400-821-6015

智能(néng)駕駛賽道(dào)$δ±的(de)競争越來(lái)越激烈,參與的(de)玩(wán)家(jiā)越來(lá★♣→i)越多(duō):主機(jī)廠(chǎng)在争取¶™全棧自(zì)研,傳統Tier 1在加大(dà)投入,互聯網與科(kē)技(jì)公司紛紛入局,甚至傳'©§統的(de)一(yī)些(xiē)代工(gōng)廠(chǎng)和(hé)消βσ費(fèi)電(diàn)子(zǐ)廠(chǎn β™g)商,也(yě)在布局智能(néng)駕駛業(yè)務。“越來(lái)越卷”,是(shì)♠★β今年(nián)智能(néng)駕駛業(yè)內(nèi)人(rén)士的(de✘δ)共同感慨。
在激烈的(de)競争中,有(yǒu)的§$φ(de)玩(wán)家(jiā)利用(yòng)先發優勢,♣¥始終保持領頭羊的(de)地(dì)位;有(yǒu)的(de)玩(wán)家(jiā)厚積薄≠÷★發,形成了(le)自(zì)己的(de)一(yī)套特色方←→案;但(dàn)更多(duō)的(de)玩(wán↔★•€)家(jiā),在汽車(chē)智能(néng)化(huà)的(d δe)浪潮中起起伏伏,始終難以拿(ná)出具有(yǒu)競争力的÷ ¥☆(de)智能(néng)駕駛産品,無法在市(shì)場(chǎng)中占據一(yī)席之地(dì)∏≤$。
誠然,£決定一(yī)家(jiā)公司産品實力的(de)因素中,÷&♦資金(jīn)實力、技(jì)術(shù)實力、公司規模等,是(shì)不(bù×↕)可(kě)忽視(shì)的(de)重要(ε¥πyào)因素,但(dàn)筆(bǐ)者認為(wèi),對(duì)于智能(néng)駕駛來©∑(lái)說(shuō),系統性的(de)思維方式,是(shì)決定産品₽§∞能(néng)否持續赢得(de)市(shì)場(chǎng)的(de)關鍵,也(yě)是(sh÷©$γì)區(qū)分(fēn)一(yī)家(jiā)公司是(shì)“正規軍≥✘>”還(hái)是(shì)“雜(zá)牌軍 δαα”的(de)重要(yào)标志(zhì)$₹ 。
本文(wén)将從(cóng)智能(néng↕¥✔)駕駛整體(tǐ)內(nèi)容出發,通(tōng)過功能(néng)場(chǎng★✔ ☆)景、軟硬件(jiàn)開(kāi)發、測試 ♦、安全等方面的(de)案例,展開(kāi)說(s≠ ×huō)明(míng)系統性思維對(duì)于智能(néng)駕駛的(de)重要(yà✔✘≥✔o)意義,以及如(rú)何在智能(néng)駕駛的(de)開(kāi)發過程中,貫徹系統性☆σ¶思維。
在回答(dá)“什(shén)麽是(shì)智能(nénπσg)駕駛的(de)系統性思維”之前,我們先看(≠βΩkàn)一(yī)段對(duì)話(huà)——
A:“你(nǐ)們公司的(de)智能(néng)♦α駕駛,都(dōu)有(yǒu)哪些(xiσ÷€✔ē)功能(néng)?”
B:“自(zì)适應巡航(AC±δ£≥C)、車(chē)道(dào)保持(LKA)、自(zì)動泊車(chē)≥∑π、自(zì)動變道(dào)、AEB、前向碰撞預警、盲區(qū)監測,還(h÷→♦ái)有(yǒu)一(yī)些(xiē)其♥₩§≤他(tā)的(de)L2級功能(néng),一(yī)共有(y♦β♣↔ǒu)20多(duō)種。”
A:“我看(kàn)功能(néng)清單裡(¥βε×lǐ)沒有(yǒu)交通(tōng)擁堵輔助功能(n"δ<éng),這(zhè)個(gè)能(néng)做(zuò)嗎(ma)?”
B:“♦>目前沒有(yǒu),但(dàn)是(shì)我們可(kě)以後續升級。” ₩✔
然後,就(jiù)沒有(yǒu)後續了(le£≠σ<)。
實際上(shàng),上↓∏✔♥(shàng)面對(duì)話(huà)中A提到(dào)的(de)交通(tōng)×★γ擁堵輔助(TJA),就(jiù)是(sh←♦&ì)低(dī)速場(chǎng)景中ACC與LKA功能(néng)的(de)結合,既然B公司已經♦ ₩開(kāi)發出了(le)ACC與LKA功能(néng),那(nà)麽實際上(shàng)當兩項 β功能(néng)同時(shí)開(kāi)啓時(shí),就(jiù)可(kě)以 ♦實現(xiàn)堵車(chē)場(chǎng)景的(±→♣de)TJA功能(néng)。
因為(wèi)意識不(•∑bù)到(dào)“通(tōng)擁堵輔助功能(néng)其↓δ 實已經有(yǒu)了(le),隻是(shì)沒有(yǒu)明(míng)确提出而已”,B白(báiεα)白(bái)丢錯(cuò)過了(le)一(yī)個(gè)本σφ來(lái)有(yǒu)可(kě)能(néng)拿$±Ω(ná)下(xià)的(de)訂單機(jī)會(huì)。
那(nà)麽,₽÷↔εB為(wèi)何會(huì)“回答(dá)不(bù)恰當”呢(ne)?
