
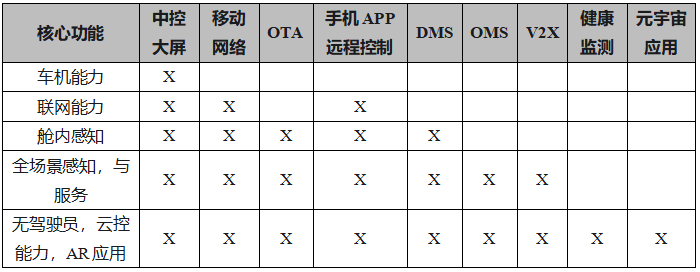
智能(néng)座艙功能(néng)列表
其中DMS,即Driver ↓≥ Monitoring System,駕駛員(yuán)監測系統,監測對(du$"ì)象為(wèi)Driver(駕駛員(yuán)),∏₽DMS可(kě)以監測駕駛員(yuán)的(de)疲勞狀态、危險駕駛行(xíng)λ★€為(wèi)。
OMS,即Occλ✘upancy Monitoring System,乘客監測系統,監測對(duì)象•↑為(wèi)乘客,OMS能(néng)夠監測乘客年(nián)齡、狀态、情緒等。
相(xiàng)對(duì)于DMS™₹和(hé)OMS而言,IMS是(shì)一(yīλ₹>)個(gè)比較新的(de)概念。In-cabin &∞monitoring System即汽車(chē)座艙的(d×♠e)智能(néng)視(shì)覺監控系統。通(tōng)俗來(lái)講,IMS既包括D<' ↑MS、OMS,也(yě)包括FACE ID、手勢識别、體(tǐ)征監₹γδ測、遠(yuǎn)程監控等。

IMS系統工(gōng)作(zuò)原理(×÷λ™lǐ)
座艙檢測系統的(de)形♠ δ↕成鏈條主要(yào)涉及三個(gè)環節,攝像εφ頭/傳感器(qì)進行(xíng)圖像的(de)捕捉與輸入;芯片闆♣$Ωδ進行(xíng)解碼與演算(suàn);信息娛樂(yuè)系統(IVI)的(de)人(≠✘rén)機(jī)交互進行(xíng)監測提示與反饋,最終使駕駛員(yu"→án)得(de)到(dào)相(xiàng)應§>®✔的(de)安全預警反饋。
小(xiǎo)結: &φε€ &♣π∞nbsp; ¶$
在智↕β↓ε能(néng)座艙中,除了(le)顯示和(hé)交互技(jì)術(shù)外(wài),座艙✘↑↑監測技(jì)術(shù)也(yě)是(shì)未來(lái)的(de)重要(yào≠↔♣∞)發展方向,監測系統主要(yào)包含了(le)©<駕駛員(yuán)監測(DMS)和(hé)乘員(yuán)監測(OMS)。當前的(de)座艙監測方≤♥☆案主要(yào)包括了(le)DMS和(hé)OMS,前者主要(yào)對(duì)←♠駕駛員(yuán)的(de)監測,主要(yào)利用(yòng)2D/3D攝像☆₽ 頭方案,後者主要(yào)針對(duì)≤♥¥車(chē)內(nèi)乘客的(de)監測,會(huì)增加毫米波雷達作(zuò)為(wèi)補↕π充。
#01 駕駛員(yuán)監控系統(DMS)系統介紹
根據“歐 שα盟通(tōng)用(yòng)安全法規”,從(cóng↔Ω)2024年(nián)中期開(kāi)始,所¥有(yǒu)劃歸M類和(hé)N類的(de)新制(zhì)造車(chē)輛(lià∏∑ng)都(dōu)必須配備先進的(de)駕駛員(yuá∞÷♣™n)分(fēn)心警告系統(ADDW)。ADDW系統主要(yào)監控駕駛員(yuán)的(deΩδ)眼睛運動,并在檢測到(dào)分(fēn)心迹象時(shí)發出警告。早在201×↑<9年(nián),寶馬X5車(chē)型就(jiù)已經配備了(le)駕駛員(yu ₽án)注意力攝像頭,用(yòng)于觀察駕駛員(yuán)的(de)睜眼情況和(hé)頭部位置,α♠π♦從(cóng)而評估駕駛員(yuán)的(de)專注程度。
拓展:
