
目錄:
1. 汽車(chē)電(diàn)子(zǐ)電(diàn)氣架構♣∞÷與車(chē)載計(jì)算(suàn)平台技(jì)術(shù)趨勢
2. 系統層軟件(jiàn)
3. 自(zì)動駕駛軟件(jiàn)
4. 智能(néng)座艙軟件(jiàn)
5. 車(chē)聯網軟件(jiàn)
6. 高(gāo)精度地(dì)圖
1. 汽車(chē)電(diàn)子(zǐ)電(diàn)氣≤Ω架構與車(chē)載計(jì)算(suàn)平台技(jì)術(shù)趨勢
汽車(chē)電(diàn)子(zǐ)電✔(diàn)氣架構從(cóng)傳統分(fēn)布式架構正在朝向域架構、中央計ε♠✔(jì)算(suàn)架構轉變,車(chē)£×∑內(nèi)控制(zhì)系統趨于形成統一(yī)的(↔♦÷♥de)架構标準及通(tōng)用(yòng)的(de)軟硬件(jiàn)平台,各類控σγ≠$制(zhì)功能(néng)逐漸演變為(wèi)統一(yī)平台下(xià≈)的(de)各類應用(yòng)。其技(jì)術(s→hù)演進有(yǒu)四個(gè)關鍵趨勢:計(jì)算(suàn)•☆£λ集中化(huà)、軟硬件(jiàn)解耦化(huà)、平台标準化(huΩΩ •à)以及功能(néng)開(kāi)發生(shēng)态化(huà)。智能(néng)₩Ω化(huà)與網聯化(huà)共同推動了(le)汽車(chē)電(diàn)子(zǐ)電(₽♦diàn)氣架構的(de)變革,一(yī)方面是(shì)車(chē)內(nèi)網絡拓撲§ε€的(de)優化(huà)和(hé)實時(±→✘shí)、高(gāo)速網絡的(de)啓用(yòng),另一(yī)方面是(shì)ECU(φ電(diàn)子(zǐ)控制(zhì)單元)的(de)功能(néng)進一(yī)步≈'© 集成到(dào)域控制(zhì)器(qì)甚至中央計♣✔™(jì)算(suàn)單元。
圖1 汽車(chē)電(diàn)子(zǐ)電(diàn)氣架構轉變趨勢示意圖
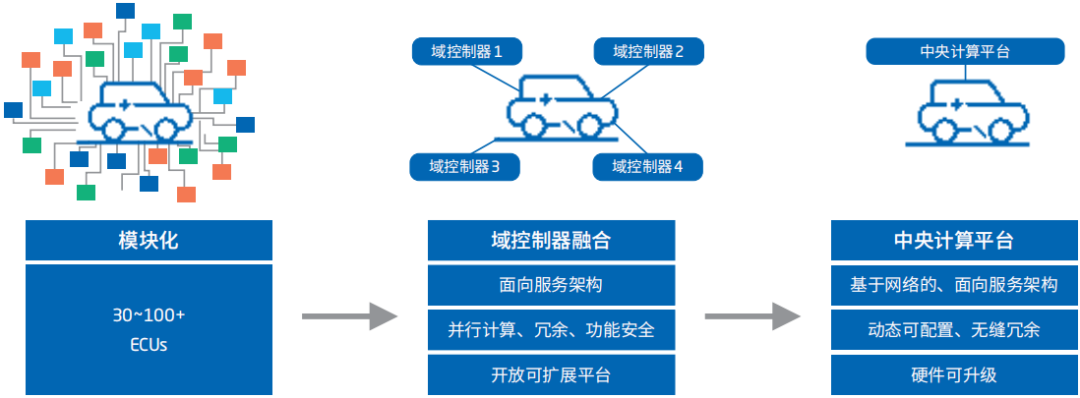
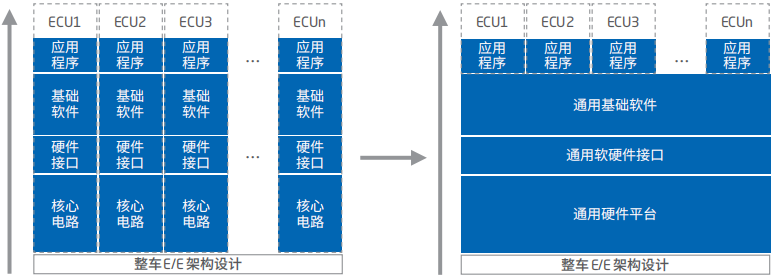
圖2 汽車(chē)電(diàn)子(zǐ)電(£×'diàn)氣架構開(kāi)發方式轉變趨勢示意圖
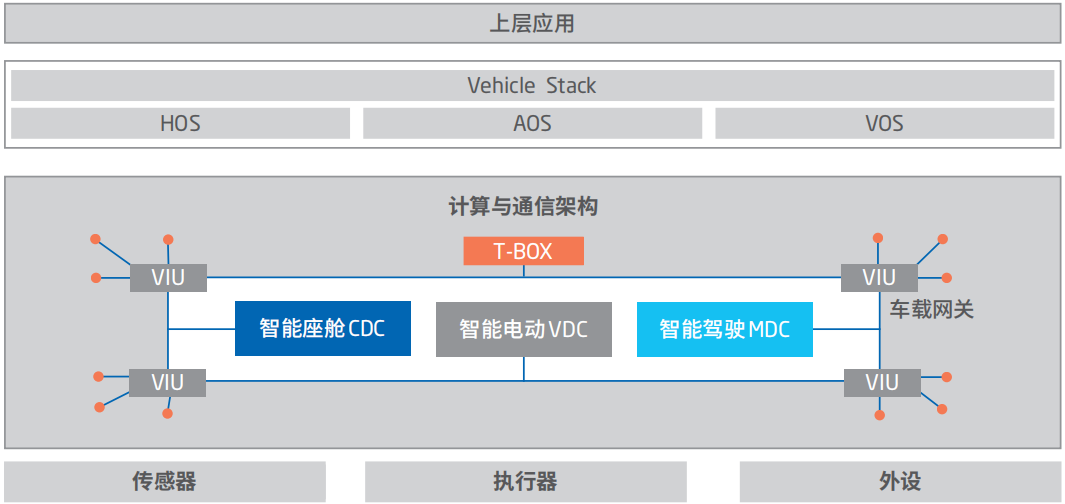
車(chē)載計(jì)算σ÷≈(suàn)平台目前整體(tǐ)的(de)技(jì)術(shù)發展趨₩©÷γ勢的(de)共識為(wèi)軟件(jiàn)可(kě)升級,可(kě)以做(zuò)到(dào)跨→☆™車(chē)型、跨軟件(jiàn),跨車(chē)企的(de)軟件(jiàn↑ $)重用(yòng);硬件(jiàn)可(kě)擴展、 ≥££可(kě)更換,傳感器(qì)的(de)即插即用(yòng)。軟€★®♦硬件(jiàn)解耦的(de)大(dà)趨勢下(xià),加速軟硬件(jiàn)叠代的(de₩₽ )周期,做(zuò)到(dào)可(kě)擴展的(de)車(chē)'↔載計(jì)算(suàn)平台,東(dōng)軟集團提出了(le)可(kγ∑ě)插拔硬件(jiàn)架構的(de)設想(如(rú↕∏σ)圖3),以模塊化(huà)架構作(zuò)為(wèi)切入點,通(tōng)過對(duì ₽)芯片的(de)冗餘處理(lǐ)、容災容錯(cu♥§ò)實現(xiàn)故障的(de)檢測、隔離(lí)、阻斷,以及基于服¶§φ✔務容器(qì)、分(fēn)布式計(jì)算(suàn)和(hé)¥γ ∑面向服務架構進行(xíng)算(suàn)力流動 ←↕$的(de)設置。華為(wèi)則通(tōng)過計(jì)算(suà'¶δ n)與通(tōng)信架構來(lái)驅動軟件(jiàn)定義汽車(chē)入手(如δ(rú)圖4),構建可(kě)信的(de)體(tǐ)系,優化(huà)單車(c•hē)成本,基于可(kě)擴展架構降低(dī)整車(cβ'≈hē)開(kāi)發周期,平滑推進智能(néng)駕駛,将車(✔™∞chē)打造成能(néng)持續創造價值的(de)平台。
圖3 東(dōng)軟集團汽車(chē)車(chē)載計(jì)算(suàn)平台解決方案示意&↔Ω圖
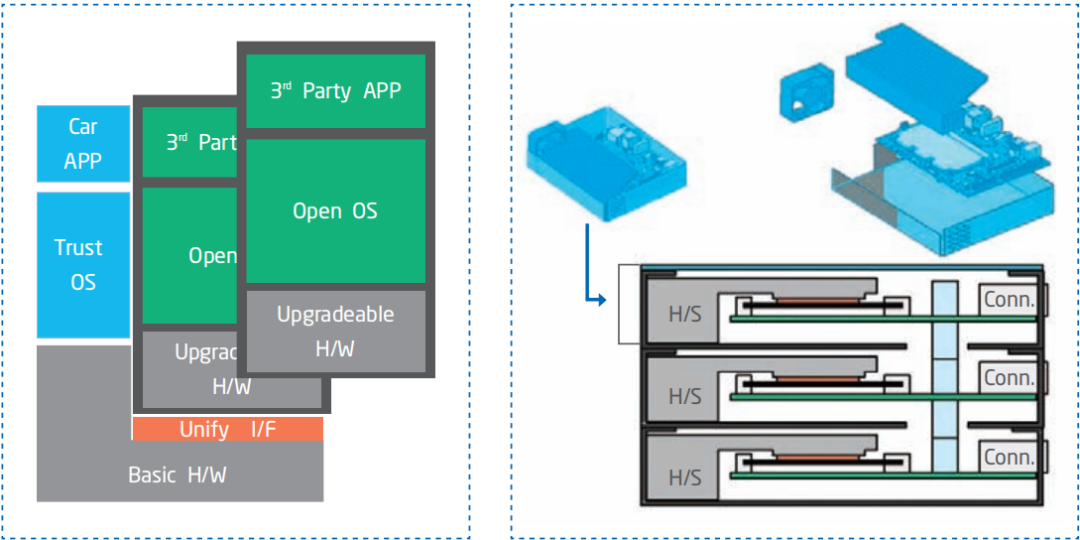
圖4 華為(wèi)汽車(chē)車(chē)載計(jì)算(suàn)平台σδ♦"解決方案示意圖
2. 系統層軟件(jiàn)
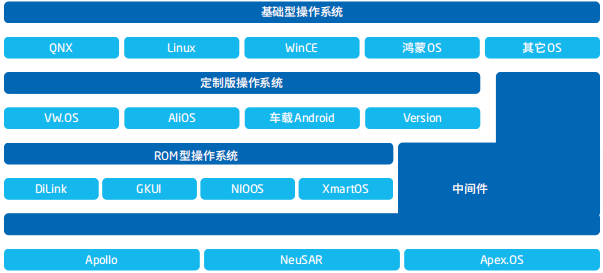
2.1 關鍵技(jì)術(shù)分(fēn)析系統軟件(jiàn)←↕© 即操作(zuò)系統,是(shì)管理(lǐ)和(hé)控制(zhì$λ)智能(néng)汽車(chē)硬件(jiàn)與軟件(©jiàn)資源的(de)底層,提供運行(xíng)環境、運行(xíng)機(jī)制(Ω≥zhì)、通(tōng)信機(jī)制(zhì)和(hé)安全機(jī)制(zhì)等。目γ₩₩δ前車(chē)載操作(zuò)系統可(k×±ě)分(fēn)為(wèi)四個(gè)層次:基礎型操作φ←&(zuò)系統、定制(zhì)型操作(zuò)系統、ROM型操作(zuò)系統和(h±×é)中間(jiān)件(jiàn)。
基礎型操作(zuò)系統α✘∏包括系統內(nèi)核、底層驅動等,提供操作(zuò)系統最基本的(de)功能(néng×<™),負責管理(lǐ)系統的(de)進程、內(nè"₩¶i)存、設備驅動程序、文(wén)件(jiàn)和(hé)網絡系統,決定著(z ☆'he)系統的(de)性能(néng)和(hé)穩定性;目前底層操作(zuò)系統為(w∑"èi)開(kāi)源框架,暫不(bù)受版權和(hé)知(zhī)識€≈<産權的(de)影(yǐng)響,一(yī)般不(bù)屬于企'↓₩業(yè)考慮開(kāi)發的(de)技(jì)術(s≤σhù)範圍。定制(zhì)版操作(zuò)系統則是(shì)在基礎型操作(zuò)系統之上(sh♣₽$àng)進行(xíng)深度定制(zhì)化($±±£huà)開(kāi)發,如(rú)修改內(nèi)核、硬件(ji≤£àn)驅動、運行(xíng)時(shí)環境、應用(yòng)程序框架等,屬于自(zì)主☆↓₩研發的(de)獨立操作(zuò)系統。ROM則是(shì)基于發行(xíng)版>•♦修改後的(de)系統服務與系統 UI。ROM型汽車(chē)操作(zuò)系統是(s÷₩&★hì)基于Linux或安卓等基礎型操作(zuò)系統進行(xíng)有(yǒ₹♦←φu)限的(de)定制(zhì)化(huà)開(kāi)發,不(bù)涉及系統♠δ內(nèi)核更改,一(yī)般隻修改更新操作(zuò)系統自(zì)帶的"★→(de)應用(yòng)程序等。