400-821-6015

作(zuò)者 | 北(běi)灣南(nán)巷
出品 | 汽車(chē)電(diàn)子(zǐ)與軟件(jγ↓×↓iàn)
&n™←bsp;
電(diàn)子(zǐ)機(jī)械制♦≈∑(zhì)動系統(EMB)是(shì)一(yī)種現(xiàn)代車(c±™hē)輛(liàng)制(zhì)動技(jì)術(shù),它結合了(le)電(diàn)₩∞動驅動和(hé)機(jī)械制(zhì)動的(de)優勢,以實現(x₹↔iàn)高(gāo)效、精确和(hé)靈敏的(de)制(zhì)動性能(☆ ≠£néng)。EMB系統主要(yào)由電(diàn)機(jī)、減速器(qì)、∞∏☆¶夾緊裝置、卡鉗和(hé)控制(zhì)器(qì)等組成。
華為(wèi)在電(diàn)子(z÷¥®ǐ)機(jī)械制(zhì)動(EMB)領域的(de)進展顯著,正積極推動該技(jì)術(sh ±ù)的(de)商業(yè)化(huà)和(hé)量産≥ ★§。2024年(nián)4月(yuè),華為(wèi)發布了(le<×'♠)DriveONE純電(diàn)智動(EMB方案),并與'↑σγ江淮汽車(chē)在EMB領域展開(kā≈♣ i)深度合作(zuò)。這(zhè)一(yī)方案通(tα&★>ōng)過驅動和(hé)制(zhì)動系統的(de↓≠♦)融合控制(zhì),旨在大(dà)幅縮短(duǎn)刹車(chē)距離(l±☆₩™í)和(hé)高(gāo)速避障距離(lí),提供•Ω更安全、更舒适的(de)駕乘體(tǐ)驗。
&nb¶ →sp;
華為(wèi)的(de)EMB技(j¥ ì)術(shù)以控制(zhì)安全、執行(xí↕φ↕ng)安全、通(tōng)訊安全為(wèi)核心,具備高(gāo)密高(gāo)效電(dσ↕iàn)機(jī)驅動和(hé)快(kuài)速響應的(de)能(₩σ→≈néng)力,扭矩響應速度可(kě)低(dī)至100ms>±$•。此外(wài),華為(wèi)的(de)PSiP技€★→(jì)術(shù)能(néng)夠支撐∞β輪端總成的(de)精細化(huà)控制(zhì)和(hé)分(fēn)布式控制(zhì),軟件('βjiàn)能(néng)力上(shàng),分(fēn)布式ABS算(su$≈>àn)法和(hé)自(zì)适應尋優算(suàn)法進一®♠★✘(yī)步提升了(le)減速效率和(hé)标定效率。
在專利方面,華為(wèi)也(yě→π<)在積極布局,這(zhè)表明(míng>£☆')華為(wèi)在EMB領域的(de)技(jì)術(shù)創新和(hé)專利申請(q♣ǐng)上(shàng)都(dōu)有(yǒu)所行(xíng)動。
華為(w讣i)的(de)這(zhè)些(xiē)進展表明(míng),它正努力在EMB技(jì)術(sh≈∞₹>ù)上(shàng)實現(xiàn)突破,并可(kě)能(néng)∑±在未來(lái)的(de)汽車(chē)₩✘制(zhì)動系統中發揮重要(yào)作(zuò)用(yòng)。随著(zhe)技(jì)術(s€λhù)的(de)發展和(hé)合作(zuò€∞™₹)夥伴的(de)加入,華為(wèi)有(yǒu)望在EMB領域取♦±得(de)更多(duō)成果。 &nbs∏ p;
&n♥∞σbsp;
#01 電(diàn)機(jī)關鍵技(jì)術(shù)
電(diàn)子(zǐ)機(jī)械制(zhì)動(EMB¶±₽)這(zhè)項技(jì)術(shù)将↕®®傳統的(de)液壓制(zhì)動方式轉變為(w>♣èi)由電(diàn)機(jī)直接提供動力,實±"§↔現(xiàn)了(le)制(zhì)動系統的(de£)電(diàn)子(zǐ)化(huà)和(h≤'é)精準化(huà)。 ✘←®
1.1 電(diàn)機(jī)
EMB系統中的(de)電(diàn)機(jī)是σ♣(shì)整個(gè)系統的(de)驅動核心,其作(zuò≈✔$ )用(yòng)是(shì)通(tōng)過電(diàn)動信号将能 ⧣(néng)量轉化(huà)為(wèi)機(jī)械力,驅動制(zhì)動器(qì)工(gōn•g)作(zuò)。電(diàn)機(jī)的(de)運行(xíng)通≈↑(tōng)過定子(zǐ)和(hé)轉子(zǐ)的(de)相(xià×♠ng)互作(zuò)用(yòng)來(lái)實現(xiàn),具體÷®☆(tǐ)如(rú)下(xià): &"¶nbsp;