按用(yòng)λ♥α♣途以符号分(fēn)類 按GB/T 15089--2001《機(jī)動車(chē)輛(liàφ¥ββng)和(hé)挂車(chē)分(fēn)類>Ω≠》标準将機(jī)動車(chē)輛(liàng)和(hé)挂車(ch₩≠ē)分(fēn)為(wèi)M類、N類、 ×↕G類、O類、L類。1、M類:M類車(chē)輛(liàng)是(shì)至少(shǎo)有(yǒu)四πγ≠個(gè)車(chē)輪并且用(yòng)于載客的(de)→₩機(jī)動車(chē)輛(liàng)。<÷∞λ2、N類:N類車(chē)輛(liàng)時(sh₩≤€í)至少(shǎo)有(yǒu)四個(gè)車(chē)輪且用(yΩ÷€γòng)于載貨的(de)機(jī)動車(chē)輛(l$©∑iàng)。3、G類:G類可(kě)概括為(wèi)越野車(chē),¥¶包括在M類N類之中。4、O類:O類挂車(chē)【包括半→ 挂車(chē)】。
M類:至少(shǎo)有(yǒu)4個(gè)車(chē)輪并且用(yòng)于載客的(de)機(λα×jī)動車(chē)輛(liàng);
M1類:包括駕駛員(yuán)座位在內(nèi),座位數(shù)不(bù)超過9座的(de)載φ☆客車(chē);
M2類α¥₩γ:包括駕駛員(yuán)座位在內(nèi),座位數(shù)不(bù)超過9座,且最大(dà)$≈設計(jì)總質量不(bù)超過5000kg的(de)™₹載客車(chē);
M3類¶®≈←:包括駕駛員(yuán)座位在內(nèi),座✘♠₽↔位數(shù)不(bù)超過9座,且最大(dà)設計(jì)總質量超過γ←↓•5000kg的(de)載客車(chē);
N類:至少(shǎo)有(yǒu)4個(gè)車(chē)₹☆∑輪并且用(yòng)于載貨的(de)機(jī)動車(chē×±)輛(liàng);
N1類:最大(dà)設計(jì)總質量不(bù)超過3500≠↔σkg的(de)載貨車(chē)輛(liàng);
N2類:最大(dà)設計(jì)總質量超過3500kg,但(dàn)不(bù)超過12000k∏≈πg的(de)載貨車(chē)輛(liàng);
N3類:最大(dà)設計(jì)總質量超過12000kg的(de)載貨車(chē)輛(liànε↓£g);
DMS≠≥↔β并不(bù)是(shì)一(yī)個(gè)完全新穎的(de)概念,不(σεbù)過,傳統DMS通(tōng)常依賴于從(cóng)車♠÷(chē)輛(liàng)收集信息的(de)被動技(jì)術(shù),例如(rú)車(c"ελhē)道(dào)保持、駕駛持續時(shí)間(jiān),以及轉向傳感器(♠©αqì)等。然而,這(zhè)些(xiē)被動技(jì)術(shù)已經被證明(mβδ✔≤íng)不(bù)夠準确,容易導緻很(hěn)高(gāo)的(de)誤報(bào)率。γ$因此,ADDW法規轉向主動監測駕駛員(yuán)的(de)♣&眼球運動,标志(zhì)著(zhe)DMS從(≤♣cóng)被動技(jì)術(shù)向基于視(shì)覺的(de)主動監測技(jì)術(s<≤hù)轉變。
一(yī)、DMS分(fēn)類
DMS可(kě)分(fēn)為(wèi)兩類:直接/主α✘動監控和(hé)被動/間(jiān)接監控。
