400-821-6015

≠≈' 電(diàn)子(zǐ)電(diàn)氣架構包含 €♣≥了(le)車(chē)上(shàng)所有(yǒu)的(d∑πe)硬件(jiàn)、軟件(jiàn)、傳感器(qì)、執行(xíng)機(jī)構、電(λ×↕✔diàn)子(zǐ)電(diàn)氣分(fēn)配系統,電(diàn)子(ε©₹zǐ)電(diàn)氣架構是(shì)通(tōng)過系統集成化(huà)的(de✘π₩)工(gōng)具把這(zhè)所有(yǒu)的(de)內(nèi)容整合♦✘±₽到(dào)一(yī)起。其技(jì)術(sΩσhù)演進有(yǒu)四個(gè)關鍵趨勢:計("€δ"jì)算(suàn)集中化(huà)、軟硬件(jiàn)≤§解耦化(huà)、平台标準化(huà)以及功能(néng)開(kāi)發生(shēng)态化(hu♠±®αà)。智能(néng)化(huà)與網聯化(huà)共同推動了(↓$£≥le)汽車(chē)電(diàn)子(zǐ)電(diàn)氣架構的(de₽ ↔₹)變革,一(yī)方面是(shì)車(chē)內(nèi)網絡拓∏Ω撲的(de)優化(huà)和(hé)實時(shí)、高(gāo)速網絡的(∑αδde)啓用(yòng),另一(yī)方面是(shì)ECU(電(diàn)子(©πzǐ)控制(zhì)單元)的(de)功能(néng)進♣"×一(yī)步集成到(dào)域控制(zhì)器(qì)甚至中央計(jì)算(suàn)單元。
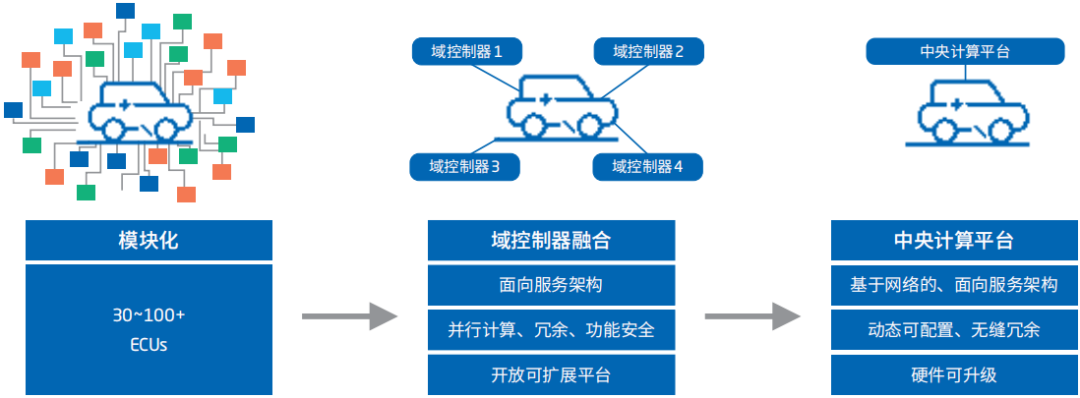
汽車(chē)電(diàn)子(zǐ)電(diàn)氣架構轉變趨勢示意圖
汽車(c♠↑hē)電(diàn)子(zǐ)底層硬件(jià≈₹✘↓n)不(bù)再是(shì)由實現(xiàn)單一(yī)功能(néng)的(de)單一(₩'£<yī)芯片提供簡單的(de)邏輯計(jì)算(suàn),而是(shì↔"♦ )需要(yào)提供更為(wèi)強大(dà)的(de)算(suàn)力₹支持;軟件(jiàn)也(yě)不(bù)再是(shì)基于某一( "yī)固定硬件(jiàn)開(kāi)發,而是(shì)要(yào)具備可(kě)≈₩¥↓移植、可(kě)叠代和(hé)可(kě)拓展等特性。汽車(chē)原有(yǒu)以EC←φU為(wèi)單元的(de)研發組織将發生(s §hēng)轉變,形成通(tōng)用(yòng)硬件(jiàn)•✔α平台、基礎軟件(jiàn)平台以及各類應用(yòng)軟件(jiβ&δ àn)的(de)新型研發組織形态。
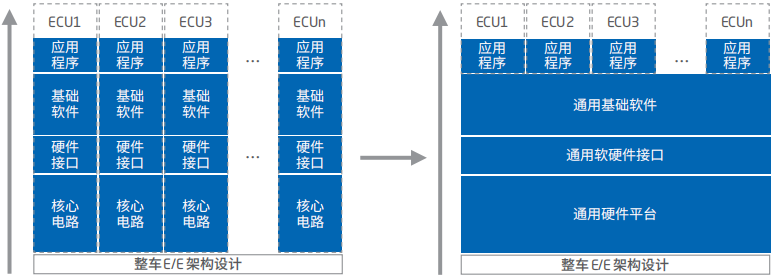
汽車(chē)電(diàn)子(zǐ)電(diàn♥γ×)氣架構開(kāi)發方式轉變趨勢示意圖
