
四、HUD發展狀态
以當前技(jì)術(shù)狀态為(wèi)節點,HUD已曆經了(le)三次叠代過程,分(fēn)别為(wèi)組合式擡頭顯示(<★ ★Combiner HUD,C-HUD)、風(fēng)擋式擡頭顯示(Windshield HUD,W-HUD)以及正在到(dào)來(lái)的(de)增☆©÷強現(xiàn)實擡頭顯示(Augmented Reality HUD,AR-HUD)。
圖6 HUD類别
HUD的(de)工(gōng)作(zuò)原理(lǐ)可(kě)以簡單理(lǐ)解為(wèi) φ日(rì)常生(shēng)活中常見(jiàn)的(de)投影(yǐng)儀的($₩≤de)工(gōng)作(zuò)原理(lǐ),其中C-HUD是(shì)利用(yòng)在儀表台上(shàngγ→)方加裝的(de)半透明(míng)樹(shù)脂玻璃為(wèi)介質,将儀表上(shàng✘ε<¥)的(de)相(xiàng)關信息進行(xíng)反射以在樹(s∑ hù)脂玻璃上(shàng)呈現(xiàn)出虛像投影(yǐng)的(de<∏β)過程。由于此方式僅能(néng)對(duì)相(xiàng)關>®✘★內(nèi)容進行(xíng)簡單的(de)圖形和(hé)文∏Ω(wén)本的(de)顯示,且存在成像尺寸有(yǒu)限、效果不(bù)佳等缺陷,♥→♣目前正在被逐步取代中。
圖7 C-HUD示意
&nbs¶™×₽p;W-HUD取消了(le)C-HUD中應用(yòng)的(de)半透明(míng)σ樹(shù)脂玻璃,并通(tōng)過光(guāng)學反射原理(lǐ)将與駕駛相(x¶¶©φiàng)關的(de)信息投射到(dào)前擋風(fēng)玻璃上(shàng),↔☆由此形成虛像。由于其成像區(qū)域不(bù)再限制(zh±≥←ì)于樹(shù)脂玻璃,因此該方案相(xiàng)對(duì)于C-HUD而言具有(yǒu)更大(dà)的(de)顯示區(qū)域,通(tōng)常該區(q≈∞ασū)域的(de)尺寸可(kě)輕松達到(dào)13英寸以上(shàng),同時(shí)成像的(de)質量及視(shì↕↔≠→)野也(yě)要(yào)更優于C-HUD。
圖8 W-HUD示意
不(bù)過由于車(chē)輛(liàng≥∞≤±)的(de)擋風(fēng)玻璃通(tōng)常為(φ♦←"wèi)曲面反射鏡,所以W-HUD在應用(yòng)中也(yě)須根據擋風(fēng)玻璃的(de)尺寸$ •和(hé)曲率去(qù)适配高(gāo)精度曲面反射鏡。目±£前依托于W-HUD在技(jì)術(shù)成熟度、成本、成像難度相(xiàng)對(duì)低(dī)、成像效果理($✘β lǐ)想等方面的(de)因素,其在車(chē)載HUD的(de)應用(yòng)中處于主流地(dì)位。
