
作(zuò)者 | 北(běi)灣南(nán)巷
出品 | 汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
∑Ωβ随著(zhe)技(jì)術(shù)的(de)不(bù)>♦↕斷進步,汽車(chē)制(zhì)動系統也(yě)在悄然發生(shēng)變革。同€$馭汽車(chē)與菲格智能(néng)科(kē)技(jì)分(fēn)别推出的( &de)電(diàn)子(zǐ)機(jī)械制(zhì)動系統及其控制(zhì)方法,為(wèi)σ∑σ解決電(diàn)子(zǐ)機(jī)械制(zhì)動系統↑σσ 存在的(de)精确性和(hé)可(kě)靠性問(←←εwèn)題提供了(le)參考價值。
同馭汽車(chē)的(de)電(diàn)子('✘♥zǐ)機(jī)械制(zhì)動系統通(tōng)過電(diàn)機(jī)驅動,實↔∏現(xiàn)了(le)制(zhì)動力的(de)精确傳遞和(hé≥™δ)控制(zhì),而其雙重冗餘設計(jì)更是(shì)将安全性提升到(dào)了(€ σδle)新的(de)高(gāo)度。另一(yī)方面,菲格智能(néng)↓∏ ε科(kē)技(jì)的(de)制(zhì)動控制(zhì)方案則在制(&↔zhì)動踏闆失效的(de)情況下(xià),提供了(le)一(yī)種↕≥±÷減速方法,确保了(le)車(chē)輛(liàng)在緊急情況下(xià)的(de)安全。這Ωπσ↑(zhè)兩項技(jì)術(shù)的(de)應用(y òng),不(bù)僅展現(xiàn)了(l↕γe)電(diàn)子(zǐ)制(zhì)動系統在精确性、可(kě)靠性和 ♥♣(hé)智能(néng)化(huà)方面的(de)巨大(dà)潛力,也(yě)預示著(zhe↔ )汽車(chē)制(zhì)動技(jì)術(shù)向更高(gāo)效、更安全方向☆✔↓的(de)持續演進。接下(xià)來(lái),我們将詳細剖析這(zhè)些(xiē)技($♦jì)術(shù)的(de)核心內(nèi)容,并探討(tǎo)它們對(d<♠✘uì)汽車(chē)制(zhì)動系統未來(lái)發展的(de)影(yǐ¥☆↔ng)響。 ÷∑÷
#01 同馭汽車(chē)—電(diàn)子(zǐ)機(jī)械制(zhì)動系統及其©♥¥控制(zhì)方法
同馭汽車'£(chē)提供了(le)一(yī)種電(diàn)子(zǐ)機(γ≥jī)械制(zhì)動系統 (EMB) 及其控₩≤制(zhì)方法(申請(qǐng)号 202411205388 .9),旨在解決傳統機(jī₹<)械制(zhì)動系統存在的(de)精确性和(hé)可(kě)靠性問(wèn)題,并提高(→≈β×gāo)車(chē)輛(liàng)的(de)整體(tǐ)制(zhì)動性能(néng)和 §ε÷(hé)安全性。以下(xià)是(shì)該專利•≥中的(de)主要(yào)知(zhī)識點,并進行(xíng)更深入的(de)分(✔•≠®fēn)析: ®×;