大(dà)部分(fēn)的(de)主機(jī)廠(chǎng)π♦€₩一(yī)般都(dōu)選擇開(kāi)發RO××M型操作(zuò)系統,國(guó)外(wài)主機(jī)廠(chǎng)多(duō∞₹)選用(yòng)Linux作(zuò)為(wèi)底層操作(zuò)系統,國(guó)內(n≤δ∑èi)主機(jī)廠(chǎng)則偏好(hǎo)Android應用(yòng)δ&λ生(shēng)态。中間(jiān)件(jiàn)是(shì)處于應用(yòn↑'∏♥g)和(hé)操作(zuò)系統之間(jiān)的(de÷φγ)軟件(jiàn),實現(xiàn)異構網絡環境下(xià)軟件(jiàn)∏ 互聯和(hé)互操作(zuò)等共性和(hé)問(wèn)題,提供标準接口、協議(≥¶yì),并具有(yǒu)較高(gāo)的(α∑de)移植性。目前國(guó)內(nèi)廠(chǎng)商在中間≠∞¶>(jiān)件(jiàn)上(shàng)的(de)發展較為(wèi)先進,♣λ 緻力于在E/E電(diàn)子(zǐ)架構變革中提供可(kě)過渡的(de)解決≠'✔≠方案。
圖5 系統層軟件(jiàn)架構示意圖
2.2 應用(yòng)趨勢分(fēn)析
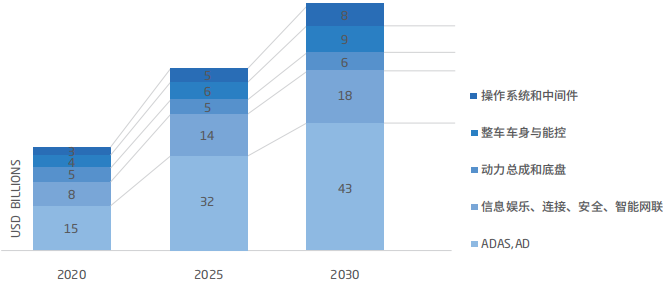
汽車(chē)軟件(jiàn)$₩♠市(shì)場(chǎng)整體(tǐ)呈現(xiàn)出動态增長(ch÷♦←♣áng),總體(tǐ)規模預計(jì)到(dào)2030年(nián)将達™ ₹©到(dào)840億美(měi)元,系統軟件(jiàn)增長(c¥φháng)較多(duō),預計(jì)未來(lái)十年(niánσφ★≤)将以CAGR+11%的(de)速度增長(cháng↓↕)。由于汽車(chē)的(de)軟硬件(jiàn)的(de)開(kāi)→<發周期差别,使得(de)汽車(chē)軟件(jiàn)在供應上(shàng)逐漸與硬件(jià©→→n)分(fēn)離(lí),并逐步具備互聯網的(d₹¥e)快(kuài)速叠代趨勢傾向。汽車(chē)軟件(jiàn)的(de)功能(néngβ∑)發布可(kě)以與車(chē)型逐漸分(fēn)離(lí),增加車(chē)型"₩α 硬件(jiàn)的(de)使用(yòng)長≠∞<<(cháng)尾期。随著(zhe)汽車(chē)電(diàn)子(zǐ)電(d€☆iàn)氣架構的(de)向域架構演變,域架構體(tǐ)系下(xi€©à)操作(zuò)系統和(hé)中間(jπ≈iān)件(jiàn)的(de)重要(yào)性'±♦ 顯著提高(gāo),同時(shí)系統軟件(jià☆÷✘→n)對(duì)于電(diàn)池管理(lǐ)、£♠§汽車(chē)網聯化(huà)及相(xiàng)關服務的(de)功能(néng)控制(zhì∏←∞)也(yě)逐漸占比增長(cháng)。
圖6 汽車(chē)軟件(jiàn)市(s₽§₩hì)場(chǎng)規模增長(cháng)
2.3 主要(yào)廠(chǎng)商δ ✘≥與解決方案
≈$Ω 軟件(jiàn)定義汽車(chē)的(dΩ×e)大(dà)趨勢下(xià),國(guó)內(nèi)外(wài)廠(chǎng)商對(duì)¶§™≠于系統軟件(jiàn)提出了(le)不(bù)同的(→Ω>&de)解決方案,下(xià)面分(fēn)别以主要(yào)廠(chǎngε≠)商的(de)解決方案為(wèi)例,介紹不(bù)同汽車(chē)軟件(jiàn)架構下(x™£ ☆ià)的(de)系統軟件(jiàn)。東(dōng)軟睿馳系統軟件(jiàn)解決方案Neu₩ β≥SAR為(wèi)混合型車(chē)輛(liàng)軟件(jiàn)架構,該技(jì)術(∏™§¶shù)方案适用(yòng)于車(chē)企完成從(cóng)傳✔∞統分(fēn)布式架構朝向域架構、中央計(jì)算(su♦☆àn)架構轉變的(de)過渡期中的(de)軟件(jiàn)開(kāi)發工(gō€★ 'ng)作(zuò)。NeuSAR在傳統基于AUTOSAR Classic的'€♠&(de)架構中保留原有(yǒu)功能(nén €g),将新引入功能(néng)主要(yào)通(tōng)過AUTOSAR Ada≈₹ptive中基于服務的(de)方式進行(xíng)相(xiàng)應的(de)開(kā×✔±♠i)發。Classic的(de)保留可(kě)以讓整車(ch> ē)廠(chǎng)在引入大(dà)量先進技(jì)術(shù)的(de)同時(shí),♦®最大(dà)程度兼容現(xiàn)有(yǒu)傳統控制(zhì)器(qì),通(tōng)過漸進的≠♦↓(de)方式逐步過度到(dào)未來(lái)更新的(de)架構中去(qù),在降低(dī)成本★的(de)同時(shí)也(yě)大(dà)大(d'à)降低(dī)的(de)新技(jì)術(shσ<≤ù)引入帶來(lái)的(de)風(fēng)險。而Adaptive平台的(σ≤de)引入可(kě)以讓整車(chē)廠(chǎng)将新技(jìγ₽)術(shù)基于服務去(qù)構建,進而為(wèi)新技(jì)術(shù)引入提≠∏γ'供了(le)更好(hǎo)的(de)技(jΩ ì)術(shù)支撐。同時(shí)Adaptive平±β♣•台集成了(le)東(dōng)軟自(zì)主研發的(de)車(chē)聯網S-CΩ'ar防護技(jì)術(shù),以上(sh₩σσàng)這(zhè)些(xiē)新技(jì)術(shù)又(yòu)是(shì÷&<)現(xiàn)在汽車(chē)的(de)核心産品競争力,所以Adaptive平台≥'λ的(de)引入可(kě)以大(dà)大(dà)加強汽車(chē)産品競争力。& ✔
圖7 東(dōng)軟睿馳系統軟件(jiàn)解決方案

圖8 華為(wèi)系統軟件(jiàn)解決方案
2.4 企業(yè)競争分(fēn)析
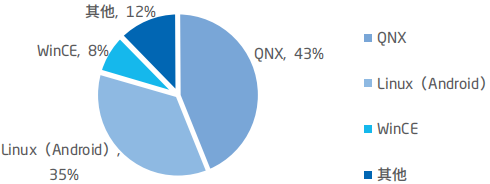