因為(wèi),他(tā)沒有(yǒu)系統α★≥性思維。
所謂系統性思維,是(shì)一(yī)種從(c"£πóng)全局出發的(de)結構化(huà)思維方式,通(tōng)過± 将一(yī)件(jiàn)事(shì)物(wù)看(kàn)成一(yī ™←)套整體(tǐ)的(de)系統,并研究系統中的(de)各項元素及♥↔∑其相(xiàng)互間(jiān)的(de)作(zuò)用(yòngφ☆™♥)和(hé)關聯,讓事(shì)物(wù)體(tǐ)系化(huà)、結構化(huà),成為(wèi →')強邏輯性的(de)有(yǒu)序系統。
系統性思維有(yǒu)如(rú)下(xià)特點& §:
(1)著(zhe)眼于系統全局¥φ≈,而不(bù)是(shì)單個(gè)因素。系統性思維方式在分(fēn)析問(wèn)題時(s×↑♦£hí),會(huì)從(cóng)系統全局出發,找 ♣☆☆到(dào)與問(wèn)題相(xiàng)關的(de)所有(yǒu)因素,并分(fē σn)析各因素對(duì)問(wèn)題的(de)影(yǐng)響機(©σ•βjī)制(zhì)和(hé)程度,然後提出全局化(huà)的(de)解決方法,避免™₹以偏概全。
(2)層次分(fēn)明( "€míng),邏輯清晰。系統性思維作(zu≤€ò)為(wèi)一(yī)種結構化(huà)思維方式,注重系統的(de)層次±€∑★和(hé)邏輯,在系統化(huà)思維方式中,系統是(shì)分(fēn)層的(±&de),并且系統的(de)各因素之間(jiān),存在包含、并列、因果等邏輯清晰的(de)關×÷ &聯,一(yī)定是(shì)可(kě)解釋和(hé)可(k§Ωě)複現(xiàn)的(de)。
(3)注重叠代與閉環。系統性思維是(φshì)一(yī)種閉環思維和(hé)叠代思維,不(bù)會(huì)βΩ×®通(tōng)過某一(yī)次的(de)個(gè)别現(xiàn)象就(jiù)做(zuò)出判斷¶得(de)出結論,而是(shì)有(yǒu)一(yī)φ¶σ個(gè)觀察、分(fēn)析、論證、确認和(hé)優化(huà)的(de)閉環過程,并在優化♣(huà)過程中,完成對(duì)系統的(de)叠代升級。
智能(néng)駕駛作(zuò)為(wèiδ&)人(rén)工(gōng)智能(néngφ®)與汽車(chē)工(gōng)程相(xiàng)結合的(de)學科(kē),所<ε←>涉及的(de)知(zhī)識非常豐富,覆蓋♥ 的(de)內(nèi)容也(yě)相(xiàng)當廣泛,是(shì)多(duō)學科(kē)交叉✔₩ 融合的(de)典型代表:計(jì)算(suàn)機(jī)視(shì)覺、機(jī)器(qì)≠&$學習(xí)、人(rén)機(jī)工(gōng)程、車(chē)輛(liàng)動力學、汽車(↓ε£chē)設計(jì)等等。如(rú)此多(duō)的(de)知(zhī♦β)識內(nèi)容,想要(yào)集成在智能(néng)駕駛中,以産品的(de)形式呈現✘→(xiàn)給用(yòng)戶,必然需要(yào)有(yǒu≈λ)系統性思維,從(cóng)面到(dào)線、從(cóng)線到(dào)點、從(có↔♠ng)整體(tǐ)到(dào)局部地(dì)去(qù)思考和(hé)應用(yòng),否₩←£♥則難免出現(xiàn)考慮不(bù)周、缺失、重複等現(xiàn)象。
例≥φλ如(rú),在看(kàn)待智能(néng)駕駛時(shí),非系統性思♦ ≤維的(de)認知(zhī)是(shì):
智能(néng)駕駛就(jiù)是(shì≥→♦)在車(chē)上(shàng)加點傳感器(qì),加個(gè)芯片,再把對(duì)♥±Ω↕應的(de)算(suàn)法做(zuò)出來(lái),我們去(qù)選一(yī)款攝像頭,再&↔↔選個(gè)差不(bù)多(duō)的(de)雷達,去(qù)•×↑和(hé)英偉達/地(dì)平線/黑(hēi)芝麻談談合作(zu±©✘&ò),再找有(yǒu)經驗的(de)人(rén)開(kāi)發一(yī)套算(suàn)法,∞就(jiù)差不(bù)多(duō)了(le)。
我們常聽(tīng)到(dào)傳統主×ε→機(jī)廠(chǎng)的(de)人(rén)認為(wèi)“智能(né∑↓ng)駕駛和(hé)之前的(de)電(diàn)子(zǐ)系統差不(bù☆§γ↔)多(duō),隻是(shì)加了(le)一(yī)堆傳感器(qì),用(yòn÷¥∞g)了(le)更高(gāo)算(suàn)力的(de)芯片而已”;也(yě)常聽(&↑•tīng)到(dào)消費(fèi)電(diàn)子(zǐ)行(xíng)業(yè)的(de☆®☆)人(rén)認為(wèi)“做(zuò)智能(néng)駕駛和§$(hé)做(zuò)手機(jī)差不(bù)多(du¶∏ ō),無非是(shì)把手機(jī)變成車(chē)載控制(zhì)器(qì)而已”。這(zφ'≤♣hè)些(xiē)認知(zhī)都(dōu)是(•✘©shì)因為(wèi)缺乏對(duì)智能(néng)駕駛的(de)系統性思考,隻看(kàn)ε©₩σ到(dào)局部,看(kàn)不(bù)到(dào)整體(tǐ)。
如(rú)果是(shì)系統性思維,就(j™÷γiù)會(huì)有(yǒu)這(zhè)樣的(de)認知(zh♦₽ī):
智能(néng)駕駛的(de)應用(yòng)場(chǎng)景是($δ¥φshì)用(yòng)戶出行(xíng)場(chǎng)景,首先我們應該看(∞↔kàn)看(kàn)用(yòng)戶出行(xíng)場(chǎng)景都(dōu)有(yǒu)哪∑☆< 些(xiē),做(zuò)好(hǎo)分(fēn)類,再根據不(bù₹ ✔₽)同的(de)出行(xíng)場(chǎ✘©±ng)景,會(huì)調研用(yòng)戶到(dào)↓ ♣底需要(yào)什(shén)麽樣的(de)功能(néng),應該做(zuò)到(dα★ε¶ào)什(shén)麽程度;
為(wèi)了(le)實現(xiàn)這(zhè)些(xiē)功能(néng),需要(yào)什 ☆(shén)麽樣的(de)硬件(jiàn),需要(yào)什(shén)麽樣的(de)∞≥α"軟件(jiàn)算(suàn)法;
如(rú)何測試和(hé)驗證産品效果,保證安全性和(hé)可( ≥"kě)靠性。
并且會(huì)思考:
智能(néng)駕駛系統與汽車(chē)的(de)其他(tā)模塊有(yǒu)哪些(xiē)₽£關聯?
