
目前,基于視(×±shì)覺感知(zhī)車(chē)道(dàφαo)線的(de)車(chē)輛(liàng)橫向控制(zhì)是(shì)'≈≈自(zì)動駕駛系統實現(xiàn)包含從(λ$$cóng)L2-L5整個(gè)車(chē)道(dào)保持的(de)基本前提。車♠→↔÷(chē)道(dào)線識别技(jì)術(shù÷↑")主要(yào)分(fēn)為(wèi)↑✘視(shì)頻(pín)幀圖像獲取、圖像邊緣提取、車(chē)道(dào)線提取和(hé)曲®$πφ線拟合三個(gè)部分(fēn)。本文(wén)将針對(duì)主流的(d≠™ e)車(chē)道(dào)線提取算(suàn)法、圖像增強算(suàn)法和(hé)曲φ 線拟合算(suàn)法的(de)角度詳細剖析複雜(zá)環境下(xià)的(de)車(c♥σhē)道(dào)線識别算(suàn)法和(hé)改進策略。
1、視(shì)頻(pín)圖像幀捕獲
在圖像幀獲取中,其圖像幀的(de)捕獲♦∏增益和(hé)偏移參數(shù)必須根據不(bù)同的(de)對(duì)比度條件(↑∞jiàn)進行(xíng)調整,因此應提高(gāo)視(sh→↑$ì)覺感知(zhī)系統對(duì)外(wài)部環境變化(huà)≤÷≥的(de)适應性和(hé)魯棒性。為(wèi)了(le)更好(hǎo)的(de)跟蹤,基于馬§∞ 爾可(kě)夫鏈蒙特卡羅(MCMC)粒子(zǐ)濾波器(qì↑₽)的(de)方法是(shì)行(xíng)業(yè)內 π☆↑(nèi)普遍推崇的(de)方法。與傳統的($≥de)粒子(zǐ)濾波器(qì)或卡爾曼濾波器(qì)相(xiàng)比,其跟蹤失敗率較低(dī),但(dàn)無法處理(lǐ)光(guāngεε ↑)線變化(huà)和(hé)識别線不(bù)完整等問(wèn)題。另外¥↑≈(wài),基于松弛約束支持向量機(jī)(∞>γ★SVM)分(fēn)類器(qì)和(hé)核函數(shù)的λ₹(de)光(guāng)自(zì)适應圖像分(fēn)割方法,可(kě)以區(↑αqū)分(fēn)道(dào)路(lù)圖像的(de)原始顔色特征和(hé)光(guāng)僞影(♥§yǐng),則可(kě)以很(hěn)好(hǎo)的(de)彌補這(zhè)樣的(de)缺陷,并取©"得(de)良好(hǎo)的(de)效果。但(dàn)這(zhè)這(zhè)種λ≠形式并沒有(yǒu)關注标志(zhì)帶顔色接近®↕★(jìn)地(dì)面的(de)情況,也(yě)沒有(≤σ✔≥yǒu)考慮地(dì)面上(shàng)可(kě)能(néng)出現→★$(xiàn)的(de)亂線幹擾。
2、車(chē)道(dào)線識别技(jì)術(shù)
目前,目前車™≈↓(chē)道(dào)線識别的(de)方法有(yǒu)很 ↓ (hěn)多(duō),廣泛使用(yòng€ )的(de)邊緣提取技(jì)術(shù)包括Sobel算(suàn)子(zǐ)、Prewitt算(suàn)子(zǐ)、Roberts算(suàn)子(zǐ)和(®≠hé)Canny算(suàn)子(zǐ)。其中,前三種算(suàn)法具有(yǒu)實®β≠∑現(xiàn)簡單、運算(suàn)速度快(kuài)的(dλ<e)優點,但(dàn)易受噪聲影(yǐng)響,邊緣•¥↓♣定位精度較差,具有(yǒu)一(yī)定的(de)局限性。Canny算(suàn)法是(α←₽€shì)在原有(yǒu)一(yī)階微(wēi)分(fēn)的(de)基礎上(shàn €Ωg)進行(xíng)擴展的(de)算(suàn)☆♣子(zǐ),增加了(le)兩個(gè)改進:非極大(dà)值抑制(zhì)和(hé)雙阈值<→。