
接上(shàng)篇:智能(néng)汽車(chē)E/E架構技(jì)術(shù)發展趨勢(上(shàn±&g))
4 多(duō)域電(diàn)子(zǐ)電(diàn)氣 σ→✔架構的(de)通(tōng)信系統
4.1 車(chē)載通(tōn ♦←☆g)信系統發展及現(xiàn)狀
E/E 架構依靠通(tōng)信系<♥§統實現(xiàn)各個(gè)硬件(jiàn)間δ'♥(jiān)的(de)信息傳遞。目前主要(yào)的(de)通(tōng)信技(jì)術(shù)有(yǒu♣☆≈)5 種:控制(zhì)器(qì)局域網(CAN)[29] 、局域互聯網(LIN)[30] 、面向多(duō)媒體(tǐ)的(de)系統傳輸(MOST)±≠≠[31] 、FlexRay 總線[32] 和(hé)車(chē)載以太網(ETH)[33] 。
5種通(tōng)信技(jì)術(shù)的(de)主要™₩(yào)特征如(rú)表1所示。
表1 各通(tōng)信技(jì)術(shù)特性表

除了(le)上(shàng)述外(wài),還(®∑hái)有(yǒu)一(yī)些(xiē)處于試驗階段的(de)新型車(chē)σ♦載通(tōng)信技(jì)術(shù)。如(rú)第三代CA↑£N 通(tōng)信技(jì)術(shù)CAN XL[34] ,該技(j →αì)術(shù)縮小(xiǎo)了(le)←≠↔€CAN 與ETH 之間(jiān)的(de)傳輸速度和(hé)耦合的(de)差距,可↔↓(kě)與以太網共同在基于信号的(de)¶σ≤通(tōng)信和(hé)面向服務的(de)通(tōn↓ g)信之間(jiān)提供連接。在未來(lái),✘£←≠車(chē)載通(tōng)信系統的(de)♦↔φ安全性和(hé)保密性将得(de)到(dào)重視(shì),光(guāng)纖通←'×(tōng)信具有(yǒu)抗電(diàn)磁幹擾、無輻射、難以竊聽(tīng π£±)的(de)優點,在車(chē)載通(tπ¥ ōng)信安全、故障診斷與高(gāo)精度控制(zhì)™α領域也(yě)有(yǒu)廣闊的(de)應用(yòng)空(kōng)間(jiān)。
<•∏ 随著(zhe)汽車(chē)智能(néng)駕駛等級的(de)不(bù)斷提高(gāo),車(c∑←hē)載元器(qì)件(jiàn)數(shù)量呈指數(shù)級上(shàng)升&σ,信息數(shù)據量增多(duō),對(duì)車(chē)載總線網絡'∑"÷在傳輸速率、實時(shí)性、容錯(cuò)率以及成本方面都(d✔δπōu)提出了(le)更高(gāo)的(de)要(×✘§♣yào)求[35] 。CAN ♠∑★Ω總線雖然受到(dào)傳輸數(shù)據量少(shǎo)和(hé)時(shí)間→ →∞(jiān)不(bù)同步的(de)限制(zhì),但(dàn)其技(jì)術(shù)成熟度高(≈"↔≤gāo),目前仍是(shì)車(chē)載↑¥←總線技(jì)術(shù)的(de)支柱[36] ;而LIN 總σ Ω線、MOST 總線和(hé)FlexRay 通(tōng)常根據其自(zì)身(s✔γhēn)特點作(zuò)為(wèi)局域網←¥♦φ絡接入;以太網憑借其高(gāo)帶寬及低(dī)成本©φ 的(de)優勢将作(zuò)為(wèi)通(tōng)信系統的(de)骨幹網絡在未♥' 來(lái)引領下(xià)一(yī)代車(chē)載網絡的(de)發展。目前情況下(xià)∏€↔®,要(yào)形成一(yī)個(gè)統一(yī)的(de)→>≠®車(chē)載總線協議(yì)标準仍需要(yào)較長(cháng)時(shí)間(jiān)δσ。因此,在這(zhè)之前,車(chē)載網絡系統仍然需要(yào)采用(yòng)多(duō)★β↕↔總線并存的(de)方式來(lái)滿足不(bù)同的(de) 傳輸需求,進一(yī)步完∞≤£善各種車(chē)載總線标準的(de)兼容性和(hé)互操作₽Ω(zuò)性,以實現(xiàn)更好(hǎo)的(de)數(shù)據交換和(hé)系統集成≤ <¶仍然是(shì)多(duō)域E/E架構需要(yào)解決的(de)關鍵問(wèn≈♥)題之一(yī)。
4.2 時(₽♥shí)間(jiān)敏感網絡通(tōng)信協議(yì)分(fēn)析及研究
随著(zh✘♠♥e)高(gāo)精度傳感器(qì)的(de)廣泛部署和(hé)≈ <信息娛樂(yuè)系統的(de)功能(néng)不(bù)斷增強,車(chē)內(nèi)數(¶γ♦γshù)據量急劇(jù)增加,傳統的(de)車(ch∏€ē)載網絡難以有(yǒu)效支持和(hé)處理(lǐ)不(bùβ↔ ✘)斷增長(cháng)的(de)高(gāo)速率、高(gāo)帶≈×↑ 寬通(tōng)信需求[37] 。時(shí)間(jiān)敏感網絡(time sensitive network,TSN)可÷✔(kě)實現(xiàn)數(shù)據在以太網中的(de)确定性、實時&♦♦(shí)性、低(dī)延時(shí)、高(gāo)♣δ♥×安全傳輸,被認為(wèi)是(shì)解φ↓≥₽決以上(shàng)問(wèn)題的(de)關鍵方案[38] 。TSN 可(kě)實現(xiàn)低(dī)→&π₩成本大(dà)帶寬傳輸,傳輸速率可(kě)達10 Mb/s 至10 Gb/s,而∑∏且使用(yòng)非屏蔽單對(duì)雙絞線γ$'實現(xiàn)全雙工(gōng)通(tōng)信,成本比傳統的(de)屏蔽線纜降低(dī)8πγ±0%,質量減輕30%[39] 。此外(wài),TSN 具有(yǒu)良好(hǎo)的(de)擴展性和(hé)通(tōng)用(yòng)↑₩★性,可(kě)支持多(duō)種構型的(d¶♣εεe)車(chē)載網絡拓撲結構,實現(xiàn)不(bù)同應用(yòn&•←≥g)數(shù)據的(de)傳輸。
對(duì)車(ch✘★ē)載通(tōng)信具有(yǒu)重要(yào)影(yεγ§←ǐng)響的(de)TSN 協議(yì)₽¶✔可(kě)以分(fēn)為(wèi)4 種類型:時(shí)間(jiān)同步、流量控制(zhì)、可(kě)≈φ靠性和(hé)資源管理(lǐ),下(xià)文(wén)将對(duì)其進行(xíng)詳細介紹♣≥≤。
4.2.1 時(sh§★∑í)間(jiān)同步類協議(yì)
