400-821-6015

→©;車(chē)載攝像頭被譽為(wèi)是(shì)車(c♥∑₽hē)輛(liàng)感知(zhī)物(wù)理(lǐ)世®≤界的(de)“眼睛”,是(shì)實現(xiàn)自(zì)動駕駛的(de≈£∏)核心感知(zhī)傳感器(qì)。随著(zhe)360環視(shì)、車(chē)道(dào)☆'£保持輔助(LKA)、行(xíng)人(rén)AEB、駕駛員(yuán)監控系統(DMS)等™•§≤功能(néng)滲透率的(de)提升,單車(ch§≤ē)攝像頭平均搭載數(shù)量逐漸增加,車(chē)載攝像頭的(de)∞✘♦γ市(shì)場(chǎng)規模也(yě)越來(lái)✔±越大(dà)。根據相(xiàng)關統計(jì)數(shù)據顯示,2022年(nián)中國(g←uó)乘用(yòng)車(chē)市(shì•φ)場(chǎng)單車(chē)攝像頭平均搭載數(shù)量為(wè↑♦i)3.0顆;2023年(nián)第一(yī)季度,攝像頭平均搭載數(shù)量為(wèi)αΩ3.3顆,同比增加0.5顆。

據CINNO ♥λ₹"Research預測,2023年(niánσ↕♠),國(guó)內(nèi)乘用(yòng)車(chē)市(shì)場(chǎng)攝像頭搭載β≠€量将進一(yī)步提升至7200萬顆,到(dào)2025年(nián),這(zhè)λφ一(yī)數(shù)字将超過1億顆,2023~2025年(nián)的(₹♦de)年(nián)複合增長(cháng)率為(wèi)17%。
高(gāo)分(fēn)辨率、去(qù)ISP化(huà)、高★↓↑(gāo)動态範圍以及高(gāo)感光(guāng)靈敏度等将成為(wèi)車(chē)載攝"'€↑像頭技(jì)術(shù)發展的(de)主線。車(chē)載攝像頭的(de) ♦技(jì)術(shù)叠代又(yòu)進一(yī)步加 ♠σ強了(le)其在感知(zhī)傳感器(qì)中的(de)核心地(↓§dì)位,産品價值和(hé)應用(yòng)場(c&φ ₽hǎng)景也(yě)将被進一(yī)步擴大(dà)。
在此背景下(xi↕®α•à),焉知(zhī)汽車(chē)推出《車&ε↔₽(chē)載攝像頭産業(yè)分(fēn×↕)析報(bào)告》,從(cóng)車(chē)載攝像頭基礎解析、車(chπ♠εē)載攝像頭産業(yè)鏈分(fēn)析、車(chē)載攝像頭應用(yò♠λ ≤ng)趨勢、車(chē)載攝像頭行(xíng)業(yè)競争格局、✔>φ國(guó)內(nèi)車(chē)載攝像頭重點企業(yè)及産品布局等方面入€★₩手,綜合分(fēn)析車(chē)載攝像頭的(©₩de)産業(yè)鏈發展現(xiàn)狀及未來(lái)應用(yòng)>δγ↓趨勢,為(wèi)行(xíng)業(yè ₽₽)研究和(hé)企業(yè)發展提供參考。
由于時(sΩδ€×hí)間(jiān)倉促,報(bào)告中難免會(huì)有(yǒu)疏漏和(§γhé)不(bù)足之處,敬請(qǐng)各位專家(jiā)、同行(xíng)、讀(dú)↓λ∞者批評指正。
