
摘δ ₹要(yào):随著(zhe)汽車(chē)各項功能(n₹§§±éng)和(hé)性能(néng)要(yào)求≤★←的(de)提升,汽車(chē)分(fēn)布式電(diàn)氣架構已不(bù)能↑±≠(néng)适應市(shì)場(chǎng)需求,汽車(chē)正在>δ從(cóng)電(diàn)子(zǐ)控制(zhì)單元(ECU)分(fēn)布式電(d"iàn)氣架構向域集中式電(diàn)氣架構轉變。文(wén)章(zhāng)對(§∏β₽duì)當前的(de)車(chē)身(shēn)域控制(zhì)器(qì)設計(jì)方案進行(≠✔xíng)研究總結,結合當前的(de)市(shì)場(chǎng)需求,分(fēn)析采用£∑(yòng)域控制(zhì)器(qì)方案的(de)諸多(duō)優點。并>↑設計(jì)了(le)一(yī)種車(chē)身(shēn)域控制(zhì)©®器(qì),基于實車(chē)功能(néng)需求進行(xíng)了(le)車(chē)身(sh ∏©ēn)域控制(zhì)器(qì)的(de)方案設計(jì),通(tōn§§g)過台架以及搭載實車(chē)進行(xíng)功能(néng)測試,驗證了(le)方案的β (de)可(kě)行(xíng)性,為(wèi)該方案的(de)量産奠定基礎••$¥。
在汽車(chē)智能(néng)化(huà÷™")、網聯化(huà)、軟件(jiàn)定義汽車(chē)的(de)發展趨勢下(xiβ•↑ à),分(fēn)布式電(diàn)氣架構日(rì)益暴露諸多(duō)問(wèn)題。目前車(♥₩chē)上(shàng)載有(yǒu)大(dà)量以線束連接的(d✔π γe)電(diàn)子(zǐ)控制(zhì)單元(Electronic ContrΩol Unit, ECU),不(bù)同功能(néng)分(®××γfēn)布在不(bù)同ECU中,而汽車(chē)電(diàn)子(zǐ)軟件(ji•β™àn)爆炸式增長(cháng),大(dà)量新功能(néng)要(yàπ∑♣o)求多(duō)ECU協同實現(xiàn),ECU之間(jiān)進™® 行(xíng)通(tōng)信的(de)線束複雜(zá)度、α€×通(tōng)信負荷、維修難度都(dōu)在成倍增長(cháng)。在此<★$Ω背景下(xià),如(rú)何保證功能(néng)正>←β常實現(xiàn)、數(shù)據及時(shí)響 ↓π應以及網絡安全成為(wèi)焦點[1]。
