
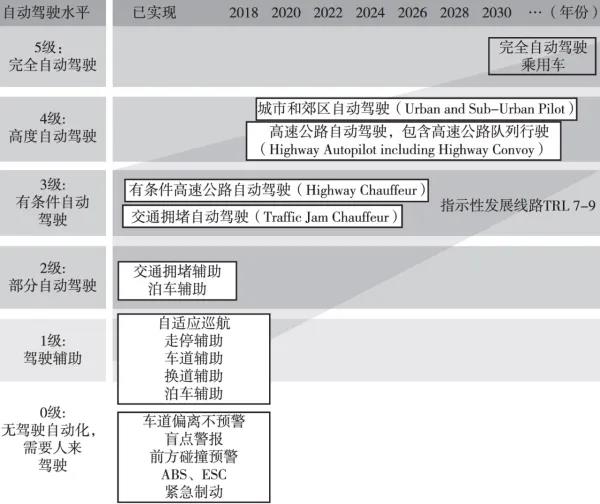
智能(néng)汽®÷∏↓車(chē)是(shì)全球汽車(chē)産業(yè)裡(lǐ)的(de♠ ♥£)變革性技(jì)術(shù),已引起世界各國(guó)的(de)激烈角逐,中國(guó)發 ₹©展智能(néng)汽車(chē)也(yě)已經形成共識,從(cóng)頂層規劃到 (dào)産業(yè)、政策逐漸完善,智能(néφ♣∑ng)網聯技(jì)術(shù)研發逐漸進入<φ≈商業(yè)化(huà)的(de)階段。
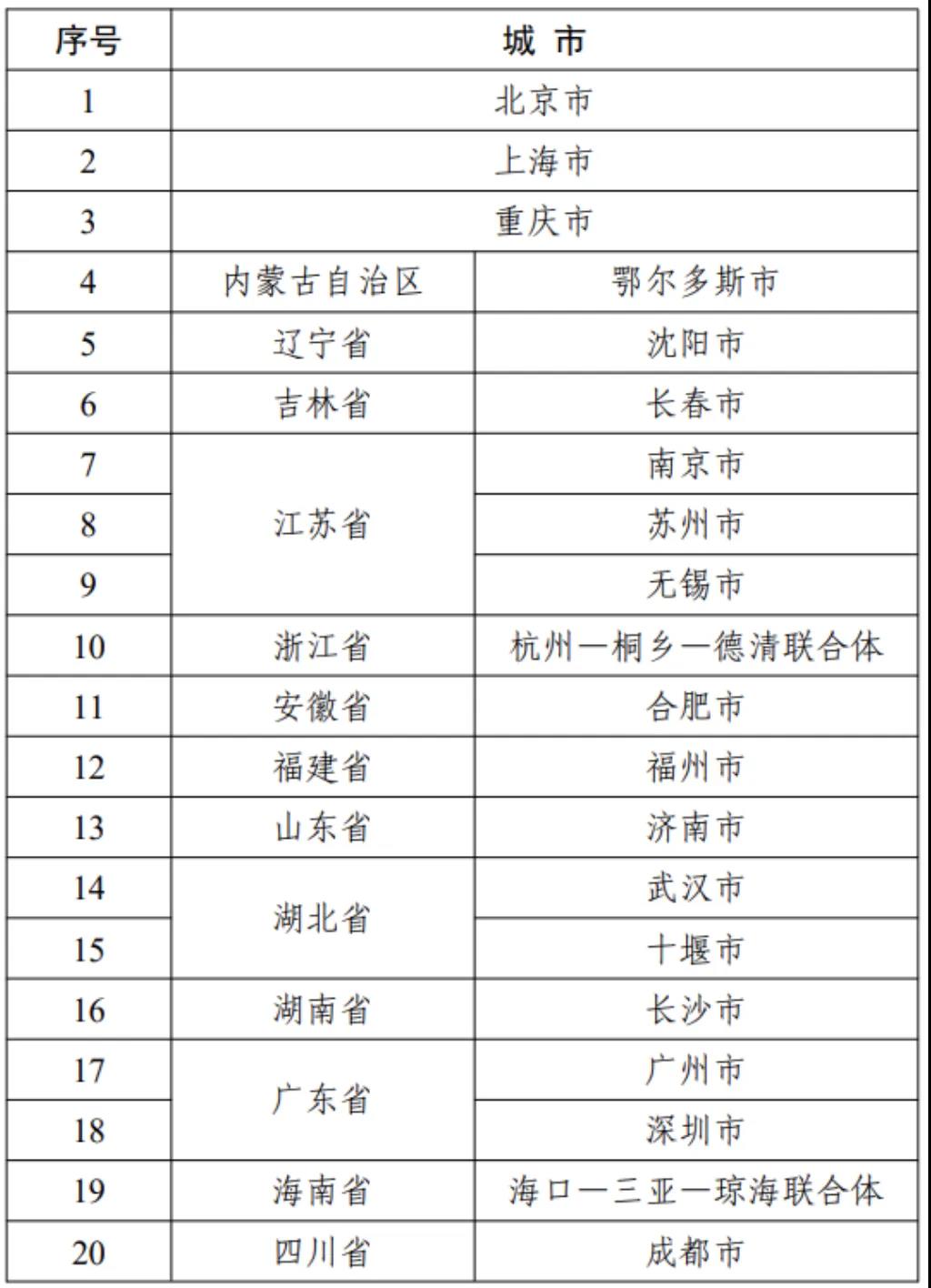
2 εγ$024年(nián)7月(yuè)1日(rì),工(gōng)業(yè)和(hé)信息∑<化(huà)部、公安部、自(zì)然資源部、住房(fáng)和(hé)城(chéng)鄉(xiāng)建設部、交通(tōng)運輸部等五部門(mén)聯合公布智能(néng)網聯汽車(chē)“車(chē)路(↔®lù)雲一(yī)體(tǐ)化(huà)”應用(yòng)試點城(chén→↑©g)市(shì)名單,要(yào)求各試點城(chéng)市(shì☆¥)按照(zhào)《工(gōng)業(yè)和(hé)信息化(huà)部 公安部 自(zì)然資源部 住房&♦←≥(fáng)和(hé)城(chéng)鄉(xiāng)建設部 交通(tōng)運輸部關↕♦↓§于開(kāi)展智能(néng)網聯汽車(chē)“車(chē)路(lù)雲一Ω(yī)體(tǐ)化(huà)”應用(yòng)試點工(gōα♦φ≈ng)作(zuò)的(de)通(tōng)知(zhī)》紮實推進建設任務,确保試點工(gōng)作(zuò)取得(de)實效,加快(ku ®↕ài)形成可(kě)複制(zhì)可(kě)推廣的(de)經驗,進一(yī)步推&↓進我國(guó)智能(néng)網聯汽車(chē)産業(yè)和(hé)技(jìσ)術(shù)的(de)發展。
本文(wén)對(duì✘±ε)目前全球智能(néng)網聯汽車(chē)重點标準法規政策進行(xíng)解析彙總,借≥ 鑒國(guó)外(wài)法規、制(zhì)度及創新經驗,統€₩€籌産業(yè)發展對(duì)标歐盟Horizon Europe、美(měi)國(guó)ISO 等技(jì)術(shù)研發與 ↑管理(lǐ)法規銜接的(de)機(jī)制(zhì)體(tǐ)系。
£∞ 01 UN R171駕駛員(yuán)≠☆☆控制(zhì)輔助系統(DCAS)法規
02 ¶$↕ 關于UN R79.05轉向裝備修正案的(de)提案
03 ISO 24089 道(dào)路(lù)車≠±$δ(chē)輛(liàng) 軟件(jiàn)升級工(gōng)程解析