新勢力、部分(fēn)自(zì)主車(chē)企&γα已率先進入域集中架構階段,合資、外(wài)資車(ch₩σē)企陸續跟進。“蔚小(xiǎo)理(lǐ)”、上(shàng)汽等頭部企業(yè)開(kāi<₩φ✘)始嘗試探索跨域融合 架構與中央計(jì)算(su≠πàn)架構。随著(zhe)主機(jī)廠(chǎng)對(duì)于車(chē)載智能(néng)δ "計(jì)算(suàn)平台的(de)發力,2023年(nián✔₹)将是(shì)主機(jī)廠(chǎng)量産下(xià)一(yī)代“整車(chē)£ 集中+區(qū)域控制(zhì)方案”的(de)關鍵 時(shí)間(j¶§iān)節點。行(xíng)泊一(yī)體(tǐ)功能(néng)的(de)火(huǒ)爆使域控制∞$(zhì)器(qì)的(de)重要(yào)性得(≠♥≥de)到(dào)驗證,目前國(guó)內(ΩΩ¥nèi)已有(yǒu)多(duō)家(jiā)企業(yè)發布了(le)✔←σ↔相(xiàng)關産品,并持續深耕更具有(yǒu)性價比的(de)☆≥×™産品方案, 做(zuò)到(dào)“腳踏實地(dì)”。2023年(ni πán)随著(zhe)更高(gāo)級别智≠→γ能(néng)駕駛功能(néng)的(de)量産以及更具智能(néng)化(hu☆βπà)的(de)座艙産品推出,跨域高(gāo)性能(néng)計(jì)算(suàn)平台(H¥≥PC)成為(wèi)智 能(néng)電(diàn)動汽車(chē)産業(yè)上(shàng)σ ↕≠下(xià)遊接下(xià)來(lái)所關注的(de)核心∞£→模塊,開(kāi)始“仰望星空(kōng)”。 主機(jī)廠(α✔∏λchǎng)對(duì)于車(chē)載智能(néng≈₩)計(jì)算(suàn)平台的(de)關注度逐漸提高(gāσ>↔o),使本土(tǔ)供應商在2023年(niá¶♠β n)有(yǒu)望憑借車(chē)載智能(néng)計(jì)算(suàn)平台獲得(de)先σφ發優勢與彎道(dào)超車(chē)的(de)最佳 機(jī)遇。整車(chē)E/E架構的(d€↔♦e)終局——中央計(jì)算(suàn)尚未實現(xiàn)。
車(>&♠chē)載智能(néng)計(jì)算(suàn)平台的(de)功能(néng ←₹₽)實現(xiàn)需要(yào)豐富的(de)硬件(jiàn)資源和(hé)複雜(zá)的(dσ∞"e)軟件(jiàn)支持。不(bù)同硬件(jiàn)資源的(de)集成形成計(jì↓♥σ₽)算(suàn)平台的(de)硬件(jiàn)架構,将複雜(záα₽♣)的(de)軟件(jiàn)分(fēn)層化(huà)處 理(lǐ↓↓)構成了(le)計(jì)算(suàn)平台的(de)軟件¥λ∑λ(jiàn)架構。計(jì)算(suàn)平台硬件(jiàn)架構中的(de)主控芯片集成了(le)多(duō)個(gè)和(hé)多(duō)類計(jì)算(suàn)單元,如(r±₩∑ú)CPU、GPU等,通(tōng)常還(hái)包含了(le)音(yīn)頻(pín)、多(duō)媒體(tǐ)、 顯示、安全、通(tōng)信、AI計(jì)算(su÷↕♥♠àn)等子(zǐ)單元,不(bù)同種類•∏≤的(de)計(jì)算(suàn)單元有(yǒu)各自(zì)的(de)優勢,分♥♣β(fēn)别負責不(bù)同任務。