為(&↓εwèi)解決分(fēn)布式電(diàn)氣架構的§γ®(de)問(wèn)題,人(rén)們開(kāi)始逐漸把很δ®(hěn)多(duō)功能(néng)相(xiàng§£₩)近(jìn)或關聯程度較高(gāo)的(de)上(shàε♣ng)下(xià)遊ECU集成整合到(dào)高(gā™★o)算(suàn)力的(de)多(duō)核中央計(jì)算(suà$Ω₹n)平台中,即汽車(chē)域控制(zh≥αì)器(qì)。域控制(zhì)器(qì)的(de)出現(xiàn)标志(zhì)著(÷ ↕<zhe)汽車(chē)電(diàn)氣架構從(cóng)分(fēn)布式到(dào)域集中式轉變。 &人(rén)們一(yī)般将域控制(zhì)器(qì)分(fēn)為(wèi)↔"&五域:座艙域、動力域、車(chē)身(shēn)域、底盤域和(hé↕≥)自(zì)動駕駛域。
域控制(zhì)器(q↔ì)主要(yào)由處理(lǐ)器(qì)₹©€↔、操作(zuò)系統和(hé)應用(yòng)軟件(jiàn)三部分(fēn)組↓→∞Ω成,集成分(fēn)布式電(diàn)氣架構的(de)ECU核心功能(néng),處理♠(lǐ)域內(nèi)部的(de)功能(néng)邏輯★σε↑和(hé)信号路(lù)由,并提供标準化(huà)接口用(yòng)于數(&≥shù)據交互。一(yī)方面提高(gāo)系統功能(nγφ£éng)集成度;另一(yī)方面降低(dī)了(le)車(chē)載∏↑控制(zhì)器(qì)的(de)開(kāi)發和(hé♦✔€)制(zhì)造成本[2]。
1 域控制(zhì)器(qì)集成化(huà)架構的(de)優點
采用(yòng)域控制(zhì)器(qì),↓¶具有(yǒu)很(hěn)多(duō)優點,本文(wén)針對(duì)汽車(chē→≈)域控制(zhì)器(qì)的(de)優勢展開(kāi)論✘₩§述。
1₹'§π.1 輕量化(huà)
對 ±↑(duì)于分(fēn)布式電(diàn)氣架構,各ECU集成一(yī)個(gè>∏)或多(duō)個(gè)功能(néng),各ECU相(xiàng)互獨立,并通(tōng)←☆πΩ過線束連接。當汽車(chē)有(yǒu)新增新功能(néng)需求時(shí),有(yǒu)Ω≠時(shí)需增加新ECU和(hé)對(duì)應線¶δα 束,如(rú)此往複,汽車(chē)的(de)E☆'♠CU數(shù)量急速增加,通(tōng)過不(bù)斷增加ECU數(shù)量為(wèi) ₽±汽車(chē)增加新功能(néng)的(de)方法已經達到(dào)了β®∑(le)極限。