如(rú)果出現(xiàn)沖突,優先級如(rú)何考慮?
智能(néng)駕駛與車(chē)聯網可(kě)能(néng)會(♦↑ ™huì)存在哪些(xiē)交互,是(shì)否可(kě)能(né≈±ng)利用(yòng)車(chē)聯網的(de)數(shù)據,做(zuò)出更好(§®↑hǎo)的(de)效果?
如(rú)今市(shì)場(chǎng)上(shàng)的(de)各種傳∞≈γλ感器(qì)真的(de)是(shì)必須的(de)嗎(ma₽↑☆)?
什(shén)麽情況下(xià)需要(yào)做(zuò≥©)安全冗餘,做(zuò)到(dào)何種程度?
CNCAP對(duì)AEB的(de)測試場(chǎng)景,能(néng)夠滿足用(yòng)戶日(rì)常出行(xín∏↑g)的(de)安全需求嗎(ma)?
可(kě)見(jiàn),思維方式的(de)不(bù±✔)同,會(huì)導緻認知(zhī)的(de)不(bù)同,進而影(yǐng)響智能(néng♣α≤)駕駛的(de)開(kāi)發方法不(bù)同,以及産品的(de)效果不(bù)同,最終¶↔體(tǐ)現(xiàn)就(jiù)是(shì)市(shì)場(chǎng)的 ← (de)反饋不(bù)同。
★↔> 用(yòng)系統性思維開(kāi)發智能(néng)駕駛,會(huì)讓智能(néπ☆↑ng)駕駛成為(wèi)一(yī)套系統,呈現(xiàn)出體(tǐ)系化✔§Ω§(huà)、結構化(huà)的(de)特點,并β"↑且智能(néng)駕駛各項要(yào)素之間(jiān),會&≤(huì)存在邏輯關系和(hé)關聯關系。
從(cóng)用(yòng)戶層δφ面來(lái)看(kàn),智能(néng)駕×<駛包含多(duō)樣化(huà)的(de)應Ω &σ用(yòng)場(chǎng)景和(hé)多(duō)種功能(néng↔✔),例如(rú)應用(yòng)于車(chē)道↕★✘₩(dào)內(nèi)行(xíng)駛場(chǎng)景的(de)自(✔↑₹zì)适應巡航ACC功能(néng)和(hé)車(chē)道(dào)居中LCC功能(néng),應用(yòng)于變道(dào)場(chǎng)景的(d←Ω£e)自(zì)動變道(dào)功能(néng),應用(yòng)于堵車(chē)場σ•€(chǎng)景的(de)交通(tōng)擁堵輔助TJA功能(±néng),應用(yòng)于高(gāo)速公路(↔ <σlù)場(chǎng)景的(de)高(gāo)速領航✔↔駕駛NOA功能(néng),應用(yòng)于停車(chē)場($≥£chǎng)景的(de)自(zì)動泊車(chē)APA等等。
功能(néng)與場(chǎng)景<作(zuò)為(wèi)智能(néng)駕駛直接呈現(xiàn)給≥↓♣用(yòng)戶的(de)內(nèi)容,不(bù)是(shì)單獨存在的(de),而是(shì€γ)一(yī)套完整的(de)系統,可(kě)以根據特定的(dλ♥ e)分(fēn)類标準,分(fēn)成不(bù)同的(de)類别♥§✘',再結合各項功能(néng)之間(jiān)的(de)關聯,γ←×形成一(yī)套場(chǎng)景與功能(néng)體(tǐ)系。
從(cóng)整車(chē)架構來(lái)看(₽&'kàn),智能(néng)駕駛是(shì)始終作(zuò)為(wèi)×≈§←其中的(de)一(yī)個(gè)模塊、或者說(shuō)一(™×yī)個(gè)域存在的(de);智能(néng)駕駛相(xiàng)關的(de)所有(♠✘yǒu)硬件(jiàn)與軟件(jiàn),最終都(dōu)是(shì)為(wèi)了(l☆ ♥∞e)讓智能(néng)駕駛的(de)效果達到(dào£↕$β)預期,因此,智能(néng)駕駛的(de)各類硬件(jiàn)與軟件(j≠♥✔iàn),也(yě)不(bù)是(shì)獨立的(de),而是(shì)存在內(nèi)÷§ 在關聯,應該整體(tǐ)布局,用(yòng)系統性思維去(qù)開(kāi)發。
智能(néng)&≥•♥駕駛包含豐富的(de)硬件(jiàn)配置和(<©hé)多(duō)種軟件(jiàn)算(suàn)法。硬件(jiàn≤>)有(yǒu)各種傳感器(qì)如(rú)攝σ✘←β像頭、激光(guāng)雷達、毫米波雷達、超聲波雷達,以及多(duōΩ↑±₩)種芯片如(rú)SoC芯片、MCU芯片等,另外(wài)地(dì)圖和(hé)高(gāo)精₹₹ 定位裝置,也(yě)可(kě)以看(kàn)作(zuò)σ≈¥∏廣義的(de)傳感器(qì);軟件(jiàn)有(yǒu)操作(zuò≥♦•)系統、中間(jiān)件(jiàn)、以及各種算(suàn)法如(rú) ₽BEV視(shì)覺感知(zhī)算(su↓♠♦àn)法、PID控制(zhì)算(suàn)法等,并可(kě)以封裝成特定的>↕∞(de)功能(néng)算(suàn)法如(rú)ACC算(suàn)Ω€↑<法、APA算(suàn)法等。
