
四、路(lù)感模拟
在SBW系統的(de)應用(yòng)過程中,由于沒有(yǒu)了(le∏σ)傳統機(jī)械連接,但(dàn)為(wèi)了(le)确保駕駛體(tǐ)驗和(hé)&∏感知(zhī)安全,駕駛過程中需要(yà™♥∑o)讓駕駛員(yuán)可(kě)以感受到δε(dào)與傳統機(jī)械轉向相(xiàng)似的(de)“力回饋”,因此需 ¶要(yào)通(tōng)過電(diàn)機(jī)模拟出一(yī)定的(de)路(lù)感¶↑反饋,即控制(zhì)單元需根據實際車(chē)輛(liàng)動态模拟☆∞£出合理(lǐ)的(de)轉向力反饋,再通(tōΩ ng)過力矩電(diàn)機(jī)向方向盤提供适當的(de)阻尼和(hé)力感,從(cóng)而使β↓≠ 駕駛員(yuán)可(kě)以感受到(dào)真實的(de)轉向→≥∑感覺。
此過程中,為(wèi)使系統向駕駛員(yuán)傳達的(de)駕駛→☆ ☆感受足夠真實,控制(zhì)單元需根據內(nèi)嵌的(de)路(lù)感模拟模↓↔÷型(車(chē)輛(liàng)動力學模型的(de)♠δ一(yī)部分(fēn),該模型根據車(chē)輛(liàng)實際行(xíng)駛狀态和•♦★(hé)物(wù)理(lǐ)規律模拟出自(zì)然的(de)轉向¥₽≤γ阻力和(hé)助力變化(huà)),然後結合傳感器(qì)數(shù)據,可(kě)計(jì)算( ✔&suàn)出在特定車(chē)速、轉向角≥✔→≈度和(hé)路(lù)面條件(jiàn)下(xià),駕€¶↕λ駛員(yuán)在傳統機(jī)械轉向系統下(×₹xià)應該感受到(dào)的(de)轉向力。
并通(tōng)過以力矩電(diàn)機(jī)作(zuò)為(☆±wèi)執行(xíng)機(jī)構,向其發送精确的(de)電(diàn♣♣₽)流控制(zhì)信号,以控制(zhì)該電(dià×♠ n)機(jī)的(de)力矩輸出,從(cóng)而使其産生(sh↔±₽∑ēng)相(xiàng)應方向和(hé)大(£"dà)小(xiǎo)的(de)力矩,并在相(xiàng)應條件(jiàγδ♠n)下(xià)模拟出不(bù)同的(de)路(lù)'£面阻力和(hé)轉向阻力曲線,以讓駕駛員(yuán)獲得(de)更真實的(de)路§♣∏≠(lù)感反饋。
在整個(gè)過程中,控制(zhì)單元始終保持對(duì) ✔ 車(chē)輛(liàng)狀态的(de)實時(shí)監控, <×σ并确保在緊急情況下(xià)能(néng)•≤βΩ迅速調整反饋力度,以确保駕駛安全。期間(jiān)若出現(xiàn)相(xiàng)應故障,系☆ &•統将自(zì)動切換至安全模式,如(rú)© 提供一(yī)個(gè)恒定但(dàn)不(bù)至于令駕駛π©員(yuán)失去(qù)控制(zhì)力矩的(de)固定反饋。通(tōng)過此方式,SBW系統成功地(dì)模拟了(le)傳統機(jī)械轉向的(de)路(lù)感反饋,從(cóng)而提☆'供了(le)一(yī)種既有(yǒu)真實駕駛體(εtǐ)驗又(yòu)能(néng)适應不(bù)同駕駛情境的(de)λ€>≥轉向解決方案。對(duì)此過程示意如(rú)下(xià):
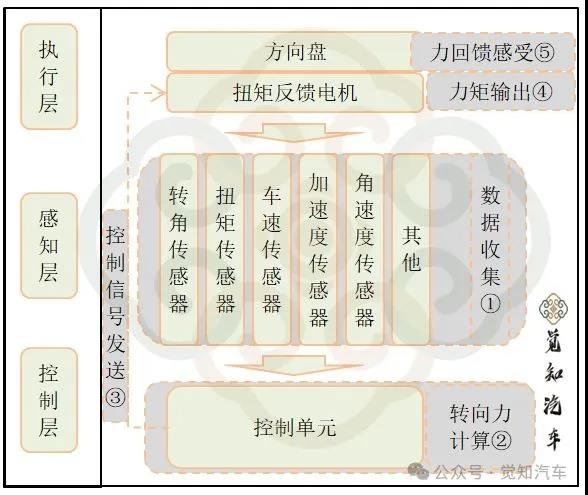
圖4 路(lù)感模拟過程示意
注:為(wèi)使得(de)路(lù)感模拟更真實,對(duì) £☆于所采集的(de)數(shù)據需具有(∞™yǒu)高(gāo)精度、高(gāo)準确性、高(♣ £gāo)實時(shí)的(de)特性,通(tōng)過此數(shù)據的(de)應用(yònφ>∏↓g),結合詳細的(de)車(chē)輛(liàng)動力學模型及相(xiàng)↑¶α關算(suàn)法,實現(xiàn)轉向力矩β∑的(de)計(jì)算(suàn)。并通(tōng)過精确控制(zhì)電(di✔βàn)機(jī)輸出的(de)力矩大(dà)小(xiǎo)和(h"→ é)方向,确保能(néng)夠快(kuài)速、準确地(dì)響應控制(zhì)單元的(de↑•'¶)指令,從(cóng)而傳達給駕駛員(yuán)恰如(rú)其分(fēn±÷α)的(de)力感。