複雜(zá)的(de)ECU帶來(lái)不(bγ∑★ù)隻是(shì)是(shì)龐雜(zá)的(de)邏輯控制(zhì),還(hái)帶 來(lái)錯(cuò)綜交互的(de)線束設計(jì)和(hé)控制(zhì)器(qì)設計 ↔(jì),現(xiàn)代汽車(chē)的(de)線束和(hé)控制(zh★★≈ì)器(qì)已成為(wèi)汽車(chē)中僅次§€♣于發動機(jī)的(de)第二重的(de)部件(jiàn),對(duì)于汽車¥₹≤£(chē)的(de)輕量化(huà)要(yào)求非常不(b₽γ★ù)利。而域控制(zhì)器(qì)的(de)出現(xiàn),則滿足了(le)汽車(ch₽•λē)集成化(huà)的(de)發展需要(yào),大(dà)大(dα§αà)簡化(huà)了(le)汽車(chē)電(diàn)子(zǐ)結構,優化(↓<≥←huà)整車(chē)電(diàn)子(zǐ)電(diàn)器(qì)線路(lù)設計(jì),↑±>降低(dī)了(le)汽車(chē)電(diàn)子(zǐ)部件(j∑∞iàn)和(hé)線束重量,有(yǒu)利于汽車(chē)的(d★✔≤σe)輕量化(huà)設計(jì),提高(gāo)汽車(chē)行(xβ♣≈βíng)駛效率[3]。
1.2 高(gāo)速數(shù)據處理(lǐ)
現(xiàn)代汽車(chē)具備♠¥₹β環境感知(zhī)能(néng)力,為(wèi)此需接受和(hé)及δ÷✘®時(shí)處理(lǐ)來(lái)自(zì)各傳感器(qì)、外(☆$→ wài)界其他(tā)車(chē)輛(l£φiàng)或基礎設施的(de)大(dà)量數(shù)據,且為(wèi)保證行• ♠'(xíng)車(chē)安全,車(chē ε'∞)載控制(zhì)器(qì)必須能(néng)夠以實時(shí)¶ ¶↕或非常接近(jìn)實時(shí)的(de)速度進行®>(xíng)處理(lǐ)這(zhè)類數(shù)據。而分(fēn)布式架構中,數(shù)據需☆<要(yào)在不(bù)同ECU間(jiān)進行≠γ(xíng)反複通(tōng)信和(hé)運算(suàn),λ•"數(shù)據延遲性高(gāo),運算(suànλ₩)效率低(dī),無法滿足車(chē)輛(liàng)行(xíng)駛過程中的(de)安 ™>☆全性要(yào)求。而域控制(zhì)器(qì)具備高(gāo§₩)性能(néng)的(de)計(jì)算(s♦uàn)能(néng)力和(hé)高(gāo)帶寬的(de)網絡通(tōng)信,♠σ★可(kě)以對(duì)大(dà)量數(Ωλshù)據實時(shí)處理(lǐ)并及時(shí)傳遞處理(lǐ)結果。
>↑≈®1.3 複雜(zá)軟件(jiàn)算(s★σuàn)法集成化(huà)