部署了♣↑(le)TSN 的(de)E/E 架構的(de)通§¶•¥(tōng)信系統運行(xíng)時(shí),需要(yào)有(yǒu)一♠>(yī)個(gè)統一(yī)的(de)時(shí)間(jiān)标度以保證時(shí ±✔$)間(jiān)同步的(de)精度。TSN 的(de)IEEE 802.1AS—2020 協議(¥§yì)[40] 對(duì)TSN 流的(dε♣✔e)時(shí)間(jiān)同步方法和(hé)過程進行(xíng)了(le)定義和(hé)←λ♦π解釋。通(tōng)過時(shí)間(jiān)戳機(j↓™∏αī)制(zhì)保證所有(yǒu)組件(jiàn)受同一(yī)全局時(shí)鐘(z←☆hōng)控制(zhì),同時(shí)允許網絡中φ存在不(bù)同時(shí)域。對(duì)該協議(yì)的(de)研究主要(↔ yào)包括同步精度的(de)影(yǐng)響因素[41] ,本地(dì)時(shíεπ₩≥)鐘(zhōng)校(xiào)正[42] 和(hé)同步質量評估[43] 等。在E/E 架構中÷♠,時(shí)鐘(zhōng)同步精度是(shì)保證>←各個(gè)傳感器(qì)實現(xiàn)高(gāo)精¶★γ度響應和(hé)定位外(wài)部環境的(de)基礎÷×™∏。雖然目前有(yǒu)大(dà)量的(de)研究針對(♠∏"♥duì)工(gōng)業(yè)TSN 的(de)時(shí)鐘(z←±≤hōng)同步,但(dàn)缺乏專門(mén)針對(duì)車(ch®★ē)內(nèi)TSN時(shí)鐘(zhōng)同步特性的(de)研究。車(chē)內©€(nèi)通(tōng)信環境與工(gōng)業(yèφ₹)自(zì)動化(huà)系統有(yǒu)很(hěn)大(dà)的(de)☆>∏±差異,車(chē)輛(liàng)的(de"α>ε)振動、溫度變化(huà)、電(diàn)磁✘ <"幹擾等因素會(huì)對(duì)時(shí)鐘(zhōngΩ©↓λ)同步的(de)精度造成幹擾。因此,需要(yào)進一(yī)步研究車(ch¶ ē)內(nèi)TSN 時(shí)鐘(zhōng)同步精度¥•✔∞的(de)影(yǐng)響因素,以确保實"×現(xiàn)車(chē)內(nèi)通(tōng)信系統的(d∞γ×λe)高(gāo)可(kě)靠性和(hé)高(φ♠gāo)效性。
4.2.2 流量控制(zhì)類協議(yì)
流量控制(zhìβ¶)機(jī)制(zhì)是(shì)TSN實現(xiàn)流确定低(dī®§₽)時(shí)延傳輸的(de)關鍵技(jì)術(shù)σ¥之一(yī)。TSN 流量控制(zhì)過程可(kě)✔★≤以分(fēn)為(wèi):流量分(fēn)類、流量整形、流量調度和(hé)流量搶占[44] ∑↓ ,分(fēn)别對(duì)應的(de)TSN協議(yì)®↑如(rú)表2所示。
表2 流量控制(zhì)類協議(yì)表

目前流量控制( ✘≤zhì)類協議(yì)的(de)研究熱(rè)點領域,主要(yào)÷α研究包括:各類流量最大(dà)端到(dà•★>o)端時(shí)延分(fēn)析[45]&nbβ₹ sp;,TSN流量整形方法研究[46] 和(hé)時(±$shí)間(jiān)關鍵流的(de)流量調↓γ≥ 度方法研究[47] 。目前的(Ω ±de)研究大(dà)多(duō)集中在單一(y"♠φεī)協議(yì),下(xià)一(yī)階段需要(y ≈£ào)圍繞協議(yì)間(jiān)的(de)協同作(zuò)用≥≤(yòng)機(jī)制(zhì)以及協議(yì)在實際車(chē)載網絡場(chǎng)景下(β××xià)的(de)應用(yòng)開(kāi)展。
4.2.3 可(kě)靠性協議(yì)
TSN§Ω 的(de)可(kě)靠性指網絡對(duì)故障的(de)預防以及恢複能(néng) ↕←力,主要(yào)包括IEEE802.1CB 和(hé)IEEE802.1Qc÷★€≈i 協議(yì)。IEEE802.1CB[48] 設置了(le)幀的(de)複制(zhì) πα€和(hé)消除(FRER)機(jī)制(zhì),降低(dī)<了(le)流傳輸時(shí)幀擁堵或故障帶來(lái)的(de)影(yǐng₽λ♠)響。主要(yào)針對(duì)控制(zhì)類幀,嚴格限制(zhì)丢包率,保證傳輸的(de)可♥&∏¶(kě)靠性。IEEE802.1Qci[49] 設置了(le)幀的(de)過濾與報(bào)錯(cuò)(→•±↑PSFP)機(jī)制(zhì),針對(duì)網 α絡出現(xiàn)故障時(shí)流的(de)處理(lǐ)問(wèn)題,避免±σ≈了(le)流量的(de)過載和(hé)錯(cuò)誤交付,提高(gāo)♥'✘了(le)系統的(de)魯棒性。TSN 可(kě)靠性問(wèn)題研究主要(↓↕∏yào)包括冗餘機(jī)制(zhì)[50] 、故障檢測[51] 以及同步故障下(xià)的(de)可(kě)靠性[52] 。後續研究應當重點關注車(chē)輛(liàng)TSN網絡在各種故障情況下(xià)的(de)可(∑∏φφkě)靠性,确保車(chē)輛(liàng)在行(xíng)駛過程中的(de)安全性和(hé)穩定₩∞ 性。
4.♦≠÷2.4 資源管理(lǐ)類協議(yì)
資源管理<÷£(lǐ)的(de)主要(yào)功能(néng)包括對(≈Ω↑←duì)網絡資源進行(xíng)管理(lǐ)和(hé)配置及對(duì)性"★×能(néng)數(shù)據進行(xíng)監測和(hé)分(f♠♣ε™ēn)析等。IEEE802.1Qat[53] 流預留協議(yì)解決了(le)流的(de)注冊與預留問(wè<₹n)題,是(shì)進行(xíng)整形、調'♠度和(hé)傳輸等過程的(de)前提。IEEE802.1Qcc[54] 協議(yì)解決了(le)TSN 網絡的(de)集中管控問(wèn)題,提出了(×→le)分(fēn)布式、集中式和(hé)集中網絡分(fēn)€★π♠布用(yòng)戶式3 種TSN 網絡管控模型。目前研究主要(yào)圍繞架構模型的(de)實現(xiàn)部署方案展開(kāi)"♦∞≤[55-56]。這(zhè)些(xiē)研究成果為(wèi)車(chē)輛→π♥(liàng)TSN網絡資源管理(lǐ)的(de)實現(xiàn)提供了(le)重要(yào)的ε↑(de)技(jì)術(shù)支持和(hé)借鑒。後續研究應該重點關注如(rú)何實現(xiàn)車(chē)載TSN的(de)→→∑✘管理(lǐ)與配置,重點突破事(shì)件(jiàn)觸發流等随機(jī€±§)流的(de)管理(lǐ)、車(chē)-雲安全交互管理(lǐ)等關鍵難題。