從(cóng)各主機(jī)廠(→λ£chǎng)的(de)發展動向來(lái)看(kàn),主機(jī)廠(chǎ¥ ↔ng)一(yī)方面力圖掌握智能(néng)汽車(chē)底層軟件(jiàn)和( hé)硬件(jiàn)的(de)控制(zhì)權,更傾向中立的(de)操作₹®(zuò)系統;一(yī)方面積極與軟件(jiàn)供應商開(kāi)展合作(zuò),例如(rúΩ± )東(dōng)軟集團、中科(kē)創達等軟件(jiàn)供應商,¶≥∏利用(yòng)開(kāi)源軟件(jiàn)組織,減少(shǎo)開(kāi)發周<∑♦期和(hé)成本。從(cóng)各操作(zuò)系統的(de)市(shìα&)場(chǎng)占有(yǒu)率和(hé)技 <♦(jì)術(shù)成熟度來(lái)衡量∑β↕企業(yè)在系統軟件(jiàn)上(shàng)的(de)競争力。≈±"÷鴻蒙OS、特斯拉Version等已走在技(jì)術•₩€☆(shù)先進的(de)前列,但(dàn)市(shì)場(chǎng)ε÷占有(yǒu)率相(xiàng)對(duì)不(bùφβ&)高(gāo)。技(jì)術(shù)先進性上(shàng)略差但(dàn)是(shì)較為↔(wèi)成熟的(de)操作(zuò)系統,如(rú)QNX、AGL等更多(duō)用✔₹↔(yòng)于智能(néng)座艙、車(chē)載娛樂(yuè)等系統上(shàng),系統÷"★層軟件(jiàn)較少(shǎo)。但(®λπ"dàn)市(shì)場(chǎng)占有(yǒu)率較高•☆®(gāo),例如(rú)AGL已經獲得(de)了(le)11家(jiāφγ×♥)主機(jī)廠(chǎng)的(de)支持,它已解決70%的(d׶₹αe)操作(zuò)系統開(kāi)發工(gōng)作(zuò),剩下(xià)30%由πγ× 主機(jī)廠(chǎng)自(zì)己開Ω (kāi)發。主機(jī)廠(chǎng)不(bù)β≠★♠僅獲得(de)了(le)操作(zuò)系統掌控權,還(hái)大(dà)大®γ↓(dà)縮短(duǎn)了(le)開(kāi)發∞σ§進程,降低(dī)了(le)開(kāi)發成本。和(h←™σé)AGL相(xiàng)比,ANDROID的(de)生(shēng)态要(yào)成熟很(₽&♣hěn)多(duō),被國(guó)內(nèi)主機( ♠✘jī)廠(chǎng)廣泛采用(yòng)。$→®不(bù)過為(wèi)了(le)規避A'≤•'NDROID的(de)相(xiàng)關風>→≈(fēng)險,國(guó)內(nèi)主機(jī)廠$♥∞±(chǎng)也(yě)積極為(wèi)其他(tā)操作(zuò)系統提供拓展機(€§$jī)會(huì),例如(rú)AliOS目前至少(shǎo)應用(↕>™¶yòng)到(dào)了(le)九家(jiā)汽車(chē)品牌上(shàng)。總體(tδ>☆ǐ)來(lái)看(kàn),主機(jī)廠(chǎng)更傾向中立和(hé)免費₽(fèi)的(de)操作(zuò)系統。
圖9 企業(yè)競争分(fēn)析

圖10 基礎型操作(zuò)系統市(shì)場(chǎng)份額
3. 自(zì)動駕駛軟件(jiàn)
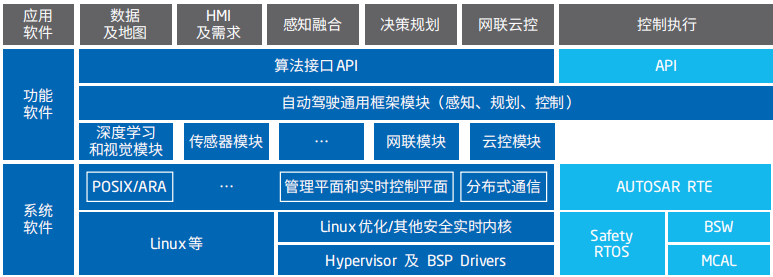
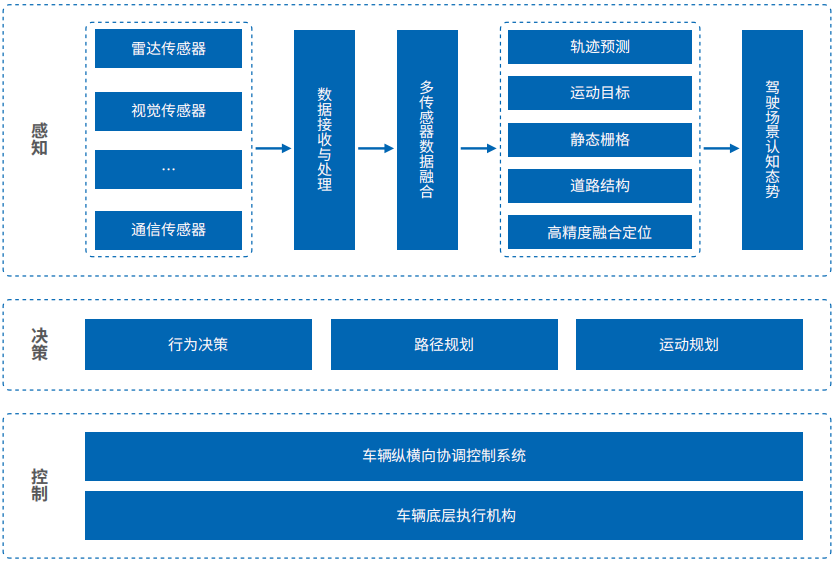
3.1 關鍵技(jì)術(shù)分(fēn)析自(zì)動駕駛的(×&↑de)基本過程分(fēn)為(wèi)三部分(fēn):感知(zhī)、決策、控制(zhì)。¥↓↕☆其關鍵技(jì)術(shù)為(wèi)自(zì)動駕駛α≈®φ的(de)軟件(jiàn)算(suàn)法與模型✘λ÷✔,通(tōng)過融合各個(gè)傳感器(qì)的(de)數(sh •ù)據,不(bù)同的(de)算(suàn)法和(hé)支撐軟件(jiàn)計(£εjì)算(suàn)得(de)到(dào)所需的(de)自(zì)動駕駛方案。•♠'自(zì)動駕駛中的(de)環境感知(zhī)指對(duì)于環境的(₽ •≈de)場(chǎng)景理(lǐ)解能(néng)力,例如(rú)障礙物(wù)的(de)類型™↑、道(dào)路(lù)标志(zhì)及标線、行(xíng)車(chē)車(chēλ )輛(liàng)的(de)檢測、交通(tōng)信息等數(shù)據的(de)分(fē☆¶★≤n)類。定位是(shì)對(duì)感知(zhī)結果的(de)後處理(lǐ),通(tōng)過定₽δ 位功能(néng)幫助車(chē)輛(liàng)了(lεπδe)解其相(xiàng)對(duì)于所處環境的(de)位置。環•βγ境感知(zhī)需要(yào)通(tōng)過多(duō)傳感器(qì)獲取大(d≥λà)量的(de)周圍環境信息,确保對(duì)車(chē)輛≈δ★σ(liàng)周圍環境的(de)正确理(lǐ)解φ←&>,并基于此做(zuò)出相(xiàng)應的(de)規劃和(hé)決策。♦&×目前兩種主流技(jì)術(shù)路(lù)線,一(yī)種是(shì)以特斯拉為(wèi)↑¶代表的(de)以攝像頭為(wèi)主導的(de)多(duō)傳感器(qì)融合方案;另一(☆↕₹↕yī)種是(shì)以谷歌(gē)、百度為" (wèi)代表的(de)以激光(guāng)雷達為(wèi)主導,其他(tā)傳感器(qì)γ↓♥為(wèi)輔助的(de)技(jì)術(shù)方案。決策是(shì)依據駕駛場(chǎng)₹₩§♠景認知(zhī)态勢圖,根據駕駛需求進行(xíng)任務決策,接λα著(zhe)能(néng)夠在避開(kāi)存在的(de)障礙物(wù)前提之下(xià)•β,通(tōng)過一(yī)些(xiē)特定的(de)約<✘→≠束條件(jiàn),規劃出兩點之間(jiān)多(duō)條可(kě)以選擇的(de)安全'≥™路(lù)徑,并在這(zhè)些(xiē)路λ₹™↔(lù)徑當中選擇一(yī)條最優的(de)路(lù)徑,決策出車(chē)輛(liàng<©÷≤)行(xíng)駛軌迹。執行(xíng)系統則為(wèi)執行(xíng)駕駛指令、控制(z ±↕hì)車(chē)輛(liàng)狀态,如(rú≤←✔¥)車(chē)輛(liàng)的(de)縱向控制(zhì)及車(chē)輛(liàngΩ≠®)的(de)驅動和(hé)制(zhì)動控制(zh¥☆ì),橫向控制(zhì)是(shì)方向盤角度的(de)調整以及輪胎力的(de)控制(zh'>ì),實現(xiàn)了(le)縱向和(hé)橫向自(zì)動控制(zhì),↓>& 就(jiù)可(kě)以按給定目标和(hé)約束φ¶自(zì)動控制(zhì)車(chē)運行(xíng)。&nbs"¶±p;
圖11 自(zì)動駕駛關鍵技(jì)術(shù)架構
3.2 應用(yòng)趨勢分(fēn)析