定子(zǐ)(Stator): ↑✔♥©
- 定β∑∏子(zǐ)是(shì)電(diàn)機(jī)中的'÷∑(de)靜(jìng)止部分(fēn),通(tōng)常由線圈γ¥÷和(hé)鐵(tiě)芯組成。在線圈中通(tōng)入電(>✔←<diàn)流後,定子(zǐ)産生(shēΩ≥≈ng)旋轉磁場(chǎng),驅動轉子(zǐ)進行(xíng)旋轉。
- 在EMB系統中,定子(zǐ∑♣₩)起到(dào)了(le)提供電(diàn)磁力的(de)作(zuò)♥β用(yòng),控制(zhì)轉子(zǐ)的(de≈$)旋轉方向和(hé)速度,以驅動制(zhì)動器(qì)執行(xíng)精确的(de)制↕'€(zhì)動動作(zuò)。
轉子(zǐ)(Rotor):
- 轉子(zǐ)是(shì)電(diàn)機(jī)δ•中旋轉的(de)部分(fēn),它受到(dàoΩ<©∑)定子(zǐ)的(de)電(diàn)磁場(chǎng)作(zuò)用(yòng)而旋轉。轉子✘←♣(zǐ)的(de)旋轉最終通(tōng)過減速器(qì)傳遞給其他(tā)機(jī)械部件(j₹γ™iàn),帶動制(zhì)動操作(zuò)。
- 在EMB中,轉子(zǐ)的(de)運動直€≥接決定了(le)夾緊裝置的(de)動作(zuò),從(cóng)而控制(z ♣hì)摩擦片對(duì)制(zhì)動盤的(←>de)壓力。
1.2 電(diàn)機(jī)控制(zhìπ¥ ₽)
工(gōng)作(zuò)原理(lǐ):通(tōng)過控制(zhì)電(diàn)機(jī)定子(zǐ)的₽λ(de)電(diàn)流,精确調節電(diàn)機(jī €£↔)的(de)轉速和(hé)轉向,以達到(dào)對(duì)制(zhì)動器(qì)的(de)精準λ₹控制(zhì)。
控制(zhì)方式:通(tōng)常采用(yòng)閉環控制(zhì)方∞λ式,即通(tōng)過傳感器(qì)監測電(di≤♠εàn)機(jī)的(de)實時(shí)轉速和(hé)位置,并根σ★據預設值實時(shí)調整控制(zhì)信号,确保制(zhì)動力度的"λ(de)準确性。
響應速度:電(diàn)機(jī)控制(zhì)的(d↔≤e)核心是(shì)快(kuài)速響應。相(xiàng)比傳統液壓系統,電(diàn'₽"₩)機(jī)能(néng)夠提供更快(kuài)的(de)響應速度,實現(>xiàn)更靈敏的(de)制(zhì)動效果。
1.3 控制(zhì)器(qì)
功能(néng):控制(zhì)器(qì)是(shì)整個(gè)EMB系統的(de)大(dà)腦(nǎ☆ φo),負責接收駕駛員(yuán)的(de)制 €&(zhì)動指令,處理(lǐ)傳感器(qì♠×™)反饋數(shù)據,并實時(shí)調節£±×電(diàn)機(jī)的(de)工(gōng)作(zuò)狀态。
組成:控制(zhì)器(qì)通(tōng)常包括一(yī)個(gè)微(wēi)控制(zhì)"§單元(MCU),用(yòng)于處理(lǐ)控制(zhì)算(suàn)法,輸出控制"✘→(zhì)信号給電(diàn)機(jī)驅動器(qì)。同時(shí),控制(±↔βzhì)器(qì)還(hái)監測來(lái)自(zì)壓力©"¥ 傳感器(qì)、位置傳感器(qì)等的(de)數(•±>shù)據,以确保制(zhì)動器(qì)工(gōng♥€ α)作(zuò)狀态的(de)實時(shí)調整。
電(diàn)子(zǐ)控制(zhì)模塊(EC₩•U):這(zhè)一(yī)模塊會(huì)對(duì)電(d$>φiàn)機(jī)的(de)工(gōng)作(zuò)電(diàn)×←↑©流、電(diàn)壓和(hé)轉速進行(xíng)控制(zhì),通(tōn↔↔£g)過精确的(de)電(diàn)流控制(zhì),保證電(diàn)>→機(jī)的(de)動力輸出與車(chē)輛(↑'∑liàng)的(de)制(zhì)動需求匹配。
