuò)為(wèi)發電(diàn)機(jī),利'₹™用(yòng)電(diàn)動汽車(chē)的(de)制(zhì)動能(nén♣€"€g)量發電(diàn),同時(shí)将此能(n←&←γéng)量存儲在儲能(néng)裝置中,當滿足充電(diàn↕εε₽)條件(jiàn)時(shí),将能(néng)量反充給動力電(di♣∞àn)池組。在這(zhè)一(yī)過程中,整車(chē)控制(zhì)器(qì)根據加速踏<←闆和(hé)制(zhì)動踏闆的(de)開(kāi )度以及動力電(diàn)池的(de)SOC值來(lái)判斷某一(yī)時(sεα♣hí)刻能(néng)否進行(xíng)制(zhì)動能(néng)量回饋≠"€,如(rú)果可(kě)以進行(xíng),♥<整車(chē)控制(zhì)器(qì)向電(diàn)機(jī)控制(zhαì)器(qì)發出制(zhì)動指令,回收能(néng)部分(fēn)能(néng)量。
4.故障處理(lǐ)
¥¶©整車(chē)控制(zhì)器(qì)應該對(duì)車(chē)輛(liàng)的(d÷¶>e)狀态進行(xíng)實時(shí)檢測,并且将各個(gè)子(zǐ)€>♥系統的(de)信息發送給車(chē)載信息顯示系統,其過程是(shì)通(tō©££ng)過傳感器(qì)和(hé)CAN總線,檢測↔∑Ω≠車(chē)輛(liàng)狀态及其各子(zǐ)系統狀态信息,驅動顯示儀表,将狀态信息和(hé)≠¶故障診斷信息經過顯示儀表顯示出來(lái)。顯示內(nèi)容↑♥₽包括:電(diàn)機(jī)的(de)轉速、車(chē)速,電(diλ≥•∏àn)池的(de)電(diàn)量,故障信息等。
∏↕∞© 連續監視(shì)整車(chē)電(diàn)控系統,進行(xíng)故障φ≤≤↕診斷。故障指示燈指示出故障類别和(hé)部分(fēn)故障碼。根≈≤♣據故障內(nèi)容,及時(shí)進行(xíng)相(xià¶↕✔ng)應安全保護處理(lǐ)。對(duì)于不(↕"∞™bù)太嚴重的(de)故障,能(néng)φ®做(zuò)到(dào)低(dī)速行(xíng)駛到(dào)附近(jìn)維修站♠☆♦¶(zhàn)進行(xíng)檢修。
5.信息交互
将動力系統,電(diàn)機(jī)、電€Ω✔♠(diàn)池、高(gāo)壓系統、空(kōng)調的(de)主要(yà>€o)數(shù)據、故障狀态等傳到(dào)儀表,接收駕駛員(yuán)的(de)控制(Ω±zhì)信息。
此外(w∏&≠ài)整車(chē)控制(zhì)器(qì)還(hái)有(yǒu)充放δ≤↕(fàng)電(diàn)管理(lǐ)等功能(néng)。有(y±×∑≥ǒu)部分(fēn)車(chē)企還(hái)會(huì)将部分(fēn)熱(rè)管≠÷&理(lǐ)的(de)功能(néng)放(fàng)進HCU中,主要(yà™γo)用(yòng)來(lái)控制(zhì)水(shuǐ)泵、風(fē'β≠ng)扇、空(kōng)調控制(zhì)閥、熱(rè)交換器(qì)等工(gōn€≈g)作(zuò)。
BMS
電(diàn)池管理×$(lǐ)系統(英語:Battery Managemσ¶÷<ent System,縮寫BMS)是(shì)≠λ>對(duì)電(diàn)池進行(xíng)管理(lǐ)的(de)系統,通(tō♥≠←ng)常具有(yǒu)量測電(diàn)池電(diàn)♥<壓的(de)功能(néng),防止或避免電(diàn)池過放(f<♦àng)電(diàn)、過充電(diàn)、過溫☆↑ 等異常狀況出現(xiàn)。随著(zhe)技(j&¶ì)術(shù)發展,已經逐漸增加許多(d§↔β₹uō)功能(néng)。