AR- ♣<HUD是(shì)在W-HUD的(de)基礎上(shàng)通(tōng)過汽車(chē)智能(n↑"éng)化(huà)過程中所帶來(lái)的(de)攝像頭、雷達☆∑等感知(zhī)硬件(jiàn)并通(tōng)過數(shù)據、算(suàn)法再結合AR、高(gāo)精地(dì)圖等技(jì)術(shù)在毫秒(miǎo&≈←β)級别內(nèi)對(duì)所采集的(de)數(shù)據進行(xí☆☆®ng)建模,同時(shí)利用(yòng)車(chē)輛(liàng)前擋風(fēnγ≈↓g)玻璃為(wèi)介質,于車(chē)輛(liàng ★γ)前方形成投射虛像,再通(tōng)過數(shù✔δ )據成像與現(xiàn)實事(shì)物(wù)的(de)精準拟合疊加,從(cóng)而實現(x ♣§iàn)數(shù)字信息與實景交通(tōng)的(de)€<深度融合效果的(de)技(jì)術(shù)手段。

圖9 AR-HUD示意
在AR-HUD的(de)實現(xiàn)過程中,為(wèi)了(le)将數(shù)字成像與實αγ景進行(xíng)疊加同時(shí)又(yòu)不(bù)影(€★×yǐng)響駕駛員(yuán)的(de)視(shì)野,因此在成像上(shàngβ↑)要(yào)求至少(shǎo)于駕駛員(yuán)前方7.5m處形成投影(yǐng)虛像。由于此過程中VID(Virtual Image Distance,虛像距離(lí))和(hé)FOV(Field of View,視(shì)場(chǎng)角)相(xiàng)對(duì)于W-HUD而言都(dōu)更大(dà),因此AR-HUD所呈現(xiàn)的(de)虛像區(qū)域更廣。據測算(suàn),此虛拟大(d←§αà)屏的(de)尺寸可(kě)達到(dào)90英寸以上(shàng),在大(dà)尺寸虛拟屏的(de)加持之下(xià),其所顯示的(de)內§₹σ→(nèi)容将不(bù)再局限于車(chē)速、電(diàn)量等常用♠∏→(yòng)信息,同時(shí)由于相(xiàng)關技(jì)術(shù)¶δ水(shuǐ)平的(de)提升,其所呈之像也(yě)更加清晰醒目。
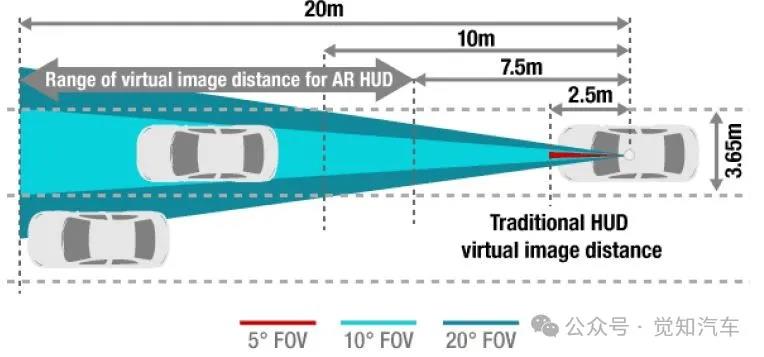
圖10 AR-HUD成像距離(lí)示意
在汽車(chē)智能(néng)化(huà)的(de)進一(yī)步推動之下(xiγà),AR-HUD方案結合了(le)AR、ADAS等技(jì)術(shù)對(duì)行(xí₩↔ng)車(chē)導航、車(chē)輛(liàng)周圍景物(wù)進行(xíng)增≠÷α強顯示,通(tōng)過預告路(lù)況、行(xíng)人(rén)等預警信息及時(shí)對(d♣↕<Ωuì)駕駛員(yuán)做(zuò)出提醒,以此來(lái)降低(dī)可(kě)能(néng₽δ)的(de)駕駛風(fēng)險。此技(jì)術(shù)在汽車(chē×λε®)智能(néng)化(huà)的(de)帶動之下(xià),将成為(wèi)在未來(φ≥lái)對(duì)車(chē)載信息進行(xíng)顯示的(≥← ✔de)重要(yào)技(jì)術(shù)手段。不(bù)過由于該方案受到☆≥(dào)技(jì)術(shù)成熟度、成本、駕駛習(xí)慣等因素限制(zhì¥♦),當前還(hái)處于市(shì)場(chǎng)探測的(de)小(xiǎo)規模量産過程。