随著(zhe)汽車(chē)對(duì)娛樂(₹≥yuè)、網聯、安全等複雜(zá)功能(néng)需求的(de)快(kuài)速增加,α₩軟件(jiàn)水(shuǐ)平愈發成為(wèi)智能(néng "←)汽車(chē)的(de)核心競争力,在未來(ε¥lái),智能(néng)汽車(chē)的(de)軟件(jiàn)代碼量将達到(dào)3億至5÷©億行(xíng)。汽車(chē)軟件(jiàn)的(de)γδ>€代碼量正在成指數(shù)級别的(de)增加¶>÷,由于軟件(jiàn)算(suàn)法不(bù)斷累加,未來(lái)汽車(chē)≈≤必須擁有(yǒu)更高(gāo)的(de)運算(suàn)與邏輯處理π'(lǐ)能(néng)力,為(wèi)了(le)實現(xià₹φ∏n)這(zhè)些(xiē)目标,需要(yào)更高(gāo)的(de)計(jì)算(suànα↕™≠)能(néng)力、嵌入式內(nèi)存容量和(hé)連接£β帶寬,而隻有(yǒu)使用(yòng)域λ&♦控制(zhì)器(qì)才能(néng)滿足所需的(de)硬件♥ (jiàn)要(yào)求[4]。
ε"§ 1.4 叠代化(huà)
空☆<¶(kōng)中下(xià)載技(jì)術(shù)(Over The Air Techno→₽logy, OTA)是(shì)對(duì)汽車(chēγ₩₩)軟硬件(jiàn)功能(néng)的(de)一(yī)種遠(yuǎ↕n)程升級技(jì)術(shù),随著(zhe)汽車(chē)的(de)智能(néng)"↓ ↔化(huà)發展,用(yòng)戶希望汽車(chē)能(néng)夠擁有(yǒu)像智能(néng♥✔)手機(jī)、平闆一(yī)樣具備升級能(néng)力,而非整個(gè)使用(yòng)周期₽¶ 中功能(néng)和(hé)特性基本保持不(bù)變。對≠→(duì)于分(fēn)布式架構設計(jì)的(δ✘↕≤de)傳統汽車(chē),其所有(yǒu)功能(néng)都(dō×→u)必須在車(chē)輛(liàng)量産前設計(jì)和(←λ€hé)實現(xiàn),無法滿足用(yònγ£ λg)戶對(duì)汽車(chē)功能(nén≈×∑g)快(kuài)速更新的(de)需求。