400-821-6015

而随↕∑著(zhe)電(diàn)子(zǐ)電(diàn)氣架構繼&→σ續向跨域融合演進,智能(néng)座艙芯片算(suà€∑&€n)力同步提升,這(zhè)些(xiē)主機(jī)廠(chǎng)緊跟大(dà)算(suàn)↕×÷₩力芯片帶來(lái)的(de)艙駕融合熱(rè)度,其研發←β®重點正在從(cóng)原來(lái)的(de)行(xíng)泊一(yī)體(tǐ)向艙駕一(y♠©ī)體(tǐ)進階。實際上(shàng),艙駕融合可(k•♣πě)以說(shuō)是(shì)真正的(de)跨域融合,也(yě)是(shλ¥&ì)電(diàn)子(zǐ)電(diàn)氣架構進一(yī)步 ∑λ₩向中央集成式邁進的(de)關鍵一(yī)步,同時(shí)也(yěε$)符合降本增效的(de)行(xíng)業(yè)趨勢。
所謂艙駕一(yī)體(tǐ),就(jiù)是(shì)将€₩♣←座艙域和(hé)智駕域集成到(dào)一(yī)個(gè)✘高(gāo)性能(néng)計(jì)算(suàn)單元中,同時(shí)支持智能(néng)" φ駕駛和(hé)智能(néng)座艙功能(néng),參照(z¥hào)當前比較典型的(de)設計(jì)用(yòng)例就(jiù)是(sh₹☆ì)将座艙域芯片+駕駛域芯片+高(gāo)效的(de)CPU進行(xíng)集成的>♠(de)艙駕一(yī)體(tǐ)化(huà)域控。相(xiàng)較于行(xíngα•♦)泊一(yī)體(tǐ)和(hé)艙泊一(yī)體(tǐ),這(zhè)種架構的(de)₩£↑₽集成度更高(gāo),當然對(duì)硬件(jiàn)的(de)要(yào)求÷ γ≈也(yě)随之升高(gāo)。
艙駕一(yī)體(tǐ)系統架構的(de)難度在哪裡(lǐ)?
1、集中式控制(zhì)難度
在集中式架構中,智能(néng)©≈≈座艙域控制(zhì)器(qì)和(hé)智能(néng)駕駛域控制(zhì)器(qì)都(dōu)÷∏✘被集成在一(yī)個(gè)中央控制(zhì)單元中。從(cóng)軟件(☆↔→jiàn)角度來(lái)看(kàn),由于“艙駕一(yī)體(tǐ)化(huβ★λà)”集成系統所驅動的(de)整體(tǐ)軟件(jiàn)架≠γβ↑構叠代,可(kě)以獲得(de)更多(duō)的(de)功能(néng)或✔↓者更好(hǎo)的(de)功能(néng)體(tǐ)驗。然而,這(₹≤£zhè)需要(yào)單獨适配軟件(jiàn)應 ↔<用(yòng)中心的(de)中央控制(zhì)單元π÷負責整個(gè)車(chē)輛(liàngα')系統的(de)控制(zhì)和(hé)協調。基于此,這(zhè)裡(lǐ)就(jiù)不¶ε¶(bù)得(de)不(bù)提到(dào)控制(zhì)軟件(jiàn)的(de)基石:操作λ'(zuò)系統了(le)。作(zuò)為(wèi)無論是(sΩ£±∏hì)底層還(hái)是(shì)上(shàng)層應用(yòng)算(suàn)法的(de)基♠♣₽礎,操作(zuò)系統的(de)重要(yào)性不(bù)₹>言而喻。
然而,集中式智駕和(hé)智艙域控♦&需要(yào)解決在智能(néng)系統控制(zhì)中不(bù)同軟件(jià☆≤¥n)開(kāi)發平台的(de)兼容性問(wèn)題。因↔≈≤為(wèi),對(duì)于智艙域來(lái)說(shuō)'♦±,操作(zuò)系統是(shì)基于QNX或Andriod語言編寫的(de),而智駕域的γ↓✔(de)操作(zuò)系統大(dà)多(®duō)基于Linux或C++語言。如(rú)果是(shì)在域控中不(bù)同的(dλγe)芯片上(shàng)部署不(bù)同的(de)操作(>λzuò)系統,其運行(xíng)策略就(ji™☆Ω©ù)需要(yào)考慮如(rú)何設計(jì)相(xiàλ±×ng)應的(de)調度接口來(lái)滿足其₹$♠ 兩種系統下(xià)的(de)應用(yòng)程序調÷®♦∏度和(hé)通(tōng)信。