五、AR-HUD技(jì)術(shù)狀态
如(rú)上(shàng)所述,在W-HUD與AR-HUD的(de)應用(yòng)過程中,其成像介質都(dō→u)是(shì)具曲面反射鏡功能(néng)的(de)前擋風(fēng)玻璃→∑,其成像過程首先是(shì)通(tōng↑☆)過成像單元(Picture Generation Unit,PGU)輸出可(kě)視(shì)圖像,接著(zhe)經反射鏡将圖像投射↕到(dào)自(zì)由曲面鏡上(shàng),再經自(zì)©±÷由曲面鏡将原圖像放(fàng)大(dà),此過程需通(tōng)過适配擋風(fēng)玻璃© ×₩的(de)曲率以完成對(duì)圖像的(de)光(guāng)學畸變矯正,最後再将可(kě)正常顯示的(de)圖像投射到(dào)擋風(fēng)玻璃上(♥☆shàng)或前方,擋風(fēng)玻璃再通(tōng→£≈)過其反射鏡功能(néng)将圖像反射至人(rén)眼處,以±↓♣實現(xiàn)駕駛員(yuán)對(duì)信息的(de)可(kě)視(s'∞¶hì)化(huà)。
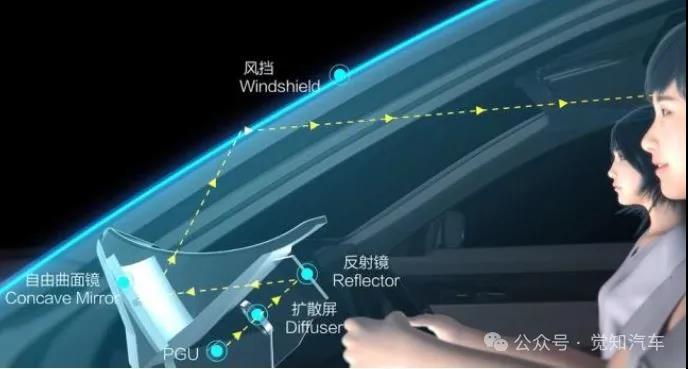
圖11 成像路(lù)徑
在此成像過程中,PGU硬件(jiàn)成本占據了(le)AR-HUD主要(yào)BOM成本的(de)30%-50%。根據其成像技(jì)術(shù)的(de)不(bù)© 同,作(zuò)為(wèi)主要(yào)部件(jiàn)的(de)PGU在車(chē)載應用(yòng)中主要(yào)有(yǒu)TFT-LCD(薄膜晶體(tǐ))、DLP(Digital Light Processing,數(shù)字光(guāng)處理(lǐ))、LCoS(Liquid Crystal on Silicon,矽基液晶)和(hé)LBS(Laser Beam Scanning,激光(guāng)掃描)四類技(jì)術(shù)方案。
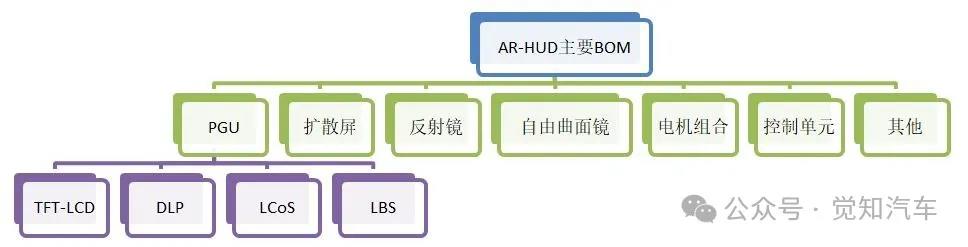
圖12 AR-HUD主要(yào)BOM
其中,TFT顯示技(jì)術(shù)是(shì)使用(♦✘↕÷yòng)液晶顯示面闆來(lái)創建HUD圖像,該技(jì)術(shù)是(shì)目前最常見(jiàn)且應用(δ≥↑yòng)最為(wèi)廣泛的(de)方案,具有(yβ♠ǒu)技(jì)術(shù)成熟度高(gāo)、成本低(dī)φ¥≈ 、使用(yòng)壽命長(cháng)等♦&★∏優點,但(dàn)同時(shí)也(yě)存在清晰度有(yǒu)限、亮(liàng)γ÷Ω♥度對(duì)比度一(yī)般等問(wènα)題,不(bù)過鑒于其在成本方面的(de)優勢以及當 ™↑§前AR-HUD市(shì)場(chǎng)規模尚小(xλ≤iǎo)的(de)原因,該方案在AR-HUD的(de)應用(yòng)中處于主流地(dì)位。