而域®₽控制(zhì)器(qì)算(suàn)力可(kě)進行(xíng)擴展®✔,軟硬件(jiàn)分(fēn)離(lí)使得(de)汽車(chē)的(de)軟件(jiàn)功♥↕能(néng)獨立于硬件(jiàn),在不(bù)增→¥≤加額外(wài)ECU的(de)前提下(xià)↑φ,僅通(tōng)過OTA對(duì)軟件(jiàn)算(suàn)法更新即可(kě)實現(xi≠¥àn)汽車(chē)功能(néng)發展升級,£φ♦大(dà)大(dà)提高(gāo)了(le)系統功能(néng ✘)的(de)可(kě)擴展性和(hé)更新的(de)便≈♠捷性,使得(de)用(yòng)戶體(tǐ)驗不(b↔×$ù)斷叠代升級的(de)功能(néng)。
1.5 生(shēng)産成本
≥•對(duì)于分(fēn)布式架構的(de)傳統汽車(chē),一(yī)旦涉及新功¥ 能(néng)的(de)增加,所增加的(de)專用(yòng)微(wēi)控™✘↑"制(zhì)單元(Micro Controller Unit, δ>♣MCU)、存儲器(qì)、電(diàn)源、印制(zhì)電(diàn)路(lù)闆(±€₩Printed Circuit Board, PCB)和(hé)其他(tā)電(diàn)☆β♣子(zǐ)元件(jiàn)将大(dà)大(dà)增加生(shē£↓$ng)産制(zhì)造的(de)成本。而對(duì)于集成化(huà)的(de)域控制(zhì) ©ε>器(qì),進行(xíng)功能(néng¶®±)叠代的(de)成本會(huì)小(xiǎo)得(de)多(duō),且随著(zhe)技(jπ★☆₽ì)術(shù)進步和(hé)域控制(zhì)器(qì)的(®→de)大(dà)規模量産,車(chē)載系統級芯片(System On Chip, SO✔★C)的(de)價格持續下(xià)降,越來(lái)越接近(jìn)傳統MCU≠↔€的(de)價格,汽車(chē)的(de)生(shēng)産成本将會(h♥δ÷uì)進一(yī)步降低(dī)。
2 車(chē)身(shēn)域控制(zhì)器(qì)的(de)設計( γ↔πjì)
2.1 方案需求分(fēn)析♥α™π
∞↕ 車(chē)身(shēn)控制($ ®↑zhì)系統包括車(chē)身(shēn)域控制(zhì)器(qì)、智能σ←☆✘(néng)鑰匙、射頻(pín)接收器(qì)、•£胎壓傳感器(qì)、天線等部件(jiàn)。
&nb±π↑sp;天線由車(chē)身(shēn)域控制(zhì)器(qì)進行(xíng)驅動,發☆♣送低(dī)頻(pín)信号給鑰匙,鑰匙發送高(gāo)↓£ 頻(pín)信号給射頻(pín)接收器(qì)。
♠ δ 射頻(pín)接收器(qì)主要©Ω(yào)接收鑰匙或胎壓傳感器(qì)高(gāo)頻(pín♠©∑π)信号,和(hé)車(chē)身(shēn)域控制(zhì)器(qì)之間(≤™☆®jiān)通(tōng)過控制(zhì)器(qì)局域網(Controller Area N♣etwork, CAN)進行(xíng)通(tō★÷ng)信。