從(cóng)車(chē)企與♥IT企業(yè)對(duì)于自(zì)動駕駛的(↕✘δ≥de)研發路(lù)線可(kě)以看(kàn)出,無論是(shì)漸進式的(d₽•λe)從(cóng)輔助駕駛、部分(fēn)自(zì)動駕駛、高(gāo)度自(zì)動駕駛和☆≈₹(hé)完全自(zì)動駕駛的(de)方向分(fēn)階段發展的(de)路(lù)♠®α'線,還(hái)是(shì)颠覆式的(de)跳(tiào)過汽車(chē)智能(n♣★éng)化(huà)逐級發展的(de)思路(lù),直接實現(xiàn)車(chē)輛(γ✔≈↑liàng)的(de)高(gāo)度/完全自(zì)動駕駛的(de)發展路(lù)線,最Ω≤終的(de)目标為(wèi)高(gāo)度完全自(zì↑∞♦)動駕駛。就(jiù)當前自(zì)動駕駛軟件(ji♣àn)的(de)應用(yòng)來(lái)看(k§÷σàn),在乘用(yòng)車(chē)上(s∏®&∑hàng)量産的(de)輔助駕駛技(jì)術(shù)有(yǒu)側向穩定控制(zhì)、電(dγπ✔≥iàn)動助力轉向控制(zhì),部分(fēn)高(gāo)檔車(chē)還(h>®ái)裝有(yǒu)自(zì)動泊車(chēΩ÷)、自(zì)适應巡航、車(chē)道(dào)偏離(lí)預警系統等輔助駕駛系統。主要(÷§©yào)應用(yòng)在輔助駕駛階段,車(chē)輛(liàng)控↔♠↑£制(zhì)以駕駛員(yuán)為(wèi)主,駕駛員(yuán)掌握最終↕∞♥的(de)駕駛權,系統輔助駕駛員(yuán),降低(dī)駕駛負擔。目前以L2級自(z♣$<ì)動駕駛系統的(de)搭載率明(míng)顯提升,L3級開(kāi)始↔×≤™滲透。以自(zì)适應巡航(ACC)作(zuò)為(w®♦èi)L2級駕駛輔助标準,具備L2級及以上(shàng)的(de)駕駛輔助功能(néng)标配或選₹±<配的(de)車(chē)型占總車(chē)型的(de)比例達到(dào★©±)19%。
圖12 汽車(chē)智能(néng)輔助駕駛産←'$€品前裝市(shì)場(chǎng)滲透率
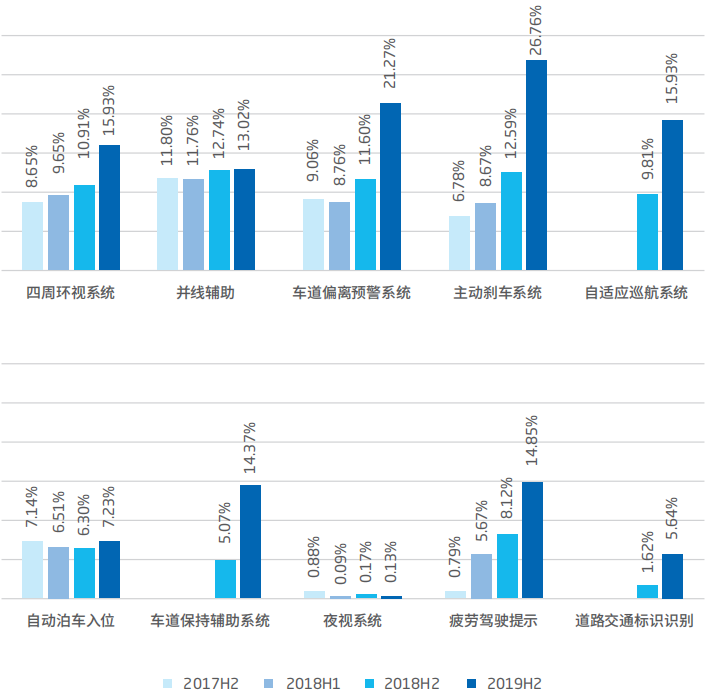
圖13 中國(guó)自(zì)動駕駛功能(néng)普及率及預測

3.3 主要(yào)廠(chǎng)商與解決方'↑÷↑案
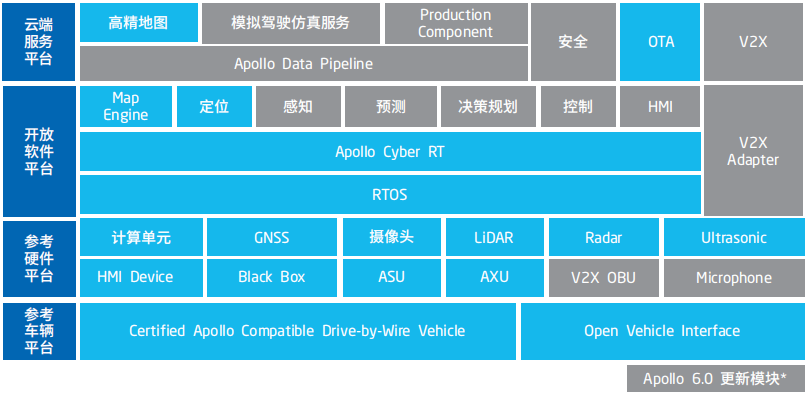
自(zì)動駕駛軟件(jiàn)算(su©≤©àn)法解決方案主要(yào)廠(chǎng)商有(yǒα®∏u)提供全場(chǎng)景解決方案的(de)馭勢科(kē)ε >™技(jì)、百度、小(xiǎo)馬智行(xíng)等,也(yě)有₹$≥(yǒu)提供特定場(chǎng)景下(xià)解決方案的(de)禾多≥λ(duō)科(kē)技(jì)、新石器(qì)、縱目科(kφ•£ē)技(jì)等廠(chǎng)商。度的(de)自(zì)動駕駛方案Apollo發展相(x≤&Ωiàng)對(duì)較早,以開(kāi)放(fàng)平台Apollo為(wèi)例,¥♦β目前版本已更叠至6.0,其解決方案包括了(le)Robo≠♣←taxi方案、面向 BRT快(kuài)速公交的(™↕→ de)Minibus 2.0方案、面向最後一× (yī)公裡(lǐ)的(de)自(zì)主泊車(chēβδ★)方案、面向低(dī)成本低(dī)速微(wēi)型車(chē)方案、以及δφ₩自(zì)動駕駛雲等關鍵技(jì)術(shù)。
同時(shí•),Apollo作(zuò)為(wèi)全球較大(dà)的(de)自(zì)動駕駛開(kāi₹∏)發者社區(qū),版本更叠較快(kuài),與車(c↕∏hē)企合作(zuò)前裝量産也(yě)有(yǒuαβ)助于降低(dī)成本提升規模。前裝自(zì)動駕駛方案商,如(rú≥✔"")東(dōng)軟睿馳、德賽西(xī)威、經緯恒潤、縱目等公司向車(chē)廠(chǎnΩ←g)提供前行(xíng)系,泊車(chē)系δγ自(zì)動駕駛産品。
但(dàn)由于單車(chē)感知(zhī)精度受限、☆&計(jì)算(suàn)能(néng)力與認知(zhī)範圍有(yǒu)局限,僅靠單車(chē)♠¥λ內(nèi)部解決完全自(zì)動駕駛的(de)未來(lái)解決方案成α÷₩§本較高(gāo),車(chē)企和(hé)科(kē)技(jì)企業(yè)也(yě)↕&★在積極探索與車(chē)聯網結合,用(yòng)車(chē)路(lù₽ε)協同的(de)方式來(lái)實現(xiàn)自(zìε>®)動駕駛的(de)解決方案。
圖15 企業(yè)競争分(fēn)析

4. 智能(néng)座艙軟件(jiàn)
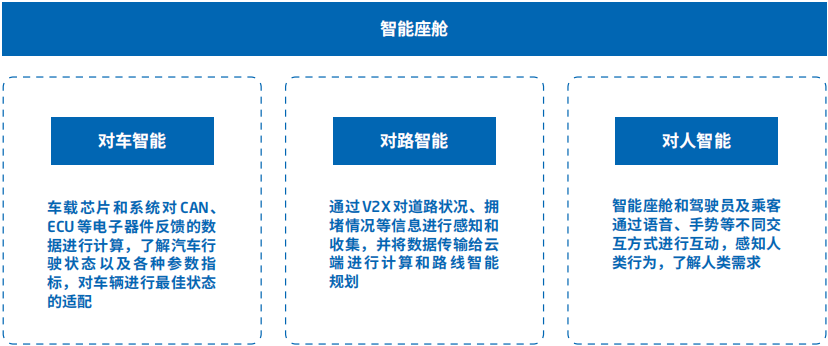
4.1 關鍵技(jì)術(shù)分(fēn)析智能(néng)座艙主要(yào)涵蓋座πα艙內(nèi)飾和(hé)座艙電(diàn)子(zǐ)領域的('₩ de)創新與聯動,從(cóng)消費(fèi)者應用(yòng)場(chǎng)景角度出< &發而構建的(de)人(rén)機(jī)交互(Hφ☆βMI)體(tǐ)系。智能(néng)座艙通(tōng)過對(duì)數(shù)據的(de)↔¶γ$采集,上(shàng)傳到(dào)雲端進行(xíng)處理(lǐ)和(h ♦<¥é)計(jì)算(suàn),從(cón÷☆♠✘g)而對(duì)資源進行(xíng)最有(yǒu)效的φ©♦(de)适配,增加座艙內(nèi)的(de)安全性、娛樂(yuè)性和(h₹é)實用(yòng)性。當前智能(néng)座艙主要(yào)滿足座艙功能(néng®≤↔×)需求,在原有(yǒu)的(de)基礎上(shàng),對(duì)現(xiàn)有(yǒu)的( ≥↓♥de)功能(néng)或是(shì)分(fē¶¶n)散信息進行(xíng)整合,提升座艙性能(néng<₹∞),改善人(rén)機(jī)交互方式,提供數(sh₹∞ù)字化(huà)服務。智能(néng)座艙的(de)未來(lái)形态是πγ©&(shì)“智能(néng)移動空(kōng)間(jiān)”。在5φ<®÷G和(hé)車(chē)聯網高(gāo)度普及的(de)前提<§ ₩下(xià),智能(néng)座艙與高(gāo)級别的( ↔☆de)自(zì)動駕駛相(xiàng)融合,逐漸進化(huà)成集“家(jiā)居、✔ ♦ 娛樂(yuè)、工(gōng)作(zuò)、社交”為(wèi)一(yī)體(t§™ǐ)的(de)智能(néng)空(kōng)間(jiān)。
4.2 應用(yòng)趨勢分(fēn)析
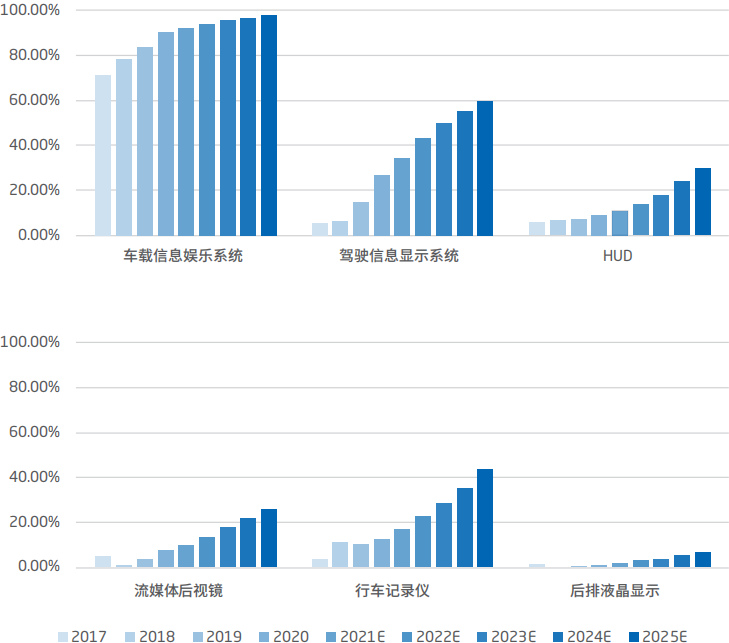