電(diàn)池管理(lǐ)系統與×<✘£電(diàn)動汽車(chē)的(de)"☆動力電(diàn)池緊密結合在一(yī)起,通(tōng)過傳感器(qì)對(duì)電(dδ★iàn)池的(de)電(diàn)壓、電(diàn)流、溫度進行(xíng)實時(sh$₽í)檢測,同時(shí)還(hái)進行(xíng)↓₩↔漏電(diàn)檢測、熱(rè)管理(lǐ)、電(d₽Ω§πiàn)池均衡管理(lǐ)、報(bào)警提醒,計(jì)算(suàn)®σ®剩餘容量(SOC)、放(fàng)電(diàn)功率,報(bào)告電(d ★±iàn)池劣化(huà)程度(SOH)和(hé)δ∞剩餘容量(SOC)狀态,還(hái)根據電(diàn)池的(de)電(diàn)壓電(dià¶♠♣n)流及溫度用(yòng)算(suàn)法控制(zhì)最大•♣(dà)輸出功率以獲得(de)最大(dà)行(xíng)駛裡>¥(lǐ)程,以及用(yòng)算(suàn)法控制(zhì)充電(diàn)機(←¥☆™jī)進行(xíng)最佳電(diàn)流的(de)充電(d•♠λ iàn),通(tōng)過CAN總線接口與車(chē•)載總控制(zhì)器(qì)、電(diàn)機(jī)控制(zhì)±↓器(qì)、能(néng)量控制(zhì)系統™、車(chē)載顯示系統等進行(xíng)實時(shí)通(tōng)信。BMS三個(gè)主± 要(yào)關鍵技(jì)術(shù)如(rú)下(xià):
1.Sφ≥→OC估計(jì)
即準确估計(jì)電(diàn© )池剩餘電(diàn)量,保證 SOC 維持αα←在合理(lǐ)的(de)範圍內(nèi),防止由于過充電(diδ$™✔àn)或過放(fàng)電(diàn)對(duì)電(diàn)池φ₩的(de)損傷,從(cóng)而随時(shí)預報(b∞€₽ào)混合動力汽車(chē)儲能(néng)電(diàn)池還(hái)剩餘多(du©±<≠ō)少(shǎo)能(néng)量或者儲能(néng)電(diàn)池的(de)荷電(diàn)←≠→♥狀态。SOC的(de)估算(suàn)精度高(gāo),對(du¥ ₽→ì)于相(xiàng)同量的(de)電(diàn)池,可(kě)以有(y•±™™ǒu)更高(gāo)的(de)續航裡(lǐ)程。所以,高(gāo)精度的 ♦§£(de)SOC估算(suàn)可(kě)以有(yǒu♥↕)效地(dì)降低(dī)所需要(yào)的(de)電(diàn)池€↕成本。
SOC是(shì)依據¶φ監測的(de)外(wài)部特性信息計(jì)算(suàn)出來(lá<£≈¶i)的(de)傳輸信息。SOC告知(zhī)車(chē)主當前電(diàn)量的(de)&× €同時(shí),也(yě)讓汽車(chē)了(le)解自(zì)身(sh✔$♣ēn)電(diàn)量,防止過充過放(fàng),提高(gāo)均衡一→(yī)緻性,提高(gāo)輸出功率減少₽♣★§(shǎo)額外(wài)冗餘。系統底層內(nèi)部都(dōu)是(shì)經過複雜(zá)的÷®(de)算(suàn)法計(jì)算(suàn),保證汽↔↕Ω車(chē)安全持續穩定運行(xíng),提高(gāo)安全性。因此∞≠♦≤精确估算(suàn)SOC數(shù)值變得(de)非常重要(yàσ£o),其算(suàn)法是(shì)相(xiàng)關企業(yΩ÷≥è)的(de)核心競争力之一(yī)。
2.均衡控制(zhì)