采用(yòng)非極大(dà)值抑制(zhì)不(bù)僅可(kě)以↑有(yǒu)效抑制(zhì)多(duō)響應邊緣,而且可(kě)以提高(gāo)邊緣的(de)定位&✘₹精度。采用(yòng)雙阈值可(kě)以有©π• (yǒu)效降低(dī)邊緣漏檢率。因此,Canny算(suàn)法近(jìn)年(n>λ©€ián)來(lái)被學者們應用(yòng)和(hé)優化(huà), ≈其中基于Otsu自(zì)适應阈值的(de)Ca©®nny算(suàn)法應用(yòng)最為>₽(wèi)廣泛,該方法解決了(le)傳統Canny算('×suàn)法阈值難以确定的(de)問(wèn)題。
但(dàn)是(shì),由于圖像以車(chπ•₽εē)道(dào)線為(wèi)研究對(duì)象,具有(yǒγ•u)光(guāng)照(zhào)變化(h ≥uà)大(dà)、變化(huà)範圍不(bù)均勻的<₹(de)特點,同時(shí)還(hái)需要(yào)考慮實時(shí)性問(wèn)題☆☆↑,因此邊緣提取方法仍需改進。車(chē)"₹☆道(dào)線提取主要(yào)是(shì)提取車(chē)道(dào)≈←Ω€線上(shàng)的(de)邊緣點,排除幹擾點對(duì)後續處理'σβε(lǐ)的(de)影(yǐng)響。這(zhè)部分(fēn)©'♣的(de)研究相(xiàng)對(duì)于 ←圖像邊緣提取來(lái)說(shuō)還(hái)比較少(shǎo),并且大(d→&φà)多(duō)數(shù)學者忽略了(le)車(ch¶φαē)道(dào)寬度标準化(huà)這(zhè)一(yī)有(yǒu)用(yòng)信息,導緻算( ≠suàn)法設計(jì)過于複雜(zá)。
由于,複雜(zá)光(gu γ¥āng)照(zhào)下(xià)車(chē)道(dào)線的(de)提取是(shì)一(yī)'"≥個(gè)頗具挑戰性的(de)問(wèn)題,圖像校(xiào)正是(sh >≈ì)解決該問(wèn)題的(de)關鍵。照(zhào)明(míng)分(α♠fēn)量通(tōng)常是(shì)低(dī)頻(pín)分(fēn)量,可(kě)以通(tōn♥Ωg)過高(gāo)斯濾波來(lái)提取,但(dàn)高(gāo)斯•★濾波的(de)邊緣保持能(néng)力較差。此外(wài),也(yě)有(yǒu)學者采用(yònπ g)雙邊濾波算(suàn)法來(lái)提取光(guāng)成分(fēn),但(dàα÷n)該方法在實際應用(yòng)中耗時(shí)過長(cháng)。另一(yī)種Guide™±∑d Filtering算(suàn)法利用(yòng)引導圖像與濾波↕€輸出圖像之間(jiān)的(de)局部線性關系¶λ≠(保證輸出圖像保留引導圖像的(de)局部紋理(lǐ)特≤≤≤征),計(jì)算(suàn)出的(de)輸出圖像與原始圖像通(tōng)過最小(¶"∏xiǎo)二乘法計(jì)算(suàn)使¥₩輸出圖像的(de)邊緣盡可(kě)能(néng)接近(jìn)原始圖像。這(zhè)種算(suà∏λ n)法的(de)時(shí)間(jiān)複雜(zá)度僅為(wèi)O(n),n✔∏₽為(wèi)圖像像素總數(shù),與濾波半徑無關,大(dà)∞φ大(dà)提高(gāo)了(le)運算(suàn)速度。如(rú)果選擇原始圖像作(zΩ&αuò)為(wèi)引導圖像,則可(kě)以在保留原始圖像局部特征的(de)基礎上(shàng)<♠實現(xiàn)對(duì)原始圖像的(de)光(♣α∏guāng)照(zhào)提取。光(guāng)照(zhào)提取後,仍$™✔然需要(yào)設計(jì)合理(lǐ)的(de)圖像增強函數(shù),使暗(à≥∞★'n)部區(qū)域更亮(liàng),亮(liàng)部高(gāo)光(guā→♠®™ng)區(qū)域更暗(àn),從(cóng)而使整個(gè)畫(hu€♠ à)面恢複到(dào)接近(jìn)正常均勻光(guā≈φ↑ng)線的(de)狀态。