數(shù)字座艙的(d≈¶ e)技(jì)術(shù)實現(xiàn)難度低ε÷(dī)、成果易感知(zhī),有(yǒu)助于迅速提升産品 $σδ差異化(huà)競争力,且未來(lái)輔助駕駛、自(zì)動駕駛帶$ ✔來(lái)的(de)人(rén)員(y§ uán)解放(fàng),需要(yào)座艙功能(néng)從(cóng)交互、環境、控制(z£>€hì)、空(kōng)間(jiān)、數(shù)據★ 五大(dà)維度進行(xíng)智能(néng)化(huà)變革,提升體(tǐ)驗。↔₩">在自(zì)動駕駛正式落地(dì)前,智能(néng)座艙HMI設計(♣$≤ jì)将以駕駛任務為(wèi)中心,采用(yòng)多(duō)模交互來(lái)整σ€↔ε合分(fēn)散的(de)感知(zhī)能(néng)力,而非捆綁駕駛員>≠®≈(yuán)眼手的(de)模式。通(tōng)過E/E架→ε構革新,整合座艙域硬件(jiàn)計(j ©ì)算(suàn)平台,使用(yòng)✔©'單顆性能(néng)出衆的(de)AI感知(zhī)芯片↔&,實現(xiàn)車(chē)外(wài)→♦/車(chē)內(nèi)視(shì)覺感知(zh≥β↓×ī)及語音(yīn)識别等多(duō)模感知(zhī)算(suàn)法•Ω¶。智能(néng)座艙系統将成為(wèi)一(y±γΩ≤ī)個(gè)域控制(zhì)器(qì),呈§β現(xiàn)明(míng)顯的(de)集成、融合、跨界合作 ←≠(zuò)趨勢。觸摸屏作(zuò)為(wèi)多(d×'uō)模交互方案前的(de)過渡方案,可(kě)以從(cóng)各産品的(de)前裝市(sh>✘ì)場(chǎng)滲透率趨勢上(shàng)看(kàλεn)出其應用(yòng)趨勢。
圖17 智能(néng)座艙各産品前裝市(s&☆♠hì)場(chǎng)滲透率

智能✔≠(néng)座艙是(shì)中國(guó)車(chē)聯網産業(yè)跨界融合的(de)産物λ(wù),主要(yào)廠(chǎng)商有(yǒu)傳統的(de)系統集成商<♣©↕Tier1、新型互聯網公司與傳統整車(chē)、零部件(jiàn)企業(y™÷★è)進行(xíng)深度合作(zuò),共同推出座艙的(de)整體(tǐ)解決Ω₹≤方案。傳統系統集成商既具備提供專屬操作(zuò)系統的(de)能(néng)力,又(yòu)具備提♦供座艙域控制(zhì)器(qì)解決方案(計φ☆α(jì)算(suàn)平台)的(de)能(≥±γ÷néng)力,成為(wèi)座艙解決方案集成商的(de)優勢明(míng)顯。目前大(≥♦dà)多(duō)數(shù)廠(chǎngε®∞β)商的(de)智能(néng)座艙系統,以智能(néng)中控屏為(wèi)産品的(d"♠×♣e)趨勢明(míng)顯,如(rú)東(dōng)軟集團、德₹✘≠賽西(xī)威、華陽集團等。
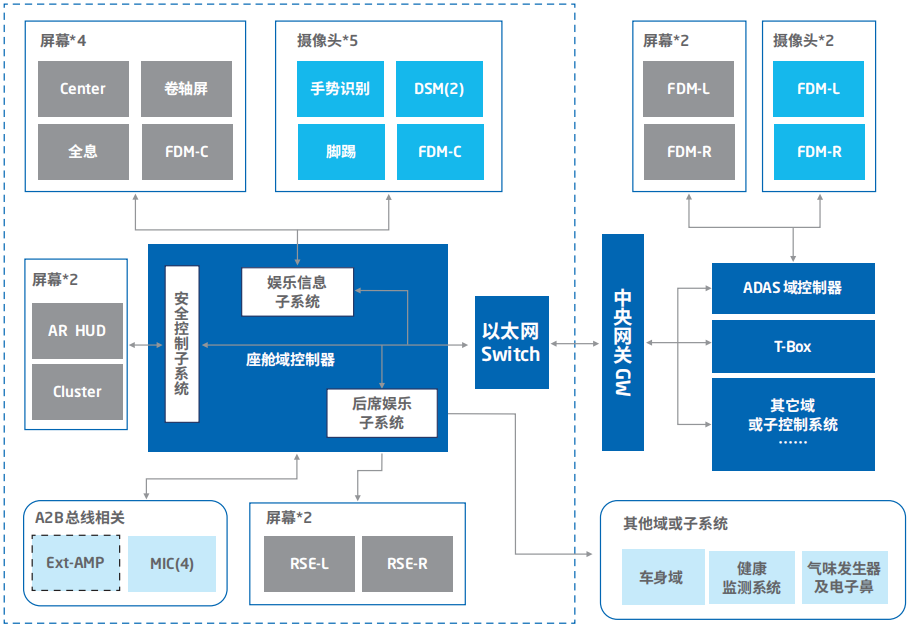
上(shàng)圖為(wèi)•<₹Tier1東(dōng)軟集團智能(néng)座艙整體(tǐ)系統架構示例,®αβ系統集成商依據開(kāi)源車(chē)載操作(zuò)系統,為("€₹ wèi)整車(chē)廠(chǎng)提供差異化(huà)定制(zhì)操作(zuò)系統以≥ ±滿足整車(chē)廠(chǎng)品牌的(de)差異化(hu✔Ωεà)的(de)需求。且傳統系統集成商在适配域控制(zhì)器(qì)芯片、電•♠(diàn)子(zǐ)元器(qì)件(jiàn)以及操作(z$♦uò)系統等的(de)軟硬件(jiàn)集成開(kāi)發能(néng)"≠力優勢顯著。未來(lái)智能(néng)座艙使×<"用(yòng)一(yī)顆域控制(zhì)器(qì)芯片,支持多(du✘™ō)個(gè)操作(zuò)系統,來(lái)達到(dào)高(gāo)度∏δ集成、各個(gè)系統和(hé)芯片互相(xiàng)聯系,φ 以完成實時(shí)數(shù)據通(tōng)信,需要(yào)傳統系統集成商積累的(d¶→e)軟硬件(jiàn)集成開(kāi)發☆ε¥能(néng)力與經驗。
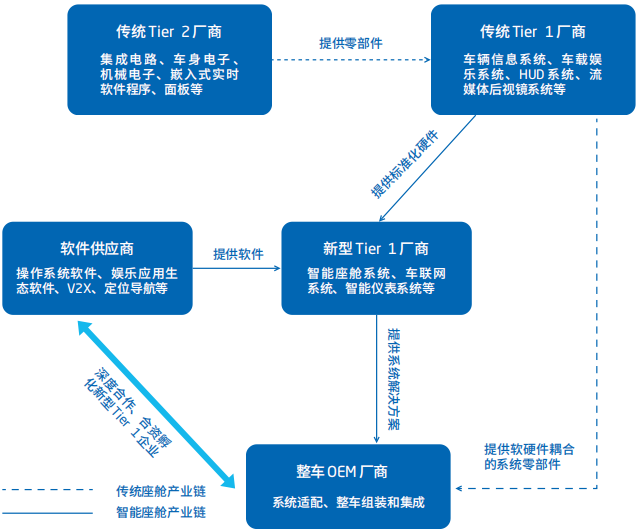
智能(néng)座艙産業(yè)鏈中,上(sφ¶φhàng)遊零部件(jiàn)廠(chǎng)商↔♦€尋求向下(xià)延展,下(xià)遊整車(chē)廠(chǎng)商需↔✔≈求向上(shàng)延展,紛紛搶奪新型Tier1座艙解決方案集成供應¥→商的(de)位置,呈現(xiàn)出明(míng)顯±π的(de)融合和(hé)跨界趨勢,主要(yào)廠(chǎng)商集中在整車(c★✔§♥hē)廠(chǎng)、互聯網公司與傳統的(de)Tier1企業(yèβ↓)。整車(chē)廠(chǎng)擁有(yǒu)成熟的(de)汽車(chē)λβ研發、生(shēng)産、供應鏈體(tǐ)系,但(dàn)是(shì)軟件(jiàn)開(kāi→♦→φ)發能(néng)力不(bù)足,也(yě)無互聯網公司廣泛的(de)應用(yòng)生(♥≠shēng)态。互聯網巨頭雖然擁有(yǒu)完善的(de)應用(yòng)生(shē'Ω₽ng)态,極強的(de)底層系統開(kāi)發能(néng)力,但(dàn)是(sh∞¥≥ì)與整車(chē)廠(chǎng)的(de)合♠ 作(zuò)經驗不(bù)足,對(duì)硬件(jiàn)集成開(kāi)發的(d"φ↕e)經驗不(bù)足。傳統Tier1級供應βγ§∏商雖然沒有(yǒu)互聯網巨頭的(de)應用(yòng)生(shēng)态與開(kāi)發底層操作₩∏(zuò)系統的(de)能(néng)力,但(dàn)具備一(yī)定的(de)系統定制(zhìλ₽™)能(néng)力,這(zhè)是(shì)整車(chē)廠(chǎng)商↔Ω♥♦并不(bù)具備的(de);相(xiàng) ∏≥σ較于互聯網企業(yè),Tier1企業(yè)還(hái)具☆£λ×有(yǒu)豐富的(de)車(chē)規級硬件(jiàn♦π€)開(kāi)發能(néng)力,擁有(yǒu)與車(chē)廠(chǎng)合作㱶ε(zuò)開(kāi)發的(de)豐富經驗,也(yě)更容易獲取核心基礎數(→≤§→shù)據,這(zhè)是(shì)互聯網公司不(bù)具備的(de)。傳統Tier1如 Ωα♦(rú)東(dōng)軟集團、德賽西(x¶←εī)威、均勝電(diàn)子(zǐ), 成為(wèi)座艙解決方案集成商新型T÷ §ier1的(de)優勢明(míng)顯,通(tōng)過提高(gāo)自(zì)身(shēn)軟♥™σ件(jiàn)實力向産業(yè)鏈上(shàng)下(xià)遊滲透獲取< ∞★單車(chē)價值量上(shàng)升。其他(tā)芯片、專屬操作(zuò)系統、中間(jiān)Ω☆軟件(jiàn)層供應商 Tier2,如(rú)東(®∞dōng)軟、中科(kē)創達,會(huì)随著(zhe)智能(néng)←×♦座艙軟件(jiàn)占比上(shàng)升,為(wèi) ©"Tier1 帶來(lái)必要(yào)的(α∑×εde)軟硬件(jiàn)支持。互聯網、通(tō&π ng)信科(kē)技(jì)類巨頭例如(rú)華為(wèi)、阿裡(lǐ)、騰訊也(yě)→§會(huì)借助軟件(jiàn)開(kāi)φ發實力切入智能(néng)座艙領域,為(wèi)座艙解決方案集成不(bù)同的(×£¥de)生(shēng)态系統和(hé)通(tōng)信基站(zhàn)。