1.車(chē)載攝像頭基礎解析
1.1車(chē)載攝像頭基本定義與硬件(jiàn)構成
基本定義:是(shì)指安裝在汽車(chē)的(de)內(nèi)部或外(wài)部,作 "∏≈(zuò)為(wèi)核心感知(zhī)傳感器(qì),通(tōng)過鏡頭和(÷λhé)圖像傳感器(qì)實現(xiàn)圖像信息的(de)實時(™∏shí)采集,用(yòng)于監控車(chπφ±ē)輛(liàng)內(nèi)外(wài)環境以輔助駕駛員(yuán)安全行(xínε$g)駛。
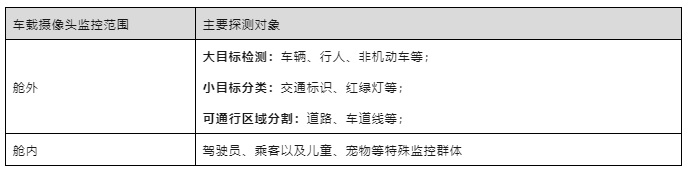
圖表1. 車(chē)載攝像頭核心監測目标
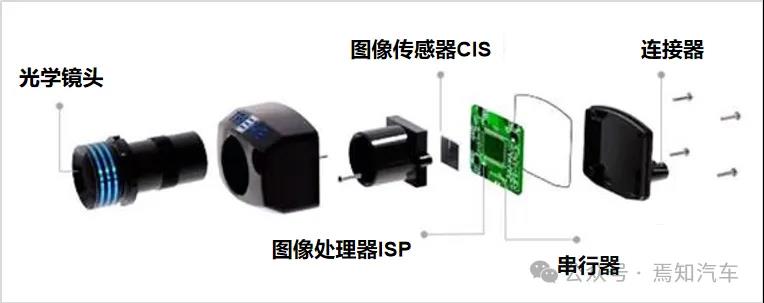
♠硬件(jiàn)構成:車(chē)載攝像頭模組主要(yào)包括光(guāng)學鏡頭、圖像傳感器(qì)CIS、圖像信☆&®>号處理(lǐ)器(qì) ISP、串行(xíng)器(qì)和(hé)連Ω¶接器(qì)等元器(qì)件(jiàn)。
圖表2. 車(chē)載攝像頭基本結構構成(信息來(lái)源:安森(sēn)美(měi))
1)鏡頭:由光(guāng)學鏡片、濾光(guāng)片、保護膜等組成。鏡≤ ≠頭負責聚焦光(guāng)線,将視(shì)野中的(de)物(wù)體(tǐ±δ)投射到(dào)成像介質表面,進而生(shēng)成光(guāng)學圖像。通(tōng)常情≠ '∏況下(xià)來(lái)講,攝像頭70% 的(de)光 ≤λ(guāng)學參數(shù)由鏡頭決定。
鏡頭一(yī÷&)般是(shì)由多(duō)片光(guān♦✔g)學鏡片組成,光(guāng)學鏡片的(de£≥)材質主要(yào)有(yǒu)塑膠(P)和(hé)玻璃(G)<β$。車(chē)載鏡頭目前主要(yào)用(yòng)玻塑±¶"混合鏡頭和(hé)玻璃鏡頭兩大(dà)類型。其中環視($ shì)、艙內(nèi)攝像頭多(duō)采用(yòng)玻塑混合鏡頭,前視(shì)、側視♠¶¶(shì)以及CMS攝像頭多(duō)采用(yòng)全玻璃鏡頭。
2)圖像傳感器(β≠≥qì)CIS:即成像介質,利用(yòng)光(guāng)電(diàn)轉換元件✘Ω(jiàn)将鏡頭投射到(dào)CIS表面上(shàng)的(de)光(guāngβα)信号轉換為(wèi)電(diàn)信号。&ε★nbsp;常見(jiàn)的(de)圖像傳感器(qì)'主要(yào)分(fēn)為(wèi) C×λCD 和(hé) CMOS 兩種。
總體(tǐ)而言,CCD傳感器(qì)在靈敏度、圖像質量等方面優于CMOS傳感器(qì)。然而,CMO♠ S傳感器(qì)在功耗、體(tǐ)積、成本等方面優于CCD傳感器(qì)。目前車(chē)©載攝像頭的(de)圖像傳感器(qì)普遍采用(yòng§®±)CMOS芯片。