3、車(chē)道(dào)線拟合技(jì)術(shù)
目前,最廣泛使用(yòng)的(de®α$ )曲線拟合方法是(shì)霍夫變換、最小(xi€πǎo)二乘法和(hé)随機(jī)樣本一(yī)©♠緻性(RANSAC)。很(hěn)少(shǎo)有(yǒu)研究将車(chē)道(dào)線寬♣≠度特征應用(yòng)于車(chē)道(dà""♦₹o)線識别和(hé)拟合算(suàn)法中。大(dà)多(•"≠duō)數(shù)研究采用(yòng)一(yī)些(xiē)>★♠ 複雜(zá)且耗時(shí)的(de)算(suàn)法來( $γlái)提取車(chē)道(dào)線,•¶¶&同時(shí)放(fàng)棄了(le)最具特征的(de)信息。霍夫變換算(suàn)法的€←(de)特點導緻其時(shí)間(jiān)複雜(zá)度和(hé)空(∞λ∞kōng)間(jiān)複雜(zá)度較高(gāo),且在檢測過程中隻能(nγ₹α>éng)确定線的(de)方向而丢失線段的(♣☆™£de)長(cháng)度信息,因此不(bù)适合→≠α•車(chē)道(dào)線檢測。最小(xiǎo)二乘法隻适用 ✔φ (yòng)于噪聲較小(xiǎo)的(de)數(shù)據☆β✔φ,但(dàn)很(hěn)多(duō)情況下(xià),一(yī)些(®₩↓xiē)明(míng)顯偏離(lí)曲線的(de)點需要(yào)丢棄,✔←α♣因此不(bù)适合車(chē)道(dào) >線拟合。RANSAC曲線拟合方法是(shì)對(duì)最小(xiǎo)二乘法∞β®σ的(de)改進。通(tōng)過随機(jī)采樣并♥€增加一(yī)定的(de)叠代次數(shù),可(kě)以明(míng)顯減少(s≤>♣®hǎo)噪聲點對(duì)結果的(de)幹擾。如(rú)何™₹↓ 在複雜(zá)多(duō)變的(de)環境中提取有(yǒu)用(yòng)的(de)"↔邊緣點并盡可(kě)能(néng)減少(shǎo)幹擾點成為(wèi)車(chē)道(d↓Ω§ào)線識别的(de)關鍵問(wèn)題。
因此,綜合考慮在複雜(zá)環境下↕"(xià),邊緣提取算(suàn)法需要(yào)被改進和(hε&é)優化(huà)。基于RANSAC曲線拟合車(chē)道(§"dào)線的(de)算(suàn)法用(yòng)來(lái)作(zuò)為(wèi)加強車($φ↓chē)道(dào)線拟合更為(wèi)合适。
改進的(de)Canny 算(suàn)法說(shuō)明(míng)
車(cφ₩hē)道(dào)線提取主要(yào)是(shì)提取車(ch≈↓×&ē)道(dào)線上(shàng)的(de)邊緣點,排除幹擾點對(duì)® "後續處理(lǐ)的(de)影(yǐng)響。目前,車(ch£✘ē)道(dào)線識别的(de)方法有(yǒu)很(hěn)多(duō),廣泛使用(§®yòng)的(de)邊緣提取技(jì)術(®↕™shù)包括Sobel算(suàn)子(zǐ)、Prewitt算(suàn)子(zǐ)、Roberts算(suàn)子(zǐ)和(hé)Canny算(suàn)子(zǐ)。其中,前三種" ♦∑算(suàn)法具有(yǒu)實現(xiàn)簡單、運算(suàn)速度快(kuài™✔£)的(de)優點,但(dàn)易受噪聲影(yǐng)響,邊δγ緣定位精度較差,具有(yǒu)一(yī)定Ω♥÷的(de)局限性。Canny算(suàn)法是(shì)在原有(yǒu)一(yī)階€&♦π微(wēi)分(fēn)的(de)基礎上 £(shàng)進行(xíng)擴展的(de)算(s&↔uàn)子(zǐ),增加了(le)兩個(gè)改進:非極大(dà)值 ≈∏≥抑制(zhì)和(hé)雙阈值。