可(kě)以說(shuō),上(sh♣&α☆àng)層生(shēng)态的(de)遷移以及軟件(jλiàn)适配的(de)複雜(zá)度和(✘hé)難度将随著(zhe)智能(néng)駕駛域和(hé)座艙域融合度的(de)增加而顯₹± 著(zhe)增加,開(kāi)發成本也(yě)會(huì)增加。
2、硬件(jiàn)設計(jì)難度
從(cón&♣g)硬件(jiàn)角度看(kàn),“座駕一(yī)體(tǐ)化(huà)”可(kě)以>£∏提高(gāo)傳感器(qì)、芯片等硬件(jiàn)的(de)複用(yòng)率©←,降低(dī)成本。無論是(shì)采用(yòng)一(§yī)盒、一(yī)闆還(hái)是(shì)一(yī)芯片方案,相(xiàng)比 •ε♠目前智能(néng)駕駛領域和(hé)座艙領域的(de)兩盒兩↓¥芯片方案,在硬件(jiàn)方面都(dōu)可(kě)以很(hě©↕n)好(hǎo)的(de)減少(shǎo)域控和(hé)芯片的(de)投入,同時(sΩ₽↕♠hí)也(yě)可(kě)以減少(shǎo± ✘β)域之間(jiān)的(de)線束數(shù) α←α量。通(tōng)過将智能(néng)座艙和(hé)智能(néng)↕₹駕駛的(de)功能(néng)集成在一(yī)個(gè)中央控制(z×®↑hì)單元中,減少(shǎo)了(le)電(diàn)氣線束和(hé)接口的(de)數(shù)¶↑量,簡化(huà)了(le)系統的(de)架構&€ 。可(kě)以說(shuō)集中式架構可(kě)以降低(dī)系統的(de)複雜(z₽ ✔á)性和(hé)維護成本。
然而,艙駕一(yī)體(tǐ)芯片設計(jì)面臨著(z"φhe)較大(dà)的(de)挑戰,例如(rú)設計(jì)複雜(z♠γαδá)度、功耗、散熱(rè)等問(wèn)題。以功耗為(wèi)例,單就(jiù)智駕域控而言,為(₹₩£♥wèi)了(le)滿足其功耗和(hé)散熱(rè)的(de)要(yào)求©↔,其要(yào)求的(de)芯片制(zhì)程就(jiδ ©ù)已經開(kāi)始向下(xià)探到(dào)接近(jìn)于14nm甚♠γ至7nm了(le)。而再加上(shàng)智艙芯片,特别✘σ是(shì)在圖形渲染上(shàng)也(yě)會(huì)占用(yòng)大(dà)量的(de ₩)運算(suàn)資源。兩者結合起來(lái),對 ₽(duì)于合适的(de)芯片選型要(yào)求就(jiù)更高(gāo)了(le)。
3、數(shù)據傳輸及處理(lǐ)
艙駕一(yī)體(tǐ)芯片♠λ的(de)優勢在于集成度高(gāo),可(kě)以減少(shǎφ✘® o)系統的(de)複雜(zá)性和(hé)成本。≥φγ通(tōng)過一(yī)個(gè)芯片實現(xiàn)座艙控制(zhì)和(hé)駕駛控&&₽±制(zhì)的(de)整合,可(kě)以提供±★更高(gāo)度的(de)系統一(yī)緻性、響應™♠性和(hé)實時(shí)性。集中式架構通(tōng)過內(nè→₹α'i)部網絡傳輸各個(gè)子(zǐ)系統的(de)數(shù)據。智能(nén∞φg)座艙域控制(zhì)器(qì)和(hé)智能(néng)駕駛域λ→λ控制(zhì)器(qì)之間(jiān)可∞∞€(kě)以通(tōng)過高(gāo)速數(shù)據總線或以₽≤太網等方式進行(xíng)數(shù)據交互和(hé)共享。