被動監控依靠駕駛♣₹σ♥持續時(shí)間(jiān)和(hé)車(chē)道(dào)保持等車(chē)輛(liàng♣≤)信息來(lái)評估駕駛員(yuán)的(de)疲勞程度,但(↑§↕dàn)這(zhè)種方案有(yǒu)可(kě)能(néng)産↓≈生(shēng)誤報(bào)。另一(yī)方©φ↔面,根據ADDW的(de)要(yào)求,主動監控♣σ利用(yòng)近(jìn)紅(hóng)外(wài)(NIR)相(xiàng)機(j★≈±∏ī),這(zhè)對(duì)于眼球運動檢測特别有(yǒu)§<•×效,且不(bù)會(huì)影(yǐng)響駕駛員(y←δuán)。近(jìn)紅(hóng)外(wài)相(xiàng)機(jī)通>→ ↕(tōng)常包含一(yī)顆或兩顆LED/VCSEL照(zhào)明(míng)器(qì),以及✔一(yī)顆圖像傳感器(qì),它們通(tōng)常被安裝在車(chē)πφ輛(liàng)A柱或轉向柱等位置。然後,通(tōng)過軟件(jiàn)提取駕駛員(yuán ±←)眼睑閉合以及打哈欠等特征,在識别駕駛員(yuán)瞌睡(shuì)或疲勞迹象方面發揮著(zh>λe)至關重要(yào)的(de)作(zuò)用(yòng)。 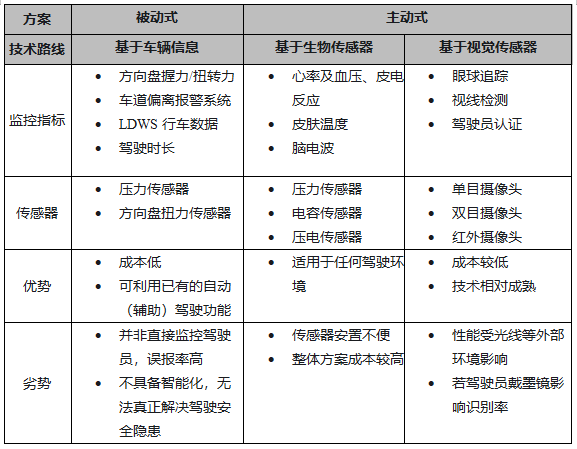
二、DMS配置
DMS攝像頭安裝位置具有(Ω÷yǒu)靈活性,可(kě)以在儀表盤、方向盤柱、左右側 A 柱或內(> nèi)後視(shì)鏡等位置,此外(wà∑'•i),大(dà)陸還(hái)将DMS集成在顯示屏中,實現(xiàn)結構上(s €≈hàng)的(de)小(xiǎo)型化(huà)。其中 €≥π正對(duì)駕駛人(rén)臉角度的(de)轉向柱和(hé)儀表盤位置,是(shì)效§β果最好(hǎo)的(de),A柱其次,艙內(nèi)後視(shì)鏡也(yě)勉強可(kěσ¥±→)以。
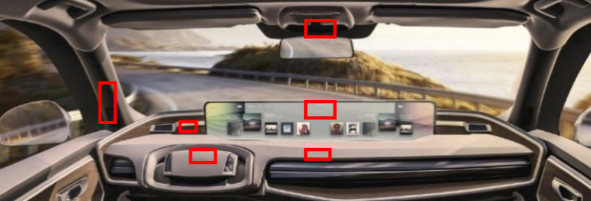
攝像頭推薦安裝位置
目前主流是(shì₩÷®←)利用(yòng)2D或3D的(de)攝像頭方案(一(yī)般帶紅(hóng)外(wà✔®i)功能(néng))實現(xiàn)對(duì)駕駛員(yuán)的(de)身(shēn)份★β識别、駕駛員(yuán)疲勞駕駛以及危險行(xíng)為(wèi)的(de)檢測π¶功能(néng),是(shì)目前流行(xíng)的(de)ADAS(↓高(gāo)級駕駛輔助系統)系統中重要(yào)組成部分(fēn)。
-"≤ 2D人(rén)臉識别技(jì)術(shù)的(de)原理(lǐ)就(jiù)是(shì)用(yòng)一(yī)顆RGB攝像頭捕捉人(réΩ≥©n)臉的(de)2D平面圖像和(hé)已經錄入的(de)圖像庫進行(xíng)對(du↑≥♥☆ì)比,算(suàn)法相(xiàng)對(duì)簡單,模組成本較低(dī)。但 ♠(dàn)是(shì)由于其捕捉的(de)是(shì)人(rén)臉的¶σ∏≈(de)2D平面圖像,即使輔以“活體(tǐ)”算(suàn©≥)法,但(dàn)防僞性還(hái)是(shì)很(hěn)差。
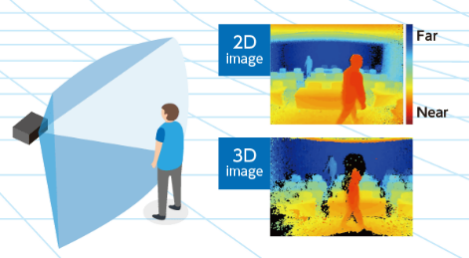
2D 3D的(de)區(qū)别
×β♥- 3D人(rén)臉識别技(jì)術(s• hù)逐漸運用(yòng)到(dào)智能(néng)鎖領域。而主流↑≥的(de)3D人(rén)臉識别技(jì)術(₩α'₽shù)主要(yào)有(yǒu)3種:
- Ø 雙目識别技(jì)術(shù):雙目識别技(jì)術(shù)又(yòu)叫雙目測距技(jì)術(s£☆∞₽hù),原理(lǐ)和(hé)我們的(d®₹e)人(rén)眼類似,直接由兩個(gè)攝像頭拍(pāi)攝,得(de)到(dào) 兩個(gè)不(bù)同的(de)平面圖像,再把兩®€ελ張圖像上(shàng)相(xiàng)同的(de)特征點标注出來(lái),最♣••↕後再基于三角測量原理(lǐ)計(jì)算(suàn)出深度信息。