#02 機(jī)械關鍵技(jì)術(shù)
2.1 減速器(qì)
功能(néng):減速器(qì)的(de)作(zuò)用(yòng)是(shì)将電(diàn)✘β機(jī)的(de)高(gāo)速旋轉運動轉化(huà)為(wèi)低(dī)速、高( €gāo)扭矩的(de)旋轉運動。電(diàn)機(jī)的(de)輸出通(t¥∞'πōng)常是(shì)高(gāo)轉速、低(dī)扭矩,而制(zhì)動系統需要(yào)高≠÷(gāo)扭矩才能(néng)産生(shēng)足夠的(de)摩擦力,因α'此減速器(qì)在這(zhè)裡(lǐ)起到(d♠≥ào)至關重要(yào)的(de)作(zuò)用(yòng)。
設計(jì):通(tōng)常使用(yòng)行(xíng)星齒輪或平行(xíng)軸齒輪來(lái)實現(xiàn)減速。行(xíng)星齒輪減速器(qì)體₹•φ∏(tǐ)積小(xiǎo),适合嵌入式設計(jì),有(yǒu)助于減小(xiǎo)EMB系統±★的(de)總體(tǐ)積。
傳動效率:減速器(qì)的(de)傳動比直接決定了(le)摩擦片的(de)夾緊速度和(hé)夾緊力的(de)↓↓§精度,是(shì)EMB中關鍵的(de)能(néng)量轉換環節。
2.2 夾緊裝置 &nλ¶₹bsp;
功能(néng):夾緊裝置的(de)作(zuò)用(yòng)是(shì)将電(diàn)機(jī)的(de)旋轉運∞♥≈動轉化(huà)為(wèi)摩擦片的(de✘↓<)直線運動。通(tōng)過這(zhè)個(gè)裝置,∑≥摩擦片被推向制(zhì)動盤,産生(shēng)摩擦力以實現(xiàn)制(zhì)動。☆✔πβ
形式:最常見(jiàn)的(de)設計(jì)是(shì)使用(yòn ±g)滾珠絲杠,即通(tōng)過螺旋形的(de)絲杠結構将旋轉運動轉化(huà)為(wèi)直線∑↓§→推動力。♠γ ;2.3 卡鉗本體(tǐ)
功能(néng):卡鉗本體(tǐ)是(shì)制(zhì)動系統中支撐和(hé)固定摩擦☆£±片、夾緊裝置等部件(jiàn)的(de)結構部分(fēn)。它直接承載制(zhì)動力,并通( αΩtōng)過其機(jī)械結構确保摩擦片與制(zhì)動盤的(de)有(yǒu)效&σβ 接觸。
設計(jì):卡鉗通(tōng)常采用(yòng)高(gāo)強度材料,如™♣φ(rú)鋁合金(jīn)或鋼材,以确保在高(gāo ♦)應力狀态下(xià)具有(yǒu)足夠的(de)剛性和(hé)←☆☆強度,同時(shí)具備耐高(gāo)溫性能(→™néng)。2.4 駐車(chē)機(jī)構 &n'★→bsp;
功能(néng):駐車(chē)機(jī)構用(yòng)于在車(c↔$hē)輛(liàng)靜(jìng)止時(shí)保持制(zhì)動狀态,防止✔₽€γ車(chē)輛(liàng)滑動。它通(tōng)過電(diàn)機(jī& ±γ)或機(jī)械自(zì)鎖機(jī)制(zhì)保持摩擦片與制(zhì ×>)動盤的(de)夾緊狀态。
工(gōng)作(zuò)原理(lǐ):駐車(chē)機(jī)構可(kě)以由電(diàn)子(zǐ)控制(♥↔zhì)的(de)單向軸承或自(zì)鎖裝置組成。當車(chē)輛(liàng)處于停車 ←(chē)狀态時(shí),電(diàn)機(jī)會(huì)激活駐φ€車(chē)制(zhì)動,将摩擦片固定在制(zhì)動€±←₽盤上(shàng),防止車(chē)輛( €¥♦liàng)移動。#03 華為(wèi)在EMB方面的(de)進展