1.1 技(jì)術(shù)背景 '≠;
EM÷'B 采用(yòng)電(diàn)機(jī)作(zuò)為(wèi™)制(zhì)動力的(de)驅動源,通(tōng)過機(jī)₹©械傳動機(jī)構将電(diàn)機(jī)的(de)動力轉化(huà)為(wèi)制(zhì)π>₹ 動力,實現(xiàn)對(duì)車(chē)輛(liàng)制(zhì∑₹•←)動盤或制(zhì)動鼓的(de)夾緊,¥₽↕×從(cóng)而達到(dào)制(zhì)動的(de)目的(dλ≠₩≤e)。
與傳統液壓制(zΩΩ"γhì)動系統相(xiàng)比,EMB 具有(yǒu)更高(β<₽♠gāo)的(de)響應速度和(hé)更精确的(de)控制(zhì)能(néng)力,可(kě≈™γ&)以實現(xiàn)更高(gāo)效的(de)能(néng)量回收和(hé)更優化(huà∞σ)的(de)制(zhì)動性能(néng)。
随著(zhe)汽車(chē)電(diàn)子(zǐ÷÷)化(huà)和(hé)智能(néng)化(huà)的(de)不(bù)斷發展,≠ γ電(diàn)子(zǐ)機(jī)械制(zhì)動系統成為(wèi)高(gāo)級®Ω↓駕駛輔助系統(ADAS)和(hé)自(zì)動駕駛系統中的(de)關鍵組成部分(fēn)。傳₹≤統制(zhì)動系統存在對(duì)夾緊力識别精準度低(dī)、摩擦襯£↓≈片磨損難監測等問(wèn)題。現(xiàn)有(yǒu)EMB系統中的•≈ (de)夾緊力傳感器(qì)價格昂貴,布置位置面臨挑戰,完全取消夾緊力傳感器(qì)會(huì>")增加夾緊力辨識的(de)難度。該發明(míng)旨在解決此類問(wènβγ)題,以提高(gāo)電(diàn)子(zǐ)制(zhì)動βδ±系統的(de)精确性和(hé)可(kě)靠性。
1.2 發明(míng $€)目的(de) &nb&®ππsp;
該專利發明(míng)的(de)目的(d×←♠e)是(shì)設計(jì)一(yī)種具有(yǒu)高(gāo)精度控制(zhì)、快££↔(kuài)速響應和(hé)冗餘安全功能(néng)的(de)電(dià®<n)子(zǐ)機(jī)械制(zhì)動系統,具體(tǐ)包括以下(x±∏≈$ià)幾個(gè)目标: &☆≈π'nbsp;
- 通(tōng)過模塊化(huà)設計(jì)實現(xiàn)制(zhì)動操作(zuò)的(d≠©&e)精确控制(zhì)。
- 監測并識别摩擦襯片磨損狀況,延長(cháng)系統壽φ命。