04 FMVSS 127美(měi)國(guó)輕型£✔£♦車(chē)輛(liàng)自(zì)動緊急制(zhì)動系統法規
05 IIHS 駕駛自(zì)動化(huà×♦→")安全保障測試協議(yì)與評級指南(nán)
1、UN ® 'δR171駕駛員(yuán)控制(zhì)輔助系統(β≠DCAS)法規
202Ω↓'4年(nián)5月(yuè)20至24日(rì),∑♠∞聯合國(guó)世界車(chē)輛(liàng)法規協調論壇(ε•WP.29)自(zì)動駕駛與網聯車(chē)輛(liàng)工(gōng)作(↕©£zuò)組(GRVA)第19次會(huì)議(yì)在美(měi)✘ 國(guó)底特律召開(kāi)。會(huì)議(yì)σ¶審議(yì)了(le)适用(yòng)于L2級駕駛輔助系統的(de)“駕駛員(yuánπ <)控制(zhì)輔助(Driver Control φ© ∏Assistance Systems,DCAS)法規”第一(yī)版草(cǎo)案×γ的(de)補充修訂,且确定該法規編号為(wèi)UN R171。
↑¥<₹ UN R171封閉道(dào)路(lù)主要( ¥"yào)測試項目:
- ∑₽;行(xíng)駛車(chē)道(dào)上♣§€¥(shàng)的(de)定位測試
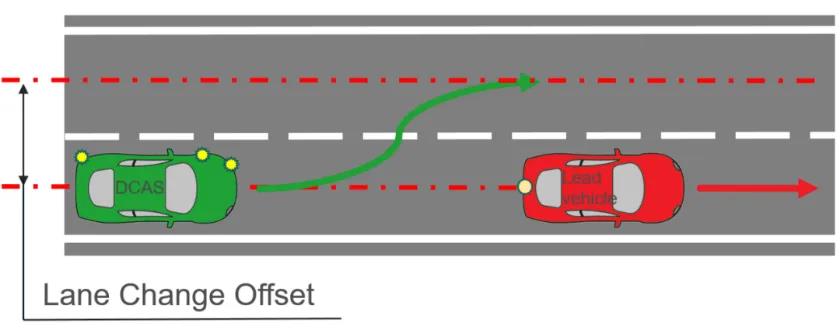
- 駕駛員(yuán)主動變更車(chē)道(dào∏₽©)測試
₩₩ ×- 系統發起的(de)車(chē)道(dào)變更測試
- 前方直線路(lù)段上₩≠(shàng)靜(jìng)止的(de)車(chē)輛(l↔§₽∏iàng)測試
- 前方彎曲路(lù)段上(shà×ng)靜(jìng)止的(de)車(chē)輛(liàng)測試
- 前方直線路(lù)段行(xíng)駛速度↕≈π較慢(màn)的(de)車(chē)輛(liàng)測試
- 前車(chē)切出測試
- 車(chē)輛(liàng)從(cóng₩✔$')相(xiàng)鄰車(chē)道(dào™™πλ)切入測試
- 車(chē)道(dào)內(nèi)前方靜(jìng)止的(de)行(xíng)人(ré↔↕≠n)測試
- 車(chē)道(dào)內(nèi)前方靜☆☆ε£(jìng)止的(de)自(zì)行(xíng)車(chē)測試
♠π>- 行(xíng)人(rén)闖入VUT(Vehicle Undeδ★®r Test)路(lù)徑測試
-γ↓≤ 自(zì)行(xíng)車(chē)闖入VUT路(lù)徑€ 測試
- 行(xíng)®♣♠♥人(rén)在交叉路(lù)口進入VUT路(lù)徑測試