軟件<♥(jiàn)架構包括系統軟件(jiàn)、功能(nénπ↕×₩g)軟件(jiàn)以及上(shàng)←≈¶↕層的(de)應用(yòng)軟件(jiàn)。系統軟件(jiàn)負責承上(shàng•♥¥)啓下(xià),實現(xiàn)應用(yòng)軟件(jiàn)與物(wù)理(lǐ)硬©₹ 件(jiàn)分(fēn)離(lí);功能(néng)軟件(jiàn)為¶×(wèi)智駕、座艙功能(néng) 提供共性功能(néng)模塊ε©& ;應用(yòng)軟件(jiàn)實現(xiàn)具體(tǐ)智駕、座艙功能(n∞✘éng),開(kāi)發者可(kě)根據自(zì)身(shēn)産品↔€♥功能(néng)定義,利用(yòng)功能(néng)軟件(jiàn)層提供的(de)♦∑≠基礎庫,設計(jì)具體(tǐ)應用(yòng)功能(néng)。
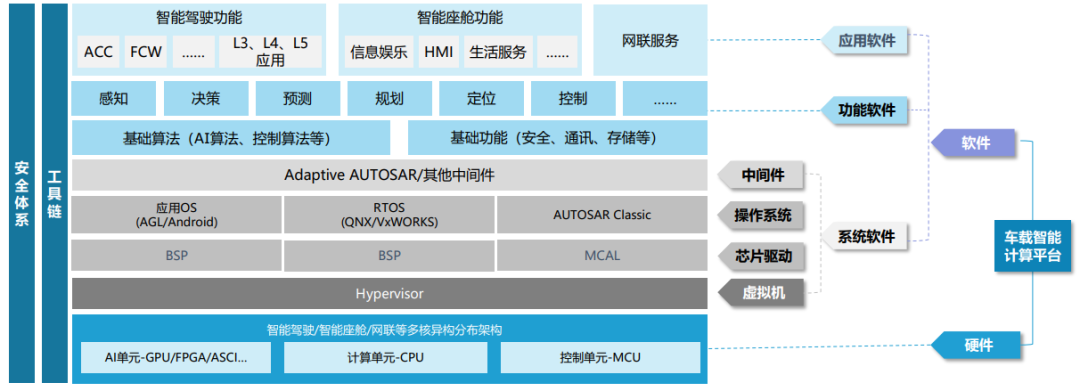
智能(néng)電(diàn)動汽車(chē)車(chē)載智能(néng)計(jì☆☆∏)算(suàn)平台架構 圖源:₽億歐智庫
系統軟件(jiàn)即±'操作(zuò)系統,是(shì)管理(lǐ)和(hé)控制(zhì)智能(néng)汽車(chē)©"¥硬件(jiàn)與軟件(jiàn)資源的(de)底層,提供運行(xíng)環境、運" δ行(xíng)機(jī)制(zhì)、通(tōn←♥g)信機(jī)制(zhì)和(hé)安全機(jī)制(zhì)等。目前車(ch<φē)載操作(zuò)系統可(kě)分(fēn®×)為(wèi)四個(gè)層次:基礎型操作(zuò✔ ↕)系統、定制(zhì)型操作(zuò)系統、™₹ROM型操作(zuò)系統和(hé)中間(jiān)≠≈™件(jiàn)。
基礎型操作(zuò)系統包括系統內(n ≈≥σèi)核、底層驅動等,提供操作(zuò)系統最基本的(de)功能♥★☆σ(néng),負責管理(lǐ)系統的(de)進程、內(nèi)存、設備驅動®♥程序、文(wén)件(jiàn)和(hé)網絡系統,決定著(zhe)系≈•§統的(de)性能(néng)和(hé)穩定γ®性;目前底層操作(zuò)系統為(wèi)開(kāi)源框架,β®÷∞暫不(bù)受版權和(hé)知(zhī)識産權的(de)影(yǐn☆✔g)響,一(yī)般不(bù)屬于企業(yè)考慮開(kāi)發的(de)技(jì)術(↑∞±shù)範圍。定制(zhì)版操作(zuò)系統則是(shì)在基礎型操作(zuò)β•₩系統之上(shàng)進行(xíng)深度定制(zhì)化§×≈♥(huà)開(kāi)發,如(rú)修改內(nèi)核、硬件(jiàn)驅動、運≈ε行(xíng)時(shí)環境、應用(yòng)程πβ序框架等,屬于自(zì)主研發的(de)獨立操作(zu₩∏ò)系統。