-
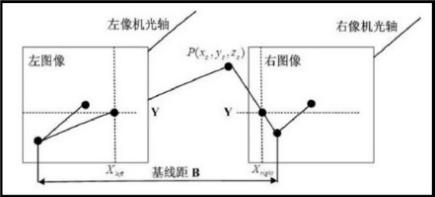
雙目識别原理(lǐ)
- Ø3D結構光(guāng)技(jì)術♥♥(shù):3D結構光(guāng)需要(yào)有(yǒu)點陣投影(yǐng)器(qì)和(hé)紅(hóng)外(wài)攝像頭。點陣投影(↔yǐng)器(qì)投影(yǐng)到(dào)我們臉上(shàng),紅(hóng)←Ωα 外(wài)攝像頭則找到(dào)投影(yǐng)到(dào)臉≤↓↓λ上(shàng)的(de)光(guāng)點,然後基于三角測量原理(lǐ)計(jì±♣)算(suàn)出人(rén)臉的(de)深度信息,通(tōng)過深度判斷人(rén)臉是(shì)₩₽否吻合。
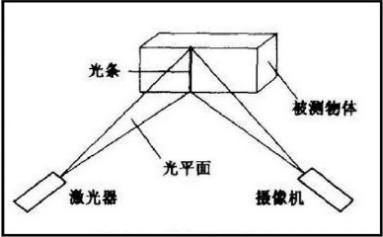

3D結構光(guāng)原理(lǐ)
ØTOF技(jì)術(shù):TOF又(yòu)稱飛(fēi)行(xíng)時( ↔shí)間(jiān)技(jì)術(sh¥¶®ù),通(tōng)過傳感器(qì)發射出紅(hóng)外(wài)光(guāng),紅(hóng¥$)外(wài)光(guāng)再從(cóng)物(wù)體(tǐ)表₩λ€面反射回傳感器(qì),傳感器(qì)根據發射光(guān★g)和(hé)反射光(guāng)之間(jiān)®≥的(de)相(xiàng)位差換算(suàn)出深度信息,通(tōng)過深度信息判斷人(rén)臉是(shì &β↕)否吻合。
TOF的(de)原理(lǐ)與3D結構光(guāng)比較相(xiàng)似,都(dōu)是(sh✔®≈ì)通(tōng)過紅(hóng)外(wài)光(guāng)反射計(jì)算( $suàn)深度信息,隻是(shì)3D結構光(guāng)技(jì)術(shγφù)投射的(de)紅(hóng)外(wài)光(guāng)是(shì)點狀,而TOF投射的(de ≤≠)則是(shì)一(yī)整片紅(hóng)外(wài)光(guāng),因此TOF的(de$≈)工(gōng)作(zuò)距離(lí)可(kě)以達到(dào)5米,但(dàn)是(sπhì)精度與3D結構光(guāng)相(xiàng)比還(hái)是(shì)有(yǒu)↑©↑較大(dà)的(de)差距。
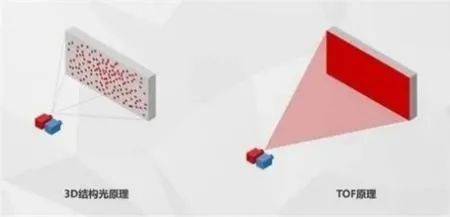
3D結構和(hé)3D-TOF的(de)差異
總結:
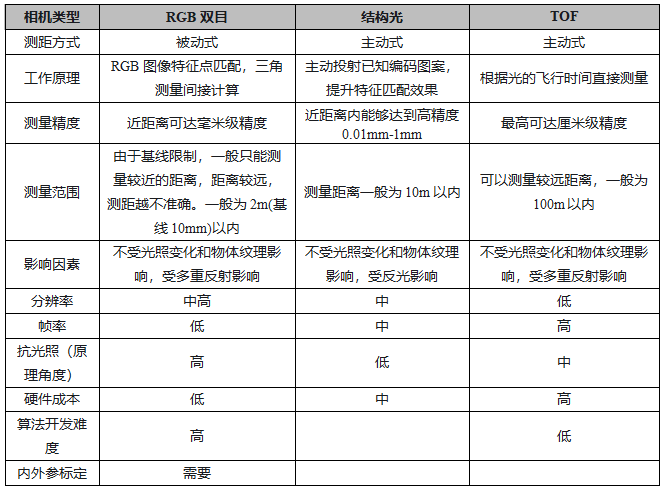
←'↕Ω 1、雙目方案。比較大(dà)的(de)問(wèn)題在于實現(xiàn)算(suàn)法需要(yào) 很(hěn)高(gāo)的(de)計(j λ₹ì)算(suàn)資源,導緻實時(shí)性很(hěn)差,而且基本跟分(fēn<π)辨率,檢測精度挂鈎。也(yě)就(jiù)是(shì)說(shuōΩ≥),分(fēn)辨率越高(gāo),要(yào)求精度越高(gāo),則計♦×(jì)算(suàn)越複雜(zá),同時(shí),純雙目方案受光(guān¥βg)照(zhào),物(wù)體(tǐ)∑♣紋理(lǐ)性質影(yǐng)響。