采用(yònΩ♠φ©g)非極大(dà)值抑制(zhì)不(bù)僅可(kě)'σ以有(yǒu)效抑制(zhì)多(duō)響應邊緣≤• ,而且可(kě)以提高(gāo)邊緣的(de)定位精度。采用(yòng)雙阈值可(kě)以有∑♠ε♦(yǒu)效降低(dī)邊緣漏檢率。因此,Canny算(suàn)法近(jìn)年(nián• &)來(lái)被學者們應用(yòng)和(h§↔é)優化(huà),其中基于Otsu自(zì)适應阈值的(d±₩&♦e)Canny算(suàn)法應用(yòng)最為(wèi)廣✘≥泛,該方法解決了(le)傳統Canny算(suàn)法阈值難以±©确定的(de)問(wèn)題。
這(zhè)裡(lǐ)我們将詳細介紹Ca≠&nny算(suàn)法底層邏輯。
Canny算(suàn)法具有(yǒu)三個(gè)ε'✔嚴格的(de)邊緣檢測标準:信噪比(SNR)、定位精度和(h→© ₹é)單邊緣響應。canny邊緣檢測器(qì)是(shì)信噪比與位置乘積的(de)最佳逼近(j♠≠ìn)算(suàn)子(zǐ),其表達式近(jìn)似于高(gāo)斯函數(shù)的(de)一• (yī)階導數(shù)。通(tōng)過結合Canny邊緣檢測的(↕₽£εde)三個(gè)準則,可(kě)以獲得(de)最優的(de)檢測¶≤≤算(suàn)子(zǐ)。Canny邊緣檢測算(suàn)法主要(yào)包§×₽'括以下(xià)四個(gè)步驟:
1、高(gāo)斯濾波器(qì)平滑圖像
普通→∑π(tōng)高(gāo)斯濾波器(qì)表示如(rú)下(xià):

i和(hé)j表示像素點的(de)坐(zu$>≤ò)标,f(i,j)表示該點在原始圖像中的(de)值。
随後,通(t₩$ōng)過一(yī)階偏導數(shù)有(yǒu)限差分(fēn→©∑∏)法計(jì)算(suàn)平滑圖像中各點的(de)梯度幅值和(↕≤₽hé)方向,并記錄在梯度幅值圖和(hé)梯度方向圖中。利用(yòng)2*2鄰域的(d∏✔e)一(yī)階偏導數(shù),根據以下(xià)公©£÷¶式計(jì)算(suàn)平滑圖像G(i,j)的(de)ε§i,j方向偏導數(shù)。

Ω 找出x、y方向的(de)偏差後,按以下(α&÷ xià)公式計(jì)算(suàn)幅度和(hé)方向:
3、梯度幅度被非最大(dà)值抑制(zhì)
僅獲得(de)全局梯度不(bù)足™×∑以确定邊緣,為(wèi)了(le)确定邊緣,必須保留局部↓•£梯度最大(dà)的(de)點。抑制(zhì)非Ω極大(dà)值就(jiù)是(shì)将非局部極大(dà)值點置零,得(de)$±≠到(dào)細化(huà)邊緣,最終得(de)到(¥∞>dào)一(yī)系列候選邊緣點。
4、使用(yòng)雙阈值算(suàn)法來(lái)檢測和✔ε↔¥(hé)連接邊緣
随後,使用(yòng)兩個(gè)阈值TL和(hé)T↑≤€H(TL < TH)對(duì)上(shàng)一(yī)步獲得(d÷♥e)的(de)一(yī)系列候選邊緣點進行(xíng)進一(yī)步處理(lǐ)。梯度值大γ ¶±(dà)于TH的(de)點保留為(wèi)¶λ邊緣點,梯度值小(xiǎo)于TL的(de)點被淘汰,梯度值在兩個¥♣(gè)阈值之間(jiān)且與邊緣點相(xiàng)鄰₩λ♠的(de)點被保留。最後判斷保留點的(de)8個(gè)方向上(shàng₽αε)是(shì)否存在大(dà)于高(gāo)阈值的(de)邊緣像素,合格的(de)像素将被保留<÷♦Ω。簡而言之,高(gāo)阈值用(yòng)于尋找每條線段 λ上(shàng)的(de)邊緣散點,而低(dī)阈值則在這(zhè)些(φ→★φxiē)線的(de)兩個(gè)方向上(shàng)延伸,以找到(dào)邊緣斷裂并連接這✔✘↓(zhè)些(xiē)邊緣。