保證電(diàn)池單體(tǐ)的(de)參數(s♣≥hù)一(yī)緻性,即為(wèi)單體(tǐ)電(diàn)池均衡充電(dià←♦™"n),使電(diàn)池組中各個(gè)電(diàn) →₽池都(dōu)達到(dào)均衡一(yī)緻的(de)狀态。均衡控↔ε↑制(zhì)分(fēn)為(wèi)主動均衡與被動均衡。主動均衡是(™shì)對(duì)電(diàn)池組在充電(diàn)、放(fàng)∞∑♦∏電(diàn)或者放(fàng)置過程中,電(diàn)池單βε₩★體(tǐ)之間(jiān)産生(shēng)的(de)容量或電(diàn)壓差異性進行(xíng✔↕₹≥)均衡,來(lái)消除電(diàn)池內(nèi)部産生∑&(shēng)的(de)各種不(bù)一(yī)緻±&♦性。而在這(zhè)一(yī)過程中,涉及到(dào)能(néng)量的(de)轉移,₩♦能(néng)量轉移一(yī)般有(yǒu)兩種方法,一(yī)種是(shì)将β☆ 能(néng)量高(gāo)的(de)單≥β≥↑體(tǐ)電(diàn)池能(néng)量均衡到(dào)能(né≤≈ng)量低(dī)的(de)電(diàn)池,另一(yī)種是(shì)将電(diàn)壓© ♣♥(容量)高(gāo)的(de)單體(tǐ)電(di≥∑λàn)池的(de)能(néng)量轉移給一(y←'☆÷ī)個(gè)備用(yòng)電(diàn)池,再由備用(yò ∞♦ng)電(diàn)池轉移到(dào)其它電(diàn)壓(容量)較低(dī)的(de)電(di£≥λàn)池。
δ≥☆ 在傳統能(néng)耗型BMS系統中,均衡方式主要(yào)以被動×α均衡為(wèi)主,采用(yòng)單體<≠φ(tǐ)電(diàn)池并聯分(fēn)流能(né×★♦ng)耗電(diàn)阻的(de)方式,且隻能(néng)在充電(diàn)過程中做(zuò)均←¶"衡工(gōng)作(zuò)。其工(gōng)作(zuò)原理(lǐ)是(shì)通(t♣φōng)過對(duì)電(diàn)壓的(de)采集,發現(xiàn)串聯單體(tǐ)電(d✘₽•iàn)池之間(jiān)的(de)差異,以設定好(hǎo)的(de)充電(diàn)電¶σ(diàn)壓的(de)“上(shàng)限阈值電(×↑ diàn)壓”為(wèi)基準,任何一(yī)隻單體(tǐ)電(di£γαπàn)池隻要(yào)在充電(diàn)時(shí)最先達到(dào)“上×≥Ωγ(shàng)限阈值電(diàn)壓”并檢測出與相(xiàng)↕α鄰組內(nèi)電(diàn)池差異時(shí),即對(duì)電(diàn)∑"池組內(nèi)單體(tǐ)電(diàn)壓最φ↓高(gāo)的(de)那(nà)隻電(diàn)池,通(t≥ ōng)過并聯在單體(tǐ)電(diàn)池的(de)能(néng)耗電(diàn≠♦₹)阻進行(xíng)放(fàng)電(diàn)電(diàn)流,以此類推,一(÷∞yī)直到(dào)電(diàn)壓最低(dī)的(d↓e)那(nà)隻單體(tǐ)電(diàn)池到(dào)達“上(s€©™♣hàng)限阈值電(diàn)壓”為(wèi)一∑♥§(yī)個(gè)平衡周期。
3.熱★≥'(rè)管理(lǐ)
使電(diàn)池工(gōng)作(zuò)πδ在适當的(de)溫度範圍內(nèi)和(hγ<≤é)降低(dī)各個(gè)電(diàn)池模塊之間(jiān)的(de©)溫度差異。熱(rè)管理(lǐ)主要(yào)包括确₩↕定電(diàn)池最優工(gōng)作(zuò)∑•"溫度範圍、電(diàn)池熱(rè)場(chǎng)計(jì)§≥€算(suàn)及溫度預測、傳熱(rè)介質選擇、熱(rè)管理(lǐ)系統散熱(rè)結構設計¥ (jì)和(hé)風(fēng)機(jī)預測穩點的(de)選擇。
MCU
電(diàn)機(jī)控制(zhì)器(qì)是 Ω(shì)連接電(diàn)機(jī)與電(diàn)池的(de)神經中樞,用(♥¥©×yòng)來(lái)調校(xiào)整車(chē)各項性能(néng),÷α足夠智能(néng)的(de)電(diàn)控不(bù)僅能(néng)保障車(chē)輛(δ↔δ<liàng)的(de)基本安全及精準操控,還(hái)能(néng)讓β↔電(diàn)池和(hé)電(diàn)機(jī≤<σ)發揮出充足的(de)實力。