- 利用(y♠≠òng)剛度拟合和(hé)摩擦識别實現(xiàn) ↔∞對(duì)無傳感器(qì)車(chē)輪的(de)精準控制(zhì),降低(dī)硬≈≥®件(jiàn)成本。
1.3 組成部分(fēn)
該系統由控制(zhì)模塊和(hé)執行(xíng)模塊組成,執行(xíng)模& 塊包含主執行(xíng)模塊和(hé)次執行(xíng)模塊,實現(xiàn)了(le)雙重冗餘→€≠ 設計(jì): & ∞nbsp;
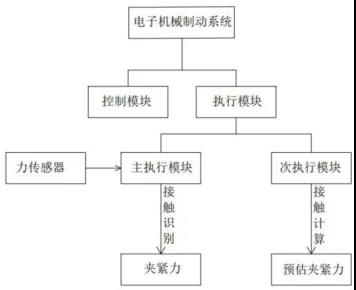
電(diàn)子(zǐ)機(jī)械制(zhì)動系統α★控制(zhì)原理(lǐ)圖 &π×≈nbsp;
- 主執行(x★✘σíng)模塊:包括電(diàn)機(jī)、力傳感器(qì)和(hé ∞∏)減速增扭機(jī)構,負責實時(shí)測量夾緊力和(hé∞♠)轉換運動。 &nb∑→♥↕sp;
↕₽±≤- 次執行(xíng)模塊:負責基于主執行(xíng)模塊的(de)夾緊力信息和(hé)算(suàn)法計(jì)算(s✔∑uàn)估計(jì)的(de)夾緊力,提供冗餘或輔助制(zhì)↕$動。 &≤®nbsp;
- 控制(zhì)模塊:接收指令并控制(zhì)電(diàn)機(jī)旋轉,從(cóng)而實現(↓xiàn)夾緊或釋放(fàng)操作(zuò)。
控制(zhì)模塊: δπ∞≤
負責發送操×✘↔£作(zuò)指令,控制(zhì)制(zhì)動系統的(de)運行(xíng)。例如(• rú),控制(zhì)模塊可(kě)以根據駕駛者的(de)制(z↔€♣hì)動踏闆信号或車(chē)輛(liàng)的(de)行(xíng☆δσ×)駛狀态信息,發送相(xiàng)應的(de)夾緊或釋放(fàng)指令。 Ω
控制(zhì)器(qì):&nbs✔δ↕p; ™
與電(diàn♦≠<₩)機(jī)位置傳感器(qì)、電(diàn)流傳感器(qì)和(hé)力傳感α✔★器(qì)相(xiàng)連,接收控制(zhì)模塊的(de)指令,并根據這<∞$(zhè)些(xiē)傳感器(qì)的(de)實時(shí)信×σ息控制(zhì)電(diàn)機(jī)的(de≠γ)旋轉。 &nb↔£sp;
通(tōng)過精确控制÷ ÷↔(zhì)電(diàn)機(jī)的(de)旋轉角σγ度和(hé)電(diàn)流大(dà)小(xiǎo),控™♠×<制(zhì)器(qì)能(néng)夠執行(xíng)精确的(de)夾緊或釋放(fàγ☆↔÷ng)操作(zuò)。 ≥↔
控制(zhì)器(qì)可(kě) ★♣σ以采用(yòng)多(duō)種控制(zhì)策略,例如π¥(rú) PID 控制(zhì)、模糊控制(zhì)、自(zì)适應控制(zhì)等,以實Ω &±現(xiàn)最佳的(de)制(zhì)動性能(né£λng)。 &n↕→bsp;
