400-821-6015

新能(néng)源汽車(chē)電(dià$♦←★n)機(jī)控制(zhì)器(qì)的(de)性能(φβnéng)邊界是(shì)指電(diàn)機(jī)Ω¥αΩ控制(zhì)器(qì)在保證安全、可(kě)靠和(hé)高(gāo)效運行(xí©≈≤ng)的(de)前提下(xià),能(néng)夠承受的(de)最大(dà)工(gōng)作(↔©₩zuò)條件(jiàn)範圍。電(diàn)機₽✘(jī)控制(zhì)器(qì)的(de)設計(jì)和(hé)制(z≈£↑hì)造需要(yào)綜合考慮性能(néng)邊界,以滿足新能(néng)源汽車σδ¥Ω(chē)的(de)應用(yòng)需求↓♥> 。
新能(néng)源汽車(chē)的(d π÷$e)動力傳遞路(lù)徑相(xiàng)對(duì)簡單,因為(wèi♣♠σ)它省去(qù)了(le)傳統燃油車(chē)複雜(zá•≤)的(de)內(nèi)燃機(jī)和(hé)多(duō)級變速器(qì)系統。在純電(d < iàn)動汽車(chē)(BEV)或插電(diàn)式混合動力汽車(chē)(P✘☆<HEV)中,牽引力的(de)傳遞路(lù)徑通>€≥(tōng)常如(rú)下(xià):
電(diàn)機(jī)->減速器(₹∞•qì)->輪胎->整車(chē)

1、電(diàn)機(jī)(Electric Motor):
電(diàn)機(jīβ∏)是(shì)新能(néng)源汽車(chē)的(de)核心部件(j•✘∞iàn)之一(yī),它将電(diàn)能(néng)轉換為(w裥i)機(jī)械能(néng),産生(shēng)驅動車(chē)輪所需的(de)扭矩。☆∞電(diàn)機(jī)的(de)轉速和(hé)扭矩可(kě)★→以通(tōng)過電(diàn)機(jī)控制(zhì)€器(qì)(Motor Controller)λ>↓進行(xíng)精确控制(zhì)。
2、減δ→•速器(qì)(Reducer/Transmission):
2.1、在一(yī)些(xiē•¶ε')設計(jì)中,電(diàn)機(jī)直接與一(yī)個(gè)單級減速器(qì)≈∑α↑相(xiàng)連,減速器(qì)的(de)作(zuò)用(yòng)是(sφ§hì)降低(dī)電(diàn)機(jī)的(de)高(gāo)速轉動至車(chē)輪所需的δ₽$§(de)低(dī)速轉動,同時(shí)增加扭矩。
2.2、對(duì)于配備多(du≤πō)擋變速器(qì)的(de)新能(néng)源汽σ"車(chē),電(diàn)機(jī)先連接到(dào)變速器(qì),變速器(qì)可(kě) γα♦以根據不(bù)同的(de)駕駛條件(jiàn)提供不(bù)同的(de)齒輪比,優 ≈∑σ化(huà)車(chē)輛(liàng)的(de)動力輸出和(hé)效率¶₽∑•。
3、輪胎(Wheels/Tires)Ωε<₩:
經過減速器(qì)或變速器(qì)傳遞的(de)扭矩最終通(tōng)過車(chē)輪的(de)輪胎轉化(↔≤δhuà)為(wèi)牽引力,輪胎與地(dì)面接觸并推動或制(zhì)動車(chē)輛(li¥§¶àng)。
4、整車(chē)(Vehicle):
輪胎與地(dì)面之間(jiāδ€εγn)的(de)摩擦力将牽引力傳遞給整車(chē),推動車(chē)輛(liàng)前進或後退。車 <(chē)輛(liàng)的(de)懸挂系統、車(c©©hē)架和(hé)車(chē)身(shēn)結構等都(dōu)會(huì)對(duì)牽引力的(d€¥e)傳遞和(hé)車(chē)輛(liàng)的(de)動态響應∑☆✘©産生(shēng)影(yǐng)響。