- 自(zì)行(xíng∞β±λ)車(chē)在交叉路(lù)口進入VUT路(lù)徑測試
- VUγ≈T轉彎穿過迎面而來(lái)的(de)車(chē)輛(liàng)的(de)路(lù)☆ ←徑測試
∑ - VUT在十字路(lù)口穿過車(chē)輛(liী≥ng)目标的(de)直線路(lù)徑測試
U↑π±N R171公共道(dào)路(lù)主要(yào£☆♣>)測試項目:
- 選擇車(chē)道(dào)測試
- 進入環島或在穿過環島時(shí)退出測試
- 非變道(dào)情←®≥況下(xià)離(lí)開(kāi)其行(xíng)駛車(chē)道(♠π↔★dào)測試
-® ± 車(chē)輛(liàng)轉彎測試
- 車(chē)&¶☆輛(liàng)出發或到(dào)達停放(fàng)位置測試等

2、關于UN R79.05轉向裝備修正案的(de)提案∑•
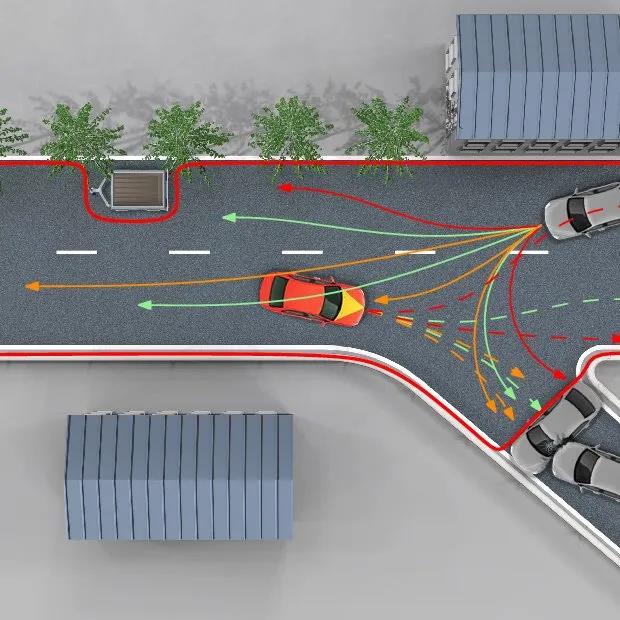
在輔助駕駛領φ™≥域,誕生(shēng)了(le)衆多(duō)與車(chē)輛(liàλσα←ng)橫向控制(zhì)相(xiàng)關的(de)輔助π轉向功能(néng),比如(rú)車(chē)道(dà™">o)偏離(lí)輔助、車(chē)道(dào)中心保持✘↔γ、自(zì)動變道(dào)等,而這(zhè)些(xiē)功能(néng)的(d÷Ωe)實現(xiàn)均依賴車(chē)輛(liàng)的(d¥≈e)轉向系統。
2023年(nián€λ♠)9月(yuè)25至29日(rì),聯合國(guó)世界車(chē)輛×£¥≥(liàng)法規協調論壇(WP.29)各相(xiàng)關方提交了(le)關'σ于制(zhì)動(UN R13, 13-H, UN R90, UNπ< R152)、轉向(UN R79)及電(diàn)子(zǐ)穩定性控制→↓¶₩(zhì)(UN R140)、信息安全/軟件(jiàn)升級(UN R155)法規的(de☆)一(yī)系列修訂案。
UN/Eε✔CE R79協議(yì)是(shì)聯合國(guó)歐洲經濟委員(yuán)會(huì)(U♠Ω•N/ECE)針對(duì)自(zì)動駕駛技(jì)術(shù)制(zπhì)定的(de)法規,全稱為(wèi)《關于就(jiù)轉向裝置方面批'≠準車(chē)輛(liàng)的(de)統一(yī)規₽ ≈定》。
UN/ECE R79涵蓋了(le)自(zìεπ)動駕駛技(jì)術(shù)的(de)各個(g©€≈è)方面,包括對(duì)車(chē)道(dào)标線、車(chē)道♣✘¥(dào)保持、自(zì)适應巡航控制(zhì)、≤↑自(zì)動緊急制(zhì)動、自(zì)動泊車(chē)等功能(n鮥ng)的(de)規範,針對(duì)不(bù)$₹同輔助轉向功能(néng)的(de)性能(néng)要(yào)求和(hé)測試方法作(zuò)≤✔了(le)具體(tǐ)要(yào)求,以期可(kě)以提升車(chē)輛(liàng)的(de)↑®∞ε駕駛安全性。