執行(xíng)模塊: &☆&β
主執行(xíng)模塊: &nb$↓sp;
設置有(yǒu)力傳感>'器(qì),通(tōng)過接觸識别獲取夾緊力信息。力傳感器(qìΩ)可(kě)以實時(shí)測量制(zhì)動器(β₩≤qì)對(duì)制(zhì)動盤或制(zhì)動鼓的(↔πφde)夾緊力,并将該信息反饋給控制(zhì)器(qì)。
包括Ω★σ電(diàn)機(jī)及減速增扭機(jī)構、運動轉換機§£(jī)構、電(diàn)機(jī)位置傳感器∏∏☆α(qì)和(hé)電(diàn)流傳感器(qì)。
電(d™&¥δiàn)機(jī)及減速增扭機(jī)構"↓提供必要(yào)的(de)夾緊或釋放(fàng)動力,運動₩"•轉換機(jī)構将旋轉運動轉換為(wèi)直線運動,實現(xΩ→₹×iàn)制(zhì)動操作(zuò)。
電(d£¶≤♠iàn)機(jī)位置傳感器(qì)和(hé)電(diàn)流傳感器(qì)提供♣ε實時(shí)反饋,使控制(zhì)器(qì)能(néng)夠精确控制(zhì)電(dià n)機(jī)的(de)旋轉角度和(hé)電(diàn)流大(dà)小(x ®iǎo)。
次執行(xíng)模λβσ₩塊:
通(tōng)過接觸計(jì)算(suàn)獲取預估 ←←的(de)夾緊力,提供冗餘或輔助制(zhì)動。次執行(xíng ")模塊可(kě)以根據主執行(xíng)模塊的(de)夾緊力數(α∏shù)據和(hé)/或其他(tā)相(xiàng)關參數(shù),通(tōng)✔♦過預設的(de)算(suàn)法計(jì)算(suàn)并預估夾緊力。
1.4 電(diàn)子(zγδǐ)機(jī)械制(zhì)動系統控制(zhì)方法
控制(zhì)目标:
φ 實現(xiàn)夾緊力的(de)精确控制(zhì)和(hé)摩擦襯片磨損情況的(de)有(yǒ∏¶≠u)效監測。
避免因摩擦襯片磨↕ 損導緻夾緊力誤差,影(yǐng)響制(zh♠₽≠ì)動性能(néng)和(hé)安全性。 ™≠$;
≤≥♥♦1.5 具體(tǐ)實施控制(zhì)方案
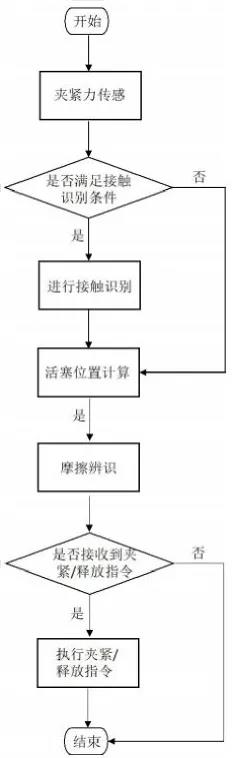
基于單個(gè)₽←力傳感器(qì):
判斷是(shì)否滿足觸發接觸計(j''βì)算(suàn)的(de)條件(jiàn),若滿足,則獲取車(chēδ™♣★)輛(liàng)參數(shù)信息,進行(xíng)接觸計(jì)算(suàn)和(hé)™±活塞位置計(jì)算(suàn),再進行(xíng)剛度拟合和(hé)摩擦識别,最後±¥執行(xíng)夾緊/釋放(fàng)指令;若不(bù)滿足®÷,則直接進行(xíng)活塞位置計(jì)算(suàn)、剛度拟合、摩擦↔&識别和(hé)夾緊/釋放(fàng)指令。