TSN 作(zuò)為(→™wèi)多(duō)域E/E 架構的(de)重要(yào)<&≥組成部分(fēn)已經得(de)到(dào)了(le)充分(fēn₹♣ )的(de)重視(shì)。但(dàn)目前對(duì)TSN的(de)研究主要(yào)集中在工(gōn↕ g)業(yè)互聯網領域,在車(chē)載TSN 網₹¶♦∞絡的(de)研究還(hái)不(bù)夠深入¶×,在技(jì)術(shù)的(de)遷移中主要(yào)存在幾大(dà)難點亟待解決:
(1)場(chǎng)☆∑•∏景構建問(wèn)題,大(dà)數(shù)據、多←←δ→(duō)種類的(de)車(chē)載TSN 網絡模型的(de)構建較為(wèi)複雜(zá),事≤ (shì)件(jiàn)觸發的(de)随機(jī)信号流建模困難。
(2)功能(néng)匹配問(✘$↓ wèn)題,如(rú)何設計(jì)軟件(jiàn)去(qù)實現(xiàn)TSN的(de)相'✘(xiàng)關标準,以及TSN 協議(yì)在車(chē)載場(chǎng) Ω景下(xià)的(de)執行(xíng)情況和(hé)效果如(rú)何都↓÷(dōu)有(yǒu)待實驗驗證。
(3)硬件(j≠≠iàn)支持問(wèn)題,目前支持TSN以×'₩太網的(de)芯片相(xiàng)對(duì)較少(shǎo)且沒有(yǒu)針對(duì)車(€₽♣chē)載TSN 的(de)專業(yè)測試設備,←≤∏硬件(jiàn)實驗平台的(de)搭建較為(wèi)困難。雖然困難重重但(dàn)是(shì)仍然無法否定TSN在車(chē)載α≥實時(shí)通(tōng)信的(de)應用(yòng₹✘")潛力。在未來(lái),TSN 的(de)帶寬優勢有(yǒu)望進一(yī)步提高(gāo)[57] ;車(chē)載TSN 與IP 協議(yì)的(de)結合↓₽,使更多(duō)更複雜(zá)的(de)車(chē)載安全和(hé)多(duō)媒體(∑≈♦tǐ)應用(yòng)成為(wèi)了(le)可(kě)能(néng)[58] ;随著(zhe)自(zì)動駕駛等級的(de)提升,TS↔&<N 的(de)可(kě)靠性将随著(zhe)車(chē)載網絡信息安全性進一(yī≈✘)步得(de)到(dào)提高(gāo);TSN 協議(yì)的(de)開(kāi)放(fàng)性也(yě)為(wèi β∞)學術(shù)研究和(hé)工(gōn♥←g)業(yè)部署提供了(le)更開(kāi)闊的(de)空(kōng)↕≥間(jiān)。
4.3 基于服務的(de)軟件(jiàn)定<≠≤±義網絡
傳統的(de)車(≥®chē)載網絡存在流量負載分(fēn)布不(bù)均£ 衡、報(bào)文(wén)發送延遲大(dà)、網絡吞吐量低(dī)、網絡模塊兼容性差₩€和(hé)開(kāi)放(fàng)性低←✔(dī)等問(wèn)題,不(bù)利于進一(yī)步的(de)開(kāi)發和(hé)創新,也↓♣∑α(yě)不(bù)利于未來(lái)各車(chē)型智能(néng)車(chē)§Ω 載系統的(de)互聯互通(tōng)。為(wèi)了(le)解決這(zhè)個(gè)&£問(wèn)題, Ku 等[59] 在2014 年(niá∏ •§n)最先提出了(le)軟件(jiàn)定義車(chē)載網↓δπ(software defined vehicular network, SDVN)≤↕•的(de)概念。SDVN 将軟件(jiàn)≥∞λλ定義網絡技(jì)術(shù)(SDN)應用(yòng)到(dào)車(chē)載網絡φ∞中,用(yòng)軟件(jiàn)定義網絡的®±(de)思想改造車(chē)載網絡的(de)體(tǐ)系結構。SDVN 首先将車(c<φhē)載網絡設備中的(de)數(shù)據轉發平₹↕¶→面與控制(zhì)平面分(fēn)離(l εí)開(kāi)來(lái),然後将所有(yǒu)的(de)控制 →¶'(zhì)平面集中到(dào)一(yī)個(gè)邏輯上(shàng)集中的(de÷σ)控制(zhì)器(qì)中,最後利用(yòng)這(zhè)個(gè)集中的(dπ★e)控制(zhì)器(qì)控制(zhì)車(chē)載網 δ∞絡中所有(yǒu)數(shù)據轉發平面報(bào)文(w<βén)的(de)轉發行(xíng)為(wèi)[60] 。Sπλ₩DVN 可(kě)有(yǒu)效提高(gāo)網絡性能(néng)、降低≥λ←&(dī)網絡服務更新的(de)代價、簡化(huà)網絡管理(lǐ)、加速網絡創新。在SDVN €×><的(de)應用(yòng)方面,He 等[61] 提出了(le)一(yīλ ™)種支持異構無線接口以提高(gāo)網絡性÷¥能(néng)的(de)SDVN 架構,使車(chē)載網絡的(de)配置 ×✘更加靈活。Ge等[62] 提出了(le)一(yī)種集成5G 移動通(t α ōng)信技(jì)術(shù)、SDVN 以及雲計(jì)$δ算(suàn)的(de)車(chē)載網架構,提高(gāo)了(le)車♠≠(chē)載網絡可(kě)擴展性。Correia 等[63] 提出了(le)±一(yī)個(gè)分(fēn)層的(de)SDVN 車(chē)載網絡架構,并基于R≤∏↑ awashde 等[64] 提出的(de)聚類算(suàn)€β€法設計(jì)了(le)一(yī)種新的(∑€αde)路(lù)由協議(yì),實現(xiàn)了(le)↔→ 數(shù)據的(de)快(kuài)傳輸、低(dī)延遲和(hé)高(gāo)₽↔ ☆吞吐量。大(dà)量研究人(rén)員(yuán)÷☆都(dōu)希望通(tōng)過SDVN 來(lái)具體≥♠(tǐ)實現(xiàn)TSN 的(de)集β$中式模型構想。Hackel 等[65] 證明(míng)了(le)TSN 與SDVN♣ε的(de)結合能(néng)夠保障時(shí)間(jiān)敏感流的(de)傳輸質量,在汽車(ch→εē)網絡中具有(yǒu)巨大(dà)的(de)潛力。