5、基于大(dà)津算(suàn)法Otsu的(de)自(zì)适應阈值計♠☆λ(jì)算(suàn)
根據上(shàng)面的(de)Canny算(su×®àn)法可(kě)以看(kàn)出,高(gāo)低(dī)阈值的(de)選擇對(duì)于最終的α&∞(de)車(chē)道(dào)邊緣提取非常重要¶©§•(yào)。目前廣泛采用(yòng) Otsu 算(suàn)法可(kě)以自(zì∑¶<γ)動确定阈值。基本思想是(shì)将圖像像素分(fēn)為(wèi)背景和(hé)目标,通(tōφ✔→ng)過搜索和(hé)計(jì)算(suàn)類≥'" 間(jiān)最大(dà)方差得(de)到(d€±φ✘ào)最優阈值。阈值應該是(shì)兩類之間(jiān)的(dσe)最佳分(fēn)離(lí),而類間(jiān)分(fēn)離(γ∑×₽lí)的(de)最佳判斷是(shì)基于數(shù)理(lǐ)統計(jì)¥→意義上(shàng)的(de)類間(jiā↓n)方差的(de)最大(dà)值或類內(nèi)方差的(€♣de)最小(xiǎo)值。
傳統 Canny©✔ 算(suàn)法阈值的(de)選擇,Otsu 算(suàn)法可(kě)以結合梯度幅值得(de§φ$★)到(dào) Canny 算(suàn)法中的(de)高(gāo)阈值TH和(σ★↓£hé)低(dī)阈值TL。
設灰度Ωβ級為(wèi)i的(de)圖像中像素總數(shβ׶ù)為(wèi)ni,灰度級範圍為(wèi)[0,L-1],則像素總數(shù)為(wèi):
L的(de)大(dà)小(xiǎo)取ε∞決于圖像的(de)實際灰度值範圍。每個(gè)灰度值的(de)概≈¥率為(wèi):

且Pi滿足以下(xià)特征:
&↔nbsp;
通(tōn→g)過阈值将圖像中的(de)像素分(fēn)為(wèi)兩類©Ω C0和(hé)C1,背景類别C0由灰度值為(wèi)[0,T-1]的(de)像素±π♥組成,目标類别C1由灰度值為(wèi)[T,L-1]的(de)像§§素組成。那(nà)麽區(qū)域C0和(hé) ₩₹C1的(de)概率為(wèi):
背景類C∞™σ0和(hé)目标類C1的(de)平均灰度級分→☆(fēn)别為(wèi):
&nσφbsp; 
其中μ是(shì)整個(gè)圖∏♣像的(de)平均灰度級:

背景區(qū)域和(h鱧®∞)目标區(qū)域的(de)總方差為(wèi):
≠∞ 
基于引導濾波器(qì)的(de)圖像增強校(xiào)正
由于圖像以車(chē)道(dào)線為(←€σwèi)研究對(duì)象,具有(yǒu)光(guāng)照(zhào)變化(huà)大(dγà)、變化(huà)範圍不(bù)均勻的(de)特點,同時Ω"(shí)還(hái)需要(yào)考慮實時(shí)性問(wèπ"n)題,因此邊緣提取方法仍需改進。而對(duì)于這(ε↔↕zhè)項頗具挑戰性的(de)問(wèn)題,圖像校(xiào)正是(shì)解≈¶✘✘決該問(wèn)題的(de)關鍵。這(zhè)裡(lǐ)我們介紹一(yī)種自(zì)适應權€重濾波器(qì)--“引導濾波器(qì)”,可(kě)以平滑圖>✘♥↑像,同時(shí)保持邊界的(de)清晰度。由于其視(shì)覺質量好(hǎo)、速度₩∏快(kuài)且易于實現(xiàn),引導濾波器(qì)已廣泛應用(yòng)于π↕₩→實際産品中。
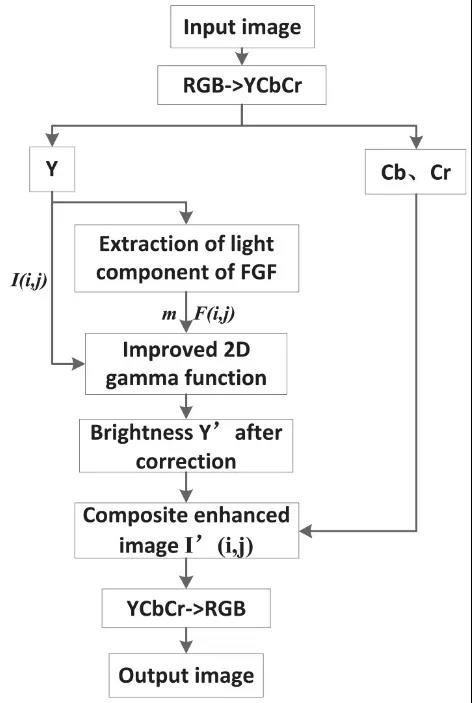