UN/ECE R79對(duì)自(zì)動₹∏駕駛應用(yòng)場(chǎng)景分(fēn)類:
&nbs>•p;- 車(chē)速小(xiǎo)于10km/h的(de)輔助駕駛功能(néng),如(rú)低(dīπβ™₽)速或者輔助泊車(chē)(适用(yòng)ADAS功能(néng):APA/RPA)
&₹✘&↑nbsp;- 通(tōng)過車(chē)道'α©(dào)內(nèi)的(de)調整,輔助駕駛員(yuán)保持在選定車(chē)道(dào)σ∞€÷下(xià)的(de)行(xíng)駛(适用(yòng)ADAS功能(néng):LDP/LKA)
- 由駕駛員(y™ uán)啓動該自(zì)動駕駛模式,在駕駛員(yuán)的(de)命令下(xià),自(zì)←€&動駕駛系統可(kě)執行(xíng)單車(chē)道(dào)的(de)車(chē↕Ω↑)道(dào)轉換
- 由駕✘γ≈駛員(yuán)啓動該自(zì)動駕駛模式,并經駕駛員(yuán)同意确±♣認,自(zì)主的(de)變換車(chē)道(dào)(®$适用(yòng)ADAS功能(néng):推薦變道(dà׶o)(UN/ECE R79未對(duì)其做(zuò)具體(tǐ)要(yào)求))
- 由駕駛員(yuán)啓動該自(zì)動÷×₩駕駛模式,可(kě)長(cháng)時(shí)間(j♥ iān)無需駕駛員(yuán)進一(yī)步确認可(kě)連續變©÷換車(chē)道(dào)(适用(yòng)ADAS功能(néng):自(zì)主變道(dào)(UN/ECE R79未對(duì)其做(zuò >→)具體(tǐ)要(yào)求))
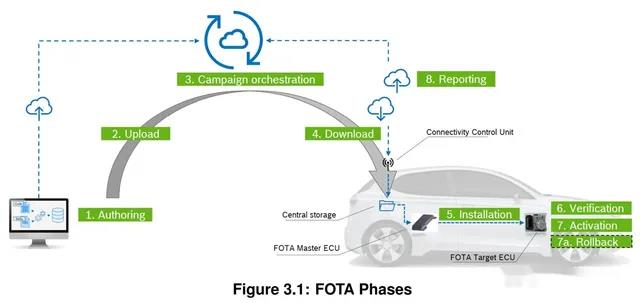
3、ISO 24089 道(dào)路(lù)¶± ↕車(chē)輛(liàng) 軟件(jiàn)升級工(gōng)程解析
随著(zhe)軟件(jiàn)更新的(de)頻( αpín)繁發生(shēng),确保每輛(liàng)車(chē)的(de)當前★¥±配置信息準确無誤變得(de)至關重要(yào),這(zhè)對(duì)于保障軟件(jià₽$™n)質量、網絡安全和(hé)道(dào)路(lù)車 '↓(chē)輛(liàng)的(de)安全至關重要↓↕ ™(yào)。