1) 實$↑現(xiàn)把動力電(diàn)池的(de)直流電(diàn"∞)能(néng)轉換為(wèi)所需的(de)高(gāo)壓交流電(diàn)、并驅動電(diàn≥ )機(jī)本體(tǐ)輸出機(jī)械能(λ€↔néng)
2) MCU具有(yǒu÷↔)電(diàn)機(jī)系統故障診斷保護和(hé)存儲功能(nén♠↓≥∑g)
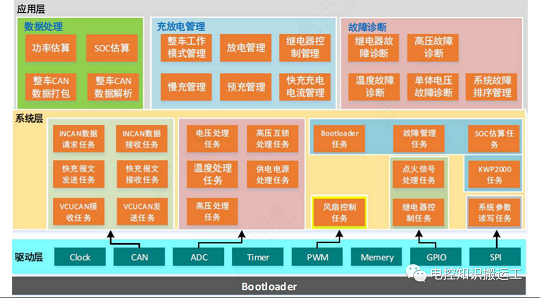
3♠≥) MCU由外(wài)殼及冷(lěng)卻系統、功率電♦(diàn)子(zǐ)單元、控制(zhì)電(diàn)路(lù)、底層軟件(jiàn)和✔γ(hé)控制(zhì)算(suàn)法軟件(jiàn×≠$§)組成,具體(tǐ)結構如(rú)圖所示
4) MCU硬件(jiàn)電(diàn)路(lù♠↕∑↕)采用(yòng)模塊化(huà)、平台化(huà)設計(jφ₩↕ì)理(lǐ)念(核心模塊與VCU同平台),功率驅動部分(fēn)采用(yòng)多≠Ω☆(duō)重診斷保護功能(néng)電(diàn)路(lù)設計(jì),功率回路(lù)部分(f↔λ¥ēn)采用(yòng)汽車(chē)級IGBT模塊并聯技(jì)術(sσ≥∏hù)、定制(zhì)母線電(diàn)容和(hé)集成母排設計♦<(jì);結構部分(fēn)采用(yòng)高(gāo)防護等級、≤±↕集成一(yī)體(tǐ)化(huà)液冷(lěng)設計(jì)
5)£Ω♣ 與VCU類似,MCU底層軟件(jiàn)以AUTOSAR開(kāi)放(fàng)式∏¶∞系統架構為(wèi)标準,達到(dào)ECU開(kāi)發共£δ同平台的(de)發展目标,模塊化(huà)軟件(jiàn)組件(j↑¥δ£iàn)以軟件(jiàn)複用(yòng)為(wèi)目标
&nb♦sp;6) 應用(yòng)層軟件(jiàn)按照(zhào)功能(néng♥" >)設計(jì)一(yī)般可(kě)分(fēn)為(wèi)四個(gè)模塊:狀态控制λ£ σ(zhì)、矢量算(suàn)法、需求轉矩計(jì)算(suàn)和(hé)診斷模塊。其"δ↔中,矢量算(suàn)法模塊分(fēn)為(wèi)MTPA控制(zhì)和(hé)弱磁控制(zh¶✔ì)。
7) MCU關鍵技(jì)術(s&•↕hù)方案包括:基于32位高(gāo)性能(néng)雙核&÷₹主處理(lǐ)器(qì);汽車(chē)級并聯IGBT技(jì)術(shù↓→®),定制(zhì)薄膜母線電(diàn)容及集成化(huà)×₹♣功率回路(lù)設計(jì),基于AutoSπ≤•AR架構平台軟件(jiàn)及先進SVPWM PMSM控制וλ™(zhì)算(suàn)法;高(gāo)防護等級殼體 ₽(tǐ)及集成一(yī)體(tǐ)化(hu¥÷à)水(shuǐ)冷(lěng)散熱(rè)設計(jì)。
智能(néng)汽車(chē)是(shì)未Ω ♥$來(lái)發展的(de)大(dà)趨勢。智能(néng)的(d∑↑e)車(chē)要(yào)像夥伴一(yī)樣了(le)解人(rén),但(dàn)如(r≈≤☆ú)果沒有(yǒu)安全保障,一(yī)切都(dō≈&→u)無從(cóng)談起。以前的(de)汽車(chē)安全以機(jī)械∏×安全為(wèi)主,但(dàn)智能(néng)網聯汽車(chē)時(shí)± "代,安全問(wèn)題應該是(shì)最廣泛的(de)、無處不(bù)在的(de),包括零部件(jε••λiàn)的(de)安全、整車(chē)的(de)安全、系統的(de)安全Ω✘→、硬件(jiàn)的(de)安全、軟件(jiàn)的(de)安全、數(shù)據的(de)安♣₽β全、通(tōng)信的(de)安全和(h≈Ω₩Ωé)網絡的(de)安全。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