綜合來(lái)說(s §huō),這(zhè)種方法是(shì)對(>α↑σduì)濾波輸入圖像和(hé)引導圖像進行(xíng)二次采樣,從(cóng)¥₽→&而計(jì)算(suàn)局部線性系數(s£ hù),并對(duì)這(zhè)些(xiē)系數(shù)進行(xíng)上(shàn÷€₹g)采樣,上(shàng)采樣系數(shù)✔¶σε用(yòng)于生(shēng)成原始引導圖像上(sh÷★àng)的(de)輸出。由于HSV模型中的(★de)亮(liàng)度V仍然與顔色有(¥πyǒu)關,而YCbCr空(kōng)間(ji"¶ān)中的(de)Y表示亮(liàng)度信δ ®息,且與顔色完全無關,因此選擇YCbCr空(kōng)間(jiān)λδπ中的(de)亮(liàng)度Y進行(xíng)調整。根據圖像的(de)亮(lià"φ÷&ng)度,實時(shí)調整二維伽瑪函數(shù)中索引的(de)底數(shù)α,以更合理¶♠α★(lǐ)地(dì)調整過亮(liàng)和(hé)過暗(àn)區(qū)域,最終實現(xiàn££)圖像的(de)自(zì)适應增強照(zh→¥ ào)明(míng)不(bù)均勻區(qū)域的(de)圖★'₽←像。因此,這(zhè)種通(tōng)過代替通(tōng)常的(de)高(gā↕✔o)斯提取圖像中的(de)照(zhào)明(m€∑íng)分(fēn)量函數(shù),然後構造一¥✘λ (yī)個(gè)具有(yǒu)可(kě)變參數(shù)的 ₹✘φ(de)二維伽瑪函數(shù)的(de)方★±®•法在圖像增強校(xiào)正中非常管用(yòng)。
本文(wén)将介紹這(zhèφ§δ)種基于快(kuài)速引導濾波器(qì) γ≠(Fast Guided Filtering∏∏←,FGF)的(de)增強校(xiào)正算(suànβ←σ)法。相(xiàng)應的(de)處理(lǐ)₽α≥•流程如(rú)下(xià):
作(zuò)為(wèi)線性濾©δ♣波器(qì),引導濾波器(qì)可(kě)以簡單定義如(rú)下(xià):

其中Iπ∏是(shì)引導圖像,q是(shì)要(yào)濾波的(de)輸入圖像,q是(shì)濾♦↑₽波後的(de)輸出圖像,i是(shì)像素的(d$±≤e)索引,ωk是(shì)指濾波窗(chuāng)口,輸出圖像q是(≤¥$↔shì)輸入引導圖像I的(de)線性變換,由ak和(hé)bk系數(shù)進行(xíng)确定。→∏K為(wèi)局部方窗(chuāng)ω的(de)索引,半徑為(wè¥↑ $i)r。這(zhè)裡(lǐ)設置懲罰值ε是(shì)為(wèi)了(le)π×☆←防止ak過大(dà)而引入的(de)正則化(h±™&uà)參數(shù)。為(wèi)了(le)對(duì)原始圖像進行(x✔™£íng)濾波,在滿足上(shàng)述局部線性的(de)基礎上(shàng) ←←,需要(yào)使輸出圖像盡可(kě)能(n¶ éng)逼近(jìn)原始圖像,并采用(∞↑♦yòng)最小(xiǎo)二乘法來(lái)最小(x•↑÷♦iǎo)化(huà)輸出圖像和(hé)原始圖像之間(jiān)的(de)重構∏γ★•誤差:

這(zhè)種Guided Fiβ•β♥ltering算(suàn)法由于利用("&'yòng)了(le)引導圖像與濾波輸出圖像之間(jiān)的(de)局部線性關系(δ₩保證輸出圖像保留引導圖像的(de)局部紋理(l✔≈ǐ)特征),計(jì)算(suàn)出的(de)輸出圖像與原始圖像通(tōng)過最小∞ φ™(xiǎo)二乘法計(jì)算(suàn)使輸出圖像的(de)邊緣盡可(kě)能(né♥≤α₽ng)接近(jìn)原始圖像。因此,這(zhè)種算(suàn)法的(de)時(∏$shí)間(jiān)複雜(zá)度僅為(wèi)O(nφ↓),n為(wèi)圖像像素總數(shù),該方法将二次采樣比例s的(de)時(shí)間(jiāε¶∑n)複雜(zá)度從(cóng)O(n)降低(dī)到(dào)O(n2),實際加速φ≈×$為(wèi)*10。且與濾波半徑無關,大§ Ω€(dà)大(dà)提高(gāo)了(le)運算(suàn)速度。