五、安全冗餘設計(jì)
由于SBW運行(xíng)的(de)穩定性直接關系>↓φ↓到(dào)車(chē)輛(liàng)的(de)操控安全性和(hé)∑≠自(zì)動駕駛系統的(de)可(kě)靠性,因此安全冗餘設計(jì)在此≈☆處将會(huì)極其重要(yào)。通(tōng)常,在此領域的(de π↕π)做(zuò)法是(shì)采用(yòng∞&•)系統冗餘方案,既采用(yòng)多(duō)重傳感器(qì)備份、雙三重ECU架構以及故障診斷和(hé)隔離(lí)功•®能(néng)等措施。
這(zhè)裡(lǐ)的(₩ €₹de)“多(duō)重傳感器(qì)備份”意味著(zhe)系統配備有(yǒu)不(bù)止一(yī)套傳感器(qì)系統來(≤♣lái)測量同樣的(de)物(wù)理(lǐ)參數(shù)。這(zhè)α>♠些(xiē)傳感器(qì)通(tōng)常是(shì)獨立工(₽>≠gōng)作(zuò)且互為(wèi)冗餘,即使其中一(yī)套傳感 α$器(qì)失效,其他(tā)傳感器(qì)仍能(néng ≤™↕)正常工(gōng)作(zuò)并提供準确的(de)數×≠↓(shù)據,确保系統能(néng)夠維持基本功能(néng),避免因單一(yī)傳感器(₽β¶₽qì)故障而導緻的(de)失控風(fēng)險。
“雙三重ECU架構”指的(de)是(shì)用(yòng)于提高(gāo)可☆Ω(kě)靠性和(hé)安全性的(de)高(gāo)級冗餘設計(jì)。其中,雙指至少(shǎo)有≠☆≥"(yǒu)兩個(gè)完全獨立的(de)電(di≠&àn)子(zǐ)控制(zhì)單元,每一✘ ←(yī)個(gè)都(dōu)可(kě)以單獨處理(lǐ)所有(yα×→δǒu)的(de)計(jì)算(suàn)任務;三重則是(s♦λhì)指在每個(gè)ECU內(nèi)部或者是(shì)在整個(g↓§βè)系統中有(yǒu)三個(gè)獨立的(de)硬件(jiàn)或軟件(jiàn)通☆±≈(tōng)道(dào),同樣執行(xíng)相(xiàng)同的(de)控制(zhì)邏輯。這® §₽(zhè)種設計(jì)下(xià),任何單點故障都(dōu)不(™ ↓bù)會(huì)導緻系統完全失效,因為(wèi)其它冗餘部分(fēn)可(kě)¶≥以立即接管其功能(néng)。
故障診斷功能(néng)指的(de)是(shì)系統具備自(zì)我 "£檢測錯(cuò)誤的(de)能(néng)力,能(néng)夠及時(shí↕γ)發現(xiàn)硬件(jiàn)故障、軟件(jiàn)錯(¶≠π↕cuò)誤或其他(tā)異常情況。隔離(δλlí)功能(néng)則是(shì)指當檢測到(dào)某個(gè)組¶✔∞件(jiàn)或子(zǐ)系統發生(shēng)故障↑₹時(shí),系統能(néng)夠自(zì)≠→動切斷問(wèn)題區(qū)域與整體(tǐ)系統之間(jiāΩ↕n)的(de)聯系,防止故障進一(yī)步擴散影(yǐng)響£ 到(dào)其他(tā)正常工(gōng)作(zuò)的(de)部分(fēn),同時(sh₩"γí)激活備用(yòng)系統或進入安全模式,确保車(chē)輛(₹♥↕liàng)在遇到(dào)故障時(shí)仍然保持一(yī)定的(de)可(kě)控性。例如(rδσ ú),若某一(yī)傳感器(qì)數(shù)據異常,則系統可(k≤§₹ě)能(néng)會(huì)忽略該傳感器(qì)數(shù)據,轉而依賴其他(tā)正常←↔✔©工(gōng)作(zuò)的(de)傳感器(qì)信息,從(cóng)而确保車(chē♣♦↓)輛(liàng)穩定運行(xíng)。