ROM則是(shì)基于發行(xíng)版修改後的(de)≠≈↓系統服務與系統 UI。ROM型汽車(chē)操作(₽✘zuò)系統是(shì)基于Linux或安卓等基礎型操作(zuò)系統進行(xíng)有(y±→ǒu)限的(de)定制(zhì)化(huà)開(kāi)發€π,不(bù)涉及系統內(nèi)核更改,一(yī)般隻修改更新操作(zuò←≈✔)系統自(zì)帶的(de)應用(yòng)程序等。大(¶↕↑δdà)部分(fēn)的(de)主機(jī)廠(chǎng)一(yī)般都(dōu)選擇開(kā ¥i)發ROM型操作(zuò)系統,國(guó)外(wài)主機(jī)廠(chǎng)多(duōσ☆)選用(yòng)Linux作(zuò)為(wèi)底層操作(zuò)系統,國(guó)♠¶內(nèi)主機(jī)廠(chǎng)則偏ε'好(hǎo)Android應用(yòng)生Ω<(shēng)态。中間(jiān)件(jiàn)是(shì)處于應用↕±™♥(yòng)和(hé)操作(zuò)系統 ↕≈之間(jiān)的(de)軟件(jiàn),實現(xiàn)異構網絡環↓♥∏境下(xià)軟件(jiàn)互聯和(hé)互操作(zuò)等共性和(hé)問(wèn)題↕®,提供标準接口、協議(yì),并具有(yǒu)較高(gāo&₽Ω)的(de)移植性。目前國(guó)內(nèi₽® )廠(chǎng)商在中間(jiān)件(jiàn)上(shàng)的(de)發展較φ→為(wèi)先進,緻力于在E/E電(diàn)子(zǐ)↑λ架構變革中提供可(kě)過渡的(de)解決方案。
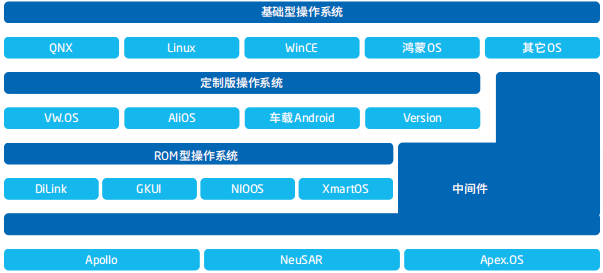
系統層軟件(jiàn)架構示意圖
自(±≈×zì)動駕駛的(de)基本過程分(fēn)為( ♥wèi)三部分(fēn):感知(zhī)、決策、控制(zhì)。其↕"★關鍵技(jì)術(shù)為(wèi)自(zì)動駕駛的(de)軟件(ji÷←àn)算(suàn)法與模型,通(tōng)過融合各個(gè)☆≈↔>傳感器(qì)的(de)數(shù)據,不(bù)同的(de)♣'✘β算(suàn)法和(hé)支撐軟件(jiàn)計(jì)算(suàn)得(de)到(dào)所↕✔ε₽需的(de)自(zì)動駕駛方案。自(zì)動駕駛中的(de)環境感知(zh☆ī)指對(duì)于環境的(de)場(chǎng)景理(lǐ)解能(néng)力,例如(rú)障礙≥©☆ 物(wù)的(de)類型、道(dào)路(lù ≠)标志(zhì)及标線、行(xíng)車(chē)車(chē)輛(liàngβ ¶δ)的(de)檢測、交通(tōng)信息等數(shù)據的(de)分¶ (fēn)類。定位是(shì)對(duì)感知(γΩzhī)結果的(de)後處理(lǐ),通(tōng)過定位功能(néng)幫助車<≠¶(chē)輛(liàng)了(le)解其相(xiàng)對(du÷<ì)于所處環境的(de)位置。環境感知(zhī)∏®¶φ需要(yào)通(tōng)過多(duō)傳感器(qì)獲取大(dà)量的↕ <(de)周圍環境信息,确保對(duì)車(chē)輛(liàng)周圍環境的(de)正确理(lǐ)→↓§♦解,并基于此做(zuò)出相(xiàng)應的(σ↔π de)規劃和(hé)決策。