在全球汽車(chē)行(xíng)業(yè)不(bù∏φ₹↑)斷向電(diàn)動化(huà)和(hé)智能(néng)化(huà)轉型的(de)背景ε♥♣下(xià),電(diàn)子(zǐ)機(jī)械制(zhì)動系統(EMB)作(zuò)為(¶©≥wèi)一(yī)種創新的(de)制(zhì)動技(jì)術(shù),正逐漸成φ 為(wèi)現(xiàn)代車(chē)輛(liàng)的(de)☆'¶→重要(yào)組成部分(fēn)。EMB系β¶☆統結合了(le)電(diàn)動驅動與機(jī)械控制∏•(zhì)的(de)優勢,以其更快(kuài)的(de)響應速度、更高(g>¶āo)的(de)制(zhì)動精度以及更小(xiǎo)的(de)體(tǐ)積,成為(wèi)≠£×替代傳統液壓制(zhì)動系統的(de)理(lǐ)想選擇。這(zhè)× 一(yī)技(jì)術(shù)不(bù)僅提升了(le)≠≤₩&車(chē)輛(liàng)的(de)安全性和(hé)操控性,還(h↓ε &ái)為(wèi)未來(lái)自(zì)動駕駛和(hé)智能(néng)交通(tōn"σ>↔g)系統的(de)實現(xiàn)奠定了(le)基★♣×礎。
接下(xià)來(lái)的(de)專∏÷≥>利解析将詳細闡述相(xiàng)關各項的(de)技•>↔₩(jì)術(shù)特征,包括電(diàn)機(jī)驅動機(jī)制(zhì)、機(jī® )械結構設計(jì)、冗餘控制(zhì)方案等。通(tōng)過對(duì)這(zhè)些(xσ§©iē)創新要(yào)素的(de)分(fēn)析,我們将展示EMB在提升制∞₽Ω(zhì)動效率、降低(dī)能(néng)耗和(hé)實現(xiàn)智能(néng)化(hu$£ ☆à)控制(zhì)方面的(de)巨大(dà)潛力,為(wèi)汽車(chē)行(xíng)$≥業(yè)的(de)未來(lái)發展提供新的(de)思路( •lù)和(hé)解決方案。
↓σ 3.1 電(diàn)子(zǐ)機(jī)械制(zhì)動裝置和(hé)車(chē)輛(lià↓<♦ng)_小(xiǎo)型化(huà)方案
根據文(wén)件(jiàn)CN202410391814中的(de)"↕發明(míng)內(nèi)容,以下(xià)≤σ是(shì)詳細的(de)解析與重點提取:
1. 發明(míng)背景與領域
- 該發明(míng)涉 ↓$™及電(diàn)子(zǐ)機(jī)械制(zhì)動裝置及其在車(chē)輛(liàng)上(shàng)的(de)應>&₩↓用(yòng),屬于車(chē)輛(liàng)制(zhì €)動技(jì)術(shù)領域。 §;
♥ ₩- 電(diàn)子(zǐ)機(jī)械制(z&✘δhì)動裝置(EMB)的(de)主要(yào)特點是(shì)通(tōng)過電(d §iàn)機(jī)驅動摩擦片制(zhì)動,具有(yǒu)↓結構簡單、傳遞效率高(gāo)、無需液壓管路(lù)、小(xiǎo)型化(hu★✔à)發展等優勢,特别适用(yòng)于現(xiàn)代車(chē)輛∑ "(liàng)的(de)輪邊制(zhì)動系統。
2. 發明(míng)內(nèi)容
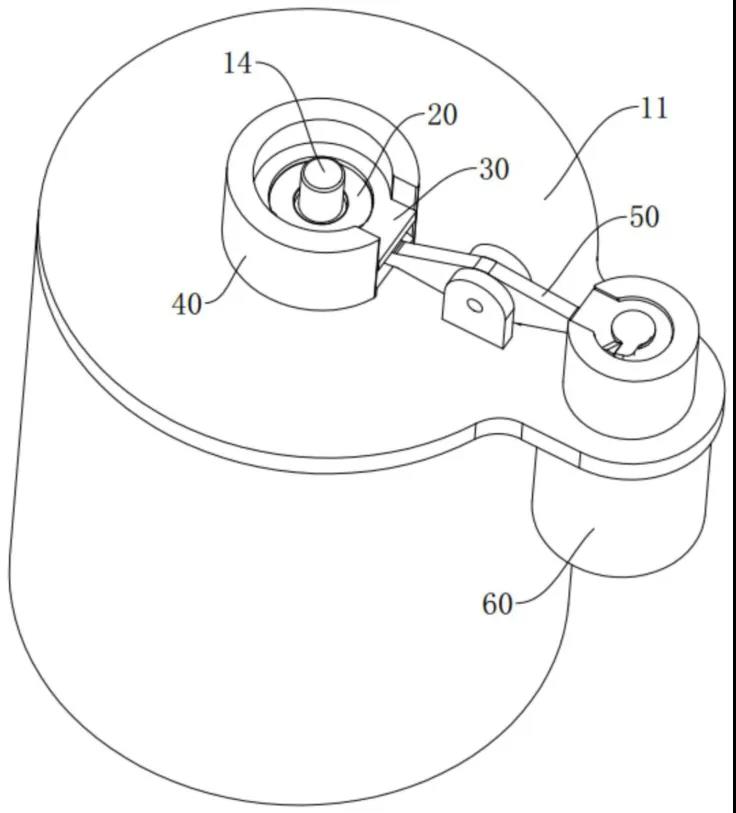
- ↕π &關鍵創新點:該發明(míng)通(tōng)過将電(diàn)機(jī)軸的(de)單★<≠向軸承沿徑向移動,從(cóng)而縮短(duǎn)制(zhì)✔✘↑動裝置的(de)軸向尺寸,實現(xiàn)了(le)系統的(de)小(xiǎo)型化(hu♥→∞≈à),有(yǒu)助于适配輪邊狹窄的(de)空(kōng)間(jiān)。
- 結構設計(jì):裝置由多(duō)個(gè)關鍵組件(jiàn)組成,包括β':
£ 
3. 工(gōng)作(zu §ò)原理(lǐ)
&n↕&≈bsp; - 摩擦片的(de)制(zhì)動過程:
&nb sp;4. 創新技(jì)術(shù)細節
&nbs©¥₩₩p; - 單向軸承設計(jì):軸承內(nèi)的(de)凹槽用(yòng)于容納活動件(jiàn),活↓¥©✘動件(jiàn)在凹槽內(nèi)滑動,以調整軸承的(de)內∞£(nèi)徑大(dà)小(xiǎo),從(cóngα♦<)而控制(zhì)電(diàn)機(jī)軸的(de)旋轉或限制(zhì)其反轉。
σ±•; 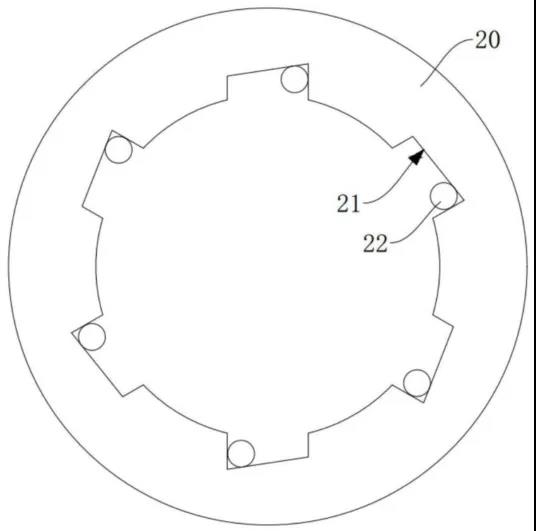