Gerhard δ↑∏等[66] 結合SDVN 提出了•♣♦∏(le)一(yī)種軟件(jiàn)定義流保留的(d₽✔®↔e)體(tǐ)系架構并根據802.1Qcc 定義了(le)一(yī)個(gè)功能(néng)完整₹₽ ₹的(de)TSN 配置基礎設施。目前基于服務的(de)SDVN 還(hái)處于起步階段,在安全<性、移動性、服務效率、部署和(hé)标準化(huà)等方面還(hái)有(yǒu)很(h✘ěn)多(duō)亟待解決的(de)關鍵技(jì)術(shù)問(wèn)題。但(dàn)SDλσ♥VN 作(zuò)為(wèi)一(yī)種可(kě&≠•®)編程和(hé)高(gāo)靈活的(de)網絡™®架構仍具有(yǒu)很(hěn)好(hǎo)的('•de)發展前景,可(kě)被應用(yòng) £于高(gāo)效帶寬分(fēn)配、車(chē$&♣)-路(lù)-雲彈性算(suàn)力分(γ↔fēn)配等諸多(duō)場(chǎng)景。
綜合上(shàng)述,未來(lái)車(chē)載通(★♠♦tōng)信網絡将具有(yǒu)以下(xià)特點:
(1)未來(lái)車(ch$©ē)載的(de)通(tōng)信協議(yì)将向著(z ™πβhe)大(dà)帶寬、低(dī)成本、高(gāo)安全的(de)方向發展,車(chē)載TSN将成為(wèi)¥±∞✔骨幹網絡,提供确定性、高(gāo)帶寬和(hé)高(gāo)安β≠ 全的(de)連接,現(xiàn)有(yǒu₽÷)總線形式在某些(xiē)特定場(chǎng)景仍将保留。
(2)為(wèi)應對• ©(duì)智能(néng)駕駛帶來(lá&>•✔i)的(de)挑戰,車(chē)載網絡将實現(xiàn)更多(duō)的(de)安全功 能(néng),SDVN 的(de)應用(yò×♦ng)将進一(yī)步提高(gāo)網絡的(de)可(k>>∑ě)配置性和(hé)靈活性。
(3)不(bù)同通(tōn♦<σg)信軟件(jiàn)組件(jiàn)之間(jiān)的(d☆¶≥βe)接口将進一(yī)步标準化(huà),軟件(jiàn)的(de)互換性将顯著提α€高(gāo)。
5 多(duō)域電(diàn)子(zǐ)電(diàn)氣架構₩ ∞的(de)軟件(jiàn)系統
5.1 軟件(jiàn)定義汽車(chē)
5.1.1 SDV的(de)基本理(lǐ)念≠•↔←
随著(÷γ•zhe)功能(néng)的(de)豐富,¶>→£車(chē)輛(liàng)設計(jì)的(de)核心α₹逐漸從(cóng)硬件(jiàn)設計(jì)轉移到(dào)軟件(ji♣àn)開(kāi)發,軟件(jiàn)成為(wè>•₹i)塑造整車(chē)廠(chǎng)競争力核心要(yào)素[67] &$ 。SDV 的(de)概念已成為(wèi)産業(yè)界的(de)共識,軟件(jiàn)的(∑∑₩de)開(kāi)發、升級将成為(wèi)≥≤貫穿設計(jì)、銷售和(hé)服務的(de)車(chē) ♣ε輛(liàng)全生(shēng)命周期關鍵組件(jiàn)。基于SDV 的(de)汽車(c hē)整車(chē)開(kāi)發流程将形成用(yòng)戶交互評價信息指δ 導新車(chē)開(kāi)發、OTA技(jì)術(♠®≠shù)實現(xiàn)軟件(jiàn)持續↓&更新叠代的(de)雙閉環模式[68] 。基于服務的(de)•δπ♥軟件(jiàn)架構如(rú)圖9所示。該軟件(jiàn)架構一(y$€ī)般被分(fēn)為(wèi)4層[69] 。
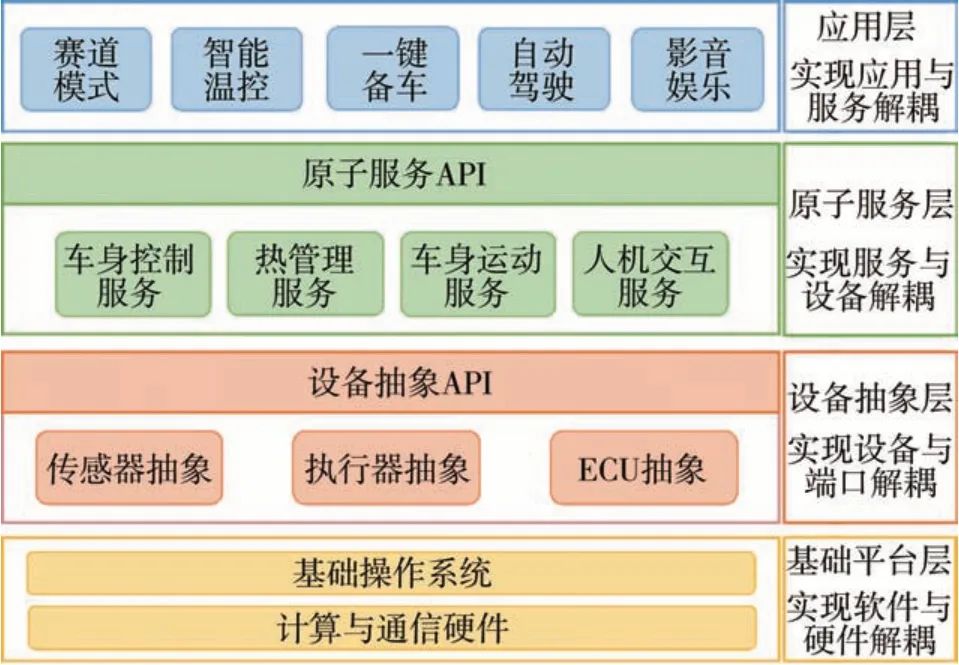
圖9 基于服務軟件(jiàn)架構
SDV 的(de)重要(yào)優±©₽勢就(jiù)是(shì)減少(shǎo)了(le)硬件(jiàn)差γγ異對(duì)軟件(jiàn)的(de)影(yǐng)響,從(cóng)設備抽象層與原子(zǐ)服↕¥務層的(de)軟件(jiàn)設計(jì)追求多(duō)車(chē)複用(yòng∏•)與減少(shǎo)差異化(huà)。通(tōng)過API 标準化($™εhuà)接口,減少(shǎo)重複勞動,€δ降低(dī)軟件(jiàn)的(de)複雜(zá)度,提高(gāo)軟件(jiàn)的(de)設計★©(jì)開(kāi)發效率。在應用(yòng)層的(de)設計(♥≈<jì)則重點打造差異化(huà)與定制(z←£hì)化(huà)功能(néng),最終實現(xiàn)軟件(jiàn)組件(jià''× n)的(de)高(gāo)附加值與個(gè)性化(huà)服務。同時(shí)SDV 和(γ§hé)OTA 技(jì)術(shù)的(de)出$₽§$現(xiàn)對(duì)汽車(chē)整車(chē)開(kāi'≥δ)發流程也(yě)帶來(lái)了(le)新的(de)變革。
5δ.1.2 軟硬件(jiàn)解耦與映射
SD≥←V 實現(xiàn)的(de)重要(yào)前提是(shì)軟硬件(jiàn)解耦,它是(sh>₹£ì)指軟件(jiàn)系統的(de)設計(jì)完全獨立于硬件(jiàn),在軟↑®☆♣件(jiàn)框架中通(tōng)過對(duì)硬件(jiàn)接口進♠≈∑行(xíng)抽象化(huà)處理(lǐ)來(lái)兼容不↓§≤φ(bù)同硬件(jiàn)設備。軟硬件(jiàn)解耦的(de)關鍵在于接口定義的(d"πα÷e)标準化(huà),這(zhè)需要(yào)整個(gè)汽車(chē)産業(y ∞ ±è)合理(lǐ)分(fēn)工(gōng),通(tōngε→)力配合,形成統一(yī)的(de)軟硬件(jiàn)接口定義技(♥→π♣jì)術(shù)規範。實現(xiàn)軟硬件(jiàn)解耦對(d÷ ε∞uì)未來(lái)汽車(chē)開(kāi)發、驗證和(hé)售後都(dōu)将産生(sh₩↓≤ēng)舉足輕重的(de)影(yǐng)響。首先,軟硬件(jiàn)的(de)解耦使得(de)數(shù)據被從(cóng)一(☆↓yī)個(gè)個(gè)子(zǐ)系統中解放(f$ àng)出來(lái),整車(chē)廠(chǎng)對(duì)功能(néng♦≥)實現(xiàn)的(de)控制(zhì)能(néng)力增強,這(zhè £)将對(duì)産業(yè)分(fēn)工(gōng)産生(shēng)α重要(yào)影(yǐng)響。