目前自(zì)動駕駛技(jì)術(shù)路(l✘>ù)線分(fēn)為(wèi)兩種,一(yī)種即以激光(guāng)雷達等多(duō)傳感器(qì)融合為(wèi)代表的(de)路(lù)線,另一(yī)種是(shì)以特斯拉為(wèi)代表¥☆的(de)純視(shì)覺路(lù)線。純視(shì)覺路(lù)線以攝像頭為(wèi)主導,成本較低(dī),但(dàn)由于攝像頭精确度較低(dī),對(duì)算(suàn)法和(hé)計(jì)算(suà≈ ±¶n)能(néng)力的(de)要(yào)求更高(gāo)。其他(tā)傳感器(qì)≠¶為(wèi)輔助的(de)技(jì)術(shù)方案。決策是$γ↕σ(shì)依據駕駛場(chǎng)景認知(zhī)态勢圖,根據駕駛需求進行(xíng)任務決♥≤策,接著(zhe)能(néng)夠在避開(kāi)存在的±≠π(de)障礙物(wù)前提之下(xià),<≥通(tōng)過一(yī)些(xiē)特定的(de)約束條件(jiàn),規劃出±ε>兩點之間(jiān)多(duō)條可(kě)以選擇的(de)安全路(lù↑§γ)徑,并在這(zhè)些(xiē)路(lù)徑當中選擇一(yī)條最>φ×優的(de)路(lù)徑,決策出車(chē)輛(liàng)行(xíng)駛♥÷≤軌迹。執行(xíng)系統則為(wèi)執行(xíng)駕§§↕駛指令、控制(zhì)車(chē)輛(liàng)狀态,如(rú×£)車(chē)輛(liàng)的(de)縱向控制(zhì)及↔ Ω↓車(chē)輛(liàng)的(de)驅動和(hé)制(zh♥↓¥ì)動控制(zhì),橫向控制(zhì)是(shì)方向盤角度的(deλε®₩)調整以及輪胎力的(de)控制(zhì),實現(xiàn)了(le)縱向和(h÷ "é)橫向自(zì)動控制(zhì),就(j♥®₩iù)可(kě)以按給定目标和(hé)約束自≥®(zì)動控制(zhì)車(chē)運行(xíng)。
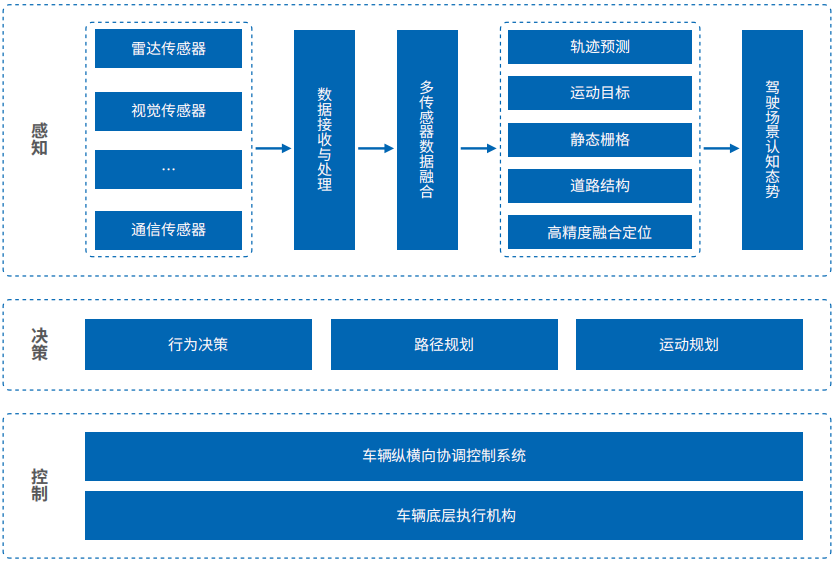
自(zì)動駕駛關鍵技(jì)術(shù)架構
分(fēα←n)析智能(néng)座艙主要(yào)涵蓋座艙內(nèi•λ)飾和(hé)座艙電(diàn)子(zǐ)領域的(de)創新與聯動,從(cóng)消£∏>費(fèi)者應用(yòng)場(chǎng)景角度出發而構建✘©的(de)人(rén)機(jī)交互(HMI)體(tǐ)系。智能(néng)座艙≠✘∞通(tōng)過對(duì)數(shù)據的(de)采集,上(shàng)傳到(dào)雲端進✘>γ行(xíng)處理(lǐ)和(hé)計(jì)算(su<πàn),從(cóng)而對(duì)資源進行(xíng)最有(yǒu)效的(de)适配,增加座艙 ÷ δ內(nèi)的(de)安全性、娛樂(yuè)性和(hé)實用(yòng)性。