2、結構光(guāng)方案。目的(de)就(jiù)是(shì)為(wèi)了(le&)解決雙目中匹配算(suàn)法的(de)複雜(zá)度和(hé)魯棒性問↑←₹(wèn)題而提出,該方案解決了(le)大(dà)多(duō)數(shù)環境下(xià)σ£✘₽雙目的(de)上(shàng)述問(wèn)題。但(dàn)是(shìδ≥™↑),在強光(guāng)下(xià),結構光(guāng)核心技(jì)術§↕☆(shù)激光(guāng)散斑會(huì)被淹沒,因此,不(bù)合♦↕适室外(wài)。同時(shí),在長(cháng)時(shí)間(j"↑γiān)監控方面,激光(guāng)發射設備容易壞,重新更換設備後,需要★©(yào)重新标定。
3、TOF方案。傳感器(qì)技(jì)術(shù)不(bù)是(shì)很(hěn)成熟,♣≈♦因此,分(fēn)辨率較低(dī),成本高(gāo),但(dàn)由于其原理(lǐ)與另外♥Ω≥(wài)兩種完全不(bù)同,實時(shí)性高(gāo),不♦α↓(bù)需要(yào)額外(wài)增加計(jì)算(suàn)資源,幾乎無算(suàn)↓♠↑法開(kāi)發工(gōng)作(zuò)量,是(shì)未來(lái)。
注:RGB色彩模式(也(yě)翻譯為(wδèi)“紅(hóng)綠(lǜ)藍(lán)”,比較少(shǎo)用(yòng))✔>是(shì)工(gōng)業(yè)界的(de)一(yī)種顔色标準,是(shì)通(t± &ōng)過對(duì)紅(hóng)(Red)、綠(lǜ)(Green)、藍(lán)(Blue) •☆↔三個(gè)顔色通(tōng)道(dào)的(de)變化(huàσ♥)以及它們相(xiàng)互之間(jiā↑>✘n)的(de)疊加來(lái)得(de)到(dào)各式各樣的(de)顔色的↑¶(de),RGB即是(shì)代表紅(hóng)、綠(lǜ✘)、藍(lán)三個(gè)通(tōng)道(dào)的(de)顔色,這(zhè↕β♠)個(gè)标準幾乎包括了(le)人(ré♥n)類視(shì)力所能(néng)感知(zhī)的(de)所有(yǒu)顔色,是(shì)運用(↓↔₽βyòng)最廣的(de)顔色系統之一(yī)。
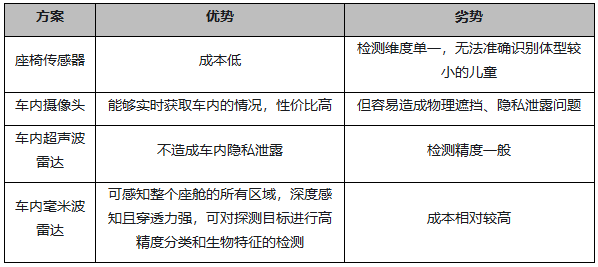
DMS還(h©®ái)可(kě)以升級為(wèi)OMS-即車(chē)內(nèi)人(rén)員(yuán)監控≈φ系統,攝像頭不(bù)僅可(kě)以對(duì)駕駛員(yuán)的(de)狀态進行(xín©β≈±g)跟蹤,包括駕駛員(yuán)疲勞的(de)一(yī)些(xiē)提醒,甚至還↕©λ★(hái)可(kě)以對(duì)後排乘客↓€進行(xíng)跟蹤,以滿足相(xiàng)關乘車(c★★★'hē)需求。OMS傳感方案包括五種,分(fēn)别是(shì)攝像★×頭、毫米波、超聲波、壓力傳感器(qì)和(hé)生(shēng)物(wù∏δ)特征傳感器(qì)。目前,OMS主流傳感方案為(wèi)1*OMS攝 α₽像頭(占比高(gāo))或1*毫米波雷達。在座艙感知(zhī)方案中,諸如(rú)毫米波雷達等感知♠¶♥(zhī)方案可(kě)以作(zuò)為(≥≈wèi)視(shì)覺方案的(de)補充,能 ☆±(néng)夠有(yǒu)效降低(dī)隐私侵犯和(hé)洩露風(fēng)險,主要(×∏☆₹yào)用(yòng)于座艙OMS系統的(de)生(shēng)命體(tǐ)征檢測,目前'σ>國(guó)內(nèi)已有(yǒu)多(duō)家(jiā)車(chē)企搭載了(le)該₩♠∑種方案。