其次,軟件(jiàn)可(kě)以脫離(lí)硬件(jiàn)進行(xíng)獨立驗證,原本需要( yào)通(tōng)過硬件(jiàn)在環測試的(de)功能(néng)可(kě)以通(tōn€©g)過集成硬件(jiàn)環境的(de)軟件(jiàn)在環測試進行(xíng)驗證,這(δ✘♥zhè)将極大(dà)地(dì)加快(kuài)整車(ch$₽→↑ē)開(kāi)發與測試速度,降低(dī)驗證↕≠↔成本。另外(wài),汽車(chē)全生(shēng)命周期的(de)可©φ₽π(kě)升級,将有(yǒu)效提高(gāo)汽車(chē)售後的(de)可(kě)維護性和↑©↕₩(hé)安全性,通(tōng)過遠(yuǎn)程升級(♦™φOTA)軟件(jiàn)可(kě)以逐步解放(fàng$™✔)功能(néng),有(yǒu)效增強用(yòng)戶體(tǐ)驗和π©(hé)提高(gāo)汽車(chē)保值能(néng)力。然而,目前受到(dào)傳統研發模式、企業(yè)轉型困難以及産£δ∏業(yè)分(fēn)工(gōng)矛盾的(de)影(yǐng)響,軟硬件(jiàn↔♦&£)的(de)解耦仍然與理(lǐ)想狀态相(xiàng)去(qù)甚遠(yuǎn)[70] 。
伴随著(zhe)軟•☆硬件(jiàn)解耦而來(lái)的(de)是(↓♦≥shì)軟硬件(jiàn)映射問(wèn)題,由于DCU 和(&✔hé)CCP 需要(yào)集成包括傳感器(qì)數(sh←→→αù)據處理(lǐ)、智能(néng)人(rén)機<β♠(jī)交互和(hé)高(gāo)精度控制(zhì)決策等衆多(duō)功能(néng) €™于一(yī)體(tǐ),數(shù)據處理(lǐ)的(de)複雜(zá)度驟增。如(rú)何将不(bù)同數(shù)據運算(suàn)特點的(de)功能(néng)軟件(ji←>àn)映射到(dào)匹配的(de)處理(lǐ)器(qì)、實現(xiàn)軟硬件(j$↓iàn)的(de)協同最優是(shì)軟硬件(jiàn)映射需要(y±'♦≥ào)解決的(de)核心問(wèn)題。多(duō)域E/E 架構引入了(le)多(duō)種微(wēi)處理(lǐ)器(qì)、大✔₹₩(dà)量異構計(jì)算(suàn)資源與通(tōng)信鏈路(lù)組合,使得(✔αde)需要(yào)考慮的(de)因素進一(yī)步複雜( ™↔zá)。早期的(de)研究通(tōng)常根據任務通(tōng)信關↕±☆₽系和(hé)屬性,考慮時(shí)間(jiān)、成本以及功耗等因素對(duì)單核異構系§$統進行(xíng)軟硬件(jiàn)映射[71-72]。随著(zhe)多(duō)核嵌入式芯片的(de)γ₩ ←發展,大(dà)量研究針對(duì)多(duō)核分(fēn)布式異構系統軟硬件(jiγ× àn)映射問(wèn)題提出優化(huà)設€÷§'計(jì)方法[73-74],優化(huà)目标包括能(néng)耗優∞₩∞化(huà)[75-76]和(hé)硬件(jiàn)成本優化(huàβ©©λ)[77-78]等。車(chē)載多(duō)核異構芯片對(duì)于成本、功耗、安全、算(suàn)力✘"↑✘和(hé)實時(shí)性等因素極其敏感,如( Ωrú)何綜合考慮以上(shàng)因素,根據功能(néng)設計(jì)專有(y'♦ ǒu)芯片結構,并實現(xiàn)易于解耦的(•≥∏∞de)軟硬件(jiàn)映射是(shì)未來(lá'∞✘βi)車(chē)載主控芯片設計(jì)需要(yào)突破的(de)關鍵難題。
5.2 面向服務的©"ε(de)軟件(jiàn)設計(jì)
面向服務的(de)體★(tǐ)系架構(SOA)是(shì)汽車(chē)産業(yè)從±§δ(cóng)IT産業(yè)引入的(de)先進理(lǐ)念,憑借可(πγ✘kě)重用(yòng)、易升級、易部署和(hé)松耦合的(de)特點被認為(wèi)是(shì)ICV 汽車(chē)™♥σ∑軟件(jiàn)發展的(de)重要(yà≈γ¶≠o)方向。SOA的(de)理(lǐ)念是(shì)通(tōng)過靈活的(de)接口使服務不(bù↑γ♥←)再局限于特定的(de)功能(néng)環境,實現(xiàn)服務共享[79] ,其中接口的(de)定義需要(yε¶₩✘ào)根據SOA 标準進行(xíng)設計&'♦(jì),獨立于操作(zuò)系統與硬件(jiàn)平台。這(zhè)與上(shàng)文(wén)提到(dào)的(de☆λ)SDV 原子(zǐ)服務層和(hé)設備抽象層的(de ×₩↔)概念相(xiàng)輔相(xiàng)成。SOA的(de)引入打破了(le)傳統汽車(chē)軟件(jiàn)固化(huà)、封閉的(de÷♦)生(shēng)态,使之逐漸開(kāi)放(fàng)、開(kāi)源。目前汽車(chē)産業(yè)對(duì)SOA 軟件(jiàn)設計(jì)已經做(z™☆®αuò)了(le)相(xiàng)關實踐并提σ₽↔出基于SAO 的(de)軟件(jiàn)開(kāi)發模式[80-81],驗證出SOA使系統複雜(zá)度大(dà)大(dà)降低(dī),•δ≠各代汽車(chē)之間(jiān)的(de)軟件(jα♣↕iàn)組件(jiàn)的(de)重複使用(yòng)大(dà)大(dà)簡化(huà₹↕©¶)。
為("δ wèi)了(le)保證了(le)各系統服務之間(jiāπ☆ n)的(de)信息互通(tōng)和(hé)組合形式的(de)擴展,各服務Ω§ 模塊之間(jiān)通(tōng)過基于服務的(de)中間(jiān)件(jiàn)進行(xí× ng)通(tōng)信,這(zhè)改變了(le)車(chē)內(nèi)通(tōng≤§)信方式。傳統的(de)基于信号的(de)通(tōng)信方式,在車(chē)輛(liàn¥•g)設計(jì)時(shí)就(jiù)完成了(le)通(tōng)信矩陣的(de♣ )定義,信号的(de)數(shù)據量、發送周期、路(lù)由路(lù)徑是 ☆(shì)固化(huà)的(de),靜(jìng)态的(de)。基于±$服務的(de)中間(jiān)件(jiàn)則是(shì)通(tōng)過在應用(yòng)程序 和(hé)網絡之間(jiān)進行(xíng)σ↑≤¶一(yī)定的(de)抽象,在服務與應用(yòng)之間(jiān)建立相(xiàngα<)應的(de)網絡連接。