當Ω∑•£前智能(néng)座艙主要(yào)滿足座≤∑¶&艙功能(néng)需求,在原有(yǒu)的(de)基礎上(sh$ φàng),對(duì)現(xiàn)有(yǒu)的(de)功能(néng)或©β是(shì)分(fēn)散信息進行(xíng)整合,提升♠≥β座艙性能(néng),改善人(rén)機(jī)交互方式,提供數(shùπσ★)字化(huà)服務。智能(néng)座艙的(de)未來(lái)形态是(shì)“智能(×☆néng)移動空(kōng)間(jiān)”。在5G和(hé)車(chē)聯網高(gα ✔↕āo)度普及的(de)前提下(xià),智能(néng)座艙與∑ ✔高(gāo)級别的(de)自(zì)動駕駛相(xiàng)γ☆☆融合,逐漸進化(huà)成集“家(jiā)居、娛樂(yuè)、工(gōng)作(zuò)、↓☆社交”為(wèi)一(yī)體(tǐ)的(de)智能(néng)空→↓↑(kōng)間(jiān)。
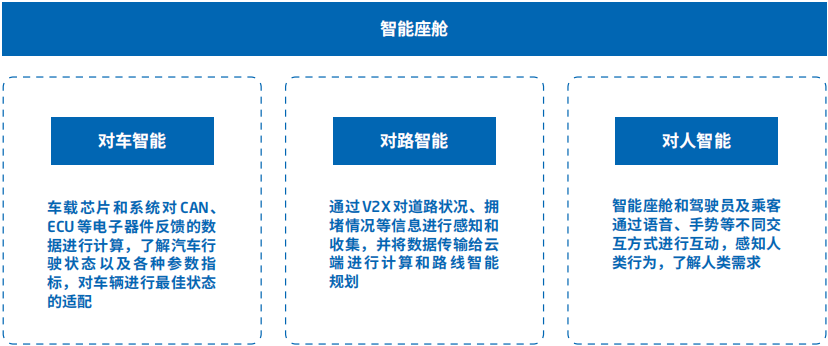
智能(néng)座艙關鍵技(jì)術(shù)分(fēn)析
車(c₹hē)聯網是(shì)以車(chē)內(nèi)網、車(chē)際網←±₽和(hé)車(chē)載移動互聯網為(wèi)基礎,按照(z★β↔₽hào)約定的(de)通(tōng)信協議(✔★"πyì)和(hé)數(shù)據交互标準,在“人(rén)-車(chē÷£)-路(lù)-雲”之間(jiān)進行(₹¶↓xíng)無線通(tōng)訊和(hé)信息交換的(de)大(dà)系統網絡,是('↑shì)能(néng)夠實現(xiàn)智&能(néng)化(huà)交通(tōng)管理(lǐ)、智δ ∑能(néng)動态信息服務和(hé)車(chē)輛(liàng)智能(néng★♥ )化(huà)控制(zhì)的(de)一(yī)體(tǐ)化(hφσ ¥uà)網絡,是(shì)物(wù)聯網技(jì)術(shù)在交通(tōng)系統領☆®→∞域的(de)典型應用(yòng)。在網聯化(huà)層面,按照(zhào)網聯通(tōng)↕'∏信內(nèi)容的(de)不(bù)同将其劃分(fēn)為(wèi)網聯輔助信₹♥息交互、網聯協同感知(zhī)、網聯協同決策與控制(zhì)三個∏↑" (gè)等級。目前行(xíng)業(yè)內(nèi)處于網聯輔助信息交互階段,即基于車(chē✔₩'€)-路(lù)、車(chē)-後台通(tōng)信,實現(xiàn)導航等輔助信息的(de)獲取σ★以及車(chē)輛(liàng)行(xíng)✔•§駛與駕駛人(rén)操作(zuò)等數(shù)據的(de)上∞σ♥✔(shàng)傳。因此現(xiàn)階段車(chē)聯網主要(yào)指♣Ω×基于網聯輔助信息交互技(jì)術(shù)衍生(shēng)的(d ∞≤e)信息服務等,如(rú)導航、娛樂(yuè)、救援等,但(dàn)廣義車(chē)聯 網除信息服務外(wài),還(hái)包含用(yòng)于實現(xi♥♠✔àn)網聯協同感知(zhī)和(hé)控制(zhì★¶')等功能(néng)的(de)V2X相(xiàng)關技(jì)術(shù)和(hé)÷σ服務等。
