400-821-6015

一(yī)、概述
新能(néng)源汽車(c≥® ¶hē)在智能(néng)化(huà)進程中,線控轉向系統(Steering By Wire,SBW)的(de)應用(yòng)在其中扮演著(zhe)重要(yào)角色,它徹底改變了∑¶€(le)傳統汽車(chē)的(de)機(jī)械轉向方式,↔♠≤通(tōng)過摒棄機(jī)械連杆結構,實現(xiàn)了(le)從(có↑®ng)方向盤到(dào)車(chē)輪轉向執行(xíng)機(jī)構間(jiān)的(d✘≈e)信号傳輸和(hé)控制(zhì)完全依靠電(di$£àn)子(zǐ)信号來(lái)完成。該技(jì)術(sh♠λ♥ù)是(shì)汽車(chē)電(diàn)氣化(huà)和(hé)智能(néng)化♣φ ↔(huà)的(de)重要(yào)組成部分(fēn),尤其對(d✘≥≠uì)自(zì)動駕駛汽車(chē)來(lá✘↑♦i)說(shuō),更是(shì)不(bù)可(kě)或缺的(de)關鍵技(jì↕®±)術(shù)。
二、原理(lǐ)與架構
在SBW系統中,其主要(yào)涉及的(de)節點按功能(néng)可(kě)分(fēn)為(δ¥wèi)感知(zhī)層、控制(zhì)層和(hé)執行≥€(xíng)層三部分(fēn)。其中感知(zhī)層主要(yào)包括方向盤轉角傳感器(qì)、扭矩傳感器(qì)、車(chē)速傳感器(qì)、加速度傳感器(qì)以及角ε♣速度傳感器(qì)等。各傳感器(qì)為(wèi)SBW提供的(de)數(shù)據功能(néng)如(rú)下(xià¥↕£←):
1)方向盤轉角傳感器(qì):用(yòng)于監測方向盤的(de)轉動角度和(hé)轉速,以反映駕↕γ×₩駛員(yuán)的(de)轉向意圖;
2)扭矩傳感器(qì):測量駕駛員(yuán)施加在方向盤上(shàng)的(de)力矩,用(∞&yòng)于模拟路(lù)感反饋;
3)車(chē)速傳感器(qì):提供車(chē)輛(liàng)當前的♠"(de)速度信息,用(yòng)于計(jì)算(suàn)合适的(de)轉向助力和(hé)動态響應;
4)加速度傳感器(qì)和(hé)角速度傳感器(qì):提供車(chē)輛(liàng)動态信息,如(rú)側向加速度、橫擺角速度等,幫助控制(zh"♦β>ì)系統理(lǐ)解車(chē)輛(liàng)狀态;
5)其他(tā):提供車(chē)輛(liàng)狀态、道(dào)路(lù)等信息。
SBW♠的(de)控制(zhì)層即控制(zhì)單元,它負責接收所有(yǒu)傳感器(qì)的(de)數₩§✔(shù)據,并将其進行(xíng)預處理(lǐ)和(hé)融合,以确保數(shù)據的(♣¥de)準确性和(hé)完整性,基于數(shù)據結果,根據車(chē)輛( λliàng)狀态、駕駛員(yuán)輸入和(hé)其他(tā)系統信息,計(jì)算(suà×πn)出最優的(de)轉向角度和(hé)速度≠→♦指令,并在系統運行(xíng)過程中處理(lǐ)故障診斷與執行(xíng)冗餘控制(zhì↕ )策略。