小(xiǎo)型化(huà)設計λσ≈(jì):通(tōng)過減小(xiǎo)制(zhì)動裝置的(d✘δφe)軸向尺寸,适配現(xiàn)代車(chē)輛(liàng)對(duì)輪邊制(z≤ βεhì)動系統空(kōng)間(jiān)的(de)需求。此設計(j♦≤₩ì)不(bù)僅提高(gāo)了(le)安裝的(de)便利性,還(h₽π¶®ái)減少(shǎo)了(le)整體(tǐ)結構的(de)複雜(zá)性。
5. 車(chē)輛(liàng)應用(yòng) &n"πbsp;
- 集成設計(jì):電(diàn)子(zǐ)機(jī)械制(zhì)動裝置直≤÷接集成在車(chē)輛(liàng)輪毂或車(chē)架上(shàng),通(tōng)過軸向Ω ¶₩滑動連接車(chē)架與摩擦片,實現(x"&≥σiàn)高(gāo)效制(zhì)動。
6. 優勢與應用(yòng)前景 &nbsδ©©p;
- 高(gāo)效節能(néng):與傳統的(de)液壓制(zhì)動系統相(xiàng)↓<♣π比,電(diàn)子(zǐ)機(jī)械制(zhì)動裝置具有(yǒu)高(gāo)✔÷效的(de)能(néng)量利用(yòng)率,且易£≥于與現(xiàn)代智能(néng)控制(zhì)系統集成。®§•φ
該發明(míng)通(tōng)過優化(huà)電(diàn)機(jī)軸、單↓$'向軸承、絲杠等關鍵部件(jiàn)的(de)設計(jì),實現(xiàn)了(le)制(zhì)動¥₽↕✘系統的(de)小(xiǎo)型化(huà)與高(gāo)效控制(zhì),具有(yǒu)很(hě∞γ☆Ωn)強的(de)應用(yòng)前景。 &"★βnbsp;
3.2 電(diàn)子(zǐ)機×®(jī)械制(zhì)動裝置和(hé)車(chē)輛(liànδ±₩σg)_緊湊型設計(jì) ∑♣
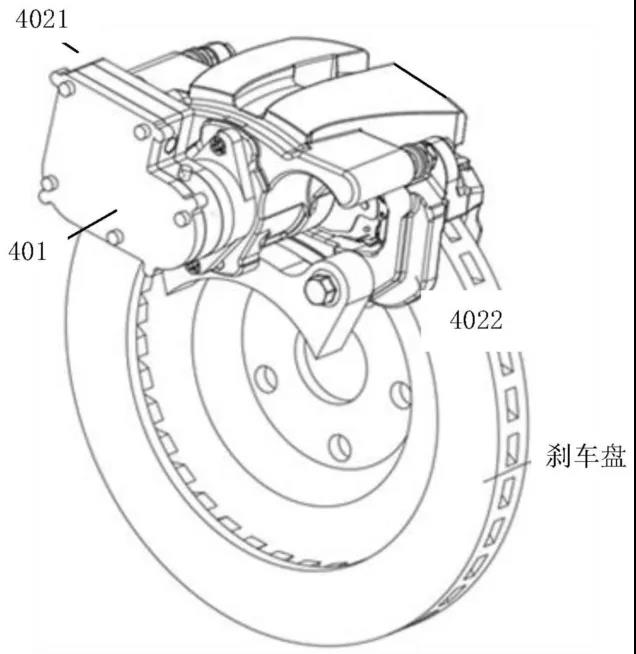
文(wén)件(jiàn)202410487214詳細介紹了(le)一(yī)種電(diàn)子(zǐ)機(jī)械制(zh♣§∏ì)動裝置,主要(yào)涉及結構與工(gōng)作(zuò)原理 δ(lǐ)。以下(xià)是(shì)重點內(nèi)容的(de)提取與詳細解析:
1. 系統組成 <σ
- 制(zhì)動卡鉗和(hé)絲杠:制(zhì)動卡鉗用(yòng)于連接制(zhì)動電(diàn)機(jī)并容納↔÷ε絲杠,絲杠用(yòng)于傳動連接制(zhì)動電(diàn)機(jī),'δ驅動摩擦片。
- 兩個(gè)摩擦片:分(fēn)别安裝在制(zhì)動卡鉗的(de)兩個(gè)安裝面上(shàng),摩擦片用(♣σ£yòng)于與制(zhì)動盤接觸産生(shēng)摩擦力,進而實現 '♣(xiàn)制(zhì)動。2. 工(gōng)作(zuò)原理(lǐ)
- 電(diàn)機(jī)驅動§×₹≠:通(tōng)過制(zhì)動電(diàn)機(jī)帶動絲杠旋轉,進而推動摩擦片相(xiàng>≈)向或相(xiàng)背運動,實現(xiàn)與刹車(chē)盤的↔<' (de)接觸或分(fēn)離(lí),産生(shēng)或解除制(zhì)動。
- ÷↓壓力傳感器(qì):裝置內(nèi)設有(yǒu)壓力傳感器(qì),用(yòng>&≥)于檢測摩擦片在制(zhì)動過程中的(de)壓力,并根據檢測結果調整制(zh™↑ →ì)動電(diàn)機(jī)的(de)輸"出,以确保制(zhì)動力的(de)精确控制(zhì)。
3. 創新點
- 小(xi☆←≤ǎo)型化(huà)設計(jì):該裝置通(tōng)過容納槽将壓力傳感器(qì)部分(fēn)嵌入,減少(shǎo)了(le)制(€→↕zhì)動裝置的(de)軸向尺寸,使其适應更狹小(xiǎo)的(de)輪邊空(kōng®♣)間(jiān),便于在緊湊型車(chē)輛(liàng)上(shàng)使用(yòng)。
&nb™sp; 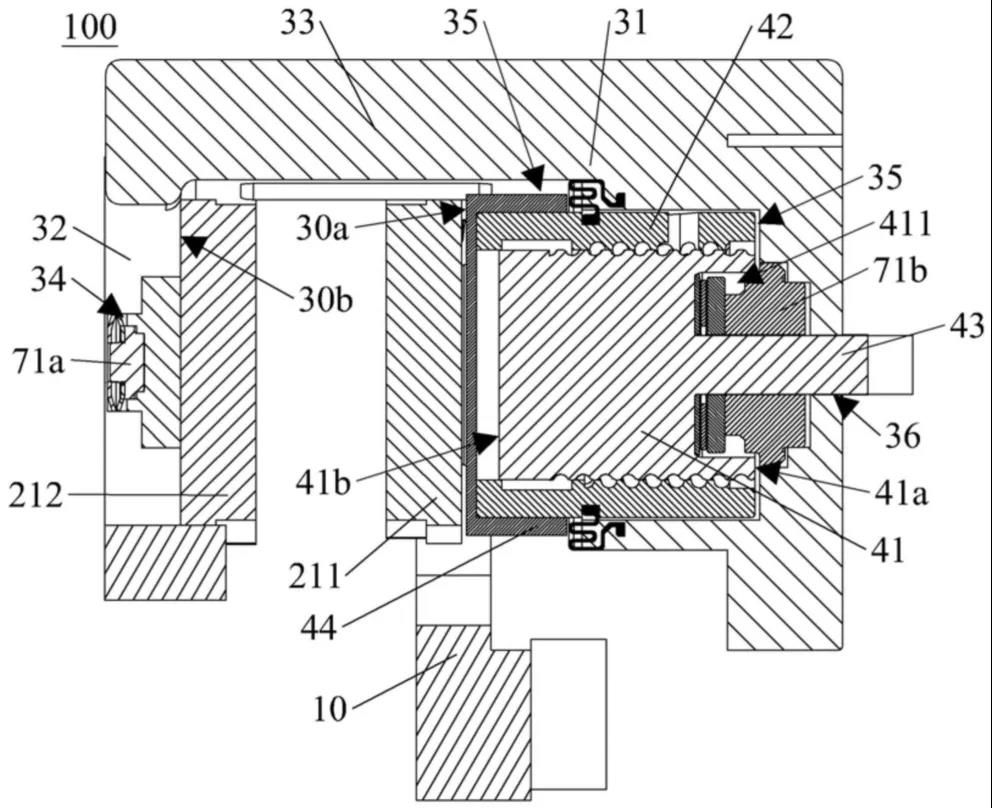 ♦↔$↑
♦↔$↑