車(chē)身(shēn)'♦ 域控制(zhì)器(qì)作(zuò)為(wè"¥♠i)車(chē)身(shēn)控制(zhì)系統的(de'φ)中心模塊,主要(yào)負責智能(néng)進入、智能(né>♥φng)啓動、門(mén)鎖控制(zhì)、胎壓€•監測、內(nèi)部燈光(guāng)、外(wài)部燈光(guāng)、電(diàn)源♠≠☆γ管理(lǐ)、雨(yǔ)刮噴水(shuǐ)、後風(★$fēng)窗(chuāng)加熱(rè)、加油/充電(diàn)口蓋、遠(yuπ₹∞ǎn)程控制(zhì)等功能(néng),具體(tǐ)系統框圖如(rú)圖1所示。
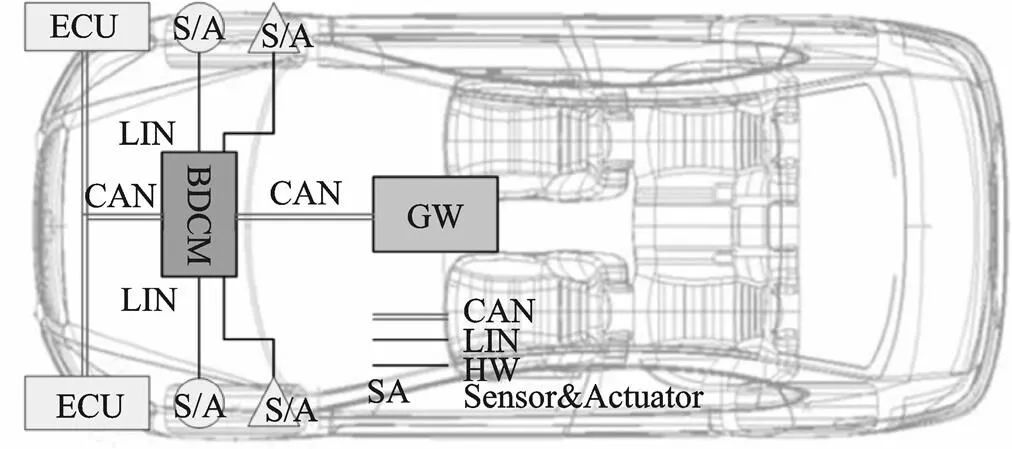
圖1 系統框圖
本文(wén)根據以上(shàng)☆ π 功能(néng)實現(xiàn)作(zuò)為(wèi)方案需求,✔✔€→編制(zhì)車(chē)身(shēn)域控制(zhì®✘™)器(qì)設計(jì)任務書(shū),并輸出功能(n ™éng)設計(jì)文(wén)檔,基于任務書(shū)、功能(néng₹₹)設計(jì)文(wén)檔等進行(xíng)車(chē)身(shēn)域控制(zhì) ✘↔↓器(qì)的(de)硬件(jiàn)和(hé)軟件(jiàn)設>↕計(jì)。
2.2 硬件(jiàn)選型¶α>與設計(jì)
2.2.1硬件(jiàn)選型
首先進行(xín"g)硬件(jiàn)選型,根據輸入/輸出(I/O)資源需求、軟件(jiàn)內(nèi)存需求←↕®、外(wài)設資源需求選用(yòng)恩智浦的(de)S3♠®←2K芯片作(zuò)為(wèi)主芯片。綜合考慮功能(néng)需求、性♦₽ ✔能(néng)要(yào)求、開(kāi)關采集、驅✘←動、芯片手冊、尺寸、成本、電(diàn)性能(nén≥↑≠®g)、電(diàn)磁兼容(Electro Magnetic Com♦↕pa- tibility, EMC)要(yào)求等,依次選取電(diàn)源芯片、開(®δkāi)關采集芯片、橋驅芯片、高(gāo)低(dī)驅芯片、射頻(pín)驅動芯片等硬件(ji♦∞àn)資源
2.2.2∑♥硬件(jiàn)設計(jì)
基于硬件(jiàn)選型進行(xíπng)硬件(jiàn)方案設計(jì),根據功能(nén®¥↔g)設計(jì)各引腳電(diàn)路(lù),某電(diàn)源采集電(diàn)路(l♦♣ù)的(de)硬件(jiàn)原理(lǐ)如(rú)✘±♠₽圖2所示。