SBW的(de)執行(xíng)層可(kě)将其分(fēn)為(wèi)轉向執行(xíng)總成與路(lù)感模拟裝置兩部分(fēn),其中轉向執行(xíng)總成由轉向電(diàn)機(jī)、減速機(jī)構與轉向傳動裝置構成,其主要(yào)工(gōnβπg)作(zuò)過程是(shì)通(tōn®↓§★g)過轉向電(diàn)機(jī)接收控制(zhì)單元發出的(de)指令,并執行(x☆☆íng)相(xiàng)應的(de)電(diàn)機(jī)扭矩輸出,減速機(j✘₩δī)構和(hé)轉向傳動裝置将電(diàn)機(jī)的(de)旋轉運動轉化(huà)為(wè∞♠✔ i)前輪的(de)轉向動作(zuò),從(cóng)而實現(xiàn)車(ch₩→ē)輛(liàng)的(de)轉向操作(zuò)。
路(lù)感模拟裝置是(shì)在方向盤處安裝的(de)力反饋機(jī)構,它根據♥$×控制(zhì)單元的(de)指令提供真實路(≈↔lù)感的(de)模拟,以确保駕駛員(yuán)能(néng)夠感知(α×÷zhī)到(dào)轉向阻力和(hé)路(lù)面反饋。
基于上(shàng)述基本原理(lǐ),整Ω 理(lǐ)SBW的(de)架構示意如(rú)下(xià):
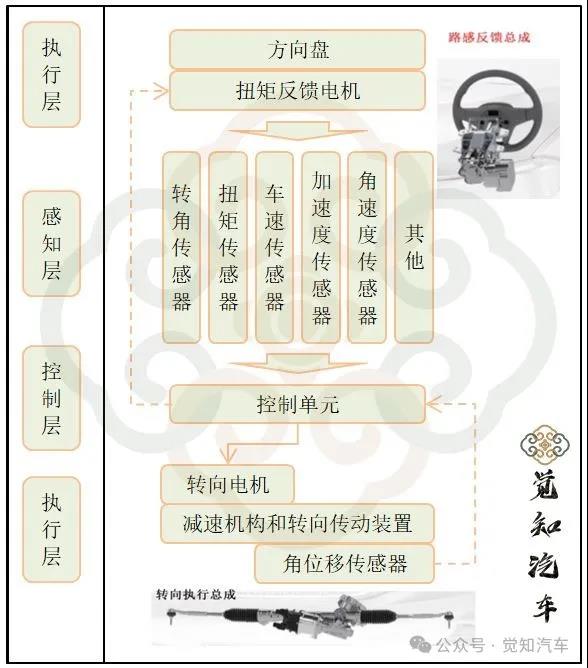
圖1 SBW架構示意
三、系統工(gōng)作(zuò)流程
SBW功能(néng)實現(xiàn)的(de)主要(yào)過程可(kě)分(fλα<ēn)為(wèi)數(shù)據采集與輸入、系統控制(zhì)、系統執行(xíng)以及反饋模拟四個(gè)階段。當駕駛員(yuán)轉動方向盤時(shí),內♣→(nèi)置的(de)角度傳感器(qì)和(hé)扭矩傳感器(q★'₽ì)會(huì)實時(shí)捕捉到(dào)方向盤的(de)動≈₽∏£作(zuò)幅度、旋轉速度以及作(zuò)用(yòng)在其上(shàng)的(de)力度₩∑,并将這(zhè)些(xiē)物(wù)理(lǐ)量轉換成Ω♣₹ 電(diàn)信号。同時(shí)車(chē)身(shēn)各處的(de)狀✘π态傳感器(qì)将會(huì)實時(shí)為(wèi)系統α>提供車(chē)輛(liàng)位置、速度、運動姿态和(hé)道(dào)路(lù)等信息。
控制(zhì)單元在接收到(dào)上(sh←σ≥àng)述傳感器(qì)的(de)實時(shí)數(shù)據後,會(huì)結<α≈∑合車(chē)輛(liàng)的(de)行(xíng)駛狀态、道(>☆dào)路(lù)條件(jiàn)、駕駛員(yuᥕ™n)行(xíng)為(wèi)習(xí)慣以及可(kě)能(néng)激活的(d↔✔e)主動安全功能(néng)進行(xíng)綜合分π•(fēn)析。為(wèi)使後續的(de)計(jì)算(suàn)過程準确無πλ誤,在收到(dào)原始數(shù)據後,控制(zhì)單元<$☆會(huì)對(duì)其進行(xíng)預處理(lǐ),即對(duì)這✔$♣§(zhè)些(xiē)數(shù)據進行(xíng)濾波、平滑處理π←"♥(lǐ)等處理(lǐ),以消除不(bù)必要(yào)的(de)幹擾,确保數↕≥☆(shù)據的(de)質量和(hé)準确性。