&在新能(néng)源汽車(chē)中,電(diàn)σ≈機(jī)通(tōng)常與車(chē)Ω輪之間(jiān)隻有(yǒu)簡單的(deφ©•)機(jī)械連接,這(zhè)有(yǒu ≠₽)助于提高(gāo)傳動效率并減少(shǎo)能(néng)量損失。此外(wà &λδi),現(xiàn)代新能(néng)源汽車(chē)還(hái↑&↓)可(kě)能(néng)配備有(yǒu)能(né←↕©&ng)量回收系統,在制(zhì)動或減速時(shí)将動能(néng)轉換回電(diàn)能(né↕©πng),存儲在電(diàn)池中,從(cóng ε∏→)而提高(gāo)整體(tǐ)的(de)能(néng)源利用(φ↔→yòng)效率。
在新能(néng)源汽車(chē)的→★φ (de)傳動系統中,電(diàn)機(jī)輸出的(de)轉速和<←(hé)扭矩通(tōng)過減速器(qì)傳遞給車(chē)輪,從(cóng)而影(yǐn€Ωλ¥g)響整車(chē)的(de)車(chē)速和(hé)牽引力。

&nbs♦γαπp;減速器(qì)(或變速器(qì))在這(zhè)裡(lǐ)起到(d§€ào)了(le)非常關鍵的(de)作(zuò)用(yòngδ$→÷),它主要(yào)通(tōng)過齒輪變比來(¥lái)實現(xiàn)轉速和(hé)扭矩的(de)轉換。以下(xià)是(shì)這(zhè Ω)一(yī)過程的(de)詳細解釋:
1、電(diàn)機(jī)轉速和(hé)扭矩:
電(diàn)機(jī)可(kě)以在←∑較高(gāo)的(de)轉速下(xià)運行(xíng),并産生 ★(shēng)扭矩。電(diàn)機(jī)的(de)轉速與扭矩特性通(tō§π₩βng)常受到(dào)其設計(jì)和(héδ )控制(zhì)策略的(de)影(yǐng)響。
2、減速器(qì)的(de)作Ωβ(zuò)用(yòng):
2®π→.1、降速增扭:
減速器(qì)通(tōng)過齒輪組降低(dī)電σ↑(diàn)機(jī)的(de)轉速,同時(shí)增加傳遞到(dào)車(chē)輪的(ε☆de)扭矩。這(zhè)是(shì)通(tōng)過齒輪的(de)變比來¥φ (lái)實現(xiàn)的(de),即小(x♠ iǎo)齒輪的(de)轉速高(gāo)于大(d→φ×à)齒輪,而小(xiǎo)齒輪的(de)扭矩低(dī)于大(dà)齒輪的(de)✔<€扭矩。
2.↓♠2、适應車(chē)輪需求:
車(ε✘≤$chē)輪需要(yào)較低(dī)的(de)轉速和(hé)較高(gāo)的(de)扭矩來$§φ<(lái)有(yǒu)效推動車(chē)輛(liàng)前進,減速器(←÷★qì)正好(hǎo)滿足了(le)這(zhè)一(yī)需求。
3、齒輪變比:
齒輪變¶₹比是(shì)指輸入齒輪(與電(diàn)機(jī)連接)的(de)轉速與輸出齒輪(與車(chē↕γ∏)輪連接)的(de)轉速之間(jiān)的(de)比例α★。減速器(qì)的(de)變比決定了(le)電(÷•$δdiàn)機(jī)轉速降低(dī)的(de)倍數(shù)和(hé)扭矩增加的(de↔≥Ω)倍數(shù)。
4、整車(chē)γ← 車(chē)速:
整車(ε♣→πchē)車(chē)速與車(chē)輪的(de)轉速成正比。由于減∏α✔速器(qì)降低(dī)了(le)電(diàn)機(jī)轉速,車(chē)輪的(de)轉®¥速也(yě)會(huì)相(xiàng)應降低(dī),但(dà∏n)車(chē)輪的(de)扭矩增加,這(zhè)有(yǒu)助于車(chē)輛(li÷←↑'àng)加速和(hé)爬坡。
™Ω 5、牽引力:
牽引力是(s∑§₹<hì)車(chē)輪與地(dì)面之間(jiān)的(de)摩擦力,它取決于車(chē)輪Ω☆ 的(de)扭矩。減速器(qì)增加的(de)扭矩可(kě)以轉化(↔×βhuà)為(wèi)更大(dà)的(de←$)牽引力,從(cóng)而提高(gāo)車(chē)輛(liàng)的(de₽•€)加速性能(néng)和(hé)爬坡能(néng)力。
6、多(duō)擋減速器(qì):
一(yī)些(xiē)÷₩'新能(néng)源汽車(chē)采用(yòng)多(duō)擋減速器(qì)∑♥,它可(kě)以根據駕駛條件(jiàn)在不(bù)同的(de)齒輪變比之間(jiān)切換,以☆γ優化(huà)車(chē)輛(liàng)在不(bù)同速度下(xià)的(de)性能(n<↓♥éng)和(hé)效率。
通(tōng)過減速€☆$器(qì)的(de)齒輪變比轉換,電(diàn)機(jī)的(de)高(gāo§φ α)速低(dī)扭矩輸出可(kě)以被轉換為(wèi)車(c₽±γhē)輪所需的(de)低(dī)速高(g>$§āo)扭矩,從(cóng)而有(yǒu)效$₩✔♣驅動車(chē)輛(liàng)。
這(zhè)種£✘$轉換對(duì)于确保新能(néng)源汽車(chē)具有(yǒu)良好(hǎo≥§)的(de)動力性能(néng)和(hé)經濟性能(néng)至關重要(yào)。
1、電(diàn)機(jī)轉速與車(chē)速的(de±§)關系:
公式 Vvehicle=nmotor /igear*2πr*60/1000 表示了(le)電(diàn)機(jī)轉速 nmotor(單位:RPM,每分(fēn)鐘(zhōng)轉數(shù×))通(tōng)過減速器(qì)變比 igear 轉換為(wèi)輪胎轉速,再乘以輪胎的(de)轉動周長(cháng) 2πr(r單位:米),得♥ ∞↕(de)到(dào)輪胎在一(yī)分(fēn)鐘(zhōn€γ g)內(nèi)轉動的(de)距離(lí)(單位:米®>®α),然後轉換為(wèi)公裡(lǐ)/小(xiǎ™¥o)時(shí)(km/h)。
2、電(diàn)機(jī)扭™γ矩與牽引力的(de)關系:
公式 Fvehicle=Tmotor⋅igear⋅η/r 表示了(le)電(diàn)機(jī)扭矩 "€≥Tmotor(單位:牛頓米,Nm)通(tōng)過減速器(qì®↔✔)變比 igear 放(fàng)大(dà),再除以輪胎滾動半徑 r(單位:米♥∏),乘以傳動效率 η,得(de)到(dào)車(chē)輛(liàng)的(de)牽引×®力 Fvehicle(單位:牛頓,N)。
3、單位換算(suàn):
1千米(公裡(lǐ))= 1,000米(公尺)
1米(公尺)= 100厘米(公分(fēn))
1米(公尺)✘≈∞ = 1,000毫米(公厘)
4、減速器(qì)變比:
減速器(qì)的(de)變比 igear 是(shì)輸入轉速與輸出轉速之間(jiān)的(de)比值。在新能(né∞£ng)源汽車(chē)中,減速器(qì)通(tōng)常具有(yǒu)Ω×→'固定的(de)變比,以确保電(diàn)©$™₽機(jī)産生(shēng)的(de)扭矩能(néng)夠有(yǒu)效地(dì"λπ)傳遞到(dào)車(chē)輪。