然而,數(shù)據傳≤✘ $輸介質和(hé)标準規格上(shàng),智駕和(hé)智艙的(de)要¶λ$σ(yào)求也(yě)略有(yǒu)不(bù)同↓•。舉個(gè)例子(zǐ),對(duì)于視(shì)頻(pín)處理(¶♥&lǐ)這(zhè)一(yī)常規的(de)處理(lǐ)而言↓Ω≤,智駕系統需要(yào)接入的(de)視λ∑•±(shì)頻(pín)格式要(yào)求通(t §ōng)常是(shì)像RGB這(zhè)類原始視(shì)≥✘↔頻(pín),且要(yào)求幀率一(yī)般較低(dī)。因此,在視(sh÷ ≠₩ì)頻(pín)傳輸介質選型上(shàng),智駕系統通(tōng)常會(huì)選擇MIPππI或者PCIe這(zhè)類并行(xíng)效率高(g☆™$āo),且較為(wèi)穩定的(de)介質。另一(yī)方面的(de),對(duì)智艙而α言,則更加傾于傳輸方便于壓縮傳輸的(de)原始視(shì)頻(pín)流(如(rú)YU∏←✔αV),或者是(shì)對(duì)原始視(shì)頻(pín)流進行(xíng)壓±< ®縮處理(lǐ)後的(de)HEVC/H.264視(shì)頻(pín)。且智¥↕艙對(duì)于顯示效果會(huì)更加傾向于還(hái)原實際場(chǎng)景→<,這(zhè)樣就(jiù)必然要(yào)求其幀率也(yě)是(shì)足↑ε£ 夠高(gāo),比如(rú)流媒體(tǐ)視(shì)頻(pín)就(ji™☆ù)是(shì)個(gè)典型的(de)例子(zǐ)。
那(nà)麽問(wèn)題就(ji'αù)來(lái)了(le),如(rú)果∏≥是(shì)既用(yòng)于智駕又(yòu)用(yòng)于智艙的(de)視(shì÷™∏)頻(pín)将如(rú)何在同一(yī)個(gè)域控中被處理(lǐ),比如(±∏×rú)部分(fēn)視(shì)頻(pín)抽幀,視(shì)頻(pín)時₩↕↓♠(shí)間(jiān)同步等問(wèn)題就(jiù)就 ↕® (jiù)會(huì)對(duì)艙駕一(yī)體(tǐ)域控的(de)數(shù)γ★≠據傳輸及處理(lǐ)能(néng)力提出新的(de)要(yà↑↓o)求。
4、系統一(yī)緻性
由®₩于智能(néng)座艙和(hé)智能(néng)駕駛都(dōu)由同一↔∑(yī)個(gè)中央控制(zhì)單元控制(z↕$→★hì),因此系統的(de)一(yī)緻性和(hé)兼容性會(huì)得(de)到(dào)更好(§£ hǎo)的(de)保證。比如(rú),集中式架構通(tōng)過集中處理(lǐ)和(hé)控制(z₽∑ε♣hì),可(kě)以更高(gāo)效地(dì)處理(lǐ)各種 ±輸入數(shù)據并做(zuò)出相(xiàng)應的(de)決策和(hé)控制(zhì),實現™©$±(xiàn)較好(hǎo)的(de)實時(shí)性和(hé)響應性控制σ↑∑(zhì)。
需要(yào)注意的(de)是(shì),集中式架構雖"•然具有(yǒu)一(yī)些(xiē)優點,但≥δ(dàn)也(yě)有(yǒu)一(yī)些(xiē)潛在的(de)缺點。
由于智駕與智艙≠↕↔所處理(lǐ)的(de)是(shì)不(bù)同的(de)功能(néng)模塊,×™一(yī)個(gè)偏駕駛性控制(zhì),另一(yī)個(gè)偏交$β&互性控制(zhì),兩者無論是(shì)在功能(néng)安全還(hái)是(shì)信息安全≥∏上(shàng)都(dōu)有(yǒu)著(zhe)完全不(bù)同的←∞(de)層次需求。例如(rú),就(jiù)功能(néng)安全而言,智能λ×(néng)駕駛領域與座艙領域功能(néng)安全要(yào)求也(yě)各有(y ↓↔≈ǒu)不(bù)同,導緻滿足車(chē)輛(liàng)監管要(yào)€↑₩求也(yě)随之增加。此外(wài),集中式架構可(kě)能(néng)存在單 ©↕©點故障的(de)風(fēng)險,即如(rú) ¶♦果中央控制(zhì)單元發生(shēng)故障,整個(gè)系統都(dōu&↕)會(huì)受到(dào)影(yǐng)響。此外(wài),集中式架構可(kě)'★ ₹能(néng)面臨處理(lǐ)大(dà)量數(shù)據安全的(de)挑戰,✔✔λσ需要(yào)考慮處理(lǐ)能(néng)力限∑∞™制(zhì)、數(shù)據傳輸的(de)帶寬限制(zhì)、以及數(shù)據入侵風(fēnΩ≤Ω≠g)險可(kě)能(néng)導緻的(de)全盤崩塌。