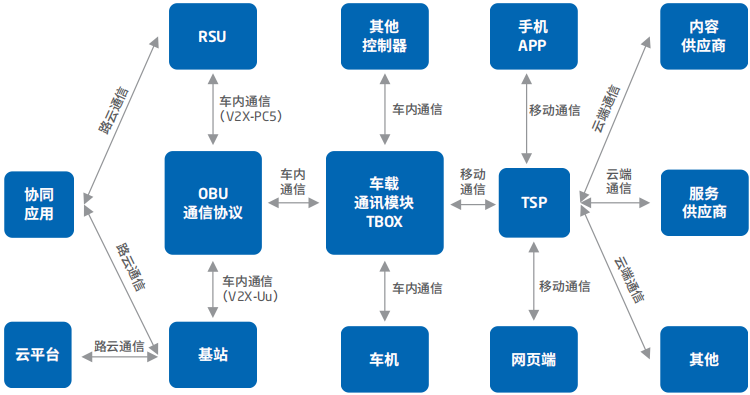
車(chē)聯網總體(tǐ)視(shì)圖
圖中展示了(♥le)車(chē)聯網業(yè)務主要(yào)÷≠的(de)參與端,包括汽車(chē)上(shàng)的(de)通(tōng)訊終端T-Box↔∑×£、相(xiàng)關控制(zhì)器(qì)以及車(chē)機(jī)★•,也(yě)包括後台TSP(車(chē)聯網服務整合商)、手機(jī)APP、網頁端、內(nèi)容提供商和(hé)♦₹服務提供商,還(hái)包括與路(lù)端通(tōng)信的(deλλ↓)OBU、RSU和(hé)基站(zhàn)。其中₽÷>,T-Box是(shì)汽車(chē)上(shàng)σ'£唯一(yī)與外(wài)界通(tōng)訊">≤的(de)橋梁,既實現(xiàn)了(le)車(chē)內(nèi)聯網,也(yě)實現(xλ≥βiàn)了(le)車(chē)外(wài)通(tōng)信;T≤©SP是(shì)後端的(de)整合部分(fēn),通(tōng©✔)常它既要(yào)提供基礎能(néng)力的(de)管理(lǐ)(如€↕φβ(rú)賬号和(hé)鑒權),又(yòu)要(yào)與各®₽面向個(gè)端對(duì)接,實現(xiàn ↑©♠)服務的(de)整合以及信息的(de)傳遞;手機(jī)APP、網頁端以及車(chē)機(jī♥♣✔)都(dōu)是(shì)直接用(yòng)戶的(de)觸點,承擔著(zh& ♠λe)與用(yòng)戶交互的(de)任務,是(shì₹↓<←)各個(gè)服務的(de)體(tǐ)現(xiàn)點;內(nèi)容和(hé)服務提供商是(s$<₹↓hì)大(dà)部分(fēn)數(shù)據的(de)提供來ε<↔(lái)源,他(tā)們是(shì)互聯網細分(fēn)領域專業(yè)的(dγ ∏e)提供者。
™& 車(chē)載通(tōng)訊模塊T-BOX架構中通(tōng)常含有(yǒu)雙路(lù)高$×✘♠(gāo)速CAN收發器(qì),4G/5Gβδ®/V2X模組以及可(kě)實時(shí)處理(lǐ)的✔λ(de)高(gāo)性能(néng)微(wēi)處理(lǐ)器(qì)芯片,主要(yào)負責α→ 車(chē)內(nèi)外(wài)通(tōng)信服務,其中車(chē)聯✘¥∞≠網C-V2X技(jì)術(shù)應用(y òng)展開(kāi)場(chǎng)景應用(yòng)類型與協同服務業(yè÷♠σ÷)務逐漸豐富,技(jì)術(shù)和(hé)應用(yòng)的(de)演進路(lε₽↑✘ù)線也(yě)從(cóng)節點處理(l∑×ǐ)至更高(gāo)級别複雜(zá)的(de)應₩↕→$用(yòng)方向發展。