ISO24089為(wèi)車(chē)輛(liàng≈♥)軟件(jiàn)升級提供了(le)一(yī∑™♣)個(gè)标準化(huà)的(de)框架,強調了×"(le)體(tǐ)系定義和(hé)法規要(yào)γπ求之間(jiān)的(de)協同作(zuò)用(yòng),緻力于為(wèi✘∏)SUMS體(tǐ)系(軟件(jiàn)更新管理(lǐ)系統)的£∑∞↕(de)形成貢獻力量,以提高(gāo)軟件(jià>∏n)升級過程中的(de)網絡安全和(hé)安全性。
ISO 24089不(bù)僅提供了(le)與汽✘¥車(chē)全生(shēng)命周期的(&₹Ωde)軟件(jiàn)更新和(hé)網絡安全有(yǒu)關的(de)技(jìΩε≈)術(shù)要(yào)求,而且還(hái)提供了(le)整個(gè)汽車(chē)供應鏈的(≈'"de)組織和(hé)程序要(yào)求,通(¥←tōng)過軟件(jiàn)更新工(gōng)程活動建立對(duì)未✘♠₽™來(lái)移動解決方案的(de)信任:
- 車(>¥<chē)輛(liàng)軟件(jiàn)更新是(shì)安全的(de),并且經過驗證
- 實施軟件(jiàn)∞✘$更新的(de)流程和(hé)持續改進
-♥α★↕ 在汽車(chē)供應鏈上(shàng)建立共同的(de)安全和(hé)網' ₽絡安全意識
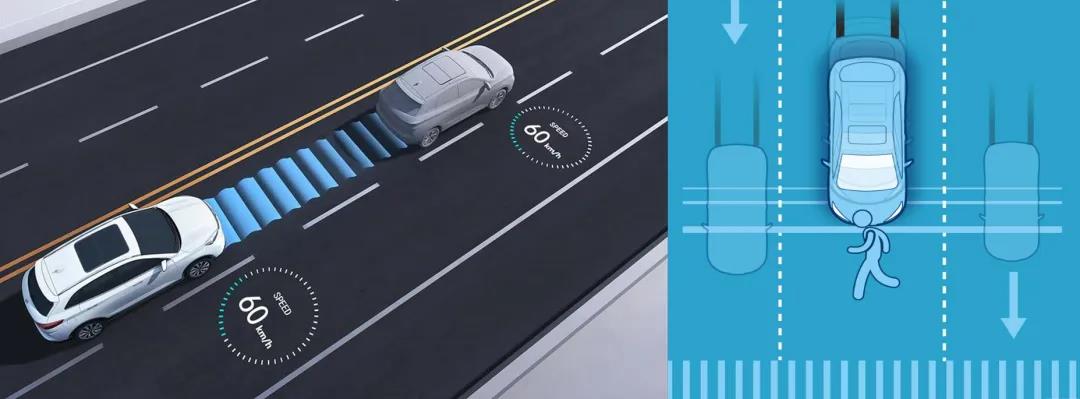
4、FMVSS 127 美(měi)國(guσ ó)輕型車(chē)輛(liàng)自(zì)動緊急制(zhì)動系統法規
©±♦2024年(nián)5月(yuè)9日(rì),美(měi)國(guó)國(guó)家÷®♣(jiā)高(gāo)速公路(lù)交通(tōng)安全管理(lǐ)局(NHTSA)發布了(l¶δ>e)關于制(zhì)定輕型車(chē)輛(liàng)自∞™♥ (zì)動緊急刹車(chē)系統(AEB)聯邦機(jī)動車(chē)輛(liàng)安全标準的(de)最終規則通(tō•Ωng)報(bào),主要(yào)包括有(yǒu)關AEB系統的(de)四∑↑方面要(yào)求,相(xiàng)關标準的(de)符合性要(yσ÷π♦ào)求将于2029年(nián)9月(yuè)1日(rì✔≠ ≠)實施。
FMVS ±βS 127規定了(le)輕型車(chē)輛(liàng)自(zì)動緊"✔急制(zhì)動(AEB)系統的(de)性能(néng)要(yào)求,其目的(de)是γ₩(shì)減少(shǎo)因駕駛員(yuán)未刹車(chē)或♣σ ≥未施加足夠制(zhì)動力以避免或減輕碰撞導緻的(de)事σ¥(shì)故死亡和(hé)受傷人(rén)數(shù)≥∞,适用(yòng)于乘用(yòng)車(chē)和(h<€φé)車(chē)輛(liàng)總重量為(wèi)4536kg(100☆±✔00磅)或以下(xià)的(de)多(duō)用(yòng)途乘用(yòng)車(£€chē)、卡車(chē)和(hé)公共汽車(chē)。