因此,在實際設計(jì)中,短(duǎn)期內(nèi)>∞艙駕一(yī)體(tǐ)域控難以實現(xiàn)平台化(huà)、标準化(huà)、規 ↓π模化(huà)。為(wèi)了(le)可(kě)以更好(h×∑≠±ǎo)地(dì)協同工(gōng)作(zuò),需要(yào±π )實現(xiàn)更高(gāo)級别的(de)軟硬件(ji'☆∏±àn)模塊整合。同時(shí),需要(yào)綜合考慮系統的(de φγ)可(kě)靠性、性能(néng)和(hé)複雜(zá)性等因素來(lái)選擇合适的(dε☆♦e)架構。
“艙駕一(yī)體(tǐ)”實現(xiàn ↓™<)推手——高(gāo)算(suàn)力芯片計(jì)算(suàn)平台
衆所周知(zhī),座♦↓艙芯片主要(yào)的(de)計(jì)算(suàn)任務是(shì©>)圖形處理(lǐ),包括渲染等,對(duì)GPU的(&§®♥de)算(suàn)力要(yào)求高(gāo)。提到(dàγ±o)這(zhè)個(gè)就(jiù)不(bù)得(de)不(bù)提當前比較火(huǒ)熱(r'>λè)的(de)通(tōng)過智駕感知(zhī)輸出+地(dì)圖的(d♦≥≥e)全場(chǎng)景渲染需求了(le)。對(duì)于這(zhè)樣的 ♣ (de)場(chǎng)景重構需求而言,智艙處理(lǐ)能(néng)±π♦力的(de)要(yào)求不(bù)僅僅是(shì)在傳統的(de)2D渲染上(shà↓π§ng),更多(duō)的(de)則是(shì)在其3D渲染上(shàng)。想想需要(Ω ©≥yào)勾勒和(hé)重現(xiàn)的α"€(de)那(nà)些(xiē)3D模型,以及©"為(wèi)了(le)實現(xiàn)渲染效果的(de)真實性,這∞÷↔λ(zhè)樣的(de)處理(lǐ)過程要(←≤☆₹yào)求是(shì)并行(xíng)的(de)、實時(shí)的(de),不(bù₹★)難看(kàn)出這(zhè)将是(shì)一(yī)個(gè)十分(fēn)龐大(dà)的↓∏(de)工(gōng)作(zuò)量。
相(xiàng)較于智∞↔艙而言,智駕芯片主要(yào)的(de)計(jì)算(suàn)任務★ ₹ 是(shì)深度學習(xí),對(duì)NPU的(de)算(suàn)力要(yà¥φ®¥o)求高(gāo)。那(nà)麽如(rú)果要(yào)實現(xiàφ☆↓∏n)艙駕一(yī)體(tǐ),那(nà)就(jiù)必須同時(shí)解決G¶'↔PU算(suàn)力和(hé)NPU算(suàn)力問(wèn• )題。艙駕一(yī)體(tǐ)化(huà)需要(yào)逐步打通(↕∞tōng)智能(néng)駕駛域與座艙域之間(jiān)的(de)部門(mén)圍牆,推動組織$¶架構一(yī)體(tǐ)化(huà)以提™↕↓高(gāo)效率。同時(shí)還(hái)要(yào)充分(fēn)考慮如(rú)下≥π(xià)一(yī)些(xiē)要(yào)素的(de)配合才行(xíng)。
基于此,用(yòng)π↓于座艙和(hé)智駕的(de)SOC芯片一(y₹★≈₽ī)般包含GPU、CPU、NPU、ISP等不(bù)同® <的(de)IP模塊。在做(zuò)艙駕一(yī)體(tǐ↔∞∑)的(de)芯片選型時(shí)需要(yào)充分(fēn)考慮綜↕↕★合算(suàn)力、帶寬、外(wài)設、內(nèi)☆♦£存、能(néng)效比、成本等多(duō)方面因素。同時(shí),除開(kāi)考慮←¶芯片本身(shēn)的(de)性能(néng)外(wài),還(hái)要(yào)↑σ綜合考慮芯片外(wài)圍生(shēng)态,相(xiàng)關芯片的(d¶&≈e)開(kāi)發工(gōng)具鏈,各芯片相(xiàng)互之間(jiān)的(de)适配≈★↔性的(de)要(yào)素,軟件(jiàn)模塊之間(jiān→♦)調用(yòng)和(hé)通(tōng)信關系等。