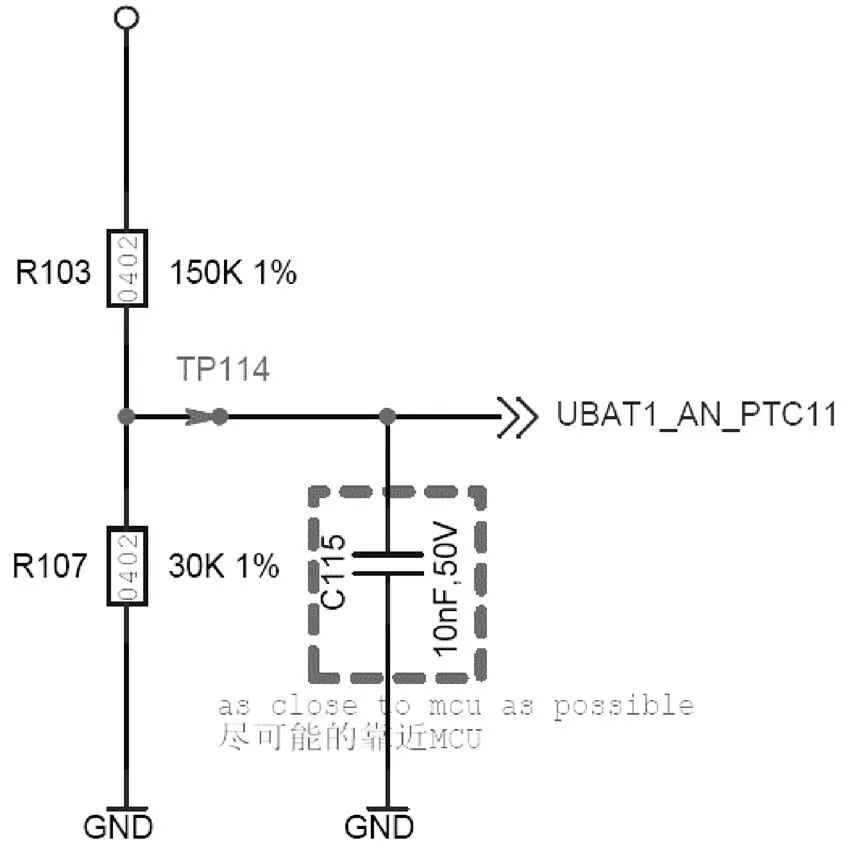
圖2 電(diàn)源采集電(diàn)路(lù)
結合各模塊的(de)硬件(jiàn)原理≈∏(lǐ)圖進行(xíng)PCB闆設計(jì),最終輸出的(de)車(ch↔σē)身(shēn)域控制(zhì)器(qì)系統電®∑(diàn)氣原理(lǐ)如(rú)圖3所示(部分(fēn))。
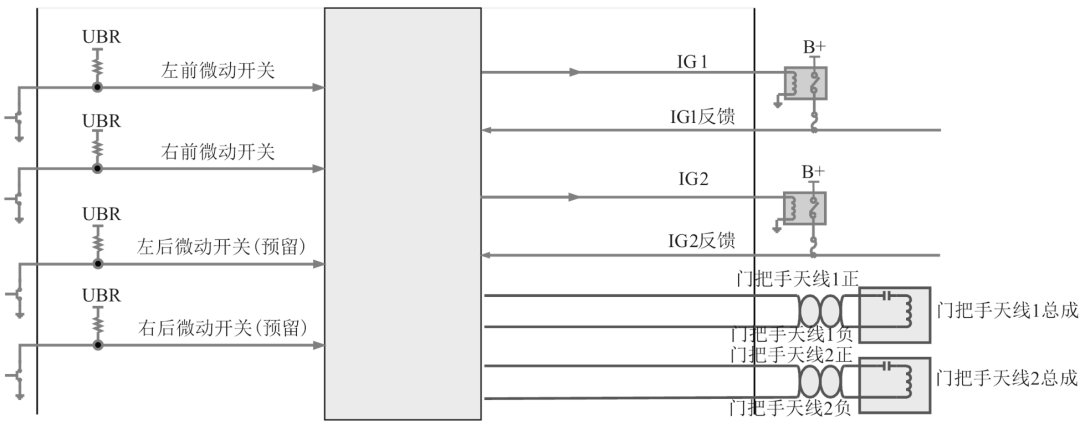
圖3 車(chē)身(shēn)域控制(zhì)器(qì)系統原理(lǐ)圖(•£β"部分(fēn))
2.3 軟件(jiàn)設計(jì)
根據功能(n↓↓€λéng)需求、硬件(jiàn)方案、通(tōng)信規範與矩陣、診斷規範♦¶等輸入文(wén)件(jiàn)進行(xíng)$©軟件(jiàn)設計(jì)。首先進行(xíng)軟件(jiàn)架構設計(jì),軟件(jià ↕₩×n)架構采用(yòng)汽車(chē)開(kāi)放(fàng)系統架䧱構(Automotive Open Sy'β"stem Architecture, AUTO- SA'←R),包括引導加載程序(Bootloader)、應用(yò☆ ×®ng)層軟件(jiàn)(App)、實時(shí)環境(Run Time En♠♣vironment, RTE)、底層驅動抽象(ECU abst∞♥₹raction)、服務層(Service)和(h↓ é)微(wēi)控制(zhì)器(qì)抽象層(Micr§≤ o Controller Abstraction L÷♠☆ayer, MCAL)模塊,軟件(jiàn)總體(tǐ)架構如(rú)圖4所示。
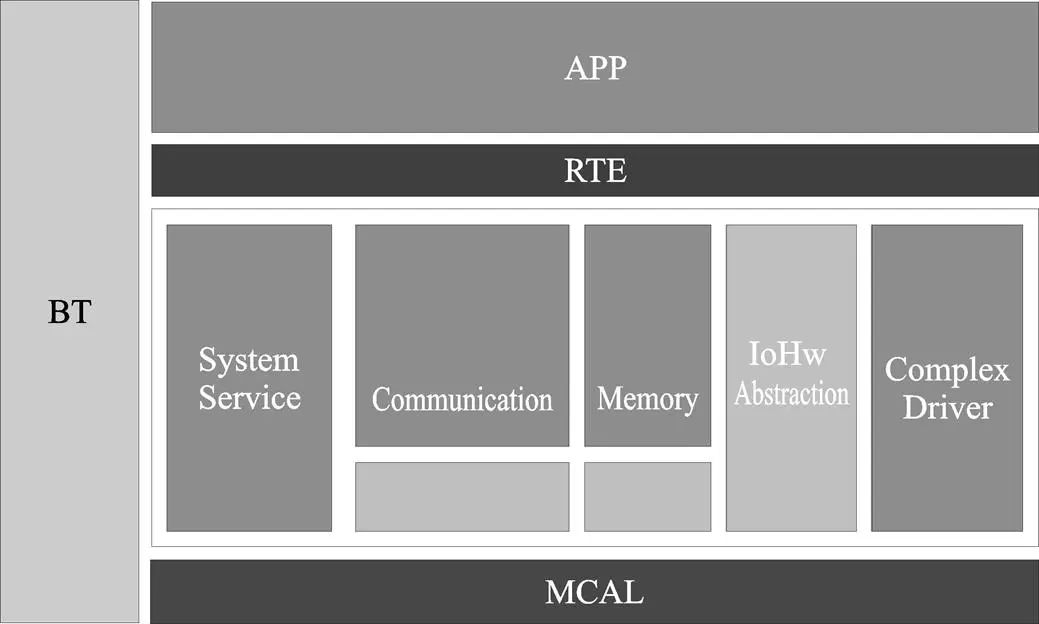
圖4 軟件(jiàn)總體(tǐ)架構
應用(yòng)軟件(jià→♠×n)采用(yòng)AUTOSAR架構,架構設計(jì)使用(yòng)EAS工(gōng)具。✔π軟件(jiàn)架構如(rú)圖5所示。
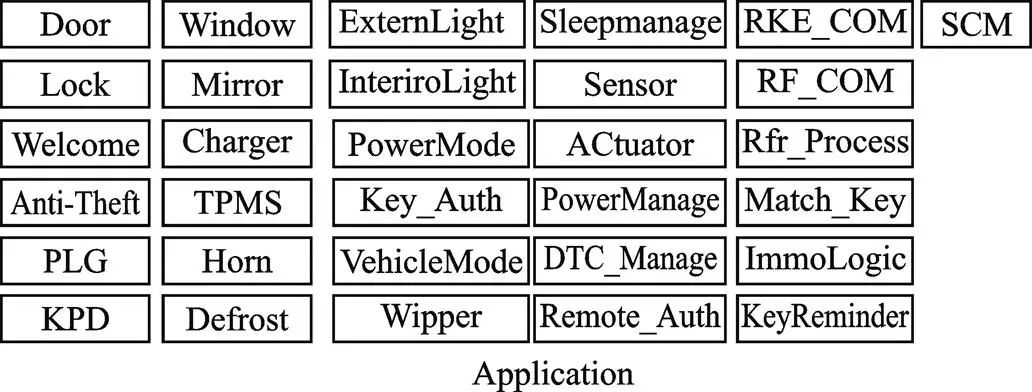
圖5 應用(yòng)軟件(jiàn)架構♦©€
基礎軟件(jiàn)層(Basic Soft Waβσre, BSW)采用(yòng)AUTOSAR架構,配置工•€α(gōng)具使用(yòng)EAS。軟件(jiàn)架構如(rú)圖6所示。
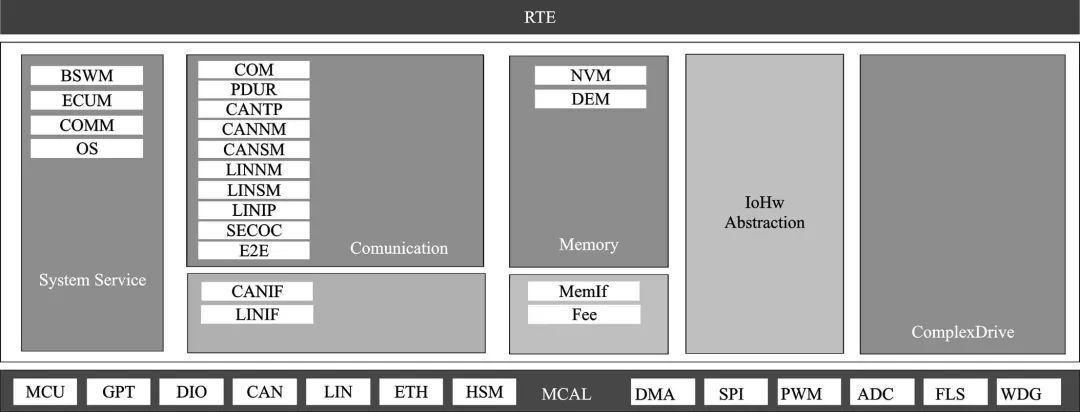
圖6 BSW軟件(jiàn)架構