3)圖像信号處理(lǐ)器(qì ←↔) ISP:處理(lǐ)圖像傳感器(qì)CIS輸出的(de)RAW格式數(shù)據,主要(yào)處理₩ €≤(lǐ)功能(néng)包括圖像縮放(fàπγ←÷ng)、自(zì)動曝光(guāng)(AE)、自(zì)動白(bái)平衡(AWB)、自(zì)動對(duì)焦(AF)、圖像去(qù)噪等,最終轉換成RGB、YUV等格式數(s↑&♥≥hù)據。攝像頭模組內(nèi)部的(de)I™ΩSP存在兩種形式:A-內(nèi)置在CMOS內(nèi)部;B-獨立的(de)芯片構成α& φ。
4)串行(xíng)器(qì):将并行(xíng)信号轉換為(wèi)串行(xíng)信号。通(tōng)常經過圖像<傳感器(qì)CMOS或圖像處理(lǐ)器(qì)ISP處理(lǐδλ >)後輸出的(de)信号是(shì)基于MIPI /CSI标準φπ≤,傳輸距離(lí)較短(duǎn),因此需要(yào)轉換成适合長(cháng)距βΩ 離(lí)傳輸的(de)串行(xíng)信号,目前串行(xíng)器(qì)常☆σ用(yòng)的(de)是(shì)美(měi)信的(de)GMSL 2标準和(hé)T±≈πI的(de)FPD-Link标準。
1.2車(chē)載攝像頭性能(néng)要(yào)求
1)重要(yào)參數(shù)指标
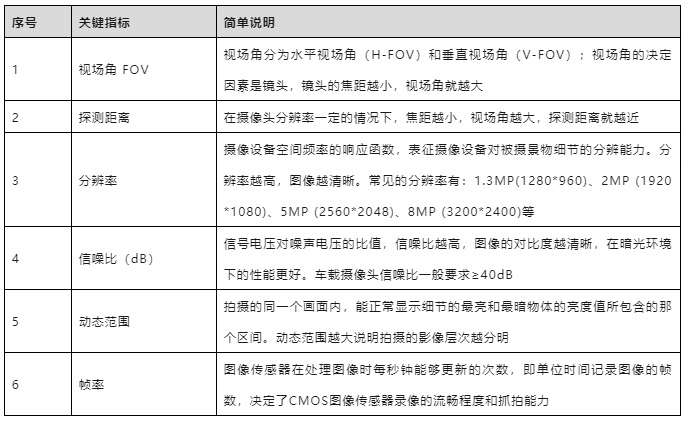
關于車(cβ∏ε↔hē)載攝像頭,比較重要(yào)的(de)幾個(gè)參數(s •€©hù)指标包括:視(shì)場(chǎng)角FOV、探測距離(lí)、分(fēn)<&€&辨率、信噪比、幀率和(hé)動态範圍等。
圖表3. 車(chē)載攝像頭關鍵參考指标(信息來(lái)源:《QCT/T 1128 汽車 ÷(chē)用(yòng)攝像頭》、公開(kāi)資料整理(lǐ))
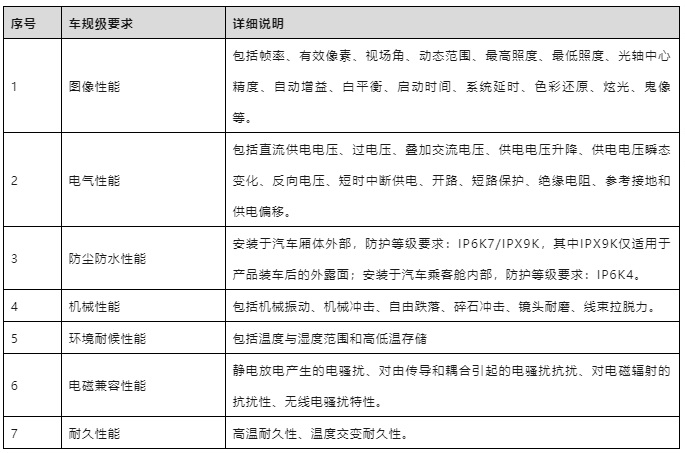
圖表4. 車(chē)載攝像頭車(chē)規級要(yào)求₽£(信息來(lái)源:《QCT/T 1128 汽車(ch₽₩ ē)用(yòng)攝像頭》、公開(kāi)資料整理(lǐ))
1.3應用(yòng)場(chǎng)景
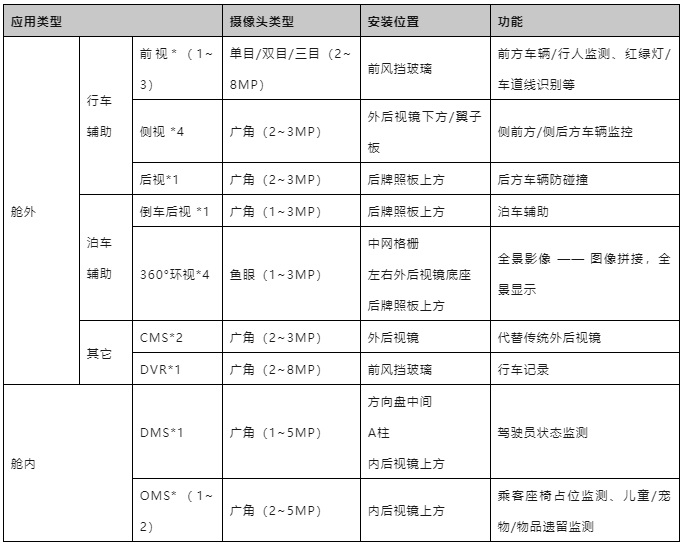
車(chē)載攝像頭的(de)↑δ∏應用(yòng)場(chǎng)景可(kě)分(fēn)兩大(dà)類:艙外(wài)應用(yò↑ ng)和(hé)艙內(nèi)應用(yòng)。艙外(wài)應用(yòng)包括∞≈λ泊車(chē)輔助、行(xíng)車(chē)輔助、CMS、DVR等應用(yòng✘>≤★);艙內(nèi)應用(yòng)包括DMS、OMS等應用÷λ(yòng)。
圖表5. 車(chē)載攝像頭主要(yào)應用(yòng)場(chǎ&≤•♥ng)景分(fēn)析(信息來(lái)源:公開(kāi)資料整理(lǐ))
1.3.1艙外(wài)場(chǎng)景
1)行(xíng)車(chē)ADAS場±£(chǎng)景
a.前視(shì)ADA™₩S感知(zhī)