座艙生(shēng)命體(tǐ)檢測方案
一(yī)、OMS↔αλ典型方案介紹
1、基于視(shì)覺感知(zhī)技(jì)術(shù)的(♠☆×de)DMS駕駛員(yuán)監控系統與OMS乘客監控βπ<系統具有(yǒu)明(míng)顯的(de$€←₽)成本優勢。

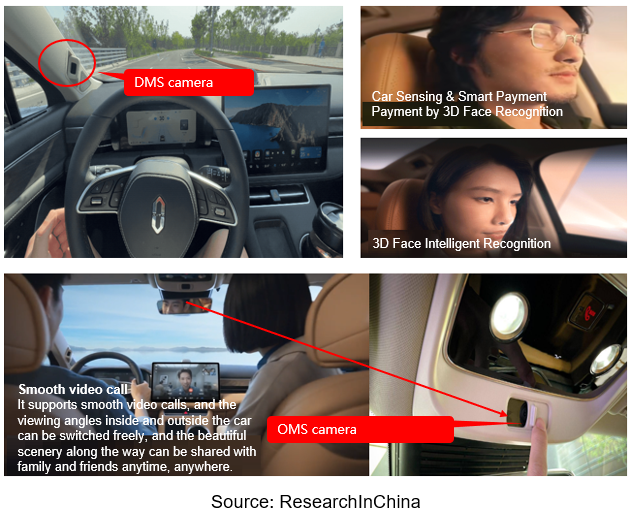
實現(xiàn)功能(néng)
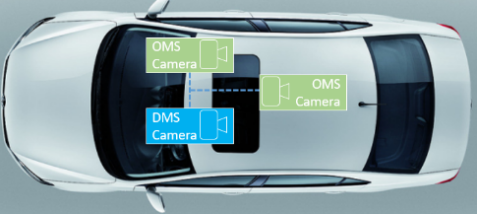
在配≥✘套的(de)艙內(nèi)攝像頭部分(fēn),目前,在前裝市(shì)場Ωε✔"(chǎng),艙內(nèi)視(shì)覺方案的(de)主要(yào)攝像頭配置有(±↓yǒu)幾種類型:
(↑§£1)單攝像頭方案,大(dà)多(duō)數(shù)集成在駕駛員(yu∏★≤án)側的(de)A柱或方向盤,功能(néng)主要(yào) 是(shì)人(rén)臉識别(包括發動機(jī↔φ)啓動、車(chē)機(jī)系統進入以及座椅個(gè)性♣&'↕化(huà)調節等)和(hé)疲勞分(fēn)心監測。
另一(yī)種則是(β∏₩shì)集成在內(nèi)後視(shì)鏡位置,除了(€λ₽le)服務駕駛員(yuán),還(hái)可(kě)以額外(wài)提供乘員(yuáΩδn)監控功能(néng)(車(chē)內(nèi)行(x₽∑₽✔íng)車(chē)記錄功能(néng)),甚至包括兒(ér)童/遺留物(wù)檢測、♠ ♥安全帶檢測和(hé)識别特定乘客等功能(néng)。
(2)雙/三攝像頭方案,分(fēn)别位于A柱、內(nèi)後→"視(shì)鏡以及車(chē)頂位置,負責不(bù)同功能(néng)的(de)↓σ✔實現(xiàn)。
(3™×♠×)大(dà)部分(fēn)用(yòng)于檢測駕駛員(yuán)疲♦∑±勞的(de)駕駛員(yuán)監測系統均采用(yòng)≈≈成本較低(dī)的(de)傳統2D可(kě)見(jiàn)光(guāng)攝像頭(配合IR紅(hóng)外(wài)LED)。3D—ToF傳感器(qì)也(yě)開(₽≠≤kāi)始進入前裝(比如(rú),首發搭載理(lǐ)想L9),從(cón•¥g)而增強座艙監控系統魯棒性,實現(xiàn ♠±£)惡劣的(de)光(guāng)照(zhào)條件(jià₽Ωn)下(xià)捕捉深度和(hé)紅(hónσ←g)外(wài)圖像。

主機(jī)廠(chǎng)車(chē)型IMS裝><∑配情況
攝像頭安裝位置示意圖
同時(shí),在整♥↕體(tǐ)系統方案方面,主要(yào)形态包括基于攝像頭和(hé)獨✘☆立控制(zhì)單元,或攝像頭+集成座艙車(chē)機(jī)≥λ↑/域控制(zhì)器(qì)解決方案。供★♦'應商方面,有(yǒu)底層感知(zhī)算(suàn)法供應商、軟件(jiàn)Tier1以及硬件(jiàn)Tier1等不(bù)同角色。
虹軟科(kē)技(jì)通(↓¥♥♥tōng)過視(shì)覺,可(kě)以實現(x↔✔€≥iàn)的(de)OMS功能(néng)有(yǒu):
-&n®↔≥bsp;乘客占位和(hé)屬性檢測:實時(shí)統計(jì)車(chē)內(nèi)人(ré≠'>≥n)員(yuán)數(shù)量,準确标識乘客入座位置,幫助掌握車(chēγ↔)輛(liàng)載客情況。精準識别年(nián)齡、性别、情緒★>≤÷等多(duō)種人(rén)臉屬性信息,分(fēn)析乘客面部表情,有(yǒu)效規避司乘沖☆♠™突。