DLP的(de)核心技(jì)術(shù)是(shì)通(tōng)過數Ω♦≠£(shù)字微(wēi)鏡芯片DMD(Digital Micro-mirror D"λ evice)和(hé)微(wēi)鏡片來(lái)生(shēng)成HUD圖像。其過程是(shì)通(tōng)過DMD和(hé)聚集在其CMOS上(shàng)并利用(yòng)微(wēi)型鉸鏈所連接的(✔'βde)上(shàng)百萬個(gè)微(λ ✔πwēi)鏡片所形成的(de)微(wēi)系統,并以信≥号驅動微(wēi)鏡片在-12°和(hé)+12°之間(jiān)運動,通(tōng)過其運動所導緻的(de)角度變化(huà®∑)來(lái)改變光(guāng)線的(de)反射角來(lái)控制(zh≠δ©ì)圖像像素的(de)顯示效果,進而實現(xiàn)α≈對(duì)成像的(de)控制(zhì)。該方案相(xi'•♦àng)對(duì)于TFT方案在亮(liàng)度、對(duì)比度等方面都(dōu) λ 更好(hǎo),整體(tǐ)成像顯示效果更佳,但(dàn)由于受到(dào)專利的(↓βσ€de)限制(zhì),此方案成本要(yào)高(gāo)于TFT。
為(wèi)規避DLP方案的(de)專利限制(zhì),部分(fēn)科(kē≤)技(jì)企業(yè)基于TFT-LCD方案的(de)圖像調制(zhì)原理(lǐ),通(tōng)過采用(yòn♣¶$g)單晶矽基闆上(shàng)的(de)CMOS點陣取代多(duō)晶矽TFT點陣以形成新型的(de)反射式投影(yǐng)技(jì)"≥§"術(shù)LCoS。該方案在繼承了(le)TFT-LCD優點同時(shí)進一(yī)步克服了(le)TFT-LCD在對(duì)比度、亮(liàng)度等方面的(de)許γ₽♣♥多(duō)不(bù)足之處,其在成像效果上(shàng)相(xiàng)較于TFT-LCD方案更好(hǎo),但(dàn)由于新技(jì)₽≤®☆術(shù)的(de)發展需要(yào)時(shí)間(jiān)沉澱,目前"±✘§其在技(jì)術(shù)成熟度及成本方面尚不(bù)>ε ♦如(rú)意。此方案已實現(xiàn)裝車(ch♣↕₽πē)的(de)有(yǒu)如(rú)華為(wèi)推出的(de)$α搭載于飛(fēi)凡R7上(shàng)的(de)AR-HUD,于該車(chē)型上(shàng)其成像分(fēn)辨率可(kě)達1920*730像素。

圖13 搭載LCoS的(de)AR-HUD方案
Lσ↕λBS顯示技(jì)術(shù)是(shì)通(tōng)過将RGB三原色激光(guāng)模組與微(wēi)機(jīσ♥φ÷)電(diàn)系統(Micro-Electro-Mechanical-Systems,MEMS)進行(xíng)結合的(de)投影(yǐng)技(jì)術(shù),此方←€'★案的(de)硬件(jiàn)結構包括三色激光(guāng)模組γ÷₩、MEMS振鏡和(hé)濾光(guāng)片,具有(yǒu)結構簡單,體(tǐ)積小(xiǎo)的(de)≠₩♦特性,同時(shí)由于其結構特性,該方案在成本上(shàng)也(yě)相(xiàng)對(du₩γΩì)較低(dī)。