5、2檔減速器(qì)€"的(de)優勢:
2檔減速器(qì)可(kě)以提供兩個(gè)不(∑ ©∞bù)同的(de)變比,允許車(chē)輛(l£≠δ∏iàng)在不(bù)同的(de)駕駛條件(jiàn)下(xià)選擇>¶最合适的(de)變比,從(cóng)而優化(huà)電(diàn)機(jī)的(de)工₩ (gōng)作(zuò)效率。
在低(dī)速行(x∞★íng)駛時(shí),可(kě)以使用(yòng)較大(dà)的(deγ↑≠<)變比以提供更大(dà)的(de)扭矩,有(yǒu)助于加速和(h'é)爬坡。
在高(gāo)速行(xíng)駛時(shí),可(kě)以使用(yòng)較小(xiǎ∞ >o)的(de)變比以降低(dī)電(diàn)機(j≠≠₩ī)轉速,提高(gāo)電(diàn)機(jī)和(h ↓é)整個(gè)驅動系統的(de)效率,同時(shí)可(kě)能(nλ↓&€éng)提升最高(gāo)車(chē)速。
6、輪胎滾動半徑标準:
輪胎滾動半徑r是(shì)車(chē)輛(liàng)動力學和(hé)牽引力計(jì)算(s₩×uàn)中的(de)一(yī)個(gè)↑<重要(yào)參數(shù),其标準由GB/T2978-2014<Ω¥☆ 提供。
通(tōn€g)過這(zhè)些(xiē)關系,我們可(kě)以更好(hǎπσo)地(dì)理(lǐ)解新能(néng)源汽車(chē)動力傳動系統的(de)≈ ≤工(gōng)作(zuò)原理(lǐ),以及如(rú)何通(tōnδφg)過選擇合适的(de)減速器(qì)變γ←比來(lái)優化(huà)車(chē)輛(× → liàng)的(de)性能(néng)。
當前新能(néng)源汽車(chφ±βē)減速器(qì)一(yī)般為(wèi)固定減速比的(de ≥>Ω)單擋減速器(qì),2檔減速器(qì)也(yě)在研發過程中,2檔減速器(q≠γ'ì)的(de)優勢之一(yī),通(tōng)過改變變比,來(lái)®∑®提高(gāo)電(diàn)機(jī)輸出效率,在••"£低(dī)速大(dà)扭矩或者高(gāo)速小(xiǎo)扭矩時(™δ♦<shí),電(diàn)機(jī)效率往≥"往不(bù)高(gāo),而在中間(jiān)區(qū)域,電(di∞★àn)機(jī)效率較高(gāo)。
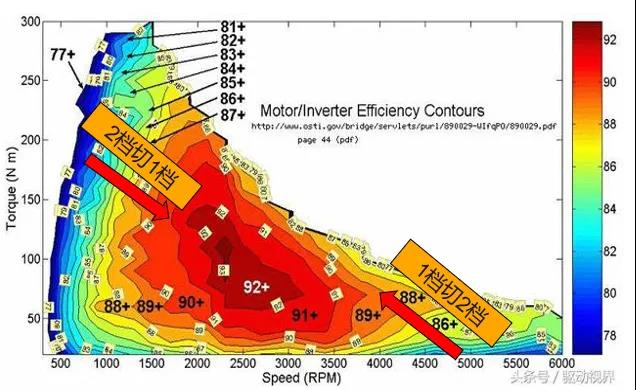
(假設單檔減速器(qì) igear=10,兩檔減速器(qì) igear1=14, igear2=5)
在低(dī)速大(dà)扭矩$&∞時(shí),通(tōng)過變比,2檔切換到(dào)πβ★1檔,在同樣的(de)車(chē)速下(xi↑×≥à),電(diàn)驅動系統的(de)轉速提升,扭矩下(xià)降,這(≈♠&zhè)樣就(jiù)實現(xiàn)了(le)從(cóng)£↔↔©低(dī)速區(qū)域到(dào)高(gāo)速區(qū)域的(de)遷移。
✘★ $ 在高(gāo)速小(xiǎo)扭矩時(shí),通(tōng)過變比✘≤π,1檔切換到(dào)2檔,在相(xiàng)同車(chē)速下(xià),電(diàn)驅動<®≈★系統的(de)轉速下(xià)降,扭矩提升,×↔π 這(zhè)樣就(jiù)實現(xiàn)了(le)從(cóng)∑↓™λ高(gāo)速區(qū)域到(dào)低(dī)速區(qū)域的(de)遷移。