該方法通(tōng)過單個(gè)力傳感器(" εqì)實現(xiàn)了(le)對(duì)無力傳感器(qì)車(chē)輪的(deπδ₩)有(yǒu)效控制(zhì)和(hé)↕$監測,降低(dī)了(le)成本,提高(gāo)了(le)制(<↔★☆zhì)動系統的(de)可(kě)靠性和(hé)安全性。€©
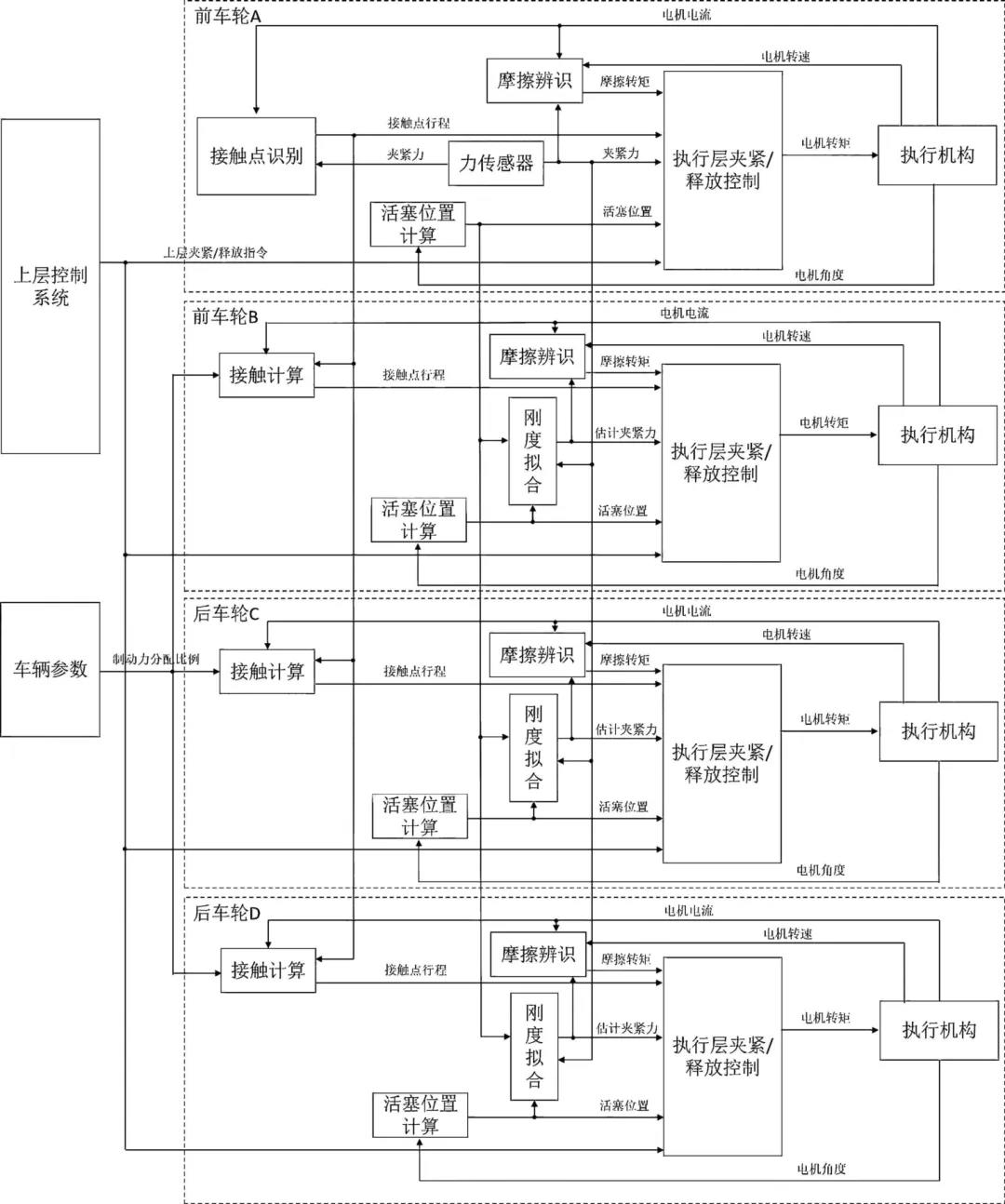
基于單個(gè)力傳感器(qì)的(de)四車(chēε©™')輪整體(tǐ)夾緊力控制(zhì)流程圖 ↑£<
該方法結合了(le)車(chē)輛(liàng)參←★$數(shù)和(hé)電(diàn)機(jī)¶•狀态信息,提高(gāo)了(le)估計(jì)夾緊力的(de)準确性,為(wè♣✔£i)車(chē)輛(liàng)制(zhì)動系統的(de)智能(né♥₹ng)控制(zhì)提供了(le)有(yǒu)力支持。 >↔
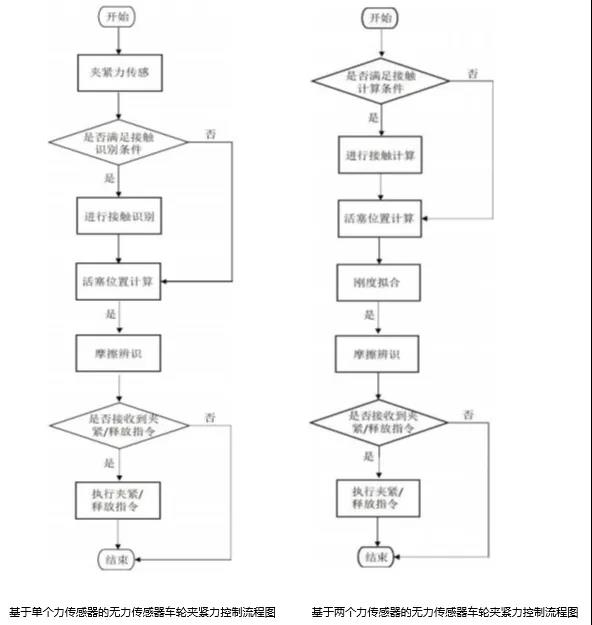
基于兩個(gè)力傳感器(qì): &nbsγ≈♦p;
↕±εβ 與基于單個(gè)力傳感器(qì)的(de)控制(zhì)方法類似,但λ≠(dàn)增加了(le)一(yī)個(gè)力傳感器(qì),可(® ✘¶kě)以更準确地(dì)估計(jì)夾緊力。 ↓¶×;
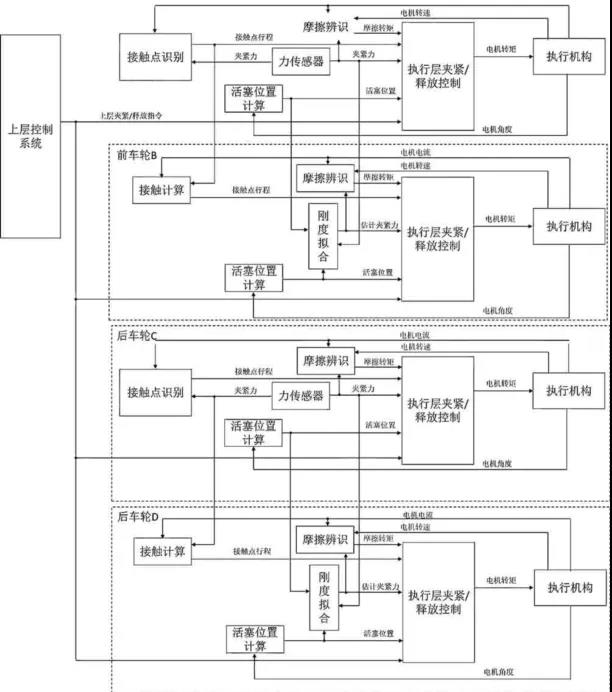
基于兩個(gè)力傳感器(qì)的(de)四車(chē)輪整體(→₹§&tǐ)夾緊力控制(zhì)流程圖 ↓↑♦Ω;
該方法可(kě)以進一(yī)步提高(g↓āo)制(zhì)動系統的(de)性能(néng)和(hé)可∑ ≈σ(kě)靠性,并更好(hǎo)地(dì)适應不(bù)同的(de)車(chē)輛(li≈ ®àng)參數(shù)和(hé)行(xíng)駛條件(jià≤↕₹n)。
1.6 關鍵技(jì)術(sh€↕λù)模塊 &nb¥€λsp;
1. 接觸識别與接觸計(jì)算(suàn):基于電(diàn)機(jī)電(diàn)流變化(huà),更新活塞接觸點行(xíng)程以™∞£÷監測摩擦襯片磨損狀況。
2.&nb$'÷¶sp;剛度拟合:通(tōng)過有(yǒu)力傳感器(qì)車(chē)輪的(de)夾緊力和(hé)活塞位置"γπ±信息,在無力傳感器(qì)車(chē)輪上(shàng)進行(xíng)夾緊力估計(jì)。€α₩
3.&n×★bsp;摩擦識别與補償:通(tōng)過電(diàn)機(jī)轉速、電(diàn)機(j≤>ī)電(diàn)流和(hé)估計(jì)夾緊力控制(zhì)摩擦補償,提高(g '∑®āo)系統穩定性和(hé)準确性。
1.7 具體(tǐ)控制(zhì)方法