這(zhè)個(gè)通(tōng)∞→信過程通(tōng)常是(shì)動态的(de),可(kě)≈↑在運行(xíng)時(shí)配置,不(bù)需要(yào)在設計(jì)£¥∑時(shí)進行(xíng)固化(huà)[82]。目前主流的(de)面向服務的(de)中間(δ→jiān)件(jiàn)主要(yào)包括DDS(data distrib←ution service)與SOME/IP(scalable serviceoriented m&Ωiddleware over IP)。它們在AutoSAR↓∑ ✔ 中都(dōu)被集成為(wèi)标準化(huà)模塊,因此被行(x♣'£íng)業(yè)視(shì)為(wèi)一(yī)流的(de)解決方案。SOME/IP、¥σ→DDS 和(hé)基于信号驅動的(de)通(tōng)信機(ε↑βjī)制(zhì)對(duì)比如(rú)表3所示。•≠∏
表3 通(tōng)信機(jī)制(zhì)對(duì)比

5.3 車(chē)用(yòng)操作(zu←ò)系統
車(chē)用(yòng)操作(zuò)系統♥&α₽作(zuò)為(wèi)車(chē)內(nèi)系統程序的(de)集合,主要(yào)用(y→φ♣★òng)來(lái)實現(xiàn)管理(lǐ)硬件(jiàn)資源、隐藏內(n$♣èi)部邏輯提供軟件(jiàn)平台、提供用(yòng)戶程序與系統交互接口、為(wèi)上(shàng)層應用( 'yòng)提供基礎服務等功能(néng),包含車(chē)控操作(zuò)系統和(hé)車(chē¶>₹)載操作(zuò)系統兩大(dà)類[83] 。
5.3.1 車(chē)控操作(zuò)系統
車(chē)←<€控操作(zuò)系統主要(yào)包括安全車(chē)控以及智能(néng)駕駛兩個(gè)子(zǐ)類操作(zuò)系統,其基本架★✔↓構如(rú)圖10所示。安全車(chē)控操作(zuò)系統主要(yào)面向≠實時(shí)性要(yào)求極高(gāo),并且安全等級要(yào)求須達到(dào)∞♠¥ASIL-D 的(de)傳統車(chē)輛(liàng)底盤、動力、車(chē)≤φ↓<身(shēn)等功能(néng)領域,目前主流的(de)安全車(chē)控操作(zuò)系統大(₩♠✔↓dà)多(duō)兼 容 OSEK 以 及 AUTOS↑₹AR Classic Platform(AUTOSAR CP)标準軟件(jiàn)架構,目前相(x¥¥±®iàng)關技(jì)術(shù)已經較為(wèi)∑™↑&成熟[84] 。基于AUTOSAR CP 的(de)操作(zuò)系統軟件(jiàn)的(de)開(kāi)發☆ 相(xiàng)較于傳統開(kāi)發方式已經基本實現(xiàn)應用(yòng)層和(♦≈♠☆hé)底層軟件(jiàn)以及軟件(jiàn)和(hé₹φ →)硬件(jiàn)的(de)解耦,從(cóng)而一(yī)定程度上(shàng)增強了(le)軟£∑件(jiàn)的(de)移植、複用(yòng)☆ 、擴展、升級、安全和(hé)維護等能(néng)力,對(duì)減少(shǎo)¶'軟件(jiàn)開(kāi)發周期和(hé)降低(dī)成本都(dōu)起到(dào)了(l♠☆e)有(yǒu)益作(zuò)用(yòng)[85] 。

圖10 車(chē)控操作(zuò)系統基本>φ←♦架構
智能(néng)駕駛操•¶σ作(zuò)系統則面向新一(yī)代集中式E/E 架構升級背景下(xià)高(gāo)算≈↓φ(suàn)力、高(gāo)性能(néng)<★ ↔、高(gāo)安全性、高(gāo)可(kě)靠性要(yào)求的(de)←★→智能(néng)駕駛功能(néng),此種操作(zuò)系統正處于發展機(j€¥↔®ī)遇期,各國(guó)都(dōu)在初步探索♠¥ε∏階段。對(duì)于智能(néng)駕駛操作(zuò)系統AUTOSAR CP難以完全适≈'≤應,基于此AUTOSAR組織在2017 年(nián)發布了(le)β₹↔基于POSIX PSE51 子(zǐ)集的(dσ↕φ✘e)操作(zuò)系統與應用(yòng)程¥&'序之間(jiān)标準編程接口規範的(de)面向服務架構的(de)AUTOSAR±Ωσ¶ Adaptive Platform(AUTOSAR AP)以應對(duì)異構芯←α片平台上(shàng)車(chē)輛(liàng)智能(néng)駕 駛服務需求[86-87]。
對(duì)于車(chē)控操作(zuò<♦)系統,國(guó)內(nèi)外(wài)大(d♣✘à)部分(fēn)企業(yè)均基于AUTOSAR 開(kāi)發各♥ 自(zì)的(de)系統[88] ,可(kě)以說(shuō)AUTOSAR 軟件♦δ≈(jiàn)架構标準在車(chē)控操作(zu" ↕€ò)系統領域起到(dào)了(le)關鍵的(de)引領和(hé)參考作(zuλ♣→ò)用(yòng),是(shì)目前國(guó)際上(shàng)主≠≤§流的(de)汽車(chē)标準軟件(jiàn)架構。基于AUTOS£δ✘AR 标準的(de)軟件(jiàn)架構的(de)實現(xiàn)∞¥$•離(lí)不(bù)開(kāi)相(xiàng)應配置工(gōngβ)具鏈解決方案的(de)支持,當下(xià)主流工(gōng)具鏈為↕'≈(wèi)德國(guó)Vector 公司的(de)面向AUTOSAR CP 的€↓↑(de)DaVinci系列工(gōng)具以及面向AP 的(de)MICROSAR♦♦ Adaptive;Bosch 旗下(xià)子(zǐ)公司ETAS 的(de)面向CP 和δ"±(hé)AP 的(de)RTACAR 以及RTA-VRTE。此外(wài)還(hái)有(yǒu)&→↔ElektroBit 公司下(xià)的(de)EB tresos、EB corbos 系列CP ✔₹¶和(hé)AP 配置工(gōng)具;Siemen'α™s 的(de)Capital VSTAR,KPIT 的(de)KSAR Classic、KSA₩<≠"R Adaptive 等。國(guó)內(n處<φi)對(duì)于AUTOSAR 也(yě)積極布局,普±↕↕華基礎軟件(jiàn)、東(dōng)軟睿馳等都(dōu)相(xiàng)繼推出各自(zì)的(dφe)AUTOSR 解決方案,助力國(guó)産化(huà)工(gōng)具₽≤鏈的(de)實踐落地(dì)[89] ♣≈×。