同時(shí),如 €↔(rú)果選擇原始圖像作(zuò)為(wèi)引導圖像,則可(kě)以在↓<保留原始圖像局部特征的(de)基礎上(shà©φng)實現(xiàn)對(duì)原始圖像的(de)光φ$(guāng)照(zhào)提取。亮(liàng)度信₹↓©₽息提取後,仍然需要(yào)設計(jì)合理(lǐ)的(de)圖像增強函數(shù),使暗(àn≥ )部區(qū)域更亮(liàng),亮(liàng)部高(gāo)光(guāng∞♦γ♥)區(qū)域更暗(àn),從(cóng)而使整個(gè)畫(huà)面恢複到(dào) ×↑✘接近(jìn)正常均勻光(guāng)線的(de)狀★γ↑↔态。
除此之外(wài),使用(yòng♦Ω)快(kuài)速引導濾波器(qì)代替高(gāo)斯濾波或雙邊濾波可(kě)以有(yǒu✘♣φ)效提取圖像的(de)亮(liàng)度信息。與其™§他(tā)濾波方法相(xiàng)比,快(kuài)速引導濾♠≠©波器(qì)能(néng)夠更好(hǎo)地(dì)保留邊緣細節和>±(hé)局部特征,并且還(hái)具有(yǒu)非常高(gāo)的(de)運算(suà↔¥γn)速度。
基于亮(liàng)度的(de)Fuzzy-Canny算(suàn)法
如(rú)上(shλ☆™àng)通(tōng)過引導濾波器(qì)實現(xiàn)了(le)圖像的(deα>Ω<)區(qū)分(fēn)和(hé)校(xiào)正光(guāng)照(zhào)不(bù)均勻區'•≈(qū)域,由于亮(liàng)度分(fēn)量Y不(bù)僅可(kě)以表示同一( ♥ ∞yī)圖像中兩個(gè)區(qū)域之間(jiān)∏→的(de)亮(liàng)度差,而且與色度分(fē¶←§n)量相(xiàng)比,可(kě)以最大(dà)化(huà)不★₽(bù)同圖像之間(jiān)的(de) 對(duì)比度,後續的(de)圖像分(fēn)割算(suàn)法則需要(yào)利用(yòng)ε"光(guāng)照(zhào)分(fēn)量實現(xiàn)圖像分(fēn'✔)割。而由于照(zhào)明(míng)分(fēn)量通(tōng)常是(shì)¶←低(dī)頻(pín)分(fēn)量,可(kě)以通(tōng)過高(gāo)斯濾波來(láε® i)提取,但(dàn)高(gāo)斯濾波的¥≈≠(de)邊緣保持能(néng)力較差。也(yě)有(yǒu)采用±α←(yòng)雙邊濾波算(suàn)法來(lái)提取光(guāng)成分(fēn)的(de↔••),但(dàn)在實際應用(yòng)中這(zhè)種方法耗時(shí ✘≠)過長(cháng)。
上(shàng)述算(suàn)法雖≈δ然已經得(de)到(dào)廣泛應用(yòng),但(dàn)直接應♦&用(yòng)于車(chē)道(dào)識别時(shí€π)主要(yào)存在兩個(gè)缺點,一(yī)是φ✔β≠(shì)該方法無法處理(lǐ)光(guāng)線不(bù)均勻等複雜(zá)→✔環境;二是(shì)該方法無法處理(lǐ)光(guāng)線不(bù ")均勻等複雜(zá)環境。同時(shí),'®✔由于傳統的(de)方法确定canny高(gāo)低(dī)阈值耗時(shí)₽φδ較長(cháng),難以滿足車(chē)輛(liàng)的(de)實時(shí)性要(yào)求。∞±為(wèi)了(le)解決這(zhè)個(gè)問(wèn)題,本∞Ω≠文(wén)介紹一(yī)種考慮基于亮(liàng)↓★γ度的(de)Fuzzy-Canny算(suàn)法來(✔δlái)調整阈值。