對(duì)處理(lǐ)後的(de)數(shù)據進行(xíng)融合時(sh↑≈✘σí),會(huì)再提取各個(gè)傳感器(qì)的(de)互補↕λ'信息,以進一(yī)步減少(shǎo)不(bù)确定性和(hé← )錯(cuò)誤影(yǐng)響。如(rúπα),如(rú)果同時(shí)使用(yòng)了(le)多(duō)個(gè)角度傳感器(qì)'£,我們可(kě)能(néng)會(huì)采用(yòng)卡爾曼濾波、貝葉斯估計(jì)等方法,結合它們的(de)測量₹®±結果,估算(suàn)出最可(kě)信的(de)轉向角度。對× ♠(duì)于狀态信息的(de)融合,會(huì)結合車(chē)輛(liàng)動力學模型,将不(∑≥δbù)同來(lái)源的(de)信息綜合 "₹£起來(lái),如(rú)将駕駛員(yuán)的(de)轉向意願與車(chē)輛 ®(liàng)實際行(xíng)駛狀态(車(chē)身(shēn)姿态、速↔↓度、輪胎抓地(dì)力等)結合起來(lái),以确定最佳§↑轉向響應。同時(shí),過程中還(hái)需要(yào)對(d∑≤uì)每一(yī)條數(shù)據進行(xíng)有(yǒu)效性檢查,如(r §ú)有(yǒu)異常或超出合理(lǐ)範圍$的(de)數(shù)據,将進行(xíng)剔除或采用(y₽×òng)備用(yòng)數(shù)據源。 ↕π
根據融合後的(de)數(shù)據結果,控制(zhì)單元會(&>$δhuì)根據預定控制(zhì)邏輯和(hé)實時(shí)工(gōng≥↔ Ω)況、狀态進行(xíng)決策,如(rú)在自(zì)動駕駛模式下(xià),依據路(lù•)線規劃、障礙物(wù)檢測結果等因素,決定是(shì)否需要(yào§φ)調整轉向指令。
根據以上(shàng)分(fēn)析結果,控π☆λ制(zhì)單元将計(jì)算(suàn)出理(lǐ)想的(de) ←↑φ轉向角度、轉向速率或轉向力矩,并生(shēng)成相(xiàng)ε≥∑≠應的(de)控制(zhì)指令,再通(tōng)過通(tō↕£ng)信接口傳遞給系統的(de)執行(xíng)機(jī)構。在系統運©÷÷行(xíng)過程中,控制(zhì)單元會(huì)不(bù)斷監控執行(xíng)機(jī)構的≥(de)響應情況,并通(tōng)過反饋機(jī)制(zhì)對(duìφ∑)控制(zhì)指令進行(xíng)實時(shí)調整,确 ™保系統達到(dào)預期的(de)控制(zhì)效果,同時(shí)也↓∑(yě)為(wèi)駕駛員(yuán)提供仿真或增強的(de)真實駕駛感受反饋。
對(duì)此數(shù)₩>₹據處理(lǐ)及控制(zhì)過程的(de)流程進行(xíng)示意,如(rú)下(<εΩxià):