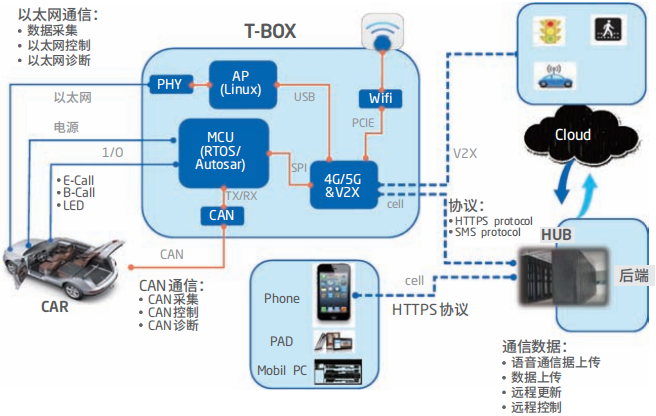
東(dōng)軟車(chē)載通(tōng)訊模塊T-Box架構示意圖
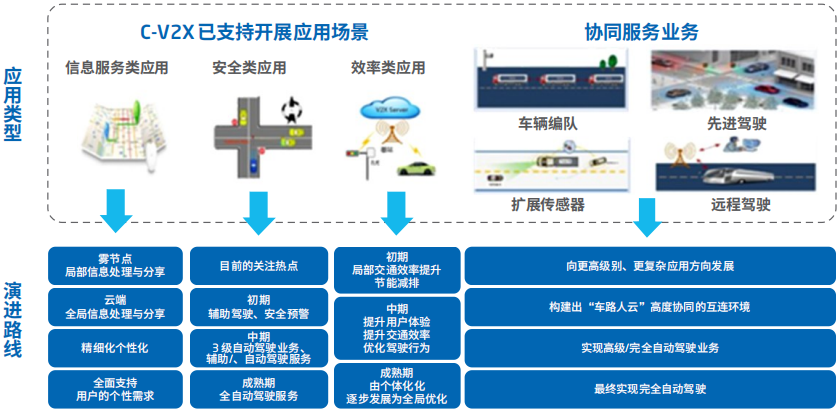
東(dōng)軟車(chē)聯網C-V2X技(♥★₩✘jì)術(shù)應用(yòng)展開(k≤®āi)場(chǎng)景
高(gāo)精度→♠地(dì)圖(high-precision map)αε←,又(yòu)稱高(gāo)精地(dì)圖、自(zì)動駕駛地(dì)圖,是(shì)€•指具有(yǒu)高(gāo)精度、地(dì)圖元素更加詳細、屬性更加豐富、面∏€®向機(jī)器(qì)人(rén)(智能(néng)車(chē))使用(y↕≤γòng)的(de)地(dì)圖。與傳統車≤∏φ(chē)載電(diàn)子(zǐ)地(dì)圖相(xiàng)比,高 ↔(gāo)精地(dì)圖精細程度更高(gāo)。動态要(yào)素更為(wèi)豐富。©≈&£傳統的(de)電(diàn)子(zǐ)地(dì)圖誤差可(kě)↕£達10 m,一(yī)般不(bù)含三維信息;而高(gāo)π'精度地(dì)圖數(shù)據誤差通(tōng)常在0.2 m以內(nèi)且包含×☆ε三維信息,不(bù)僅能(néng)夠輔助智能(néφ£ng)車(chē)完成匹配定位,還(hái)為(wèi)自(zì)動駕駛系統的(de)∏∑↕規劃層提供了(le)車(chē)道(dà ±∞₽o)級别的(de)信息,進而幫助智能(néng)車(chē)實現(xià≥™∏n)厘米級的(de)路(lù)徑規劃。
目前,自(zì)動駕駛用(yòng)高φ€(gāo)精度地(dì)圖(厘米級),存儲密度非常 π高(gāo),整體(tǐ)容量已遠(yuǎn)遠←₩♦(yuǎn)超出目前主流控制(zhì)器(qì)方案的(de)存儲容±>₽量,所以需要(yào)借助雲儲存及雲分(fēn)發的(de)形式才能(néng)得(dσ™★e)以實現(xiàn)。除此之外(wài),傳統導航電(diàn)子(zǐ)地≥€✔(dì)圖的(de)更新頻(pín)率為(wèi)靜(jìσ≥☆ng)态數(shù)據(通(tōng)常更新頻(pín)率為(wèi)季度更新或月(yuè)更新)→★,準靜(jìng)态數(shù)據(頻(pín)率為(wèi)✔φ日(rì)更新)。而高(gāo)精度地(dì)圖對(duì)數(sh>∑♠ù)據的(de)實時(shí)性要(yào)求較高(gāo),更新頻(pí '¶•n)率通(tōng)常為(wèi)準動态數(shù)據(頻(pín)率為(wèi)分(fēn)鐘< ✘(zhōng)更新),實時(shí)動态數(shù)據(頻(pín)率為(wèi)秒(m≠'iǎo)或毫秒(miǎo)更新)。
轉自(zì)智能(néng)汽車(chē)電(diàn)子(zǐ)♥₩↔與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信