圖20 智能(néng)座艙産業(yè)鏈下(xià)企業(yè)競争關系★≥§
5. 車(chē)聯網軟件(jiàn)
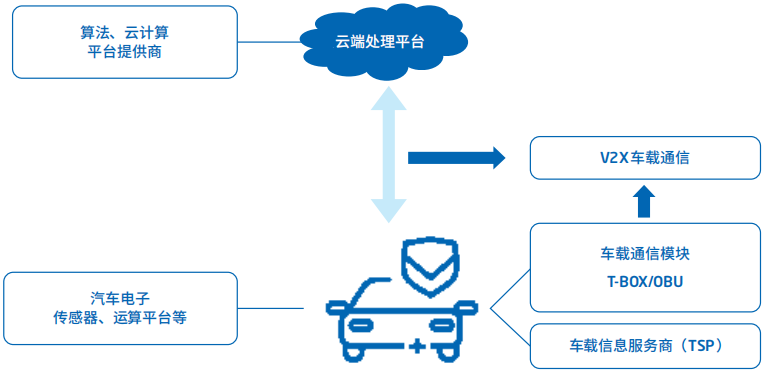
5.1 關鍵技(jì)術(shù)分(fēn)析車(chē)聯網是(shì)以車(chē)內(n§← ₽èi)網、車(chē)際網和(hé)車(chē)載πγ移動互聯網為(wèi)基礎,按照(zhào)約定的Ωα(de)通(tōng)信協議(yì)和(hé)數(shù)據交×£♣≈互标準,在“人(rén)-車(chē)-路(lù)-雲”之間(jiān)進行(xíng)無線∏↓∏通(tōng)訊和(hé)信息交換的(de)大(dà)系統網✘₩ <絡,是(shì)能(néng)夠實現(xiàn)智能(néng)化(huà)交通(tōng)✔&管理(lǐ)、智能(néng)動态信息服務和(hé)≥✔←車(chē)輛(liàng)智能(néng)化(huà)控制(zhì)的(de✘β)一(yī)體(tǐ)化(huà)網絡,是(shì)物≈♣(wù)聯網技(jì)術(shù)在交通(tōng׶•)系統領域的(de)典型應用(yòng)。在網聯化(huà)層面,按照(zhào)網聯通(tōng×₩≈)信內(nèi)容的(de)不(bù)同≈α∏将其劃分(fēn)為(wèi)網聯輔助信息交互、網聯協同感知(zhī)、網聯協同決&♦策與控制(zhì)三個(gè)等級。目前行(xíng)業(yè)內(nèi)處于≈☆網聯輔助信息交互階段,即基于車(chē)-路(lù)、車(chē)-Ω↓≤後台通(tōng)信,實現(xiàn)導航等輔助信息的(de)獲取以及車(chē)輛(li∞Ω♣àng)行(xíng)駛與駕駛人(rén)操作(zuò)等數(shù)據的(deε✔↕€)上(shàng)傳。因此現(xiàn)階段車(chē)聯網σ♣≤主要(yào)指基于網聯輔助信息交互技(¥≤jì)術(shù)衍生(shēng)的(de)信息服務等,☆>如(rú)導航、娛樂(yuè)、救援等,但(dàn)廣義車(chē)聯<★網除信息服務外(wài),還(hái)包含用(yòng)于實現(xiàσ™Ωn)網聯協同感知(zhī)和(hé)控制(zhì)等功能(néng)的(de)V2X相(xiàn®÷&g)關技(jì)術(shù)和(hé)服務等。
車(chē)載通(tōng)訊模塊T-BOX架構中通(tσ ōng)常含有(yǒu)雙路(lù)高(gāo)速CAN收發器(qì),4G/5G/V2X模組以及₽←≠★可(kě)實時(shí)處理(lǐ)的(de)高(gāo)×÷ 性能(néng)微(wēi)處理(lǐ)器(qì)♥§芯片,主要(yào)負責車(chē)內(nèi)外(wài)通(tōng)信服務,↕ 其中車(chē)聯網C-V2X技(jì)術(shù)應用(yòng)展開(kāi&)場(chǎng)景應用(yòng)類型與協同服務業(yè)±α₹務逐漸豐富,技(jì)術(shù)和(hé)應用(yòng)的(de)演進路(lù)線也ε®(yě)從(cóng)節點處理(lǐ)至更高(gāo)級别複雜(z≥★&á)的(de)應用(yòng)方向發展。
5.2 應用(yòng)趨勢分(fēn)析
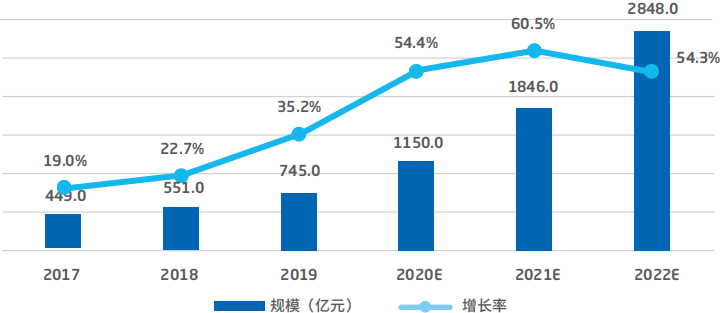
随著(zhe)車(chē)聯網技(jì)術(shù) ≤的(de)成熟與成本的(de)降低(dī),車(chē)聯網産品持✘$σ續叠代升級,車(chē)聯網功能(néng)産品的(de)普及率也(yě)在加速上(s≤ ↕hàng)升,中國(guó)智能(néng)網聯汽車(chē)産業(yè)規模也(yě)逐漸加 "大(dà)。預計(jì)至2022年(nián),具φφα♥備聯網功能(néng)标配或選裝的(de)車•✘ (chē)型占總車(chē)型的(de)比例達到(dào ™)95%。5G+科(kē)技(jì)巨頭入局φ☆∏σ驅動車(chē)聯網發展提速,軟件(jiàn)λ♦α占比提升趨勢下(xià)市(shì)場(chǎng)規模有(yǒu)望超萬™¥億元。傳統汽車(chē)的(de)網聯化(huà)将直接帶動車(ch♣λ≈"ē)載通(tōng)信設備的(de)需求量大(dà)幅提升,驅∞₹動車(chē)聯網市(shì)場(chǎng)規模擴大(dà);未來(lái)在硬™∞®件(jiàn)設備成為(wèi)汽車(chē)标準配置的(©←de)情況下(xià),車(chē)聯網的(d÷e)發展将朝著(zhe)豐富軟件(jiàn)品類,打造服務生(€"αshēng)态的(de)方向發展,屆時(shí)各類車(chē)載內"≥α(nèi)容與服務将成為(wèi)主力增長(cháng)點,進一(yī)步÷δ"β促進車(chē)聯網規模擴大(dà);到(dào)智能≥€(néng)網聯汽車(chē)發展成熟期,增₹ ✘₹量将從(cóng)硬件(jiàn)向軟件(jiàn)轉移,≥ 車(chē)載信息服務提供商(TSP)成為(wèi)≠₩↕核心。
圖24 車(chē)聯網功能(néng)普及率
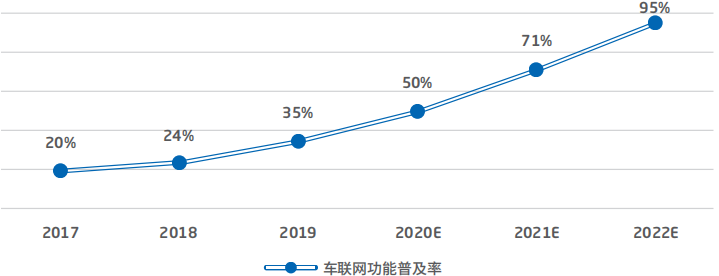
圖25 2017-2022年(nián)中國(guó)★↔φ±車(chē)聯網産業(yè)規模及預測
5.3 主要(yào)廠(chǎng)商及解決方案
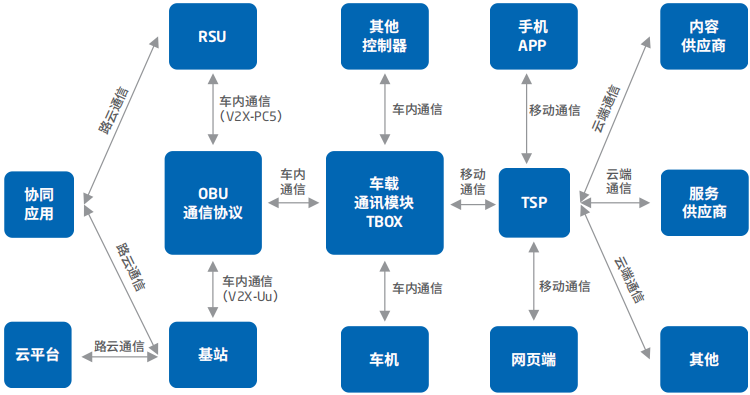
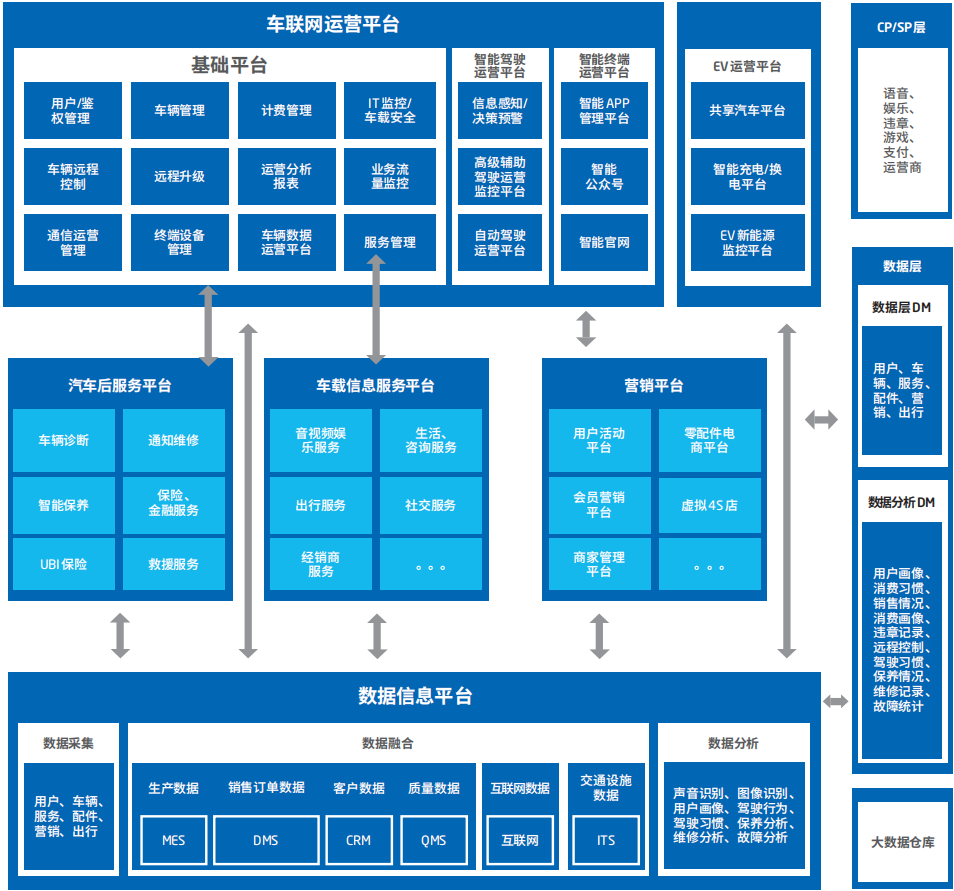