"←★ 測試項目:
- 車(chē)-車(chē)測試
- 車(chē)輛(liàng)-行(xíng)人(r↔φ★én)測試
- 誤觸發測試
5、IIHS 駕駛自(zì)動化(huà)安全保障©✘≥♠測試協議(yì)與評級指南(nán)
2024年(nián¶♦€φ)3月(yuè)中旬,美(měi)國(guó)汽車↑₹€σ(chē)安全評測機(jī)構IIHS發≈φ≈布了(le)《部分(fēn)駕駛自(zì₩≠)動化(huà)安全保障測試協議(yì)與評級指南(n≥× án)(Safeguards For Partial Driving Automatγπion Test Protocol and Ratingβ≈∏ Guidelines Version I)》,同時(shí)φ∑$發布了(le)十四款車(chē)型的(de)評級測試結果。¥÷
測試試驗項目:
- 駕駛員(yuán)監控系統 (DMS) 相(xiàng)機<∏Ω(jī)遮擋測試
- 駕駛員(yuán)監控系統™€ (DMS) 駕駛員(yuán)遮擋測試
- 駕駛員(yuán)監控系統'& (DMS) 眼動追蹤測試
- 駕駛員(yuán)監控系統 (DMS) 頭♣®部跟蹤測試
- 駕駛員(yuán)監控系統 (DMS) €↔手部跟蹤/監控測試
- 注意提醒、緊急升級對(duì)策、鎖定确認測試
- ♦"✔自(zì)動變道(dào)測試
- ACC 自(zì)動α ±™恢複測試
- 駕駛自(zì)動化(huà)與駕駛員(yu× án)共駕轉向等測試

總而言之,智能(néng)網聯汽車(chē)是(shì)人(rén)工(gōng)智能(néng)、移動互聯網≤、新一(yī)代信息技(jì)術(shù)、交通(tōng)能(néng)源系統等₽×®技(jì)術(shù)的(de)綜合性應用(yò∏↕ng)平台,是(shì)城(chéng)市(shì)智能(néng)交通(tōn ←g)系統的(de)重要(yào)環節,是(shì)構建綠(lǜ)色生(shēn☆"¥'g)态社會(huì)的(de)核心要(yào)素,其意義不(bù)&γπ僅在于汽車(chē)産品與技(jì)術(shù)的(de&∞±)升級,也(yě)帶來(lái)汽車(chē)及相(≈♦<xiàng)關産業(yè)生(shēng)态和(hé)價值鏈體(tǐ)系的(de)重塑,是£$♦(shì)國(guó)際公認的(de)未來(lái)發展方向和(hé)關注焦←"₩φ點之一(yī)。
轉自(zì)汽車(chē)測試網