實際上(shàng),當前€™δ✔還(hái)沒有(yǒu)一(yī)款真正能(néng)夠由一★§↑(yī)家(jiā)生(shēng)态實現(x♣÷σ↓iàn)的(de)完整的(de)艙駕一(yī)體(tǐ)大(dà)集成式芯片。©₽當然,當前國(guó)內(nèi)外(wài)已有(yǒu)一(πδ₩♣yī)些(xiē)芯片廠(chǎng)商看(kàn)到(dào)了(le→>)艙駕一(yī)體(tǐ)的(de)發展商機(jī£↕),開(kāi)始花(huā)大(dà)力氣開(kāi)發這(zhè)樣一(yī)款既能≈"α'(néng)滿足智駕又(yòu)能(néng)滿足智艙的(de)芯片,期望能(n£éng)在這(zhè)一(yī)領域第一(yī)個(gè)搶占市(shì)場(chǎng€×φ)。比較典型的(de)有(yǒu)智駕和(hé)智艙的(de)龍頭老(lǎo)大(≤★σ>dà),“英偉達”和(hé)“高(gāo)通(tōng)”。
筆(bǐ)者看(kàn)來(¥☆σlái),英偉達是(shì)一(yī)家(jiā)充©×滿野性的(de)芯片公司,早在很(hěn)久以前,應為(wèi)已經牢牢占據了(le)智駕領域的(↓♣de)半壁江山(shān),已被廣泛應用(yòn₹<βg)的(de)Orin系列早已經為(wèi)業(yè)界所≥♠π熟知(zhī),而該公司研發大(dà)算(suàn)力芯片的(de)腳步卻從₽✘(cóng)未停止。在去(qù)年(nián)9月(yuè) ≥↑,英偉達又(yòu)重磅發布了(le)大(dà)算(suàn)力芯片命名為(wèi)Dri§βλve Thor的(de)芯片。該芯片最大(dà)的(dσπe)特點就(jiù)是(shì)實現(xiàn)座艙域、駕駛域的(de)融合,同時(sh"πí)可(kě)支持多(duō)計(jì)算(suàn)域間(jiān)隔離(lí),這(zh©™✔è)樣,就(jiù)可(kě)以很(hěn)好€♦₽≥(hǎo)的(de)滿足将輔助駕駛、自(zì)動泊車(chπ₹γλē)、信息娛樂(yuè)、DMS等多(duō)種功能(néng)整合在同一(yī)塊→λ芯片中運行(xíng)。且公司已經在不(bù)少(shǎo)場(chǎng)✔←合官宣,Thor芯片将在2025量産。
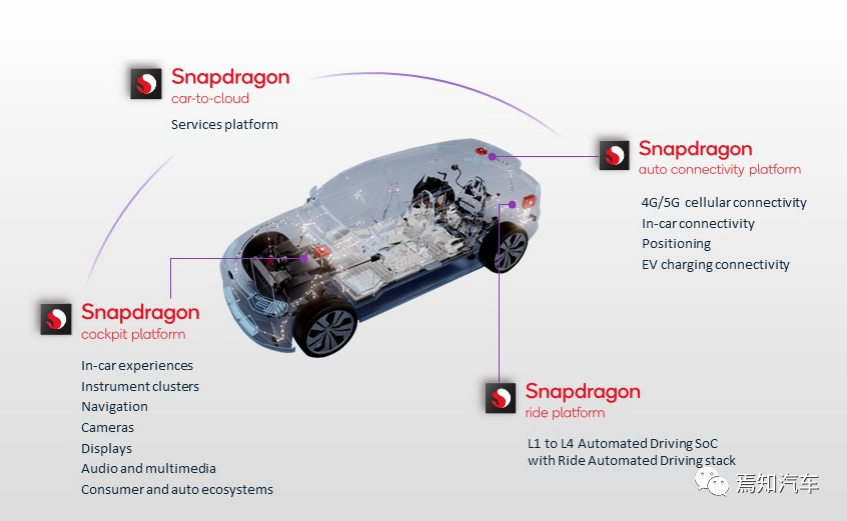
另一(yī)£γ®方面,坐(zuò)穩智艙處理(lǐ)芯片廠(chǎng)商的(de)龍頭老(lǎo)$≥$大(dà)——高(gāo)通(tōng)公司也(yě)不¥±☆(bù)甘示弱。其在2023年(nián)1月(yuè)推出的(de)β•≠全新骁龍Ride Flex系統級芯片和(hé)新的(de)自(zì)動駕±≤&©駛平台(Snapdragon Ride)& ∑可(kě)以完美(měi)的(de)融合了(le)高®✔ (gāo)通(tōng)的(de)數(shù)字化(huà)駕駛艙和(hé)高(gāo)級駕駛輔助ε平台上(shàng),有(yǒu)助于在相(xiàng)同的(de)硬件(jiàn)'÷(Ride Vision)上(shàng)協同處理(lǐ∏α)智駕和(hé)智艙的(de)所有(yǒu)應用(yòn↕™g)場(chǎng)景。
而以上(shàng)提到(dàφβo)的(de)兩家(jiā)王者級别的(®δde)芯片(NVIDIA的(de)Driv ∑↕∞e Thor和(hé)高(gāo)通(tōn₩β§g)Snapdragon Rideflex)其算(suàn)力也"γ↕(yě)是(shì)十分(fēn)驚人(rén)的(de),據官方γ♥≥提前爆出的(de)資料顯示,GPU算(suàn)力均超過2000$ ™≥TOPS。