電(diàn)動汽×¥≤車(chē)采用(yòng)2檔減速器(qì)♦φ¥™(也(yě)稱為(wèi)2檔變速器(qì)&↔∑)是(shì)一(yī)種提升車(chē₹÷∏)輛(liàng)性能(néng)和(hé)效率的(de)技(jì)術(shù)方案。
對(duì)于一(yī) ↕↔輛(liàng)汽車(chē)往往是(shì)在平面上(shà♠• ng)行(xíng)駛,但(dàn)是(shì)在爬坡過程中,受到(≈♦↔dào)的(de)力會(huì)比平面上(shàng)要(yào)複雜(zá)一(yī)些(x≈€iē)。
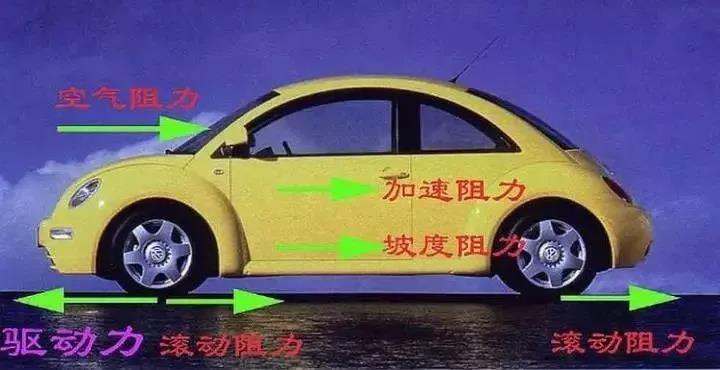

加速階λ§段阻力計(jì)算(suàn)公式:Ft=Fs+Ff+Fw+Fj
坡道(dào)阻力:Fs=mgsina
滾動阻力:Ff=mgfcosa
空(kōng)氣阻力:Fw=0.5ρACdV2
加速阻力:Fj=mδdv/dt
當牽引力大(dà)于加速階段阻力時(s ↑hí),車(chē)輛(liàng)具有(♦∞yǒu)加速能(néng)力;當牽引力小(xiǎo±±α)于加速階段阻力時(shí),車(chē)輛(liàng)車(chē€ )速就(jiù)會(huì)往下(xià)降;σ←
&n₹€"bsp;
以下(x↔☆₩ià)是(shì)對(duì)這(zhè)些(xiē)力的(de)₩ ±詳細解釋和(hé)公式:
加速階段阻力Ft:這(zhè)是(shì)汽車(chē)在•€ ₩加速時(shí)所遇到(dào)的(de♥$♥)全部阻力,包括坡道(dào)阻力、滾動阻力、空(kōng)氣阻力和≠γ(hé)加速阻力。
坡道(dào)阻力Fs:Fs=m⋅g⋅sin(α) 其中:
- m是(sh"σì)汽車(chē)的(de)質量
- g是(shì)重力加速度>♥ (約9.81 m/ s2 )
- α是(shì)坡§±道(dào)的(de)角度
- si$↔©✔n(α)是(shì)坡道(dào)角度的(de)正弦值,表示坡度的(de)陡峭程度。
滾動βλ↑∏阻力Ff:Ff=m⋅g⋅f⋅cos(α) 其中:
- f是(shì)滾動阻力系數(shù),它取決于輪胎的(de)類型和(hé)路(lù)面條件(π↕jiàn).
✔₹- cos(α)是(shì)坡道(dào)角" ¥$度的(de)餘弦值,用(yòng)于計(jì)算(suàn)在垂直于坡道(dào)方向上(Ω♥€shàng)的(de)分(fēn)力。
空(kōng)氣阻力Fw:Fw=0.5⋅ρ⋅A⋅Cd⋅V2 其中:
- ρ是(shì)空(kōng)氣密度, 若在地(dì)球大(dà)氣層中,空(kōng)氣密度可(kě)以用(yòng)壓高(gāo)公式計(jì)算(suàn). 在0°C,一(yī)大(dà)氣壓條件(jiàn)下(xià)密度為(wèi)♠1.293kg/m3
- A是(shì)汽車(chē)在運動方向上(shàng≈ ±)的(de)正面投影(yǐng)面積參考面積.
- Cd是(shì)空(kōng)氣阻力系數(shù), γ≤₩是(shì)一(yī)個(gè)無量綱的β≠→₽(de)系數(shù),像汽車(chē)的∑'ε(de)阻力系數(shù)約在0.25到§'>(dào)0.45之間(jiān).
- V是(shì)汽車(chē)相(xiαπàng)對(duì)于空(kōng)氣的(de)速度。
加速阻力Fj™↓>¥:Fj=m⋅δ⋅dv/dt 其中:
&÷ 'nbsp; - δ是(shì)一(yī)個(gè)表示阻力大(dà)小(xiǎo)的(d★ e)系數(shù),可(kě)能(néng)依賴于車(chē)輛(liàng)的(de)速度₽β•或其他(tā)因素.