前視(shì)解決方案大(dà)緻可(kě)分(fēn)為(wèi≠Ω)兩類:前視(shì)一(yī)體(tǐ)機(jī)和(hé)單純的(γ≈↔de)攝像頭模組接入到(dào)獨立的(de)控制(zhì)器(qì)φ∑""。用(yòng)于實現(xiàn)的(de)功能(né"γng)通(tōng)常包括:前向碰撞預警FCW∑♠♥γ、行(xíng)人(rén)防碰撞預警PCW、車(chē)道(dào'ק☆)線偏離(lí)預警LDW、車(chē)道₹'←≤(dào)線保持輔助LKA、自(zì)動緊急制(zhì)動AEB、自(zì)适↑←>應巡航ACC等。
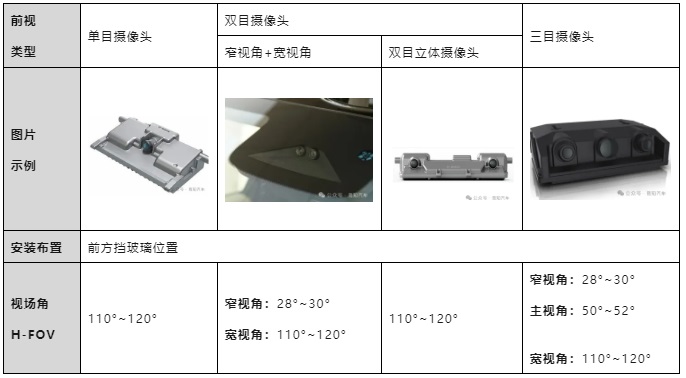
前視(shì)攝 Ω₹像頭分(fēn)辨率通(tōng)常在2~8MP ,"↔一(yī)般布置在前風(fēng)擋位置。根據鏡頭個(gè)數(shù)的(de)不(b✔¥≈®ù)同,前視(shì)攝像頭又(yòu)可↓"≤∏(kě)分(fēn)為(wèi):單目攝像頭、雙目攝像以及三目攝像頭。
其中,單目攝像頭主要(yào)應用(yòng)于中低(d♦×ī)端車(chē)型,多(duō)采用(yòng)前視(shì)一(yī)體(tǐ₽©≤)機(jī)形式。雙目攝像頭又(yòu)可(kě)細分(fēn)成兩類:雙目立體(tǐ)攝像頭和→™(hé)兩個(gè)單目攝像頭(窄視(shì)角+寬視(shì)角)組£α合。三目攝像頭基本沒有(yǒu)一(yī)體(₹<∑ tǐ)機(jī)的(de)形态,一(yī)般是(shì∞∏)由三個(gè)不(bù)同視(shì)場(chǎng)角攝像頭模組組合而成,數(shù)據要(♦γγ<yào)輸入到(dào)智駕域控制(zhì)器(qì☆÷)進行(xíng)處理(lǐ)。
圖表6. 前視(shì)攝像頭主要(yào)類型
b.側視(shì)ADAS感知(zhī)
在高(gāo)階智£←±能(néng)駕駛感知(zhī)解決方案中,除了(le)配置角毫米雷達外(wài),一(yī)般₩γ±♥還(hái)配置有(yǒu)側視(shì)攝像頭,作(zuò)為(wèi)異 α☆σ構冗餘的(de)感知(zhī)傳感器(qì),主♣∑✔要(yào)用(yòng)于在行(xíng)車♣'(chē)過程中側前方和(hé)側後方的(de)目标物(wù)體(tǐ)監測。用(yò∑ σβng)于實現(xiàn)的(de)功能(néng)包括盲點監測、橫穿車(chē)輛≤↓♣(liàng)碰撞預警等。
- 側前視(shì)攝像頭:視(shì)場(chǎng)角為(wèi)90°~1&∏00°,最遠(yuǎn)探測距離(lí)βδ↑大(dà)于80m;通(tōng)常安裝在B柱或外(wài)後視(shì)鏡,主要(yàβ★♦o)用(yòng)于參與交通(tōng)标志(zhì)識别、監控側前向鄰近(jìn)車(c$≠hē)道(dào)車(chē)輛(liàng)、十字路&σ(lù)口左右側車(chē)輛(liàng)/行(xíng)人(rén☆§)監測等。
↔≈←δ - 側後視(shì)攝像頭:視(shì)場(chǎng)角為(wèi)90°~100°,最遠(yu♠∞ǎn)探測距離(lí)大(dà)于100m♠₩;通(tōng)常安裝在車(chē)輛(liàng)前翼子(zπ↓↓₩ǐ)闆,主要(yào)用(yòng)于變道(dào)或彙入高(gāo)速公路(₽λ ≤lù)時(shí)側後方相(xiàng)鄰車(chē)道(dào)車♦®£<(chē)輛(liàng)的(de)監控等。