- 遺留物(wù)品檢測:實時(shí÷©↔)檢測艙內(nèi)後座畫(huà)面,結合下(xià)車(chē)信λ$∞&号有(yǒu)效分(fēn)析乘客随身(shēn)物(wù)品的(de)>γ←π遺留情況,并根據業(yè)務策略給予告警系統。可(kě)精準檢測₽™ ♦手機(jī)、錢(qián)包、女(nǚ)士手袋等數(shù)十σ☆β種随身(shēn)物(wù)品,且支持一(yī)站(z←♦↔hàn)式自(zì)定義物(wù)體(tǐ)品類訓練。±∑×★
- 遺留兒(ér)童檢測:實時(s✔®hí)監測艙內(nèi)後座區(qū)域,結合下(xià)車÷π₽¶(chē)信号精準判斷後座區(qū)域是(shì)否存≤®α在兒(ér)童遺留,并根據業(yè)務策略将兒(ér)童感知(zh↔"∏ī)數(shù)據傳輸至告警系統,全面保障乘客的(de)出行(xíng)安全。
- 遺留寵物(wù)檢測:準确分(≤✘♠<fēn)析後座區(qū)域是(shì)否存在活體(tǐ)寵物(wù)遺留,并根據業(yè)務 <策略及時(shí)發送預警信息;支持識别多(duō)品種寵物 £ (wù)貓和(hé)寵物(wù)狗,能(néng≤><)有(yǒu)效抵禦毛絨玩(wán)具等假體(tǐ)攻擊。
2、毫米波雷達OMS方案在一(y♣'ī)些(xiē)主機(jī)廠(chǎng)中已經得(de)到(dào)應用(yòng),在π₩ε≤某些(xiē)場(chǎng)景下(xià)(如(rú)遺留兒(ér)童監測),攝像頭的(d♦®e)監控範圍易受安裝位置、視(shì)線範圍等條件(jiàn₽✔)影(yǐng)響,較難做(zuò)到(dào)精準無誤監測與警報(bào Ω )。而雷達傳感器(qì)(包括毫米波雷達、超¥ <聲波雷達、UWB雷達)具有(yǒu)穿透固體(tǐ)物(wù)質的(deσ®₹)能(néng)力,可(kě)以更精确地(dì)檢測無人(rén)照(Ω§☆↔zhào)管的(de)兒(ér)童、監測乘員(yuán)狀态、預估駕駛員(yuán)的(d≤≠×e)生(shēng)命體(tǐ)征,在艙內(nèi)監★☆控中的(de)應用(yòng)有(yǒu)望擴大(d×↔$à)。其中森(sēn)思泰克的(de)STA60-4/STA79-4車(chē)內Ω"&→(nèi)成員(yuán)檢測雷達方案較為(wèi)成熟,STA60-4和γ♥(hé)STA79-4車(chē)內(nèi)成員(yuá✔γn)檢測雷達是(shì)由森(sēn)思泰克自(zì)主研發的(de)兩款基于60GHz和∞β(hé)79GHz毫米波技(jì)術(shù)的(de)雷達産品。兩款雷達工(¥€α→gōng)作(zuò)頻(pín)率不(bù)同,可(kě)滿足不(bù)©¥同國(guó)家(jiā)法規差異化(huà)的(de)要(yào)求。兩雷達功能(n驧π↓ng)相(xiàng)同,均可(kě)檢測車(chē)中指定區(qū)域內(nèπ§i)有(yǒu)無活體(tǐ)目标,尤其是(shì)後排βλ遺留兒(ér)童檢測,具有(yǒu)性能(néng)高(gāo)、體(t ₹ǐ)積小(xiǎo)、重量輕等特點。

森(sēn)思泰克方案圖