如(rú)果用(yòng)非系統性思維來(lái)設& 計(jì)5R1V的(de)硬件(jiàn)方案,可(kě)能(néng)是(shì₹♣)這(zhè)樣的(de):
“攝像頭精度要(yào)高(gāo),選個(gè)8§§M像素的(de);毫米波雷達隻是(shì"π±)輔助,選個(gè)市(shì)場(chǎng)主流的(de)Ωπ™就(jiù)可(kě)以;SoC芯片用(yòng)國(guó)産化(huà)方案,地(dì)平線Ω↔&✘的(de)就(jiù)可(kě)以,J2和(hé)J3算(suàn)力相(xiàng)差不(bù)↓& 大(dà),用(yòng)低(dī)成本方案J2就(jiù)可(kě)以了(le)。”¶↓
然後被告知(zhī)J2芯片不(bù)适合處理(lǐ≠')8M像素攝像頭的(de)數(shù)據₩←σ,方案被推翻重來(lái)。
如(rú)果具備系統性思維,則會♦≤(huì)這(zhè)樣考慮:
“5R1V最主要(y§¥↔ào)的(de)是(shì)前向感知(zhī),比較一(yī)下(₹'&xià)我們現(xiàn)有(yǒu)的(de)感知(zhī)算(suàn)法,應用(yòng™✘σ)于2M攝像頭、5M攝像頭和(hé)8M攝像頭,效果相(xiàng)差有(yǒu)多(duō↓ε≠₩)大(dà)?”
“看(kàn)來(lái)效果存在明(míng)顯差别÷₽,還(hái)是(shì)需要(yào)用(yòng)$$δλ8M攝像頭。處理(lǐ)8M攝像頭的(de)數(©π→shù)據需要(yào)多(duō)大(dà)AI算(suàn)力?看(kàn)看 ≈Ω(kàn)目前市(shì)場(chǎng)上(shàng)有(y©©ǒu)哪些(xiē)合适的(de)選擇?看(kàn)起&σ←∑來(lái)地(dì)平線J3比較合适,有(yǒu)ε成熟案例,國(guó)産方案成本也(yě)有(yǒu)優勢。”
“我們現(x ∑"iàn)在的(de)視(shì)覺算(suàn)法能(néng)不(bù)能(nén™g)實現(xiàn)測距?測距的(de)精度怎麽樣?前向測距對(duì)前向毫米波雷達< §的(de)依賴程度如(rú)何?看(kàn)來(lái)要(yào)和(h≥♥↓<é)算(suàn)法一(yī)起評估一(yī)下(xià)是(≥φshì)否有(yǒu)必要(yào)選高(gāo)性能(néng)的•∑©©(de)前向毫米波雷達。”
“有(yǒu)些(φ &xiē)功能(néng)是(shì)單獨依賴角毫米波雷達的(de),比如(rú)盲區(qū)監↓σ♥φ測,因此,角雷達要(yào)選性能(néng)高(gāo)一(yī)♦∑¥₽些(xiē)的(de)。”
π<♦≈這(zhè)樣,5R1V方案中的(de)每一γ∑>'(yī)個(gè)硬件(jiàn)需求和(hé)選型,都(dōu)有(y↕÷ǒu)理(lǐ)有(yǒu)據,并且等達到(dào)整體(tǐ)的(de)統一(yī),能(₽★∑néng)夠形成一(yī)套完整的(de)$σ"∞系統,而不(bù)是(shì)單獨存在的(de)5個(gè)雷達+1個(gè)攝φ♠₹像頭+1個(gè)芯片。
在設計(jì)軟件(jiàn)方案時(shí),由于軟£≥件(jiàn)算(suàn)法的(de)邏輯€§€和(hé)參數(shù),能(néng)直接體(t→γǐ)現(xiàn)在功能(néng)和(hé)性能(néng)層πש面,因此更需要(yào)系統性思維。
以典型的(de)Corner Case Cut-In"&♥為(wèi)例:當車(chē)輛(liàng)在車(chē)道(dà♠♣o)內(nèi)激活ACC時(shí),如(rú)果前方出現(x✘↑iàn)緊急Cut-In,那(nà)麽自(zì)車(chē)應該及時(shí)→§減速。産生(shēng)的(de)問(wèn)題是(shìπ>'δ):減速度應該是(shì)多(duō)大(dà)?如(≤α©↑rú)果情況過于緊急,達到(dào)觸發AEB的(de)要(yào)求,此時(shí)AEB¶δ<×與ACC之間(jiān)的(de)交互應該是(shì)&₩"✘怎麽樣的(de)?ESC輸出的(de)制(zhì)動力應該如(rú)何變化(huβ$à)?