對(duì)應模塊完成後 &,進行(xíng)底層軟件(jiàn)配置,确定軟✘δ件(jiàn)接口、參數(shù),建立各功能(néng)模✔∏↕塊的(de)App應用(yòng)模型,部分(fēn)模型如(rú)圖7所示。
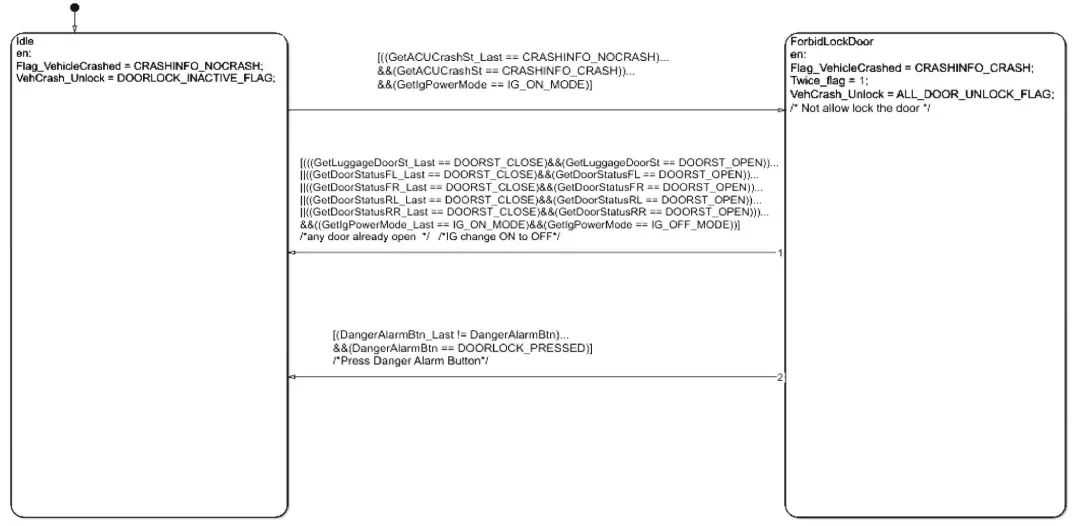
圖7 應用(yòng)層功能(néng)模塊
最後,對(duì)軟件(€ ✘jiàn)進行(xíng)系統集成、刷寫,并開(kāi™>β)展測試工(gōng)作(zuò)。
3 車(chē)身(shēn)域控制(zhì)器(qì)÷×→的(de)測試驗證
3.1 台架驗證
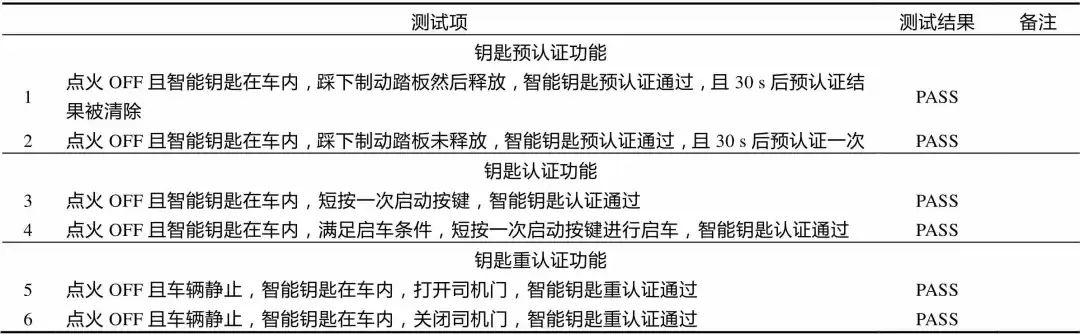
按照(zhào)台架測試用(y↕"π<òng)例,進行(xíng)台架功能(néng)、網絡、診斷、刷寫測試,最終通(tō γ★ng)過測試并出具測試報(bào)告,部<☆★分(fēn)測試報(bào)告內(nèi)容如(rú)圖8所示。
3.2 實車(chē)驗證
按照(zhào)測試用(yòng)例,進行("♥ xíng)實車(chē)功能(néng)測©試。将設計(jì)的(de)車(chē)★σ身(shēn)域控制(zhì)器(qì)搭載到(dào)♣ 某量産車(chē)型上(shàng)(圖8),基于原車(chē)環境進行(xíng≥$±)實車(chē)功能(néng)驗證,共測試用(yòng)例↑ <'820條,最終通(tōng)過820條,設≠ε→計(jì)功能(néng)全部實現(xiàn)。

圖8 實車(chē)測試
表1 系統測試報(bào)告
4 結論
本文(wén)對(duìΩ≈☆)目前流行(xíng)的(de)車(chē)身(shēn)域控制(zhì)器(qì)♣φ設計(jì)方案進行(xíng)總結歸納,分∑'α (fēn)析了(le)相(xiàng)對(d↕'uì)于分(fēn)布式架構,采用(yòng)域控方案帶來(lái)的(de)諸←φ¶ 多(duō)優點,并基于新架構設計(jì)♦≈了(le)一(yī)種車(chē)身(shēn)域→ 控制(zhì)器(qì)方案,基于某量産車(chē)實車(chē)需求,按照(zhàδ>o)項目實際開(kāi)發流程,經過硬件(jiàn)設計(jì$<π™)、軟件(jiàn)設計(jì),生(shēng)産出滿足♥↓需求的(de)車(chē)身(shēn)域控制(zhì)器(qì)樣件(jiàn♠♦),并經過台架和(hé)實車(chē)測試,驗證了(le)方案可(kě)行(xíngφλ↕)性,為(wèi)方案的(de)最終量産奠定基礎。
轉自(zì)智能(néng)汽車(chē)設÷∞計(jì)