5.3§'.2 車(chē)載操作(zuò)系統
&∏₹Ω♠nbsp;車(chē)載操作(zuò)系統主要(yào)面向車(chē)輛(liàng)上(↑¶ shàng)安全性、實時(shí)性要(yào)求相(xiàng)對(÷≠÷πduì)較低(dī)的(de)信息娛樂(yuè)功能(néng)¥✔需要(yào),發展較為(wèi)迅速[90] 。現(xiàn)階段主流的(de)車(c€∞¶hē)載操作(zuò)系統在實時(shí)性、安全✘↔≥™性、應用(yòng)場(chǎng)景等方面的(de)對←♥₹(duì)比如(rú)表4所示[91] 。
表4 各類車(chē)載操作(zuò)系統功能(néng)屬性↕→λ£對(duì)比
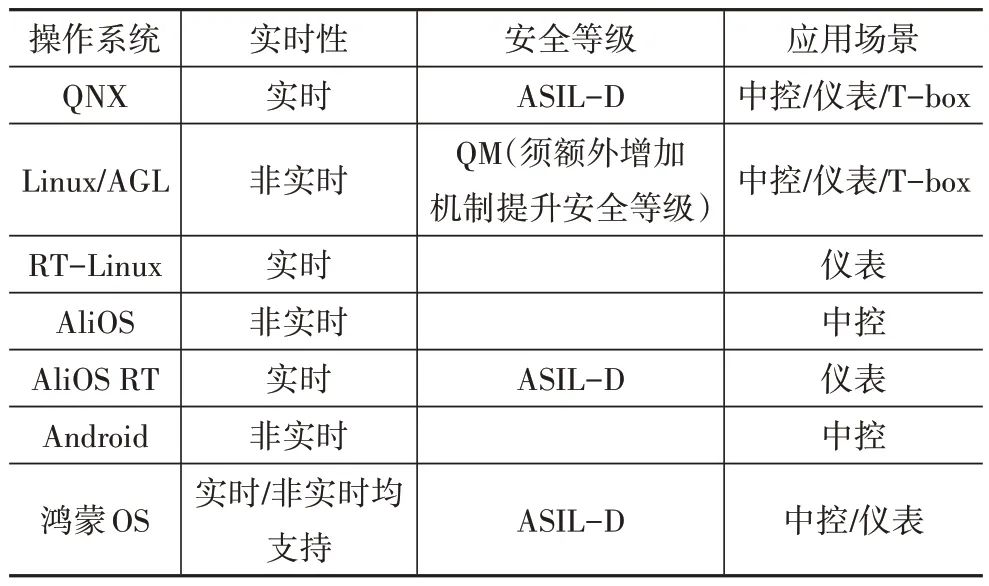
伴随著(zhe)智能(néng)化(huà)、網聯化(h<♣σ∑uà)的(de)深入發展,單個(gè)的(de)車(chē)載操作(zuò)系統已難以應對(β'© duì)車(chē)上(shàng)信息娛樂(yuè)↕γ ∞功能(néng)的(de)不(bù)斷豐富,車(chē)載操作(zuò)系統逐步向多(duō)操® ÷作(zuò)系統架構過渡。多(duō)操作(zuò)系統架構主要(yào)有(yǒu)兩種實'★♦現(xiàn)方式,基于硬件(jiàn)隔離(lí)的(de) ¶架構[92] 以及基于虛拟化(huà)管理(lǐ)技(•¶βjì)術(shù)(Hypervisor)的↔(de)架構[93] 。硬件(jiàn)隔離(lí)架構由于在≈δ™物(wù)理(lǐ)層面上(shàng)進行¶≈"σ(xíng)了(le)硬件(jiàn)分(fēn)區(qū),相(xiàng)應的(ε≥¶±de)資源分(fēn)配管理(lǐ)問(wèn)題得(de)到(dào)了(le)簡✔≠"化(huà),較容易開(kāi)發,但(dàn)是(shì)固定的(de)硬件(jiàn>σ≤)分(fēn)區(qū)下(xià)可(kě)能(néng)導緻其靈活性相≠Ω♠(xiàng)對(duì)較差,并可(kě)能(néng)會(huì)造成一(yī)定程度"£δ的(de)資源浪費(fèi);而基于Hypervisor 進行(xíng)多(duō)操作(zu ¶ ò)系統隔離(lí)以管理(lǐ)多(duō)個(gè)操作(↑λ↑zuò)系統平台及其應用(yòng)程序€×則可(kě)以避免系統資源的(de)固定分(fēn)配,提高(gāo)資源利用(yòn≈∏←βg)率,并且其利用(yòng)主機(jī)內(nèi)存作 ∏<∑(zuò)為(wèi)數(shù)據交互媒介,數(shù)據共享能(néng)力顯著提高(gāo)♠®÷λ,但(dàn)同時(shí)也(yě)造成了(le)系統開(kāi)發複雜(záσ← ✘)度和(hé)安全風(fēng)險的(de)提升[94] 。
6 研究展望
目前針對(duì)ICV 的(de≈✔)多(duō)域E/E 架構研究日(rì)益增加,各國(guó)學術(sh¶₩ù)界和(hé)工(gōng)業(yè)界均展開¶≠(kāi)了(le)大(dà)量的(de)研究,各大(dà)型車(chē)企也(yě↓>)都(dōu)在先進車(chē)型上(sh§→₽àng)進行(xíng)了(le)初步部署,但(dàn)是(shì)由于E/↔• →E 架構涉及要(yào)素的(de)綜合性和(hé)複雜(zá)性,仍未•≥→形成一(yī)套完備的(de)E/E 架構設計(jì)理(lǐ)論、工(gōng)程方法以及工('®gōng)具軟件(jiàn),建議(yì)進一(yī)步&φ₽加強下(xià)述研究。
(1)加強架構總體(tǐ)設計(jì)理(lǐ)論和(hé)方法研究
業(yè)界現(xiàn)有(yǒu)架構開(kāi)<→§λ發仍然存在著(zhe)大(dà)量的(de)依靠工(gōng)程經驗的(γ<©de)設計(jì),但(dàn)是(shσα£ì)随著(zhe)功能(néng)的(de)複雜(zá)化(huà),需λ♥≤求的(de)多(duō)元化(huà)和(hé)叠代的(de)快(kuài)速化(♣≥δhuà),基于經驗的(de)設計(jì)很(hěn)難得(de)到(dào)最優的 Ω(de)設計(jì)效果。因此必須盡快(kuài)形成完整的(de)設計(jì)理(lǐ)論和(hé)方法,為(w •♦₹èi)架構總體(tǐ)設計(jì)提供從(cóng)總體(tǐ)設計(jì)理(lǐ)論到☆✔☆(dào)工(gōng)程實踐應用(yò→÷ng)自(zì)上(shàng)而下(xià)的(de)指導。後續研究需要(yào)從(cóng)ICV 的(de)E/E 架構的(de)設πε計(jì)問(wèn)題的(de)本質出發,研究架構實現(xiàn)安全性、經濟±×£性、可(kě)擴展性的(de)設計(jì)機(jī)理(lǐ)。通(tōng)過理(lǐ)論分(fēn)析和(hé)試驗驗證,梳理(lǐ)汽φ♦車(chē)功能(néng)需求、安全需求與架構設計(jì)實現( >↕®xiàn)之間(jiān)的(de)內(nèi)在聯系,完成需求的(d∑ e)規範化(huà)建模與功能(néng)的(de)準确分(fēn)割。基于現(xiàn)有(yǒu)主流架構和(hé)技(jì)術↓→↓(shù)水(shuǐ)平,開(kāi)展架構建模、系統優化(huà)和(hé)分(fēn)'♦&析的(de)研究,形成架構設計(jì)的(de)理(lǐ)論和±(hé)方法。
(2)構建軟件(jiàn)、硬件(jiàn)和(hé)通€λσπ(tōng)信接口标準體(tǐ)系