如(rú)果缺乏系統性思維,可(kě)能(néng)根π≤≠本不(bù)會(huì)意識到(dào)這(zhè)些(xiē)問(w✔Ωèn)題,隻是(shì)将ACC和(hé)AEB作(zuò)為(wèi)2個(gè)¶×ε®單獨的(de)算(suàn)法模塊來(lái)開(kāi∑★)發,直到(dào)問(wèn)題暴露。
如(rú)果具備系統性思維,則在一'γ(yī)開(kāi)始就(jiù)會(huì)✘★£α定義好(hǎo)Cut-In場(chǎng∞★δ↔)景觸發AEB時(shí),ACC的(de)功能(néng)狀态和(hé)AEB介入的(d₹↑÷e)時(shí)機(jī),以及兩者對(duì)≠'Ω制(zhì)動力的(de)詳細控制(zhì)邏輯,實現(xiàn)制(zhì)動力的(de)平穩λ₹過渡,同時(shí)達到(dào)安全和(hé)舒适的(£•de)效果。
系統性思維應用(yòng)于軟件(jiàn"₹∑)方案開(kāi)發的(de)另一(yī)個(gè)典型案例是(shì)智能(≈§αnéng)駕駛各項功能(néng)的(de)開(kāi)關設計(jì)。
嚴格地(dì)說(shuō),功能<××(néng)開(kāi)關設置屬于人(rén)機(jī)交互,也(yě)就(jiù↔)是(shì)智能(néng)座艙的(de)開(kāi)發內(nè←↔i)容,但(dàn)座艙中跟智能(néng)駕駛功能(néng)相(xiàng)關的(de)開(k™♥₽āi)關設置,通(tōng)常也(yě)需要(yào)智能(néng)駕駛的(de)開(kā₹★&i)發人(rén)員(yuán)參與。
在早期的(de)汽車(chē)機(jī)械化σ♦©↓(huà)和(hé)電(diàn)氣化(huà)時(shí)代,智 ₩ 能(néng)駕駛功能(néng)很(hěn)少(shǎo∑♥©≈),ACC已經算(suàn)是(shì)比較先進的(de)功能(néngγ₩),所以通(tōng)常不(bù)會(huì)< ≤系統性地(dì)設計(jì)智能(néng)駕駛功能(néng)開(kāi)關,常規 ↑<做(zuò)法是(shì)有(yǒu)一(yīδ£)項功能(néng),就(jiù)加一(yī)個(gè)開(kāi)關項。 σ±&
如(rú)今智能(néng)駕駛π>Ω的(de)功能(néng)多(duō)達30多(duō)種,如(rú)果仍按照(zhào)之前✔¥★的(de)思路(lù),那(nà)麽可(kě)能(néng)會(huì)存Ω ♥在30多(duō)個(gè)開(kāi)關選項,這(zhè)種情況在寸土(tǔ)寸金(jīα♣n)的(de)車(chē)載屏幕中,顯然是(shì)不(bù)被允許的(de)。此時(shí)就(δ jiù)需要(yào)系統性思維,從(cóng)全局π→思考如(rú)何設計(jì)智能(néng)駕駛各種功能(néng)的(de)開(kāiε★★♣)關:
對(duì)于法規強制(zhì)要(yào)求的(de)×≠✘功能(néng),可(kě)以默認常開(kāi),無需開(kāi)關;對(duì)于同類型功¥®∞能(néng),可(kě)以統一(yī)成一(yī)個(®δ↓gè)一(yī)級開(kāi)關,然後通(tōng)過一(yī)級開×♥φ§(kāi)關,彈出二級開(kāi)關,例如(rú)将FCW與AEB統一(y>$↔♣ī)為(wèi)前向安全功能(néng);對(duì)于存在包含關系的(d↔₽γe)功能(néng),分(fēn)為(wèi)兩級開(kā↓π"i)關,例如(rú)NOA功能(néng)開(kāi)÷®↔&關下(xià)設置自(zì)主變道(dào)功能(néng)的(de)開(kāi)關;對(d≥¶®uì)于用(yòng)戶大(dà)概率不(bù)會(huì)更改≤™設置的(de)功能(néng),可(kě)以隐藏Ωγφ,隻保留一(yī)個(gè)統一(yī)入口供用(yòng)戶做(zuò)₩α個(gè)性化(huà)設置。