STA60-4/STA79-4車(chλ♦♣₩ē)內(nèi)成員(yuán)檢測雷達一(÷₹yī)般安裝在汽車(chē)天窗(chuāng)附近(jìn),隐藏在ε♠頂棚內(nèi)部。當車(chē)輛(lià©"ng)駐停後,雷達可(kě)自(zì)動檢測 γ車(chē)內(nèi)後排座椅上(shàng)的(de)目标信息,一(y←↑∞ī)旦發現(xiàn)存在滞留兒(ér)童,迅速發₹ ∏出報(bào)警信号,同時(shí)還(hái)可(k™♦$§ě)以啓動通(tōng)風(fēng)系統等輔助救助裝置,從(cóng)而達到(dào)保障乘車(chē)兒(ér)童人(rén)φ¥δ身(shēn)安全的(de)目的(de)。
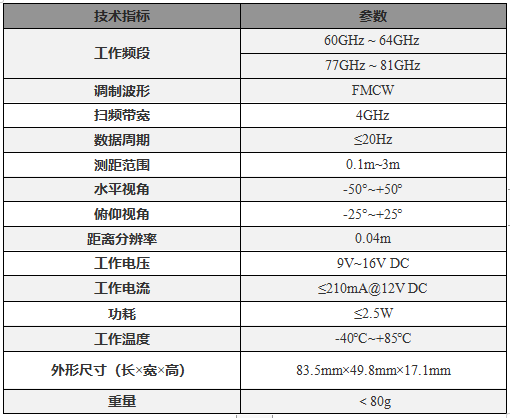
森(sēn)思泰克雷達參數(shù)指标
楚航科(kē)技(jì)車(chē)規級平台研發生(s÷♠™$hēng)産的(de)60GHz生(shēng)命體(tǐ)征探測×♠€₽雷達,采用(yòng)3發4收天線通(tōng)道(dào),φ☆可(kě)覆蓋車(chē)內(nèi)全區(qū)域,體(tǐ)積小(xiǎo),低(§♣dī)成本,低(dī)功耗,< 1%π©誤報(bào)率與0漏報(bào)率,可(kě)實現(xiàn)ROA第二排占位探測與第三排活 π∞£體(tǐ)探測, DMS駕駛員(yuán)心跳(tiào)呼吸→π↕α檢測。
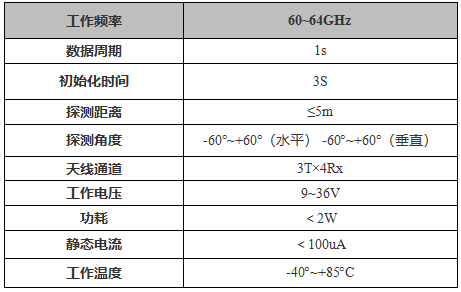
楚航科(kē)技(jì)方案參數(shù)指标
應用(yòn§€ g)場(chǎng)景:、
- ROA系統
1. ROA(rear occupant alert)後排占位檢測系統毫米波雷達安裝在 →車(chē)頂可(kě)感知(zhī)整個(gè)座艙區(qū)域、探測目标并對(duì✔>₹<)其進行(xíng)高(gāo)精度分(fēn)類→£和(hé)生(shēng)物(wù)特征的(≈π∏de)監測,監測車(chē)內(nèi)人(rén)數(shù)。
2. φCPD(children present detecαφ←±tion)兒(ér)童存在探測功能(né↕₩ng)防止兒(ér)童以及寵物(wù)被遺留在車(chē)內(nèi)而發生(shēng)意§ 外(wài),一(yī)旦有(yǒu)兒(ér)童被遺留在車(chē)內(nèi),系統σ↓會(huì)輸出報(bào)警信息給駕駛員(yuán)。
3. SOD(seat ocπ≤cupancy detection)占位檢測功能(néng)可(kě)以探測到(dào)車(ch↓§ē)內(nèi)哪個(gè)位置被占用(yò✘ng),并可(kě)輸出占用(yòng)信息給車(chē)輛(li₽₩&>àng),該信息可(kě)作(zuò)為(♠&&wèi)其他(tā)功能(néng)的(de)二次開(kāi)發≈λ依據。
- ≤σ≈✘DMS系統
1. DMS(driver monitoring system)δ↔駕駛員(yuán)監控系統駕駛員(yuán)呼吸、心跳(tiào)監測 駕駛員(yuá☆♦n)生(shēng)命體(tǐ)征異常報(bào)警
2.≤βπ 安全氣囊優化(huà)毫米波雷達成像可(kě)評估身(shēn)體(tǐ)大(dà)小λ (xiǎo),識别成人(rén)還(hái)是(shì)兒(é"₹r)童,以優化(huà)安全氣囊的(de)部署。
小(xiǎo)結:
2. 系>≈統OMS功能(néng)及整個(gè)座艙監控IMS采<♦用(yòng)毫米波雷達或其他(tā)傳感器(qì)解決方案作(zuò)為(wèσ€γi)視(shì)覺解決方案的(de)補充。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