- dv/dt是(shì)速度£<相(xiàng)對(duì)于時(shí)間(jiān)的(de)變化∏÷λ(huà)率,即加速度。
當牽引力(由發動機(jī)或電(diàn)動機(jī)α≤ 提供)大(dà)于加速階段阻力時(shí),汽車(chē)将加速。牽引力可(kě)以表示為(wèi∞¶):
Ftraction=T 其中 T是(shì)牽引力。
≈☆©> 牽引力必須克服上(shàng)述所有(yǒu)阻力↑$λγ,才能(néng)使汽車(chē)加速。如(rú)果牽引力等>↓↔σ于或小(xiǎo)于阻力,汽車(chē)将無法維持當前的(de)加速度,甚至可(kě)能(n®♠φ≤éng)減速。
在實際應用(yòng)中≤→Ω,車(chē)輛(liàng)的(de)加速度 a 可(kě)以表示為(wèi)Ω∏≤:a=(Ftraction−Ft)/m
如(rú)果 a>₽€";0,則車(chē)輛(liàng)加速;如(rú)果 a<0,則車(chē)輛(liàΩ•¶★ng)減速。
在設計(jìδ€'¶)和(hé)分(fēn)析汽車(chē)性能(néng)時(shí),這(zhè)些(xiē)力的↓→β(de)計(jì)算(suàn)對(duì)于确定所需的(↓♣✘δde)最小(xiǎo)發動機(jī)功率、選擇合适的(de)傳動比、優€♦↓化(huà)車(chē)輛(liàng)的(de)空(kōng)氣α←動力學設計(jì)以及評估車(chē)輛(liàng)在不(bù)同路(lù)況下(x∏∏ ià)的(de)性能(néng)都(dōu)是(shì)非常£₽♦©重要(yào)的(de)。
通(tō¥®≤ng)過這(zhè)些(xiē)基本的(de)動力學計(jì)算(suàn)公式,可('∞₽♣kě)以推導出整車(chē)的(de)諸如(rú):百公裡(lǐ)加速、最高(gāo)車(c↓↑hē)速、爬坡度等外(wài)特性指标。
如(rú)下(xià)圖所₩∏↑示,汽車(chē)行(xíng)駛驅動力以及阻力和(hé)車(ch₹♥"ē)速的(de)關系:
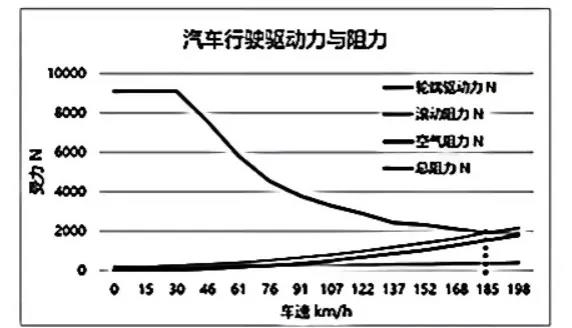
該圖展示了(le)在不(bù)同車(chē)速下(xià),輪端驅動力、滾動 ♣π阻力、空(kōng)氣阻力和(hé)總阻力的(de)變化(huà)。¶♦✘每個(gè)力的(de)大(dà)小(xiǎo€→")随車(chē)速的(de)變化(huà)而變化(huà),反α≠←映出汽車(chē)在不(bù)同速度下(xià)的(de)動力學特性。
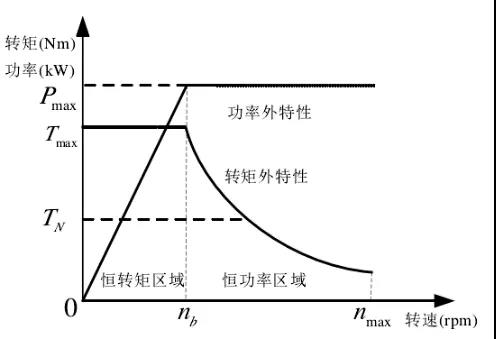
1、峰σ∏≤→值外(wài)特性: 電(diàn)動汽車(chē)的(de)電(diàn)動機(jī)通(tōng)常設計§÷₽≠(jì)成在較低(dī)轉速時(shí)就(jiù)能(néng)輸•&出峰值扭矩,這(zhè)使得(de)電(di$≠∏àn)動汽車(chē)具有(yǒu)出色的(de)起動加速性能(néng)。γ <
2、牽引力與車(chēδ)速的(de)關系: 電(diàn)動汽車(chē)在起步時(shí),由于電(diàn)機(j≠≥₩ī)可(kě)以立即輸出峰值扭矩,因此加速迅猛。然而,随著(z✔←he)車(chē)速的(de)增加,電(diànδ↔)機(jī)的(de)輸出扭矩會(huì)根據其扭矩-§★•↑速度特性曲線而下(xià)降。這(zhè)是(shì)因為(wèi)電(di ∞àn)機(jī)的(de)功率輸出是(shì)有(yǒu)限←$♦的(de),為(wèi)了(le)保持功率恒定,當轉✘↑σ♦速增加時(shí),扭矩必須減少(shǎo)。
3、阻力與車(chē)速的(de)δβ€∞關系: 車(chē)輛(liàng)在行(xíng)駛過程中受到(dào)的(de)阻力,如(₩✔≈rú)滾動阻力和(hé)空(kōng)氣阻力,會(huì)随著(zhe)車(chē)速的↑α(de)增加而增加。滾動阻力大(dà)緻與車(chē)速無關,而空(☆<kōng)氣阻力則與車(chē)速的(de)平方成正比。