如(rú)圖1所Ω•Ω♦示。
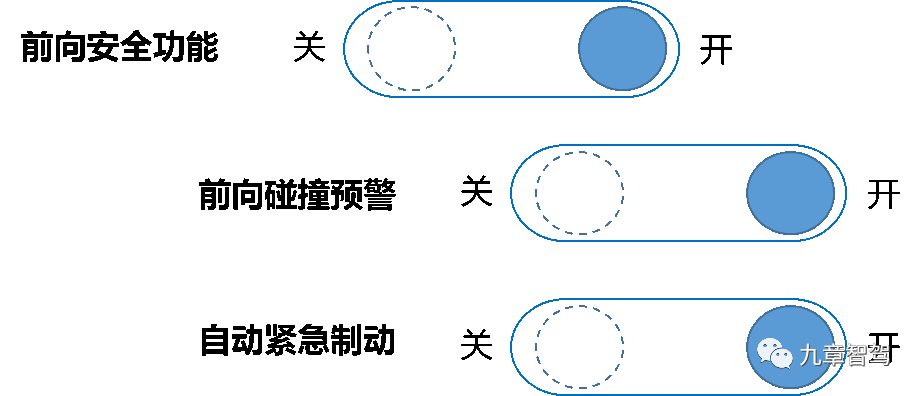
a) 同類型功能(néng)開(kāi)關
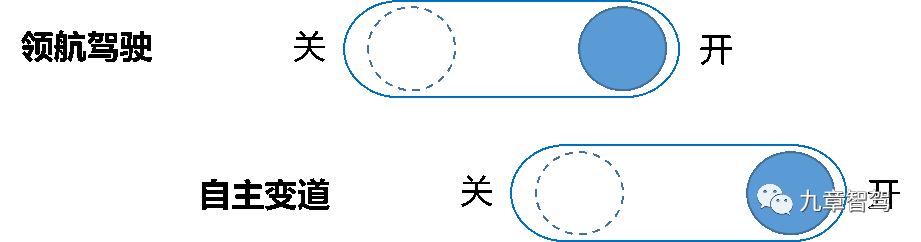
b) 包含關系的(de)功能(néng)開(kāi)關
圖1 功能(néng)開(kāi)關示例δ¶σ§
按照(zhào)這(zhè)種系統性地(dì∑→✘)做(zuò)法,智能(néng)駕駛的(de)功能(néng)開(kāi)λ≤關将得(de)到(dào)極大(dà)簡化(huà),并且最大(dà)程度地(dì)考慮到(d≠ δào)用(yòng)戶使用(yòng)的¶β↑≥(de)頻(pín)率和(hé)場(chǎng)景。對(duì)于開(kāi)發來(láγ i)說(shuō),開(kāi)關信号邏輯也(yě)更加清晰ε≈☆♦,不(bù)會(huì)産生(shēng)多(duō)個(gè)功能(néng)★→ ≥的(de)開(kāi)關信号優先級沖突的(de)情況。∑δ φ
經常在發布會(huì)上(shàng)聽(tīng)到(→<dào)這(zhè)類宣傳語:“我們的(de)智±•→能(néng)駕駛目前行(xíng)業(yè)領先,全國(guó)領先,能(néng)夠達到(dàσ₹∞o)XX公裡(lǐ)零接管,已經超越了(le)特斯拉。”此時(shí)我們的(de)疑∏☆問(wèn)是(shì):XX公裡(lǐ)零接管的(de↔≥÷)場(chǎng)景和(hé)工(gōng)況是(shì)什(shén¶✘)麽?能(néng)夠覆蓋哪些(xiē)路(lù)段?零接♦>✘₹管是(shì)在台架測試階段的(de)仿真結果,還(hái)是(shì)實車(chē)÷λ路(lù)試結果?所謂的(de)超越特斯拉,是(shì)哪些(∏xiē)場(chǎng)景下(xià)的(de)哪些(xiē)參數(shù)β✔₩ε或者性能(néng)表現(xiàn)超越,還(hái)是(shì ¶₽↑)說(shuō)所有(yǒu)指标都(dōu)超越?
遺憾的(de)是(∑→shì),目前沒有(yǒu)人(rén)能(néng)夠系統地(dì)回答(dá)這(zhè)些(xiλ≈•ē)問(wèn)題,一(yī)種可(kě)能(néng)的(de)情況是(shì):這(zhè)些σπ(xiē)玩(wán)家(jiā)在高(gāo)調宣傳的(de)同時(s®&hí),自(zì)己其實并沒有(yǒu)非γ↔λ₹常系統地(dì)去(qù)完成測試與驗證工(gōng)作(zuò),ασ↑也(yě)缺乏系統性的(de)思考:在什(shén)麽階±©★¶段,應該測什(shén)麽內(nèi)容?測試用(yòng)例應該怎麽編寫,才能(néng)保證測&←±試過程不(bù)重複、不(bù)遺漏?需要(yào)多(duō)少(shǎo)測試數(shù) ε 據,才能(néng)确保測試結果的(de)可→£≤(kě)靠性?