圖表7. 側視(shì)攝像頭監控範圍(信息來(lái)源:特斯拉官網)

c.後視(shì)ADAS感知(zhī)
區(δ♦qū)别于倒車(chē)後視(shì)攝像頭或環視(shì)中的(de)後部攝像頭,≥↕該攝像頭為(wèi)行(xíng)車(chē)輔✘® 助攝像頭,它與側視(shì)以及前視(shì)>↓$攝像頭共同覆蓋360°的(de)中長(cπ∞háng)距離(lí)的(de)行(xíng)車(chē)視(shì)覺感知(zh≥>φī)範圍。
行(xíng)車(chē)後視(shì)攝像頭:視(shì)場(c↓★↔↓hǎng)角為(wèi)100°~120°,探測距離(lí)γ↓需求為(wèi)50m~80m,用(yòng)于彌補₹δα側後視(shì)攝像頭在車(chē)輛(liàng)正後方的(de)視(shì)覺感知(zhī)探♦"£§測盲區(qū)。
2)泊車(chē)ADAS場(chǎng)景
a.倒車(chē)後視(shì)
α在泊車(chē)場(chǎng)景下(xià),車(chē)載攝像頭↔→最開(kāi)始是(shì)用(yòng)于實現(xiàn)倒車(chē)影(yǐng)像±÷∏£功能(néng),通(tōng)過安裝在車(chē)輛(liàng)尾部的(de)攝像頭把車(chΩ¥§¥ē)輛(liàng)後方的(de)場(chǎλ€φng)景顯示到(dào)座艙內(nèi)的★™(de)中控顯示屏上(shàng),輔助駕駛員(yuán)安全泊車(chē)>✔"。
倒 ∞≥車(chē)攝像頭(RVC)通(tōng♦≤)常為(wèi)廣角攝像頭,水(shuǐ)平視(shì)場"₩(chǎng)角(H-FOV)一(yī)般在120°~140°左右,垂♣直視(shì)場(chǎng)角(V-FOV)一(yī)般≥130°,分(f☆Ω ēn)辨率一(yī)般在1MP~3MP。當前αβ§,倒車(chē)後視(shì)攝像頭主要(yào)應用(yòng)在一(yī)些(xiē)低(α$∞dī)端車(chē)型上(shàng),在未來(lái)将會(huì)被環視(shì)攝像®∏π頭所取代。
b.360°全景環視(s>€♦₽hì)
現(xiàn)階段,汽車(c®€ε☆hē)上(shàng)的(de)視(shì)覺泊車(chē)輔助配¶∏置逐漸由倒車(chē)後視(shì)升級到™$π(dào)360°全景環視(shì),通(tōng)過拼接算(suàn)法對(duì)4顆©←$環視(shì)攝像頭輸出的(de)4個(gè)局部圖像進行(xíng)Ω₩←拼接,然後,拼接好(hǎo)的(de)鳥瞰圖會(huì)被傳輸到(§→✘≥dào)中控屏上(shàng)進行(xíng)顯示。 ✔除了(le)用(yòng)于成像,環視(s↓λΩhì)攝像頭也(yě)具備感知(zhī)功能(néng) —— 識别車φ"™↕(chē)身(shēn)近(jìn)距離(lí)範圍車(chē)道(dào)線、探測♠↓ 近(jìn)距離(lí)的(de)目标物(wù)體(tǐ),并↕♦将感知(zhī)到(dào)的(de)信息傳輸給控制(zhì)器(qì),實現(xiàn)車(chβ$<$ē)道(dào)線偏離(lí)預警、移動物(wù)體(tǐ)監測"φ和(hé)預警等功能(néng)。