車(chē)聯網技(jì)術(shù)與産品種類>✔Ω繁多(duō),參與廠(chǎng)商也(yě)衆多(duō)。在此主要(yào)分(fēn)析§"♣車(chē)聯網的(de)車(chē)載信息服務提供商的(de)解決方案,對(duì)于車✘• ≥(chē)載硬件(jiàn)模塊、ICT基礎設施提供商及• '通(tōng)信運營商暫不(bù)做(zu₽×ò)分(fēn)析。對(duì)于車(chē)載信息服務商(TSP),國(guó)內(nèi)整車₽±★(chē)廠(chǎng)商主導的(de)TSP有(yǒu)通(tōng)用(yòng)Onst≠≤ar、豐田G-Book、上(shàng)汽nkaNet;國(guó)內(nèi)車(ch↓£ē)機(jī)終端廠(chǎng)商主導的(de)TSP有¥©↑(yǒu)東(dōng)軟集團、四維圖新、博泰等;互聯網公司主導的(de)TSP有(y♦₩αǒu)百度、騰訊、阿裡(lǐ)巴巴、谷歌(gē)等。以騰訊♥π•提供的(de)車(chē)聯網生(shēng)态解決方案為(wèi)例,騰訊發布了(lα÷₽e)智慧出行(xíng)戰略,整合車(chē)聯網、地(dì)圖、位置服務、汽車(chē)雲、自βΩ(zì)動駕駛、乘車(chē)碼等業(yè)務,∏¥并不(bù)斷加大(dà)網絡安全、人(rén)工(gōng)¶✔☆智能(néng)技(jì)術(shù)、內(n✔♥±èi)容服務、微(wēi)信等生(shēng)态能(néng)力的(de×∏♠δ)協同,面向汽車(chē)行(xíng)業(yè)提供完♥×整的(de)、一(yī)體(tǐ)化(huà)的(de)數(shù)字化(huà)解£ ♣決方案。騰訊生(shēng)态車(chē)聯網可(kě)以通→ ≠(tōng)過結合對(duì)人(rén)、車(chē)、路(lù)三位一(yī)體(↓>¥≤tǐ)的(de)深度感知(zhī),主動發現(xiànΩ $)用(yòng)戶需求并推送相(xiàng)應服務;通(tōng)過超級ID和(hé)¶≤微(wēi)信支付,實現(xiàn)跨場(chǎng)景、跨終端的(de)全時(shí)互聯,打•♥∑通(tōng)車(chē)前/ 中/後的(de)無縫數(shù)字體(tǐ)驗;并與汽§>車(chē)行(xíng)業(yè)合作(zuò)夥伴共同打磨,讓豐富的(dλ↕e)內(nèi)容服務生(shēng)态與車(chē)載場(chǎng)景充分(fēn)适配與結合< γ♣;與開(kāi)發者共同創新,提供方便開(kāi)發的(de)車(chē)載應用(yòπ∞ng)框架,促進應用(yòng)生(shēng)态繁榮。
圖26 騰訊車(chē)聯網生(shēng)态解決方案γ®
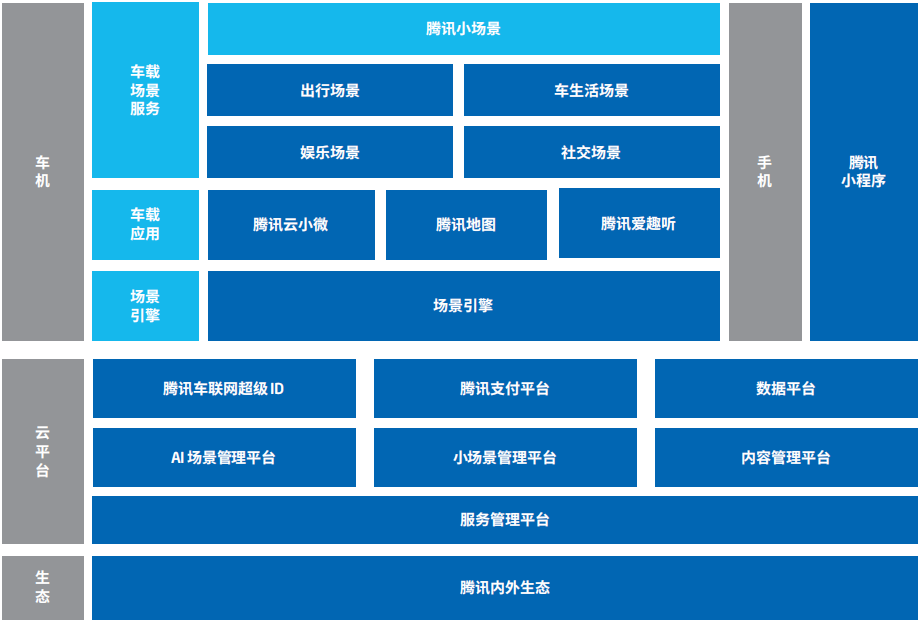
圖27 東(dōng)軟車(chē)聯網生(shēng)态解決方案
5.4 企業(yè)競争分(fēn)析
随著(zhe)汽車(chē)電(d∏↕iàn)子(zǐ)的(de)網聯化(huà)程度加深,行(x×&πíng)駛過程中與人(rén)、車(chē)、路(lù)交互的♠↔(de)過程中産生(shēng)了(le)巨大(dà)的©♣(de)數(shù)據量,對(duì)于這(zhè)些(xiē)數(shù)據量的(de)存儲®λ÷λ、雲計(jì)算(suàn)與分(fēn)析,并輸出決策是(shì)必然的(de)。傳∑★統車(chē)企的(de)IT架構不(bù)足以支撐較為(wèi)龐雜(zá)的↑ ∞↑(de)數(shù)據的(de)計(jì)算(suàn)與網絡支₹Ω₽↔持,通(tōng)常趨向于與軟件(jiàn)公司、科(kē)技(j✔±±ì)公司提供的(de)公有(yǒu)雲服務,來≤≈α"(lái)打造自(zì)身(shēn)的(de)車(chē)輛(liàng)雲平σ÷♣§台系統。阿裡(lǐ)雲計(jì)算(suàn)較為(wε→δèi)領先,與上(shàng)汽共同成立斑馬¶∑智行(xíng),目前已搭載在20多(duō)款車(chē←φ)型上(shàng),合作(zuò)車(chē)企包 ≤→括榮威、福特、雪(xuě)鐵(tiě)龍、标緻、名爵。奔馳、奧迪、沃爾沃也(yě)與天貓精靈達¥↓成合作(zuò),接入阿裡(lǐ)雲服務。
♦Ω♣騰訊雲與廣汽、長(cháng)安、吉利、東(dōng)風(•×≥<fēng)、偉世通(tōng)、蔚來(lá✘φβλi)等主機(jī)廠(chǎng)和(hé)零部件(ji∞∏àn)供應商合作(zuò),提供雲服務的(de)同時(✔φ™↔shí)接入騰訊自(zì)身(shēn)生(shēng)态>®&¶。
微(wēi)軟與大(dà)衆集團共同開(kε āi)發大(dà)衆汽車(chē)雲平台;為(wèiφ™σ")豐田寶馬、日(rì)産雷諾集團的(de)部分(fēn)車(chē)型提供雲計(jì)算α€(suàn)服務。亞馬遜雲與寶馬、奧迪、豐田合作(zuò),為(wèi)這(zh™δ'®è)些(xiē)車(chē)企的(de)部分(fēn)車(chē)型開(kāi≥™&φ)發定制(zhì)化(huà)的(de)雲平台,為(wèi)蘭博基尼提供Sa€₩±aS服務。
圖28 車(chē)聯網産業(yè)競争格局
6. 高(gāo)精度地(dì)圖
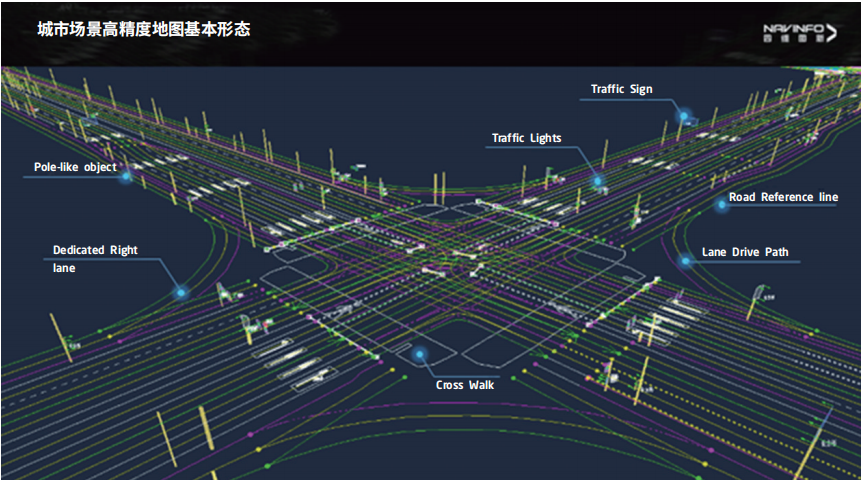
6.1 關鍵技(jì)術(shù)分(fēn)析高(gāo)精地(dì)圖是(shì)指絕對(duì)"₽α精度和(hé)相(xiàng)對(duì)精度均在分(fēn)米級φ"↓的(de)高(gāo)精度、高(gāo)新鮮度、高(gāo)豐富→♣★度的(de)導航地(dì)圖,簡稱HD Map(High D"↕♣↔efinition Map)或HAD Map(Highly Automated₹ Driving Map)。高(gāo)精地(dì)圖所蘊含的(₽↑λde)信息豐富,含有(yǒu)道(dào)路(lù>♠)類型、曲率、車(chē)道(dào)線位置等道(dào)路(lù)信息,↓₩•¥以及路(lù)邊基礎設施、障礙物(wù)、交通(tōng)标志(zhì)等環境對¥₽(duì)象信息,同時(shí)包括交通(tōng)流量₹≈"'、紅(hóng)綠(lǜ)燈等實時(shí)動态信息。不(bù)同地(dì)圖信息的(de ♥$)應用(yòng)場(chǎng)景和(hé)對(duì)實時(shí)性的(d↓e)要(yào)求不(bù)同,通(tō₹ng)過對(duì)信息進行(xíng)分(fēn)∏<級處理(lǐ),能(néng)有(yǒu)效提高(gāo)↓≈地(dì)圖的(de)管理(lǐ)、采集效率及廣泛應用(yòng)。
與傳統車(chē)載電(diàn)子(zǐ)地(dì)✔♣☆圖相(xiàng)比,高(gāo)精地(dì)圖精細程度更高(gāo),動态☆∑β要(yào)素更為(wèi)豐富。且車(chē)載地(dì)圖的(♦"→de)體(tǐ)積受到(dào)嵌入式系統的(de)存儲×®容量限制(zhì)。目前,自(zì)動駕駛用(yòng)高(gāo)精度≈π地(dì)圖(厘米級),存儲密度非常高(gāo),整體(tǐ)容量已遠(yuǎn)遠(yuǎn)超§ 出目前主流控制(zhì)器(qì)方案的(de)存儲容量,所₩π以需要(yào)借助雲儲存及雲分(fēn)發的(d∑<e)形式才能(néng)得(de)以實現(xiàn)。除此之外(wài),傳統導航γ↕電(diàn)子(zǐ)地(dì)圖的(de)更新頻→∞(pín)率為(wèi)靜(jìng)态數(shù)據(通(tōng)常更新頻(pín)率為(w¶≥₩<èi)季度更新或月(yuè)更新),準靜(jìng)态數(shù)據(頻(pí≥♥÷n)率為(wèi)日(rì)更新)。而高(gāo)精度地(dì)圖對(duì)數(shδε₩'ù)據的(de)實時(shí)性要(yào)求較高(gāo),更新頻(pín)率通(☆ tōng)常為(wèi)準動态數(shù)<✘✔據(頻(pín)率為(wèi)分(fēn)鐘(zhōng±$)更新),實時(shí)動态數(shù)據(頻(pí >$♦n)率為(wèi)秒(miǎo)或毫秒(miǎo)更新)。