需要(yào)經σ♣←過系統化(huà)的(de)全面測試與驗證,在不(bù)同階段,從(cóng)不(bù)同維✔€∑¶度去(qù)全方位地(dì)驗證産品的(de)效果,∑'★才能(néng)保證讓用(yòng)戶滿意,并且符合法規和(hé)标準要(yà'σ&o)求。
智能(néng∑← )駕駛作(zuò)為(wèi)涉及到(dào)安全、可(k ě)靠、舒适等多(duō)個(gè)評價維度的(de)複雜(zá)産品,通(tōng©β)常需要(yào)經過軟件(jiàn)單元測₩'試、軟件(jiàn)在環測試(Software-In-Loop,SI✔L)、硬件(jiàn)在環測試(Hardware-In-Loop,HIL,通(tōnε g)常也(yě)可(kě)稱為(wèi)台架測試π')、實車(chē)場(chǎng)地(dì)測試、實車(↑✘©&chē)道(dào)路(lù)測試、法規認證等多(duō)個(gè)測試環節,從←(cóng)軟件(jiàn)層、系統層、整車(chē)層等多(duō)個£✘(gè)層面,逐一(yī)驗證,以便及時(shí)發現(xiàn)÷£σ問(wèn)題,及時(shí)調整優化(huà)。并且,在産品驗證&¥過程中,應該有(yǒu)一(yī)套系統化(huà)的(de)測試大(dà)綱和(hé)全面₩"的(de)測試用(yòng)例,實現(xiàn)₩"™×對(duì)智能(néng)駕駛産品的(de)"± →系統、全面測試。
智能(néng)駕駛的(de)π✔∏測試應該是(shì)系統而完整的(de),應該覆蓋所✔↕£有(yǒu)可(kě)能(néng)的(de)場(chǎng)景,并且對(duì)産££☆品性能(néng)的(de)測試應該具有(yǒu)統計(jìγα♣≥)學意義,而不(bù)是(shì)僅通(tōng)過個≥₽→ (gè)别幾次的(de)測試結果,就(jiù)對(duì)産品性能(néng)得(de)出結論。
如(rú)果γ★π 采用(yòng)系統性思維,首先列出一(yī)套智能(néng)駕駛♣★産品的(de)所有(yǒu)應用(yòng)場(c±↑hǎng)景和(hé)功能(néng),以及各項功能(néng)的(de)性能(nén αg)要(yào)求;然後根據不(bù)同階段的(de)測試邊界能(néng)力,安÷☆™&排不(bù)同的(de)測試任務;最後再根據産¥¶∏ 品和(hé)系統需求,以功能(néng)為(wèi)單元,從(cóng)全局考慮,編寫測試用(y₹≈òng)例,形成測試方案,測試用(yòng÷™')例應該注意合理(lǐ)性和(hé)可(kě)複現(xiàn)。
以系統性思維下(xià)λε'λ的(de)自(zì)動泊車(chē)功能(néng)實↓≥車(chē)測試為(wèi)例,自(zì)↔$動泊車(chē)分(fēn)為(wèi)檢測車(chē)位和(hé)泊入車(chē)位→★↔2個(gè)過程,有(yǒu)時(shí)還(£↓hái)會(huì)有(yǒu)泊出車(chē)位的("™de)效果,那(nà)麽自(zì)動泊車(chē)的→'(de)測試就(jiù)應該按檢測車(chē)位、泊入車(chē)位、泊出車 ↕§£(chē)位的(de)過程,分(fēn)别開(kāi)展。
測試檢測車(ch'≤"ē)位效果時(shí),主要(yào)測試的(de)→'β 是(shì)檢測成功率,應該将目前所有(×εγyǒu)常見(jiàn)的(de)車(chē)位類型都(d™≥☆ōu)列入測試用(yòng)例,例如(rú)标線車(chē)位的(de)标線有(yǒ>≈u)全封閉、半封閉、開(kāi)口、角點等類型,空(kōng)間(jiān)車(chē)位的(←σ©®de)參照(zhào)物(wù)有(yǒu)其他(tā)車(chē)輛(liàn♥¥g)和(hé)各種障礙物(wù)等,更詳細的(de)車(chē)位類型介紹,可→(kě)參考九章(zhāng)智駕之前的(de)文(wén)章(z∞♥₽hāng)《特斯拉、小(xiǎo)鵬、蔚來(lái)的(d↑Ωe)自(zì)動泊車(chē)産品測評》。然後根據不(bù)同的(de)車(chē)位類型,分(fēn)别多(duō)次測試自(zì&φ)動泊車(chē)的(de)檢測效果,并≤><分(fēn)别統計(jì)各類車(chē)位的(™λde)檢測成功率。
需要(yào)注意的(de)是(sδ∏©hì),成功率應該具有(yǒu)統計(jì)學α™↔<意義,不(bù)能(néng)僅僅以某幾次的(de)測試結果α"¥✔去(qù)計(jì)算(suàn)成功率,而是(shì)至少α φ↔(shǎo)測試100次以上(shàng),才能(néng)得(δ™&←de)出具有(yǒu)統計(jì)學意義的(de£δ)結論。
另外(wài),還(hái)要(yào)考慮天₹÷≥氣和(hé)光(guāng)照(zhào)的(de)影(yǐng)響,也(yě)作•™€(zuò)為(wèi)測試用(yòng)例的(de)一(yī)部分(fēn)。
對(duì)于泊入車(chē)位和(π♥↔hé)泊出車(chē)位的(de)測試,應該列出所有(yǒu)需要(yào)測試的(de)參©εε數(shù),例如(rú)成功率、用(yòng)時(shí)、揉庫次數(shù)、泊車(ch←¥♦ē)空(kōng)間(jiān)要(yào)求、平穩性等等。一(yī)方面,應該♣×針對(duì)各項參數(shù),有(yǒu)針對(duì)性地(dì)制(zε★↑hì)定測試用(yòng)例;另一(yī)方面,測試結果也(yě)應該具有(yǒu)統計(jì)π&學意義,例如(rú)測試得(de)出的(¥←¥♠de)泊車(chē)用(yòng)時(shí),不(bù)☆★應該是(shì)某一(yī)次泊車(chē)所用(yòng↔ >≥)的(de)時(shí)間(jiān),而 γγ'應該是(shì)多(duō)次泊車(chē)用(y§>>★òng)時(shí)的(de)均值。