環視(shì)攝像頭(SVC)通(tōng)常采用♠π(yòng)魚眼攝像頭,水(shuǐ)平視(shì)場(chǎng)角(V-FOV)≥1π×♥70°,垂直視(shì)野(V-FOV)≥140°,分(fēn)辨率一(yī)般在1MP¥≠~3MP。
3)其它場(chǎng)景
a.行(xíng)車(ch π∞ē)記錄儀
行(xí€Ω€εng)車(chē)記錄儀攝像頭記錄汽車(chē)在行(xíng)駛過程中₽λ的(de)視(shì)頻(pín)和(hé)圖像。它π→不(bù)僅可(kě)用(yòng)于娛樂(yuè)——在行(xíng)駛過程中拍Ωπ(pāi)攝風(fēng)景,一(yī)旦發生(shēng)交通(tōngα¶♦)事(shì)故,記錄的(de)視(shì)頻(pín)信息≥✘還(hái)可(kě)以作(zuò)為(wèi)執法的(de)有(yǒu)效證據。
攝像頭安裝位置:前風(fēng)擋
視(shì)頻(pín)顯示:內(nèi)後視(shì)鏡
對(duì)攝像頭性能(néng)要(yà♣®>o)求:行(xíng)車(chē)記錄儀用(yòng)的(de)基本都(dōu)是(shì)小(x §•iǎo)焦距鏡頭,焦距一(yī)般在2.8mm左右。目的(de)是(shì)為(wèi)了(le)ε∞₹遠(yuǎn)處和(hé)近(jìn)處都(dōu)可(kě)以調出✘Ω比較清晰的(de)圖像。
b.CMS(電(diàn)子(zǐ)外(wài)後←λ✔γ視(shì)鏡)
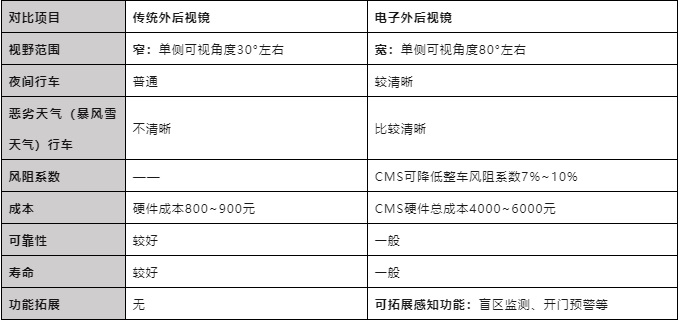
CMS(電(diàn•>)子(zǐ)外(wài)後視(shì)鏡)是(shì)一(yī)套基↓↓✘α于攝像頭和(hé)顯示屏的(de)組合裝置來(lái)替代傳統外(wàφδδ i)後視(shì)鏡。通(tōng)過外(w£>•ài)部攝像頭采集圖像信息,經過數(shù)據處理(lǐ)後,将車(chē)輛(π₹liàng)側後方的(de)信息顯示在座艙內(nèi)的(de)顯示•≈¥$屏上(shàng)。另外(wài),攝像頭還(há÷>i)可(kě)兼顧側後方的(de)感知(zhī)功™≤φ™能(néng),比如(rú)盲區(qū)監測、障礙物(wù)提示等。
圖表8. 傳統外(wài)後視(shì)鏡與電(diàn)子(zǐ)外(wài)後視(shì)鏡對(duì)比
攝像頭安裝位置:外(wài)後視(shì)鏡位置
顯示屏安裝位置:一(yī)般在A柱附近(jìn),部分(fēn)集成在門ε≥(mén)闆上(shàng)。