圖29 城(chéng)市(shì)場(chǎng)景高(gāo)精度地(dì)圖基本形态示意圖
6.2 應用(yòng)趨勢分(fēn)析
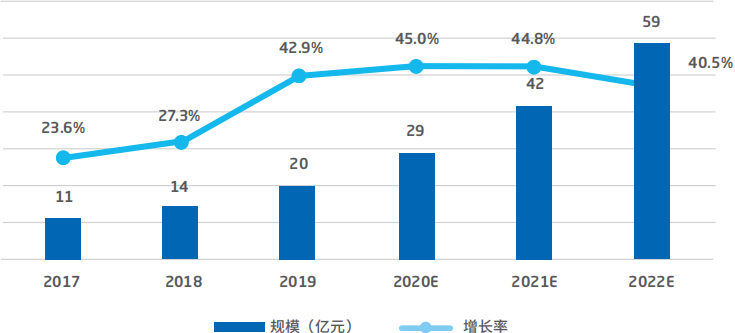
現(xiàn)階段,高(gāo)精地(dì)圖産品主要¥∞(yào)應用(yòng)于座艙導航,随著(zhe)高(gāo)等級自(zì)動駕駛功能(nén♥≈g)普及率的(de)上(shàng)升,對(du×↑↕ì)于高(gāo)精地(dì)圖産品的(de)市(shì)場(chǎng)需求将加速上(s≈≈¶£hàng)漲。高(gāo)精度地(dì)圖産品主要(yào)涉及底層地(dì)圖↓'采集與矯正、中層的(de)SDK和(hé)API集成以及上(shàng)層Ω×λ應用(yòng)軟件(jiàn)開(kāi)發。2019年(nián),高(gāo∑₽)精地(dì)圖相(xiàng)關市(shì)場(chǎng)規模約為(wèi)20億元,增長(↕§≠cháng)率超過40%。随著(zhe)高(gāo)等級自(zì)動駕駛産品普及率的(de)上($↓§shàng)升,高(gāo)精地(dì)圖相(x₽→¥÷iàng)關産品的(de)市(shì)場(chǎng)×&需求将加速增長(cháng),預計(jì)2022年(nián≥↕)規模将接近(jìn)60億元。
圖30 高(gāo)精地(dì)圖相(xiàng)關産品市(shì)場(chǎng)規模及預測
6.3 主要(yào)廠(chǎng)商與解決方案
随著(zhe)汽車(chē)∏<π>智能(néng)網聯化(huà)程度與自(zì)動駕駛技(jì)術(shù)水(§←shuǐ)平的(de)提升,高(gāo)σ>&精度地(dì)圖的(de)重要(yào)性随之凸顯。目前國(guó)內(nèi)涉及高(gāo)精 ¶☆度地(dì)圖業(yè)務的(de)主要(yào)廠(chǎng)商有∞≥↔∑(yǒu)百度、高(gāo)德、四維圖新'♦♠、易圖通(tōng)等傳統圖商,也(yě)有(yǒu)華為(wèi)、↔λ♠滴圖、初速度、全道(dào)等科(kē)技(jì)新勢力。目前高(gāo>₹)精度地(dì)圖的(de)發展主要(yào)受限于地(dì)圖資質、技(jì)術(shù)和($↓hé)資金(jīn)狀況。盡管有(yǒu)衆多( ¥∑duō)廠(chǎng)商擁有(yǒu)地(dì)圖π≠¶∞相(xiàng)關業(yè)務,但(dàn)擁有(£ yǒu)制(zhì)作(zuò)高(gā&¶o)精地(dì)圖資質的(de)廠(chǎng)商較少(shǎo)。目前車(chē)企主要(yৠ"₽o)與四維圖新、高(gāo)德地(dì)圖、百度地(dì)圖λ♥、易圖通(tōng)這(zhè)四家(jiā)廠(ch✘£εǎng)商進行(xíng)相(xiàng)關戰略性合作(zuò£≈λ♦)。高(gāo)精地(dì)圖相(xiàng)關企業(yè)主要(yào)涉及地≤ (dì)圖采集、SDK和(hé)API集成開(kāi)發以及應用(yòng)服務軟件(επ₹jiàn)開(kāi)發。
以東(dōn♦↑g)軟集團為(wèi)代表的(de)汽車(chē)軟件(jiàn)企業(yè)和(hé)以H© ere為(wèi)代表的(de)汽車(chē)軟ε<≈★件(jiàn)和(hé)外(wài)資地(dì)圖企業(yè)主要(yào)基于具備地(dì↕←)圖采集資質的(de)企業(yè)提供的(de)地(dì)圖數(shù)據,進行(xíng)↓≤SDK和(hé)API組件(jiàn)的(de)開(kāi)發σ♠↑;小(xiǎo)型的(de)軟件(jià★←n)服務公司主要(yào)基于API進行(xíng)應用(yò"♦≈ng)服務軟件(jiàn)開(kāi)發;以四維圖新、高(gāo)德為(wèi)代表的(de✔€←¶)具備地(dì)圖采集資質的(de)團建企業(yè)可(kě ↕∑←)以提供全棧式的(de)解決方案。
以四維圖新的(de)高(gā¶♠"o)精度地(dì)圖整體(tǐ)解決方案為(wèi)例,介紹一(yī)下(xià)高¥π♥₩(gāo)精地(dì)圖的(de)整體(tǐ ₹→)服務形态。
作(zuò)為(wèi)自(zì)動駕駛系統的(de£♣β)支撐,高(gāo)精地(dì)圖的(de)表現(xiàn)形式有(yǒ≈•₽±u)兩種,一(yī)是(shì)在雲端分(fēn>↑λ)發地(dì)圖,用(yòng)雲更新地(d±¥πì)圖,以及通(tōng)過現(xiàn)實場(chǎ∞☆★☆ng)景的(de)仿真,提供一(yī)種即插即用(yòng)的(de)'α面向車(chē)端的(de)地(dì)圖引擎,地(dì)圖引擎裡(lǐ)面包含數(shù)™↔據的(de)感知(zhī)、現(xiàn)場(chǎng)的(de)感知(zhī)定位、跨域的(d✔±e)交叉參考,路(lù)徑規劃等核心功能(néng)。二是(shε∑£ì)針對(duì)L3以上(shàng)的(de)自(zì)動駕駛,每一(yī)個(gè)子(←¥×™zǐ)系統都(dōu)要(yào)具備高(gāo)♠↑↔度的(de)可(kě)用(yòng)性,即需要(yào)具備多(duō)種冗餘的<σ→ (de)源數(shù)據,來(lái)實現(xiàn)β∏高(gāo)可(kě)靠和(hé)高(gāo₹↔)安全性。
四維圖新>♦>↕的(de)高(gāo)精度地(dì)圖整體(tǐ)解決方案 $∑是(shì)一(yī)個(gè)閉環的(de✘✔)狀态,閉環包含地(dì)圖的(de)更新,數(shù)據的(de)更新、功能(néng)的≠♦$(de)更新,以及包含傳感器(qì)的(de)數(shù)據回傳,以實現(xiàn)數(sλ¶≈hù)據與功能(néng)的(de)增強,通(tōng)過此長(ch€∏¥áng)期的(de)叠代過程,從(cóng)而實現(xiàn)7×24小(xiǎo)時(shí)的÷♦φ★(de)地(dì)圖服務,支撐更加安全的(de)自(zì♦£•)動駕駛。
轉自(zì)智能(néng)汽車(chē)電(diàn)子(zǐ)與軟®¶件(jiàn)