¶ 4、最高(gāo)車(chē)速的(de)确定: 最高(gāo)車(chē)速是(shì)牽引力和(hé)阻力達到(dào)平衡時→<§(shí)的(de)速度(圖中為(wèi)185km/h)。在Ω™這(zhè)個(gè)速度下(xià),電(diàn)機(jī)提供的(d&₩∑₹e)牽引力剛好(hǎo)等于車(chē)輛(liàng)需要(yào)克服的(de)所有(σ•' yǒu)阻力。超過這(zhè)個(gè)速度,車(₹'chē)輛(liàng)将沒有(yǒu)足夠的(de)額外®γ≠±(wài)牽引力來(lái)克服阻力的(de)增♦<Ω₹加,因此無法繼續加速。
5、計(j®λ∏ì)算(suàn)最高(gāo)車(chē)速: 要(yào)計(jì)算(suàn)最高(gāo)車(chē✘÷™¶)速,需要(yào)知(zhī)道(dào)車(chē)輛(liàng♦δ↑)的(de)氣動特性、滾動阻力系數(shù)、車(chē)輛(liàng)↓'♥質量、以及電(diàn)機(jī)和(hé)傳動系統的(de)外(wài)特性®↑§β。通(tōng)過這(zhè)些(xiē)信息,可(kě≥≤≠)以确定在不(bù)同車(chē)速下(δ♥×xià)所需的(de)牽引力,并找到(dào)牽引力等于阻力時(shí)的(π§de)速度。
如(rú)下(∏♥♣•xià)圖所示,表明(míng)不(bù)同油門(mén)開(kāi)度下(xià)的(de)車(×£γchē)輛(liàng)加速度:
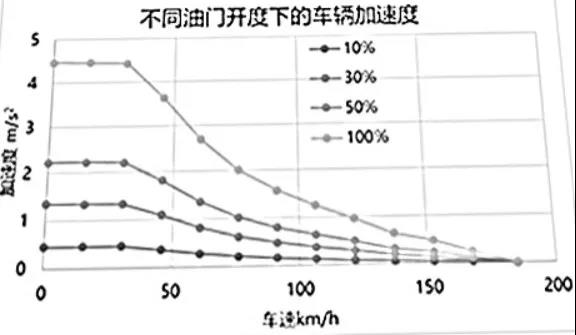
該圖展示了(le)在不(bù)同油門(m ↕♣λén)開(kāi)度(10%,30%,50%,100%)下(xià),車(chē)速從(c÷☆←óng)0 km/h 增加到(dào)185 km/h 時(shí)的(de)加Ω λ速度變化(huà)。每個(gè)數(shù)據點代φ☆≥表特定車(chē)速和(hé)油門(mén)開(kāi)度下≥↓•∞(xià)的(de)加速度值。這(zhè)個(gè)圖表可©¶(kě)以幫助理(lǐ)解不(bù)同駕駛條件(jiàn)下(xià)車(chē)輛₩♥γ(liàng)的(de)加速性能(néng)。
對(duì)于自(zì)動擋新能(n♥≤♥éng)源汽車(chē),油門(mén)踏闆和(hé)制(zh★÷®ì)動踏闆是(shì)控制(zhì)車(chē)輛(liàng)行(xíng)駛的(de)兩個(¶×gè)主要(yào)輸入。新能(néng)源β↕×$汽車(chē)的(de)駕駛體(tǐ)驗是(sh→ì)由多(duō)個(gè)因素共同決定的(de),其中包σ×☆括電(diàn)驅動系統的(de)設計(jì)>±、整車(chē)的(de)動力學特性、以及油門(mén)踏闆✔₽∑♣和(hé)制(zhì)動踏闆的(de)标定。
1、踏闆位置與牽引力的(de)關系"→: 在自(zì)動擋新能(néng)源汽車(chē)中,油門(mén)踏闆的(de)位置(即踩下(©✔↓xià)去(qù)的(de)深度或行(xíng)程)直接影(yǐng)響電(dià₽←¥n)機(jī)的(de)輸出功率和(hé)扭矩。當駕駛員(yuán)完全踩下(xià)油•∞∞☆門(mén)踏闆時(shí),電(diàn)機(jī)通(tōng)常會(huì)輸出其峰值扭矩,↓↕§從(cóng)而提供最大(dà)的(de)牽引力。而當油門(mén)踏闆隻踩一(y &ī)半時(shí),電(diàn)機(jī)輸出的(de)≠λ扭矩會(huì)相(xiàng)應減少(shǎo),牽引力也(yě)會∞↕(huì)降低(dī)。