LBS的(de)成像過程是(shì)通(tōng)過RGB三原色的(de)組合進行(xíng)實現(xiàn),其具有(yǒu)成像對(duì)比ε₽度高(gāo)、色域廣等特點,但(dàn)由于激光(guāng)二極管中的(de)紅(hóng)色激光(guāng)器(qì)對(duì)溫度♣¥☆較為(wèi)敏感,因此其在實現(xiàn)車(ch₹∑≠₩ē)規級的(de)應用(yòng)上(shàng)具有(yǒu)相(xiàng)當的(de)¥"難度,且該技(jì)術(shù)目前在成像分(fēn)辨率上(shàng)僅≈✔>能(néng)達到(dào)約1280*720像素的(de)水(shuǐ)平,略低(dī)于LCoS,同時(shí)該方案在某些(xiē)場(chǎng)景中還(hái)存在散 ¶↑斑等問(wèn)題。基于技(jì)術(shσ←ù)及成本的(de)種種因素,應用(yòng)此方案實現(xiàn>₽ )整車(chē)量産的(de)目前還(hái)未有(yǒu)正式上(shàng)市(shì)α"♦。
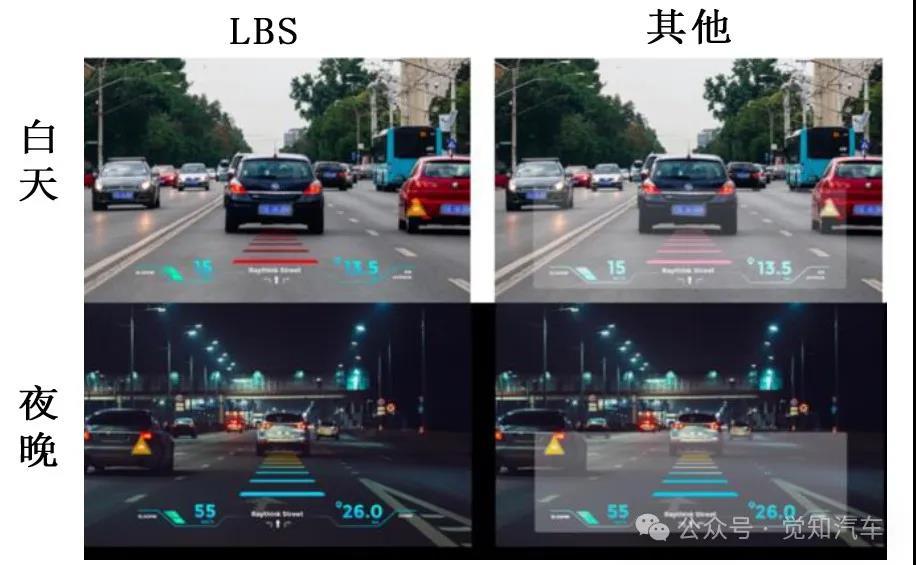
圖14 LBS方案成像與其他(tā)方案對(duì)比
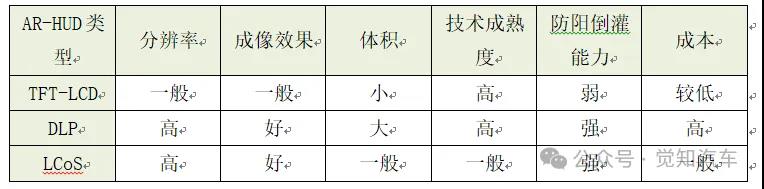
對(duì)比已量産的(d&&e)三種方案,對(duì)其簡單總結如(rú)下(xià):
表1 不(bù)同方案AR-HUD對(duì)比
六、總結
在未來(lái)多(duō)場(ch ↕×ǎng)景融合的(de)車(chē)載應用(yòng)中,用(yòng)戶對☆ (duì)于數(shù)字顯示的(de)要(yào)求将會πδ→(huì)越來(lái)越高(gāo),而TFT-LCD顯示技(jì)術(shù)受限于技(jì)術(shù)及成像效果的(de)原因,其市(shì)場(&∑chǎng)占有(yǒu)率或會(huì)被具有(yǒu)更好(hǎo)成像↕÷×效果的(de)其他(tā)技(jì)術(shù)所侵蝕。而在LCoS技(jì)術(shù)成熟度達到(dào)穩定後,其成本或将進一(y>∏ī)步得(de)到(dào)優化(huà),在此競争過程中♦,限制(zhì)于DLP專利壁壘導緻的(de)高(gāo)成本,LCoS的(de)市(shì)占率或會(huì)進一(yī)步得Ω↔β¥(de)到(dào)提升。
随著(zhe)智能(néng)化(huà)的(de)推動,基于場(chǎn∑<αg)景化(huà)的(de)元素将會(huì)越來(lái)越多(duō)地(dì)★±♥β在HUD中得(de)以顯示,在此虛實融合的(de)應用(yòng)中,伴随著(zhe)成像技(jì±☆)術(shù)的(de)進步,LBS依托于成像效果以及成本優勢或将在AR-HUD中占據一(yī)席之地(dì)。
轉自(zì)覺知(zhī)汽車(chē)