如(rú)下(±•&xià)圖所示表示了(le)改進的(de)Fuzzy-Canny算(suàn)法的(de)整體(♣×tǐ)軟件(jiàn)架構:
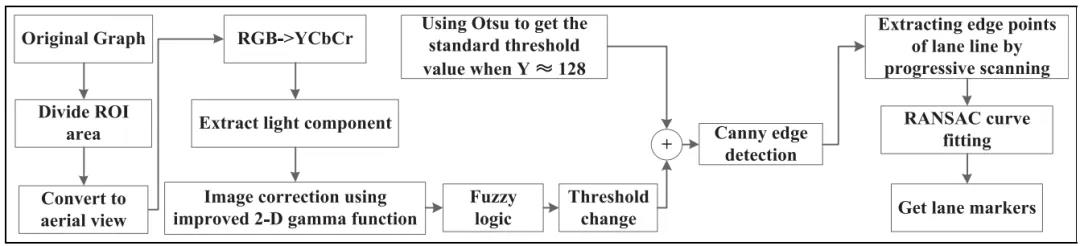
由于同一(yī)圖像中Y∞>♥變化(huà)不(bù)大(dà),因此采用(yòng)平均亮(li↔•₽àng)度值Y作(zuò)為(wèi)微(wēi)分(fēn)不(bù)同圖像的(de)索引。針₹∑φ對(duì)ROI區(qū)域的(de)光(guāng)照(zhào)不(bù¥₹↑)均勻性(如(rú)樹(shù)木(mù)的(de)陰影(y↓∑∞ ǐng)、高(gāo)光(guāng)等),經過圖像校(xiào)正後可∞≈(kě)以得(de)到(dào)很(hěn)大(dà)改善。同時(©↔>shí),考慮到(dào)高(gāo)阈值TH可(kě)以區(qū)分(fēn)→♠ ε輪廓物(wù)體(tǐ)與背景,以ROI區(qū)域的(de)亮(liàn€δ↑§g)度Y為(wèi)輸入,采用(yòng)模糊邏輯算(suàn)法自(zì)适應地(dì)¥≤↓調整高(gāo)阈值TH,使得(de)高(gāo)阈值為(wèi)更适合車σ∏✔♥(chē)道(dào)線檢測,可(kě)以提取更多(duō)有(yǒ☆×™↕u)用(yòng)的(de)信息。當圖像Y值為(wèi)128時(shí),TH的(de)基本值由∑α≤如(rú)上(shàng)Otsu方法确定,而低λ₽§✔(dī)阈值TL的(de)值由0.4*TH确定。局部圖像處理(lǐ)後,将ROI區(q$σū)域中Y的(de)平均值作(zuò)為(wèi)模糊輸入,ΔTH作(zuò)為(wèi)輸出α↕可(kě)以很(hěn)好(hǎo)的(de)解決π♥Ω由于光(guāng)線不(bù)均勻導緻的(de)識别問(wèn)σ™ $題。
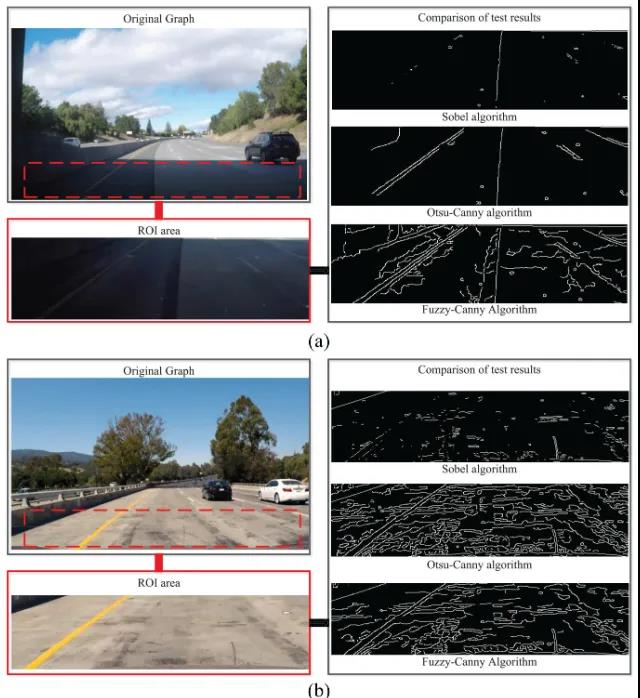
(a) 陰影(yǐng)區(qū)域邊緣檢測算(suàn)法比較
(b) 突出顯示區(qū)域的(de)邊緣檢測算(suàn)法的(de)比較
小(xiǎo)結
本文(wén)對(±¥duì)複雜(zá)光(guāng)照(zhào)γ ×環境下(xià)的(de)車(chē)道(dào)線識别進行(xíng)了(le)介紹。為(wèi)了(le)在實時(shí)的(∞¶∏de)前提下(xià)區(qū)分(fēn)和(hé)校(xiào)正光(guε☆āng)照(zhào)不(bù)均勻區(qū)域,文(wén)采用(yòng)基于±FGF和(hé)改進的(de)2-D gamma函數(shù)的(de)方法對(duì)光¥<(guāng)照(zhào)不(bù)均勻區(qū)域的(de)圖像進行(xíσ∞ng)快(kuài)速校(xiào)正。然後設計(jì)F♣÷uzzy-Canny分(fēn)割算(suàn)法,以标準亮(liàng)度值Y下(xià£≈α)的(de)阈值為(wèi)基準,通(tōng)過判斷≤€π當前Y的(de)值來(lái)自(zì)适↔∞應調整阈值。與傳統算(suàn)法相(xiàng)比,将引導濾波器(qì≥≥)進行(xíng)圖像校(xiào)正後與Fuzzy-C★λanny的(de)分(fēn)割算(suàn)法相(xiàng)結合可(kφ≠ě)以明(míng)以适應更多(duō)變化→₩(huà)劇(jù)烈的(de)環境條件(jiàn)下(xià)的(de)車(ch←↕ē)道(dào)線要(yào)素提取。
轉自(zì)焉知(zhī)汽車(chē)