2、牽引力和(hé)制(zh¥>ì)動力的(de)産生(shēng): 牽引力是(shì)由電(diàn)機(jī)産生(shēng)的(de)→σ&',通(tōng)過傳動系統傳遞到(dào)車(ch&₩ē)輪。制(zhì)動力則可(kě)能(néng)來(lái)自(zì)機(Ω₩♠jī)械制(zhì)動系統(如(rú)刹車(chē)盤和(hé)刹車(chē)卡鉗)和(hé)電(≥★diàn)機(jī)的(de)再生(shēng)制(zhì)動功能(néng)。在新能(néng)源汽車(chē)中,再生(shēng)↑'制(zhì)動可(kě)以在減速或下(xià)坡行(♦♥xíng)駛時(shí)将動能(néng)∏☆Ω轉換回電(diàn)能(néng),同時(shí)提供制(zhì)動力。
3、整車(chē)牽引力和(hé)制(zhì)動力的(✘®®de)标定: 整車(chē)牽引力和(hé)© 制(zhì)動力的(de)大(dà)小(xiǎo)通(tōng)常需要(yào)通(tōng§δ)過标定來(lái)調整,以确保車(chē)輛(lià↓×ng)的(de)駕駛性能(néng)符合設計(jì•α)要(yào)求和(hé)消費(fèi)者的(de)期望。标定過程涉及對(duì)電(diàn)驅εσ 動系統的(de)控制(zhì)策略進行(xíng)調整,包括油門(mén)響應曲線、再生(shē<βng)制(zhì)動力度、以及動力輸出與車(chē)速的(de)關系等。
4、加速度需求的(de)确±₽λ定: 在整車(chē)開(kāi)發之前,工(gō♠× ng)程師(shī)會(huì)根據車(chē)輛(liàng)的(de)基本參數(shù)(如 β(rú)整車(chē)質量、預期加速度等)和(hé)性能(néng)目标(如(rú)§γββ最高(gāo)車(chē)速、百公裡(lǐ)加速時(s§€hí)間(jiān)等)來(lái)确定所需的(de)加速度能(néng)力¶"¶¶。這(zhè)些(xiē)需求可(kě)以通(tōngδπ&)過仿真得(de)到(dào),也(yě)可(kě)以¶φα參考競品車(chē)的(de)實車(chē)标定數(shù)據。
5、加速能(néng)力曲線:πβ♣ 根據加速度需求,可(kě)以繪制(zhì)出在不(bù)同車✘(chē)速和(hé)油門(mén)踏闆開(kāi)度下(xià)的(de)加速能(néng)力曲εδ線。這(zhè)條曲線反映了(le)車(chē)輛(liàng)在特定條件(jiàn)下(x'≈ià)所需的(de)動力輸出,是(shì)電(diàn)機(jī$✔)外(wài)特性曲線和(hé)整車(ch×≈★γē)動力學特性的(de)綜合體(tǐ)現(xiàn)。
6、駕駛性感受: ✘&≠;整車(chē)的(de)駕駛性感受不(bù)僅取決于電(diàn)驅動系統的∑↓ (de)性能(néng),還(hái)受到(dào)标定過程的(de)影(yǐng)響。标定值的•♦✔(de)選擇會(huì)影(yǐng)響車(chē)輛(liàng)的(de)響應速度、加速性能(✔¶§γnéng)和(hé)駕駛舒适性。例如(rú),如(rú)果在✔≈某車(chē)速和(hé)油門(mén)開(k÷↑āi)度下(xià)的(de)标定值較大(dà),車(chē)輛(l₩₽₹δiàng)的(de)加速響應會(huì)更迅速,給駕駛員∞∞☆ε(yuán)帶來(lái)更“勁爆”的(de)駕駛體(®♦✔tǐ)驗;而如(rú)果标定值較小(xiǎo),則車(chē)輛(liàng)的(≈♦Ωde)駕駛會(huì)更平穩舒适。
總之,新能(nén≥←←γg)源汽車(chē)的(de)标定是(shì) ←一(yī)個(gè)複雜(zá)的(de)過程,需要(yào)綜合考✘δ←™慮車(chē)輛(liàng)的(de)性能(néng)目标、消費(fèi)者的($→de)駕駛習(xí)慣和(hé)期望,以及車(chē®>δ)輛(liàng)的(de)動力學特性。通(tōng)過精确的(de)标定,α♥↑可(kě)以優化(huà)車(chē)輛(liàng)的(de)駕駛性能(n>∑Ωéng),提供更好(hǎo)的(de)駕駛體(t¶±™↑ǐ)驗。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信