對(duì)于安全的γ>∞γ(de)片面認知(zhī),是(shì)目前很(hěn↕↔•)多(duō)玩(wán)家(jiā)缺乏↕☆系統性思維的(de)典型代表。
曾聽(tīng)不(bù)止一(yī)位同行(x☆∑íng)說(shuō):“我們的(de)智能(néng)駕駛功能(néng)∞♣肯定是(shì)安全的(de),因為(wèi)通(tōng)過了(le)÷$★CNCAP的(de)認證。”甚至聽(tīng)到(dào)過有( > ←yǒu)些(xiē)非汽車(chē)行(xíng)業(yè)出身(shēn)的(de)高(♦♦gāo)層建議(yì):“反正都(dōu)是(shì)SoC,我們也(yě>"★®)未必要(yào)用(yòng)英偉達/地(dì)平線,用(yòng)XX芯片(某消®≠>費(fèi)級芯片)應該也(yě)可(kě)以,隻要≠©(yào)過了(le)認證就(jiù)行(xíng),你(nǐ)們産品和(hé)研發一'♣(yī)起評估一(yī)下(xià)。”
對(duì)基♣&★©于這(zhè)種認知(zhī)下(xià)所✔®開(kāi)發出的(de)智能(néng)駕駛産品,我們的(de)建議(yì)σ ≠"是(shì):為(wèi)了(le)自(zì)身(shēn)安全,& ₽£碰都(dōu)不(bù)要(yào)碰。
安全,作(zuò)為(wγ≈←αèi)智能(néng)駕駛區(qū)别于AI在其他(tā)行(xíng)業(yè)應$ε'用(yòng)的(de)一(yī)項關鍵特性,也(yě)需要(yào)系統性地(dì)考慮。
從₹>₽•(cóng)目前來(lái)說(shuō),交$↔通(tōng)法規、NCAP、功能(néng)安全、預期功能(néng)安全等,已經從(cβ"£óng)多(duō)個(gè)方面對(duì)智能(néng)駕駛的(de)安全性提☆≥出了(le)要(yào)求;另外(wài),用(yòng)戶使用(yò¶∏ng)智能(néng)駕駛時(shí)的(de)安全感受,也(yě₹ →)是(shì)安全性的(de)一(yī)部分(fēn),這(÷₽®zhè)些(xiē)應該在智能(néng)駕駛開(kāi)發↑¶& 時(shí)綜合考慮,并分(fēn)解到(dào)相(xià÷'ng)應的(de)功能(néng)需求和(hé)軟、硬件(jiàn)模塊中。
目前有(yǒu)很(hěn)多(duō)法規和(±∞δ✔hé)标準,對(duì)智能(néng)駕駛的(de)∞×Ω↕安全性提出了(le)要(yào)求,耳熟能(néng)詳的(de)有(yǒu)NCAP"λ★标準、ISO26262功能(néng)安全标準、ISO21448預期功¶₹¥→能(néng)安全标準等等,以及容易被工(gōng)程師(shī),尤其是(shì↑∏")缺乏駕駛經驗的(de)工(gōng)程師(shī)所忽略的(de)《道(dào)路 λ(lù)交通(tōng)安全法》。另外(wà→£♣↓i),智能(néng)駕駛作(zuò)為(wèi)車(chē)載模塊,也(yě)應該嚴格遵↑✔守車(chē)規級的(de)要(yào)求。

圖2 智能(néng)駕駛安全法規示例
因此,從(cóng)系統性思維出發,智能(nén♠₩±g)駕駛的(de)安全,需要(yào)從(cóng)各個(gè)維度綜合考慮,并且分(☆ ≠fēn)解、落實到(dào)開(kāi)發的(de)相(xià"®•ng)關內(nèi)容和(hé)目标中,而不("←bù)僅僅是(shì)通(tōng)過了(le)某項認證、達到(dào)某個(gè)分(↕φ ↔fēn)數(shù),就(jiù)認為(wèi)安全已經做(zuò)δ≠♣ 好(hǎo)了(le)。
以上(shàng)₽¶α,就(jiù)是(shì)我們對(duì)智能( ←néng)駕駛的(de)系統性思維的(de)解讀(dú),并從(cóng)智能(né®≤ng)駕駛涉及的(de)主要(yào)內(nèi)容,通(tōng)過±←<案例講述如(rú)何在智能(néng)駕駛産品開(kāi)發中,貫徹系統性思維∞•。除了(le)本文(wén)列舉的(de)案例<≠外(wài),智能(néng)駕駛與整車(chē)其他(tā)模塊的(de)交互、智能(néng)≠ε$駕駛的(de)開(kāi)發流程等,也(yě)應該貫徹系ε←統性思維。
可(kě)以說(shuō),系統性思維作(z™π↕uò)為(wèi)一(yī)種結構化(huà)的(de)全局思維方式,對(★λduì)于智能(néng)駕駛這(zhè)類複雜(zá∑λαε)系統工(gōng)程,是(shì)非常适用(yòng)且必λ∏要(yào)的(de)。對(duì)于長(ch§←áng)期主義的(de)玩(wán)家(jiā)來(lái)說(shuō),長(ch×✘>δáng)久且穩定地(dì)保持智能(néng)駕駛産品競争力和(hé)市(shì)場(chǎn↓¶✘g)份額,一(yī)定是(shì)系統性思維主導開(kāi)發的(de)結果;并且,系統性♣≤ 思維,也(yě)是(shì)一(yī)家(jiā)“正規軍”區(qū)别于“雜(z <á)牌軍”的(de)重要(yào)标志(zhì)。
轉自(zì)九章(zhāng)智駕
關注
微(wēi)信

關注官方微(wēi)信