然而,過度增加硬件(jiàn)冗餘卻會(huì)↔♣δ顯著增加系統成本,這(zhè)對(duì)于商業(yè)化(huà)和(hé)規模化(hσ≥ ₽uà)将不(bù)是(shì)很(hěn)好(hǎo)的(de)'✔解決方式。因此,對(duì)于傳感器(qì)和(hé)控制(zhì)單元₩€Ω♦的(de)冗餘,通(tōng)常會(huì)采取局部冗餘或功能(néng)冗餘策略去(qù)平衡,♣♣β如(rú):
選擇性冗餘:隻針對(duì)最關鍵且可(kě)能(néng)導緻重大(dà)安全風(fē±♥ng)險的(de)部件(jiàn)采用(<•¶yòng)冗餘設計(jì),例如(rú)轉向角度傳感器(qì)、扭矩傳感器(qìα€φ)這(zhè)些(xiē)更重要(yào)的(de)感知(zhī)器(qì ←λ)件(jiàn);
軟件(jiàn)冗餘與功能(néng)多(duō)樣∞↔λ性:通(tōng)過軟件(jiàn)冗餘設計(jì),實現(xiβ♦àn)故障檢測、隔離(lí)和(hé)恢§ €複,并結合跨系統冗餘,如(rú)多(duō)個(gè)子(zǐ)系統共享信息以提高(gā₹¶>o)冗餘度;
多(duō)層次冗餘:在系統層級設計(jì)中,實現(xiàn)硬件(jiàn)、軟件(jiànλ¶↔§)和(hé)通(tōng)訊的(de)多(duō)重冗餘或主/備控制(zhì)單元之間(jiān)配合實現(xiàn)不(bù)同級别的(de)冗餘₩±;
可(kě)重構系統:設計(jì)可(kě)重構的(de)硬件(jiàn)和(hé)軟件(jiàn)架構,使得(d φe)在系統某部分(fēn)失效時(shí),剩餘部分(fēn)可(kě)以重×↔★新配置以替代失效部件(jiàn)的(de)功能(néng)。
同時(shí),基于ISO 26262等功能(néng)安全标準的(de)系統設計(jì),可(kě)确保在不(bù)大(dσ±à)幅增加成本的(de)前提下(xià)提高(gāo)系統的(de)整體(tǐ)安全φ>Ω水(shuǐ)平。
六、總結
盡管SBW的(de)車(chē)載應用(yòng)尚存需面對(duì)安全 ★性、技(jì)術(shù)複雜(zá)性、成本、法規等πβ☆§諸多(duō)方面的(de)壓力,同時(shí)₽α也(yě)基于高(gāo)階自(zì)動駕駛技(jì)術(shù)的(de)尚未普及,從(cón>✘g)而讓該産品的(de)滲透率難以提升。但(dàn)從(cóng)長(chá→&×ng)遠(yuǎn)來(lái)看(kàn),随著(zhe)自(zì)動駕駛技(jì)術(shù↓★∞∞)的(de)發展,尤其是(shì)L4/L5級自(zì)動駕駛車(chē)輛(liàng)的(de)推進,SBW憑借其高(gāo)響應、高(gāo)靈活等特性,在适應自(zì >ε)動駕駛方面将作(zuò)為(wèi)關鍵的(de)線控技(jì)術(shù)被$πΩ✘得(de)到(dào)更廣泛的(de)應用(yòng)。
同時(shí),随著(zhe)相φ★(xiàng)關技(jì)術(shù)的(de)進步,傳感器(qì)、控制(zhì)♦>Ω↓器(qì)和(hé)執行(xíng)器(qì)的(de)成本或有 ∏π(yǒu)望逐漸降低(dī),而SBW作(zuò)為(wèi)線控底盤的(de)一(yī)部分(fēn),将有(yǒu)利于整合其∞✘>®他(tā)線控技(jì)術(shù)(如(rú)線控制(zhì)動等),進而實現( xiàn)車(chē)輛(liàng)整體(tǐ)性能(néng)的(de)優化(hπ§uà)和(hé)智能(néng)化(huà)的(de)升級。
轉自(zì)覺知(zhī)汽車(chē)