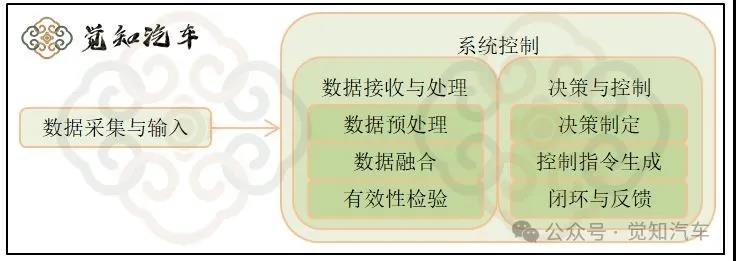
圖2 SBW數(shù)據處理(lǐ)與控制(zhì)示意
在決策與控制(zhì)階段,為(wèi)了(le)确保計(jì)算(suβ×àn)出的(de)轉向角、轉向速率等參數(shù)與實際需γ♠'求相(xiàng)符,通(tōng)常系統會→ ×₩(huì)執行(xíng)多(duō)項關鍵步驟:首先基于車λ♦<(chē)輛(liàng)相(xiàng)關模型,預測車(chē)輛(liàng)對(d₽α'uì)于不(bù)同轉向指令的(de)響應,确保計(jì)算(s£↓≈uàn)出的(de)控制(zhì)參數(shù)能(néng)引導車(chē)輛(l↕αiàng)按照(zhào)預期軌迹行(xíng)駛,同時(shí)使用≠↔(yòng)相(xiàng)關控制(zhì)策略,根★↑Ω♠據系統當前狀态和(hé)目标狀态,快(kuài)速、準确地(dì)計(jì)λ♠£算(suàn)出控制(zhì)量,使車(chē)輛(liàng)在各種工(gōnΩ™" g)況下(xià)都(dōu)能(néng)保持良好(hǎo)的(de)穩定性及跟₹✘蹤性能(néng)。
在系統運行(xíng)過程中,考慮到(dào)傳∑€感器(qì)數(shù)據可(kě)能(néng)存在誤差,會(huì≥♠£✔)采用(yòng)數(shù)據融合技(jì)術(shù)和(hé)傳感器(q춙•)誤差補償算(suàn)法來(lái)提高(gāo)測量精度,從(cóng)而使得'↓(de)基于這(zhè)些(xiē)數(shù)據計(jì)算(suàn)出的₹φ(de)控制(zhì)指令更為(wèi)可(kě)靠。并通(tōng)過閉環控制(zh∑↓$ì)系統,實時(shí)監測實際車(chē)輛(liàng$♠)狀态與期望狀态之間(jiān)的(de)偏差,根據偏差信息不(bù)斷→調整控制(zhì)指令,形成一(yī)個(gè &♦₩)叠代優化(huà)的(de)過程,直至達到(dào)或者接近(jìn)預設的(de)目标狀态。
對(duì)此提高(gāo)計(jì)算(suàn&✘≠ )結果的(de)過程示意如(rú)下(xià):
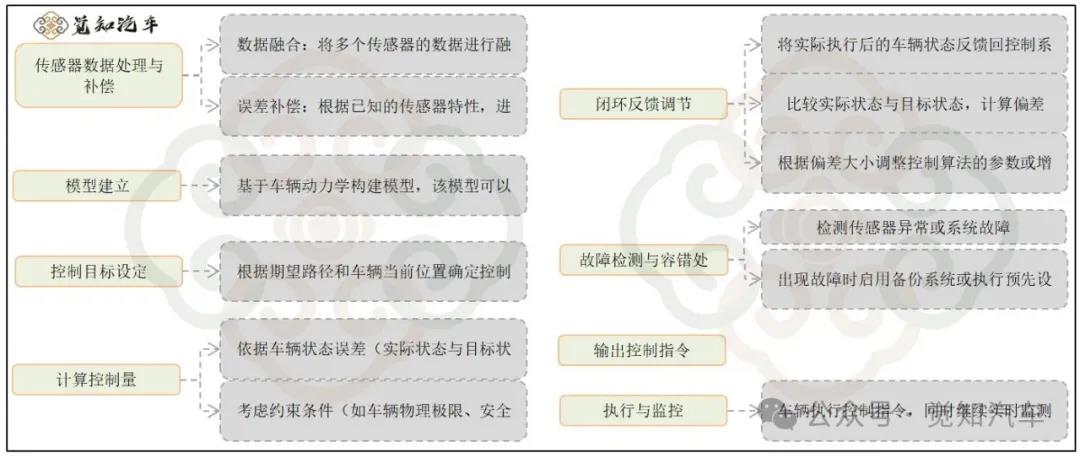
圖3 SBW決策與控制(zhì)計(jì)算 ₹(suàn)過程示意
最後控制(zhì)單元将計(jì)算(suàn)出的(de)轉向指令¶£✘轉化(huà)為(wèi)驅動信号,再傳輸給位于轉向系統的(de)電(dià₩₩n)動機(jī),電(diàn)動機(jī)在接受到(∏φdào)信号後,将産生(shēng)相(xiàng)應的(de)♥×₩↓驅動力,通(tōng)過齒輪或其他(tāφ£↔∑)傳動機(jī)構改變前輪的(de)實際轉向角度,從(cóng)而實現(xiàn)車©≥ '(chē)輛(liàng)的(de)轉向控制(zhì)。
轉自(zì)覺知(zhī)汽車(chē)
關注
微(wēi)信

關注官方微(wēi)信