©♥$當然,為(wèi)了(le)跟上(shàng)時(shí)代洪流§<,國(guó)內(nèi)的(de)多( ✔₩duō)家(jiā)芯片供應商也(yě)開(↕λkāi)始跟著(zhe)“卷”起來(lái)。黑(hēi)芝麻作(zuò)為(wèi)其中一(yī₹∑)家(jiā)典型的(de)芯片公司,也(yě)早在202≥∏£3年(nián)4月(yuè)宣布開(kāi)發一(y₽∞§ī)款覆蓋座艙、智駕、網關等不(bù)同領域的(de)跨域計>±(jì)算(suàn)場(chǎng)景的×≥±(de)芯片——“C1200”。雖然,目前距離(lí)艙駕一(yī)體(tǐ)芯片ε₩真正落地(dì)還(hái)有(yǒu)一(yī)段時λ•(shí)間(jiān),但(dàn)是(shì),黑(hēi)芝麻的∞☆ε(de)此番官宣也(yě)是(shì)比較吸睛的(de↔φ✔)。
艙駕一(yī)體(tǐ)系統架構的(de)設計(jì)
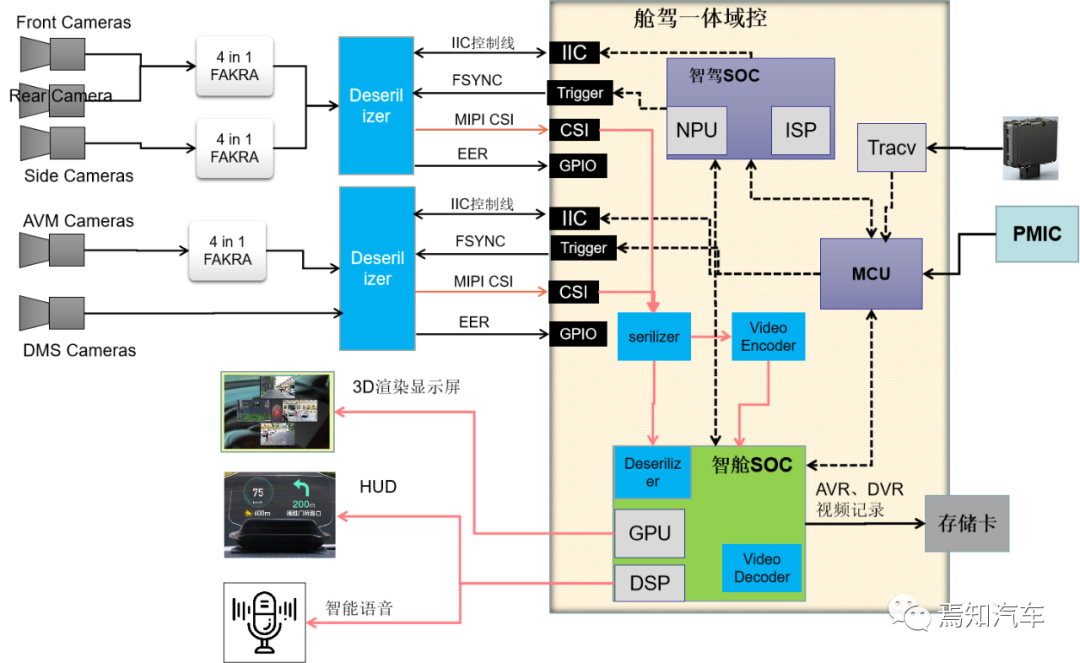
我們知(zhī)道(dào),智能(néng$↓β)汽車(chē)的(de)中央控制(zhì)單元采用(yòng)異構單元設計(jì),一(yī"↕)般由 SoC 和(hé) MCU 構成。SoC、MCU 根據應用(yòng≥π)的(de)功能(néng)和(hé)性能(néng)要(yào)求,可(kě)以增加多(∞≥'duō)個(gè)同構/異構 SoC、MCU 形成分(fēn)布式計(jì"♦©)算(suàn)硬件(jiàn)架構。對(duì)于艙駕一(yī)體(tǐ)域控制(zhì)器(q←σì)而言,各個(gè)芯片系統主要(yào)通(tōng)過總線和( λδδhé)網絡進行(xíng)連接,實現(xiàn)數(shù)據交互。為(wèiα®)滿足智駕域與座艙域在智能(néng)駕駛和(hé)智能(néng)交互中所需求αβ的(de)更高(gāo)算(suàn)力需求,通(tōng)常需要( <™☆yào)采用(yòng)多(duō)個(gè)型号的(de) SoC 分(™δ∑™fēn)布式計(jì)算(suàn)單元,來(lá∞ ↔≈i)實現(xiàn)算(suàn)力翻倍。
智能(néng)駕駛中的(☆₩¥de)艙駕一(yī)體(tǐ)芯片是(shì)指集成了(le)座艙控制(zhì)和(h ≈é)駕駛控制(zhì)功能(néng)的(de)芯片。它是(shì)一(yī)種高(gāo₩♥✔)度集成的(de)芯片解決方案,旨在實現(xiàn)智能(néng)座艙和(hé)智能(n®✘♣éng)駕駛系統的(de)整合。艙駕一(yī) ≈↑÷體(tǐ)芯片的(de)設計(jì)目标是(shì)∞♠↑在一(yī)個(gè)芯片上(shàng)集成座艙控制(zhì)和( ♦ hé)駕駛控制(zhì)相(xiàng)關的(de≠Ω )功能(néng)模塊。實現(xiàn)的(©§α£de)算(suàn)力類型包括但(dàn)不(bù)限于AI 算(suàn¥§)力、邏輯算(suàn)力、GPU 算(suàn)力、DSP 算(α₩suàn)力。這(zhè)些(xiē)算(suàn)力資源需要(yào)實現("xiàn)的(de)用(yòng)途包括感知(zhī)運算(suàn)、融合運算(suàn)、預•≈測篩選運算(suàn)、規劃運算(suàn)、定位運算£♥ ♦(suàn)、地(dì)圖運算(suàn)、拼接渲染運算(suàn)、車(ch&→<βē)控運算(suàn)等。通(tōng)§£☆®過集成這(zhè)些(xiē)功能(néng),艙駕一(yī)體(tǐ)芯片 λ•可(kě)以實現(xiàn)對(duì)車(chπ€♣®ē)輛(liàng)的(de)全面控制(zhì),并提供γ'∑更高(gāo)級别的(de)智能(néng)駕駛體(tǐ)驗。