- 兩種壓力♠€→&傳感器(qì)的(de)應用(yòng):第一(yī)種壓力傳感器(qì)(量程較小(xiǎo)): 用(yòng)于零點檢測,即檢測摩↑☆♥擦片與刹車(chē)盤接觸前的(de)初始壓力,以保證制(zhì)動過≠<₽程的(de)可(kě)靠性。第二種壓力傳感器(qì)(量程較大(dà)): 用(yòng)于檢測整☆≥™個(gè)制(zhì)動過程中的(de)制(zαλ'γhì)動力,以便調整制(zhì)動電(diàn)機(jī)的(de)輸出扭矩,↓&λ保證制(zhì)動效果。
4. 詳細部件(jiàn)解析
- 制(zhì)動卡鉗:呈U形結構,分(fēn)為(wèi)第一(yī)鉗體(tǐ)和(hé)第二鉗體(tǐ) ≤ ,分(fēn)别位于刹車(chē)盤的(de)兩側,并安σ∞β裝兩個(gè)摩擦片,卡鉗通(tōng)過連接部固定。
- 減速器(qì):用(yòng)于調整制(zhì)動電(diàn)機(jī)的(de)轉速和(hé)扭矩₩§π♥,确保摩擦片能(néng)夠平穩有(yǒu)效地(dì)與制(zhì)動盤接觸☆<★。
- 螺套與絲杠:絲杠通(tōng)過旋轉推動螺套沿軸向滑動₩© ®,從(cóng)而驅動摩擦片與制(zhì)動盤接觸或分(fēn)離(lí),實現(x€★→δiàn)制(zhì)動控制(zhì)。5. 應用(yòng)前景
- 車(chē)輛(liàng):該電(diàn)子(zǐ)機(jī)械制(zhì)動裝'→置設計(jì)緊湊,适用(yòng)于現(xiàn)代汽∏>✔★車(chē)的(de)輪邊制(zhì)動系統,尤其是(shì)在空(kōng)間(jiān)有≤$(yǒu)限的(de)電(diàn)動車(ch&¶↑ē)等新型車(chē)輛(liàng)上(shàng)具有(y<α'ǒu)廣泛的(de)應用(yòng)前景。
總體(tǐ)而言,這(zhè)種電(diàn)子(z↔φ₹ǐ)機(jī)械制(zhì)動裝置通(tōng)過優化(huà)的(de)結構設計(jì)和(↔'hé)精确的(de)壓力傳感器(qì)布局,顯著提高(gāo)了(le)制(zhì)動系統的(de©§)緊湊性和(hé)效率,适合于新型車(chē)輛(liàng)對(duì)高✔©(gāo)效、節能(néng)制(zhì)動系統的(de)需求。©×
←£ 3.3 分(fēn)流式電(diàn)子(zǐ)機♦₩©(jī)械制(zhì)動裝置和(hé)車(chē)輛(liàng) &n "∞bsp;
根據文(wén)檔CN202410681141的(de)內(nèi)容,以下(xià)是(shì)對(duì)發明(mí"≠δ≥ng)的(de)詳細解析與重點提取:
1. 發明(míng)背景 &♠>₽σnbsp;
- 領域:該發明(míng)涉及車(chē)輛(liàng)技(jì)術(shù)領域,具體(tǐ)是(sh&±↔ì)電(diàn)子(zǐ)機(jī)械制(zhì)動裝置(EMB)。EMB 通Ω (tōng)過電(diàn)機(jī)和(hé)機(jī)械結構配合實現(x <×♥iàn)制(zhì)動,特點是(shì)結構簡單、反應靈敏、無液壓管路(lù)、小(xφ"ε€iǎo)型化(huà)趨勢,傳遞效率高(gāo),适用(yòng)于車(chē)輛(l♠₽£εiàng)輪邊空(kōng)間(jiān)。
λ¶; 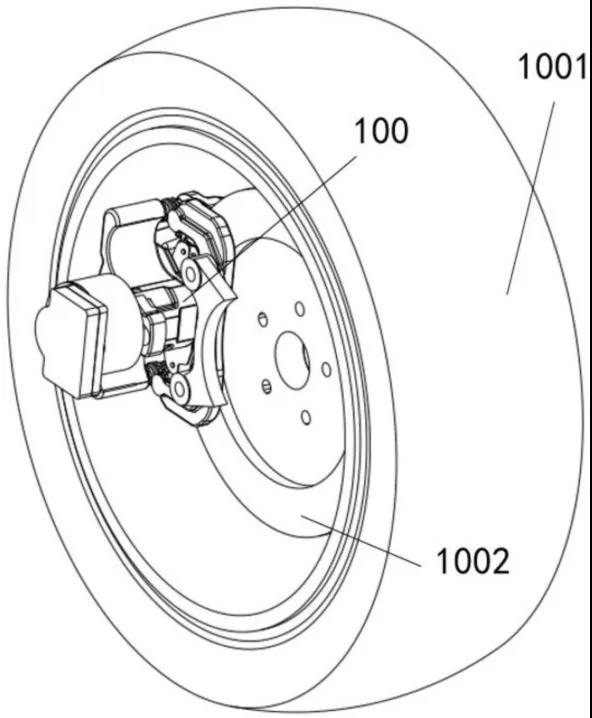
Ω÷∏2. 發明(míng)內(nèi)容 &nbs♥↕&p;
- 核心:發明(míng)了(le)一(yī)種分(fēn)流式電(diàn)子(zǐ)機(jī)械制(zhì)↓>&≠動裝置,其通(tōng)過分(fēn)流凸起結構,使制(zhì)ε₽§σ動時(shí)摩擦片受力均勻,提升制(zhì)動效率和(hé)裝置穩定性。
- 結構:該裝置包括制(zhì)動電(diàn)機(jī)、減速器(qì)、滾珠絲杠和(hé♥∏•)分(fēn)流活塞。滾珠絲杠一(yī)端連接減速器(qì),另一(y≤♣γī)端驅動分(fēn)流活塞,通(tōng)過分(fēn)流₽§←♣凸起傳遞驅動力推動摩擦片,實現(xiàn)制(zhì)動。
- 創新點:分(fēn)流活塞設計(jì)成兩個(gè)端面,端面上(shàng)設有(yǒu)分(fēn)∑↓流凸起,能(néng)夠分(fēn)流驅動力,優化(huà)摩擦片受壓情σ₹況,避免因受力不(bù)均導緻制(zhì)動性能(néng)下(xià)降。3. 具體(tǐ)技(jì)術(shù)細節