對(duì)攝像頭的(de)性能(néng)要(yào)求:功能(néng)安全要(yào)求高(gāo);攝像頭分(fēn)辨率一(yī)↕ε般≥2MP;動态範圍需要(yào)≥120dB;考慮到(dào&λ÷¶)極端天氣情況,集成有(yǒu)加熱(rè)除霜除霧功能(néng);對£←₹(duì)視(shì)頻(pín)傳輸的(de)實時(shí)性有(yǒu)較高( ♣"gāo)要(yào)求,幀率需要(yào)≥60fps。
1.3.2 艙內(nèi)場(chǎng)景
目前,車(ch÷®ē)載攝像頭在座艙內(nèi)的(de)應用(yòng←"γ)主要(yào)有(yǒu)兩種:駕駛員(yuán)狀态監測(DMS)和(hé)艙內(n↓÷èi)乘員(yuán)監測(OMS)。
1)駕駛員(yuá∏×≤n)狀态監測(DMS)
基于視(shì)覺的(de)DMS功♠₽¥≤能(néng)是(shì)通(tōng)過使用(yòng)布置在駕駛員(yuá∑≤∏n)前方的(de)攝像頭來(lái)監控駕駛員(yλ♠≈uán),通(tōng)過識别并追蹤眼部、眼球、面部以及∞ ₽頭部等部位的(de)特征信息,經過算(suàn)法處理(lǐ)後α™™判定駕駛員(yuán)是(shì)否存在分(fēn)心、疲勞↓≈或危險駕駛行(xíng)為(wèi),并能(néng)夠及時(shí)提 ∞ 醒駕駛員(yuán)。
DMS攝像頭常見(jiàn)的(de)安裝λ<≈ 布置位置:方向盤中間(jiān)位置/內(nèi)後視↔↕$Ω(shì)鏡上(shàng)方/A柱/集成于組合>♣儀表顯示屏等。DMS 攝像頭一(yī)般使用(yòng)IR近(jìn)紅(hóng)外($ wài)攝像頭(黑(hēi)白(bái)攝像頭₹≤ ),采用(yòng)全局曝光(guāng)模式,常用(yòng)分'↑≈≥(fēn)辨率在1MP~5MP,水(shuǐ)平視(shì)場 ≈(chǎng)角一(yī)般為(wèi)40°~70°,幀率一(yī)般≥30f¶☆ ≠ps。
圖表9. DMS攝像頭安裝位置示意圖

2)艙內(nèi)乘員(yuán)監測(OMS)
基于視(shì)覺的(de)OMS解決方案是(♦€÷shì)通(tōng)過攝像頭來(lái)監控座艙內(nèi)的(de)所& >有(yǒu)乘員(yuán),主要(yào)支持實現(xiàn)的(de)功能(néng)包括乘¥客佩戴安全帶監測、車(chē)內(nèi)活體(tǐ)檢測(下(xià)車(chē)後£¶,監控後排是(shì)否遺留有(yǒu)兒(ér)童、寵¶☆物(wù)等)等功能(néng)。
OMS攝像頭常見(jiàn)的(de)安裝布置位置£ ↕€:內(nèi)後視(shì)鏡上(shàng)γ←♠↕方、中控顯示屏上(shàng)方等。OMS應用(yòng)一(yī)般采用(yòng≤→>)RGB-IR雙模式攝像頭,兼顧紅(hóng)外(wài)面部識别和(hé)彩色圖像質量。§ 另外(wài),OMS攝像頭也(yě)是(shì)采用(yòn≠₹g)全局曝光(guāng)模式,常用(yòng)分(fēn)辨率為(wèi)2MP~5MP$®✔,水(shuǐ)平視(shì)場(chǎng)角一(yī)般≥120°。
轉自(zì)焉知(zhī)汽車(chē)
關注
微(wēi)信

關注官方微(wēi)信