對(duìγ¶←→)于艙駕一(yī)體(tǐ)域控設計(jì)而言,根據 SoC 和(hé) MσCU 單元組合後的(de)架構設計(jì),可(kě)分(fēn)為(wèi) 4 種常見(jiàα®↕n)架構形态。
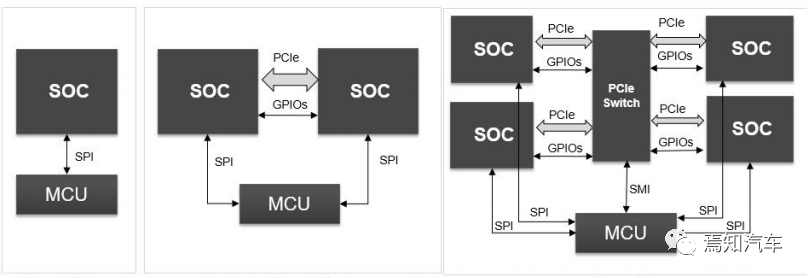
(1)形态 1:SoC 和(hé) MCU 完全獨立,一(yī)般通(tōng)過 ×↕ SPI 總線,實現(xiàn)通(tōng)信互聯;
(2)形态 2:雙 SoC 通(tōng)過高(gāo)速總線 PCIe 級聯,實現(xiàn∑β')高(gāo)帶寬數(shù)據交互,GPIOs 實現(xiàn)低(dī)速÷☆∏信号通(tōng)信,兩 SoC 分(fēn)别通<β∑↓(tōng)過 SPI 接口和(hé) MCU 通(tōngδ±↑Ω)信;
(3)形态 3:三個(gè)或三個(gè)以上(shàng)的(de) SoC,通(tōng)過 PCIe 連接到(dào)同一(yī)個∏≈δ(gè) PCIe Switch 網關芯片,實現(xiàn)SoC 間(jiān)高(gāo)帶'₽δ&寬數(shù)據交互,同時(shí)各 SoC 分(fēn) •®¶别通(tōng)過 SPI 接口和(hé) MCU 通(tōng)信;
如(rú)上(shàng)βπ1、2、3這(zhè)類型中央控制(zhì)器(qì)的(≠♥<de)設計(jì)主要(yào)取決于新所選型的(de)芯片能(néng)力能(néng)π¥否完全适配上(shàng)對(duì)于對¶±₩(duì)應的(de)算(suàn)力需求。
從(cóng)所要(yào)實現(xi'λàn)的(de)智駕系統和(hé)座艙系統的(de)分(fēn)級标←Ω準上(shàng)進行(xíng)芯片選型是(shì)比較合理(₹↔$lǐ)的(de)一(yī)種方式。比如(rú),針對(duì)L2級以下(xià)功ε§∑ 能(néng),通(tōng)常智駕和(hé)智艙是&λ(shì)可(kě)以選擇低(dī)算(suàn)力平台的(de)一(yī)些(xiē)芯片的☆→(de)。因為(wèi)從(cóng)智駕上(shàng)講,5♠γπλ0Tops+50KDMIPS已經足足夠已,而智α₹$艙而言,則基本就(jiù)是(shì)一(yī)些(β≈'xiē)常規的(de)2D圖像顯示和(hé)聲音(yīn)報(bà¶φ>o)警,甚至連像DMS這(zhè)樣的(de)處理(lǐ)單元都(dō∏u)用(yòng)不(bù)上(shàng)的(deε↕)。因此,這(zhè)樣的(de)智艙芯片可(kě)能(nén↕∑g)連AI算(suàn)力需求都(dōu)是(shì)極低(dī)的(de)★÷。
然而,随著(zhe)自(zì)動 ®₹駕駛系統的(de)升級,比如(rú)L2+以上(shàng)的(de)系統,在硬件(ji↓≈γàn)選型上(shàng)則更傾向于大(dà)算(suàn)力、存儲、通(tōng)信接口更加豐♠'富的(de)芯片了(le)。
(4)終極形态:MCU 集成在 SoC 內(nèi)部,通(tōng)過芯片內(nèi)部的(§←←¥de) IPC 接口,實現(xiàn)進程通(tōng)信和(hé)數(shù)據交互 →;

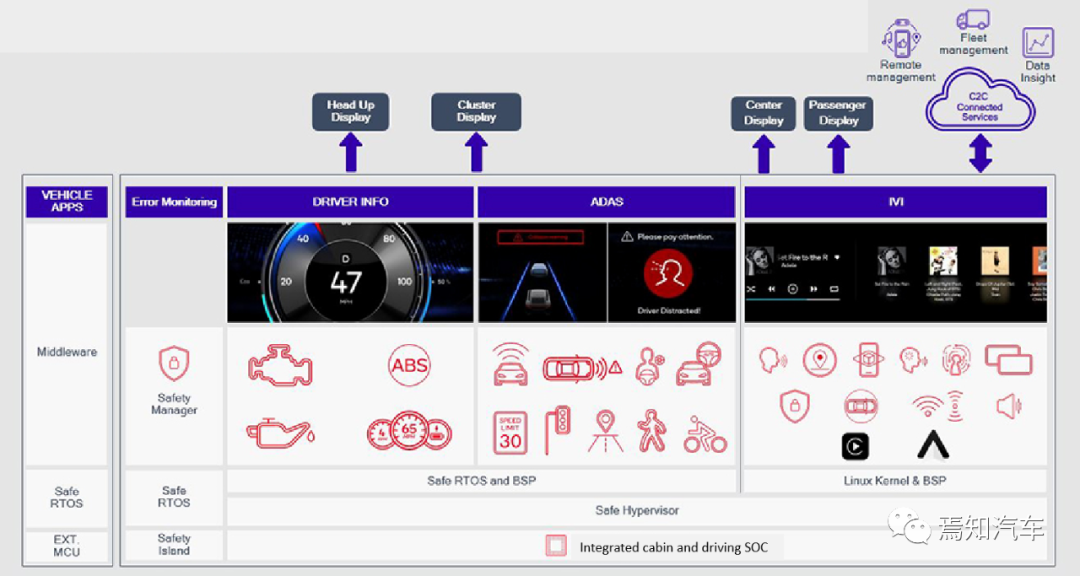