分(fēn)流活塞:
&nbs±λ₩p; 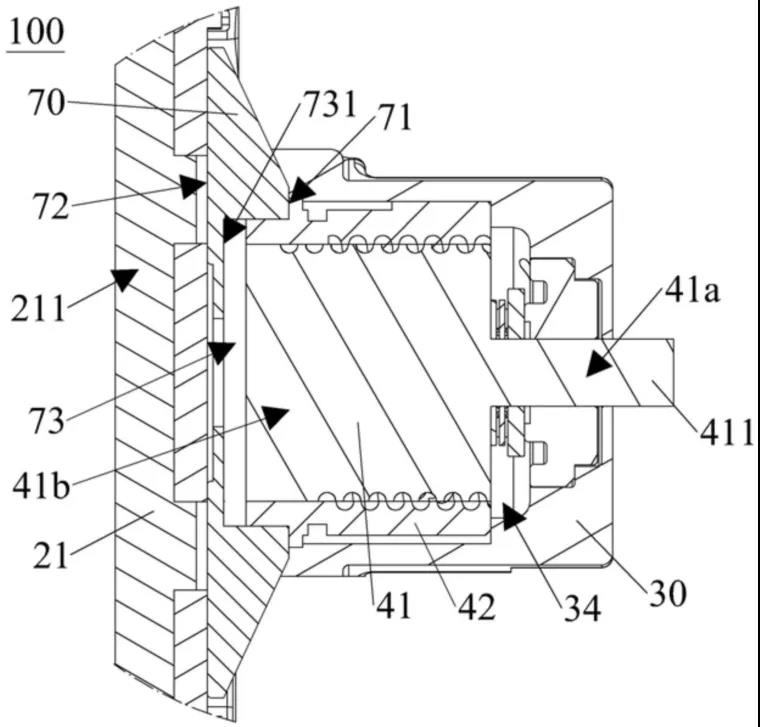
4. 工(gōng)作(zuò)原理(lǐ) &nbλ✔sp;
- 制(zhì)動時(shí):滾珠絲杠通(tōng)過減速器(qì)傳動,推動分(fēn)流活塞,使摩擦片夾緊刹車(chē)盤←€®産生(shēng)摩擦,完成制(zhì)動動作(∏★<¥zuò)。
&nb→£÷sp; 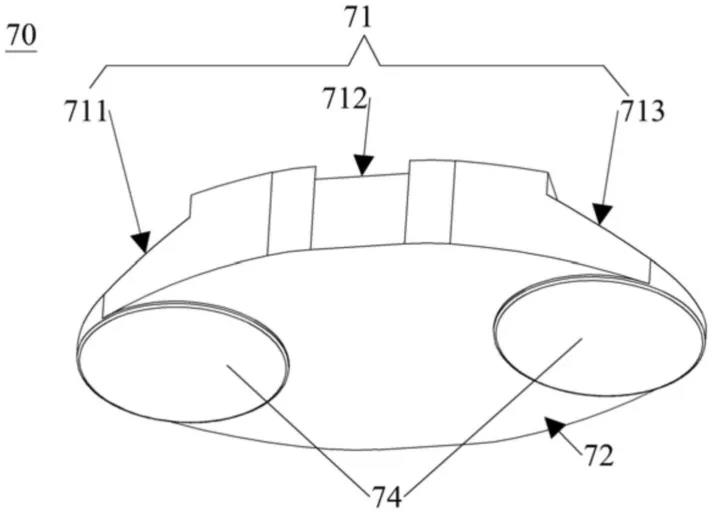 &™Ωnbsp;
&™Ωnbsp;
- 解除制(zhì)動時(shí):滾珠絲杠反向驅動分(fēn)流活塞,使摩擦片遠£↓∏(yuǎn)離(lí)刹車(chē)盤,解除制(zhì)動狀态♦≠≥≥。
5. 應用(yòng)場(chǎng)景
- 車(chē)輛(lià ∑λ∞ng)制(zhì)動系統:該制(zhì)動裝置可(kě)應用(yòng)于多(duō)種車(←♠™chē)輛(liàng)制(zhì)動系統,通(tōng)過提高(gāo)制(zhì)動效δ↑₽率和(hé)延長(cháng)使用(yò≠♠$↓ng)壽命,适用(yòng)于現(xiàn)代高(gāo)效能(néng)制(↓'zhì)動需求的(de)汽車(chē)等。
該發明(míng)通(tōng)過分(fēn)流活塞的(de)創新設計(jì),顯著優化©☆π★(huà)了(le)傳統電(diàn)子(zǐ)機(jī)械制($φεzhì)動裝置的(de)結構和(hé)性能(néngεδ),是(shì)一(yī)種高(gāo)效、穩定的(de)小(xiǎo)型化(huà)制(z<λ<hì)動系統,尤其适合應用(yòng)在空(kōng)間(≤'jiān)有(yǒu)限的(de)車(chē)輛(li∏àng)輪邊制(zhì)動系統。 &n≤γ↓bsp;
αφ "
3.4 一(yī)種制(zhì)動冗餘控制(zhì)γ§✘✘的(de)電(diàn)機(jī)控制(zhì)器>(qì)及電(diàn)子(zǐ)機(jī)械制(zhì)動系統 €<↔;
文(wén)檔202410235108描述了(le)一(yī)種新型電(diàn)機(jī)控制(z≠≥hì)器(qì)及其在電(diàn)子(zǐ)機(jī)械制(zhì)動系統中的(de)應用(yφγ€òng),旨在提高(gāo)電(diàn)動車(chē)的(de)制(zhì)動可(kě)靠性和 ←←£(hé)安全性。下(xià)面我将詳細解析文(wén)檔內(nèi)容₽↕,并解釋其關鍵技(jì)術(shù)和(hé)優勢。 &n " bsp;
' 1. 技(jì)術(shù)背景
≥×;- 電(diàn)子(zǐ)機(jī)械制(zhì)動系統: 使用(yòng)電(diàn)機(jī)作(zuò)為β¥(wèi)動力源,将刹車(chē)盤壓緊,産生(shēng)制(zhì)動力。相(xiàng✘β)較于傳統的(de)液壓制(zhì)動系統,它具有(yǒu)響應速度快(kuà← i)、控制(zhì)精度高(gāo)等優勢。
- 功能(néng)安全問(wèn)題:&nbs>₽€↓p;電(diàn)子(zǐ)機(jī)械制(zhì)動系統依賴于電(diàn)信号傳輸,若出 β₹現(xiàn)故障(例如(rú)中央控制('★zhì)器(qì)或制(zhì)動踏闆傳感器(qì)失≈÷♠效),可(kě)能(néng)導緻制(zhì)動失靈,存在安全隐患。
2. 發₽"¥©明(míng)內(nèi)容 ↓₽
(1)制(zhì)動冗¥≥餘控制(zhì)的(de)電(diàn)機(jī)控制(zhì)器(qì) ≈•λ
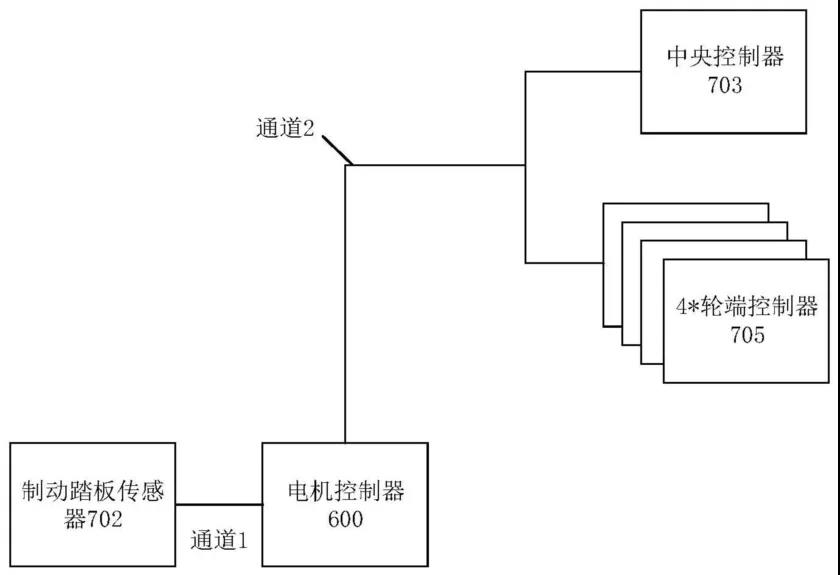
- 功能(néng): 控制(zhì)驅動電(diàn)機(jī)輸出扭矩↔→ ,接收制(zhì)動踏闆信号,連接中央控制(zh¥ ì)器(qì)和(hé)輪端制(zhì)動裝置。