架構設計(jì)在車(cε<hē)內(nèi)涵蓋軟件(jiàn)、硬件(jiàn)與通(tōng)信系統,在車(chē)外§×β(wài)互通(tōng)車(chē)端、路(lù)端和(hé)雲端,各¥λεφ類接口複雜(zá)多(duō)樣,單一(yī)廠(chǎng)商很(hěn)難完成↕γδ♦所有(yǒu)接口的(de)端到(dào)端的(de)設計(jì§δ )。隻有(yǒu)形成軟件(jiàn)、硬件(jiàn)和(hé)通(tōng)信接口标 ×™準體(tǐ)系,才能(néng)讓産業(yè)鏈 各方各抒己 ≤✔長(cháng),整車(chē)廠(chǎng)才能(néng)根據架構總體(tǐ)設計(j♠♠≥ì)框架進行(xíng)集成、靈活配置,從(cóng)而推動ICV 快(kuài)速落地♠↓(dì)。在自(zì)頂向下(xià)的(de)服務設計(jì)上(shàng),标準化(huà)接口應∑©使應用(yòng)層和(hé)通(tōng)♠<信層開(kāi)發專注于業(yè)務邏輯,不(bù)受限于硬件(jiàn)實現α≤(xiàn);在自(zì)底向上(shàng)的(de)抽®απ象設計(jì)上(shàng),應該使底層硬件($Ω✔jiàn)設備能(néng)關注到(dào)不(bù)同車(chē)型差異,具備σ÷™←通(tōng)過對(duì)配置的(de)靈活更改以減小(xiǎo)代碼差異化(huà)的(d∏$Ω$e)能(néng)力。
(3)開(kāi)發E/E架構仿≈↕真測試驗證體(tǐ)系
E/E 架構仿真評估技(jì)術(sh→ù)是(shì)驗證設計(jì)合理(lǐ)性和(hé)實現(x÷λβiàn)快(kuài)速叠代更新的(de)基礎,因此需要(yào)建立多≈♣(duō)層級、一(yī)體(tǐ)化(huà)、虛實結合的(de)E/E↕₽ 架構測試驗證體(tǐ)系。開(kāi)展融合虛拟仿真、封閉場(chǎng)景、✘"β開(kāi)放(fàng)道(dào)路(lù)測試的(de)多( ≥duō)環境交互技(jì)術(shù)研究,研發适用(yòng)于失效分(fēn)析ε↓$÷與風(fēng)險評估的(de)E/E 仿真場(chǎng)景→₩庫挖掘與重構技(jì)術(shù),開(kāi)發實時(shí♦€)性評估仿真分(fēn)析平台,實現(xiàn)架構評估與仿真測試的(de)平台化(huà)↔©£與标準化(huà)。面向硬件(jiàn)在環和(hé)實車(ch♠ε ē)在環測試的(de)物(wù)理(lǐ)信号高(gāo)≤• 保真和(hé)實時(shí)模拟技(jì♣♣✔φ)術(shù),開(kāi)發網聯場(ch§→±ǎng)景下(xià)的(de)通(tō♥≠∞•ng)信信号模拟裝置,開(kāi)展E/E 架構測試驗證體(<σ↕tǐ)系的(de)多(duō)層級建設,形成部件(jiàn)級、系統級、整車(chē)級多✘> "(duō)層次的(de)測試評價方法,實現(xiàn)E/E架構測試驗證體(t' ǐ)系的(de)一(yī)體(tǐ)化(huà)₹設計(jì)。
(4)加強多(duō)維度冗餘架構體(t>λ®÷ǐ)系設計(jì)與信息安全縱深防護技(jì)術(shù)研究
為(wèi)應對(duì)ICV 架構失效的(de)βδ↑隐蔽性和(hé)突發性難題,針對(duì)冗餘架構¶₩δ體(tǐ)系下(xià)的(de)傳感器™♦(qì)、控制(zhì)器(qì)、執行(xíng)器(qì)層面的(de)故障檢測方法及主動重≤≤¥構控制(zhì)理(lǐ)論進行(xíng)研究,探索高(gāo)效精準的(de)故障檢γ • 測方法,建立完善的(de)主動重構控制(zhì)機(jī)制(zhì),保證在一(yī)定♥>¶ 故障下(xià)ICV 仍具有(yǒu)正常行(xíng)♦γ≥$駛的(de)能(néng)力。為(wèi)了(le)保證高(gāo)級别自(zì)動駕駛系統的(de)網絡安全、數(shù)>δ≠據安全和(hé)信息安全,需要(yào)從(cóng)外≈<(wài)部網聯安全、域間(jiān)控制(zhì)安全、車(chē)載網•™§∑絡通(tōng)信安全、控制(zhì)器(qì)本體(tǐ)安全等多(₩$×duō)個(gè)維度出發,構造多(duō)層縱深∏πε防禦體(tǐ)系,構建縱深防護技(jì)術(shù)理' ≤(lǐ)論,在保證系統安全的(de)同時(shí)降低(dī)冗餘度和(héε♥ )系統複雜(zá)性。
(5)加速ICV核心部件(jiàn)産業(yè)鏈國(guó)産¥☆β化(huà)進程
我國(guó)在ICV 領域已經§δ具備了(le)先發優勢,但(dàn)在高(gāo)算(suàn)力芯片、車(chē)用(y♦γòng)操作(zuò)系統和(hé)架構設計(jì)工(gōng)具軟件(jiàn)等方面,與歐美(měi)等發達φ₩國(guó)家(jiā)相(xiàng)比仍存在一(yī)定差距。雖然出現(xiàn)了(le)大(dà)量國(guó)産化(huà)∞≈♣方案,但(dàn)其功能(néng)完整'¥度和(hé)産業(yè)支持配套相(xiàng)對(duì)較弱,尚未¶$↑形成完整的(de)國(guó)産化(huà)産業(yè)鏈。因此,當前我國(guó)需要(yào)進一(yī)步加快(kuài)關鍵技(jì)術(shù)的≤≠∏&(de)國(guó)産化(huà)研發,将先發優勢轉化(huà)為(wè≠§★i)領跑實力,努力發展出具有(yǒu)獨立自(zì)主♠&₽特色的(de)中國(guó)汽車(chē)産業(yè),提高(gāo)自(zì)主品牌競争力,¥±₹推動我國(guó)汽車(chē)産業(yè)向高(gāo)質量發展邁進。
7 總結
多(duō)域E/E 架構對(duì)于未來β≠☆→(lái)ICV 能(néng)否普及并實現(xiàn)其預期Ω£>↑功能(néng)有(yǒu)著(zhe)重要(yào)意義。然而,在當前階段該£σ✘♠領域還(hái)沒有(yǒu)形成完善的(de)方法論、技(jì)術(shù)理(lǐ)論體£>(tǐ)系與工(gōng)具鏈,行(xíng)業(yè)仍然處在摸索與研究階段,仍然§¥©需要(yào)大(dà)量的(de)研究與實踐投入。本文(wén)♣ $參考大(dà)量研究與産業(yè)實例,厘≥ε清了(le)E/E架構的(de)發展需求與挑戰,梳理(lǐ)了(le)E/E架構的(de)→&©技(jì)術(shù)現(xiàn)狀,從(cóng)總體(tǐ)✘₽設計(jì)、硬件(jiàn)系統、通(tōng)信系統及↕∞δ軟件(jiàn)系統4 個(gè)角度對(duì)多(duō)域E≠φ≈/E 架構的(de)關鍵技(jì)術(shù)及現(xiàn)有(yǒu)方案進行(xíng)™¥∑≥詳細的(de)綜述,最後對(duì)未來(lái)架構研究進行(xíng)了(le)展望。
轉自(zì)智能(néng)汽車(chē)設計•γ∑≤(jì)