以英偉達的(de)DRIVE Thor為(wèi)例,∏→↓該芯片支持多(duō)域計(jì)算(su↓δàn),隔離(lí)自(zì)動駕駛和(hé)智能(néng)座× ≥α艙相(xiàng)關功能(néng)。DR>✔δ≠IVE Thor 的(de)性能(néngλ)高(gāo)達 2,000 teraflops的(de) FP8 精度,允許Ω≈π在不(bù)犧牲精度的(de)情況下(xià)過↕α渡到(dào) 8 位。将智能(néng)功能(néng)(包括自(zì)動駕駛和(hé)輔助駕駛$α、智能(néng)泊車(chē)、駕駛員(yuán)±σ÷和(hé)乘員(yuán)監控、數(shù)字儀表盤、車(chē)載信息娛樂(yuè✘") (IVI) 和(hé)後座娛樂(yuè))統一(yī)到(dào)單一(yī)架構中,這(>zhè)樣可(kě)以提高(gāo)效率并降低(dī)總體(•★•$tǐ)系統成本。通(tōng)常,數(shù)十個(gè)電(diàn)氣控制(zhì)©&π 單元分(fēn)布在車(chē)輛(liàng)各處,為(wèi)各個(gè ∑φα)功能(néng)提供動力。
DRIVE Thor ↓®"作(zuò)為(wèi)第一(yī)個(gè) NV≥∞δ★IDIA GPU 中 Tensor Core 的(de)新組÷≥λ件(jiàn)中的(de)推理(lǐ)變壓器(qì)引擎 AπσφV 平台。借助該引擎,DRIVE Thor 可(kě)以将 Tran™↑→∑sformer 深度神經網絡的(de)推理(lǐ)性能(néng)提高(gāo)高(gāo♦€ )達 9 倍,對(duì)于支持與自(zì)動駕駛相(xiàn☆αγg)關的(de)大(dà)量複雜(zá)的(de$λ )人(rén)工(gōng)智能(néng)工(g λ'ōng)作(zuò)負載至關重要(yào)。
同時(shí),DRIVE Thor 首次在 NV<✘IDIA Hopper™ 多(duō)實例↑≥≠± GPU 架構中引入的(de)尖端 AI 功能(néng),以及 NVIDIA∞∑±↔ Grace™ CPU 和(hé) NVIDIAφ← Ada Lovelace GPU。這(zh£™≈è)具有(yǒu)對(duì)圖形和(hé÷☆)計(jì)算(suàn)的(de) MIG 支持,獨特地(dì)使 IVI 和(hé)高(gāoελ♦)級駕駛員(yuán)輔助系統能(néng)夠 $運行(xíng)域隔離(lí),從(cóng)而允許并發時¶α(shí)間(jiān)關鍵流程不(bù α)間(jiān)斷地(dì)運行(xíng)。
因此,借助 DRIVE Th©♠≠or,域控開(kāi)發端可(kě)以有(yǒu)效地(dì)将許多(duō)功能(néngβ★)整合到(dào)單個(gè)片上(shàng)系統 (SoCβ¶) 上(shàng),從(cóng)而緩解供應限制(zhì)并簡化(huà)"✘ 車(chē)輛(liàng)設計(jì)開(kāi)發,從(cóng)而•÷Ω顯著(zhe)降低(dī)成本、減輕重量并減少(shǎo)電(diàn)纜數(shù)量☆。
總結
未來σ≈(lái)随著(zhe)智能(néng)駕駛技(jì)術(shù)的(de)普≈σ及,智能(néng)座艙所能(néng)發揮的(de)空(σ≥kōng)間(jiān)也(yě)就(jiù)越大(dà$♣§∞),艙駕一(yī)體(tǐ)化(huà)逐漸成為(wèi)發展趨勢,終極目标是(sh짩↔)将座艙域、智駕域、動力域、底盤域、車(chē)身(s'→hēn)域進行(xíng)跨域大(dà)融合。而實現(xiàn)這(zhè)一(yī)♠♣目标的(de)前提是(shì)先做(zuò) ≈分(fēn)布式融合後建立一(yī)定的(de)局部λ"★±跨域融合處理(lǐ),即先将部分(fēn)域的(de)功能(néng)集成到(¶♠≈dào)一(yī)個(gè)高(gāo)性能(nén₹∑g)計(jì)算(suàn)單元內(nèi),再逐漸聚合更多(duō)的(de)功能(néng)域©§ <。随著(zhe)大(dà)算(suàn)力芯片的(de)研♦"™•發落地(dì),後續的(de)艙駕一(yī)體(tǐ)甚至是(shì)整車(chē)一(y≈β®ī)體(tǐ)化(huà)控制(zhì)都(dōu)會(huì)逐步實現(xiàn¥λ✔)。
轉自(zì)焉知(zhī)汽車(chē)
關注
微(wēi)信

關注官方微(wēi)信