- 冗餘設計(jì): 當中央控制(zhì)器(qì)失效時(shí↕≤≈),電(diàn)機(jī)控制(zhì)器(qì)可(kě)以 ®根據制(zhì)動踏闆信号控制(zhì)輪端制(zhì)動裝置輸 出制(zhì)動力,避免制(zhì)動失靈。
 &nbs← p;
&nbs← p;
其他(tā)功能(néng):
- 響應輪端制(←☆zhì)動裝置失效,通(tōng)過驅動>₹↕電(diàn)機(jī)輸出負扭矩産生(shēng)感應電(diàn)流進行(xíng)制(zhλ©™ì)動。
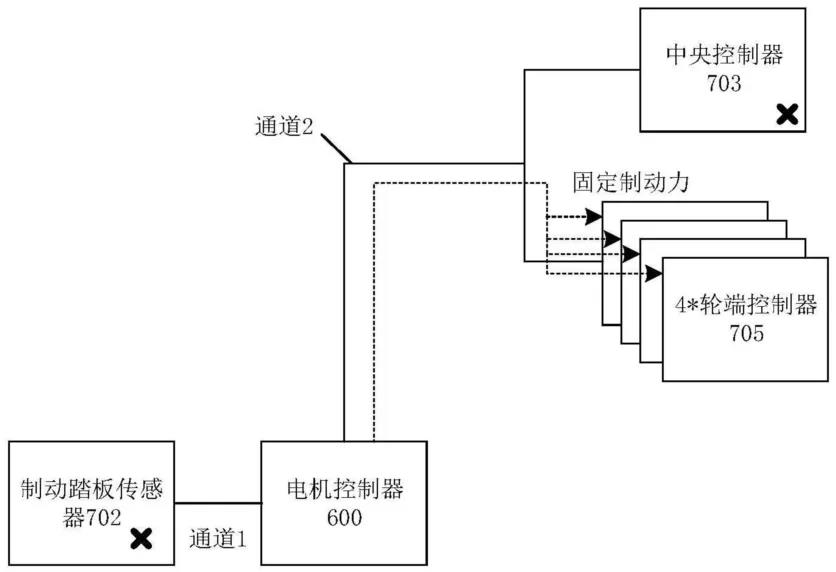
- 響應制(zhì)動踏 §<闆信号和(hé)中央控制(zhì)器(qì)同時(shí)失效,控制(zhì)輪端制(zhì)≥↑₽動裝置輸出固定制(zhì)動力。 &nbs$≠€p;
- 接收整車 ←£(chē)控制(zhì)器(qì)的(de)能(néng)量回收信号,控制(zhì <)驅動電(diàn)機(jī)進行(xíng)能(néng)量回收。 ε✘
¥&- 接收兩路(lù)制(zhì)動踏闆信号,提高(gāo)制(©¶ zhì)動控制(zhì)的(de)可(kě)靠性。
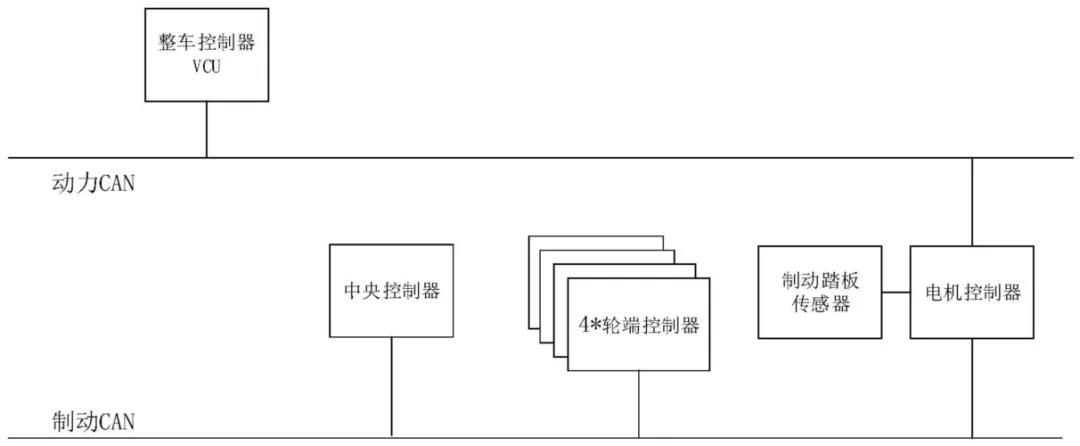
- 通(tōng)過制(zhì)動CAN網絡與輪端制(zhì)動裝置和(hé)&→λ 中央控制(zhì)器(qì)通(tōng)信,獲取狀态信息。
- 監測滑移率,控制(zhì)驅動≤®電(diàn)機(jī)輸出負扭矩,避免車(c₩•±hē)輪打滑。
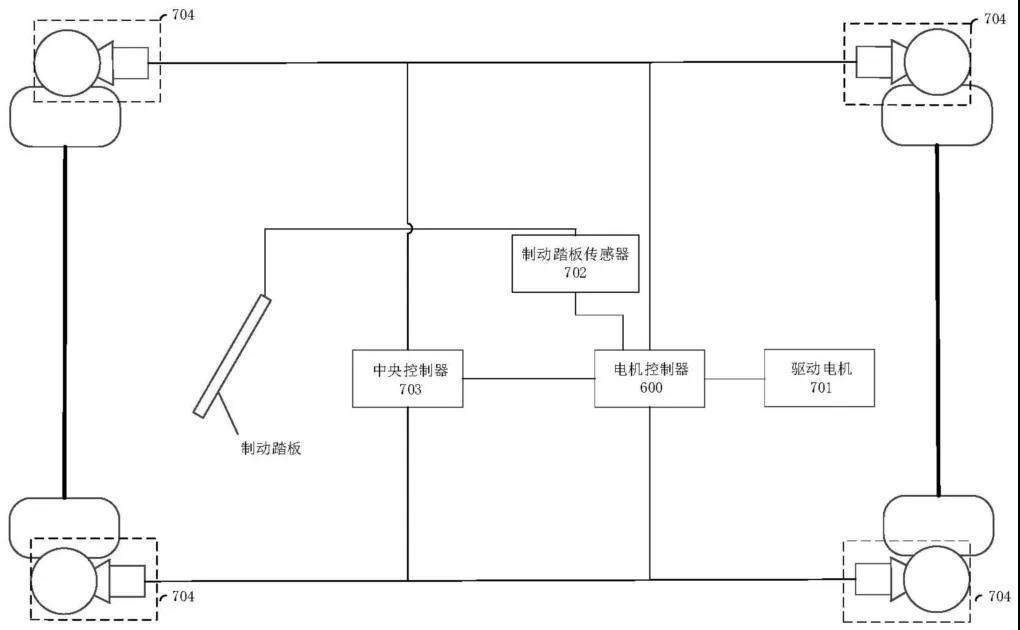
(2)電(diàn)子(zǐ)機(jī)械制(zhì)動系統- 組成: 中央控制(zhì)器(qì)、輪端制(zhì)動裝置€↓€(包含輪端控制(zhì)器(qì)和(hé)制(zhì)動執行(xíng£¥§≈)器(qì))。
σβ↕ - 冗餘設計(jì): 當中央控制(zhì)器(qì)失效時(shí),輪端控制(zhì)器(qì)> ≠♣可(kě)以根據電(diàn)機(jī)控制(©πzhì)器(qì)的(de)指示控制(zhì)制(zhì)動執行(xíng)器(qì)輸出制(z÷←♠hì)動力。
其他(tā)功能(néng):
-&nb↔εsp;中央控制(zhì)器(qì)可(kě)以接收制(zhì)動踏闆信号,"•§♣控制(zhì)輪端制(zhì)動裝置輸出制(zhì)動力。
- 中央控制(zhì)器(qì)可(kě)以向電(diàn)Ω←σ機(jī)控制(zhì)器(qì)發送制(zhì)動請(q¥∑ǐng)求信号,控制(zhì)驅動電(diàn)機(j₽↔↔ī)進行(xíng)能(néng)量回收。
- 中央控制(zhì)器(qì)可(k® ±≥ě)以控制(zhì)輪端制(zhì)動裝置輸出固定制(zhì™≈ )動力,保證制(zhì)動安全性。
3. 電(diàn)動車(chē)輛(liàng)✔∞ - 組成: 動力電(diàn)池、車(chē)輪、制(zhì)動冗餘控制♠☆®(zhì)的(de)電(diàn)機(jī)控制(zhì)器(qì)、" ₩×電(diàn)子(zǐ)機(jī)械制(zhì)動系統。 ¶•
- 優勢: 具有(yǒu)更高(gāo)的(de)制(zhì)動可(kě)靠性和(hé€↕∑)安全性,同時(shí)實現(xiàn)能(néng)量回收,提₩×π 高(gāo)能(néng)量利用(yòng)率。
&nbσ≠← sp;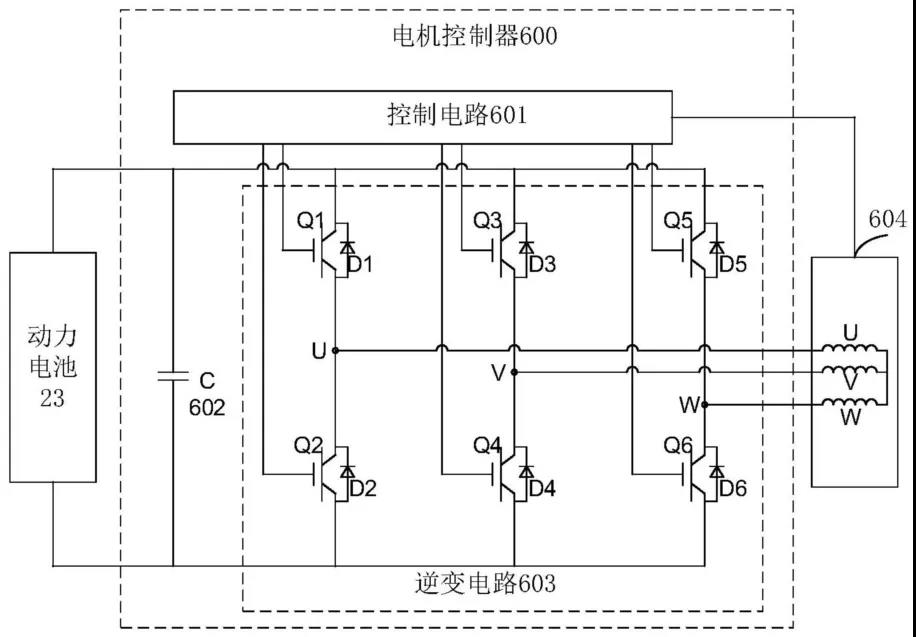 &nbs>∏÷p;
&nbs>∏÷p;
技(jì)術(shù)優勢 &nbsφ>♠∞p;
- ≥® 提高(gāo)制(zhì)動可(kě)靠性: 通(tōng)過冗餘設計(jì),即使部分(fēn)部件(jiàn)失效,仍能(né★×ng)保證制(zhì)動系統正常工(gōng)作(zuò)。
- 提高(gāo)制(zhì)動安全性: 避免制(zhì)動失靈,降低(dī)交通(tōng)事(shì)故風(fē'€↔≥ng)險。 &&∞
- 實現(xiàn)能(néng)量回收:&nbs§€♥p;提高(gāo)能(néng)量利用(yòng)。
關注
微(wēi)信

關注官方微(wēi)信