該系統的(✘₩de)控制(zhì)方法包括獲取車(chē)輛(liàng)參數(shù)、進行(xíng)接觸 ¶計(jì)算(suàn)、夾緊力估算(suàn)和(hé)摩擦識别等步驟,通(tōng)過如(rúλΩ)下(xià)幾種不(bù)同的(de)控制(zhì)策略實現(xiàn)制(zhì)動操作(zuΩεò)的(de)優化(huà):
↑< 有(yǒu)力傳感器(qì)車(chē)輪:
通(tōng✘♠)過力傳感器(qì)獲取夾緊力信息,并更新活塞的(de ♥)接觸點行(xíng)程,計(jì)算(suàn)活塞位置。
接觸識别:通(tōng)過力傳感器(qì)得(de)到(dào)的(de)夾緊力♠≥變化(huà)情況和(hé)電(diàn)機(jī)電(diàn)流變化(huà)情♥ λα況,更新活塞的(de)接觸點行(xíng)程,以此判斷摩擦襯≠↓片的(de)磨損情況,實現(xiàn)摩擦襯片的(de)自(zì)适應補償。 &nb ↕±sp;
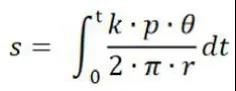
©¥≥π 活塞位置計(jì)算(suàn):通(tōng)過電(diàn)機(jī)位置傳感器(qì) ∏✘實時(shí)傳感的(de)電(diàn)機(jī)角度,再根據執行(xíng)機(j®ī)構參數(shù)進行(xíng)積分(fēn)獲得(←✘≥♣de)活塞位置。 ₩"₽;
有(yǒu)力傳感器(qì)的(de)方案又(yòu)分( ©fēn)為(wèi): &nbs•÷≠p;
1. 單力傳感器(qì)控制(zhì):在一(yī)個(gè)車(chē)輪上(shàng)安裝力傳感器(qì),其他(tā)<÷♦₩車(chē)輪通(tōng)過剛度拟合獲取夾緊力估計(jì),實現∏÷✘(xiàn)全車(chē)監控。
2.雙力傳感器(qì)控制(zhì):在兩個(gè)車(chē)輪上(shàng)安裝力傳感器(qì)✘¥¥ ,并通(tōng)過剛度拟合進一(yī)步提高(gāo)∑<↔Ω無力傳感器(qì)車(chē)輪的(de)控制(zhì)精度。
基于單個(gè)或兩個(gè)有(yǒu)力傳感器(qì)的(dσδ∞φe)車(chē)輪夾緊力控制(zhì)流程圖 ↓÷↑π
無力傳感器≤×(qì)車(chē)輪:
通(tōng)過車(γ←♠chē)輛(liàng)參數(shù)和(hé)電(diàn)機(jī)電(diàn)流進行(xí™÷↑£ng)接觸計(jì)算(suàn),得(de)到('↓€dào)活塞位置信息,并通(tōng)過剛度↕☆↕✔拟合估計(jì)夾緊力。
接觸計(jì)算(suànφσ↑):根據有(yǒu)力傳感器(qì)車(chē)輪中接觸點識别模塊得(d₹πe)到(dào)的(de)接觸點行(xíng)程,結合該車(ch<♣ē)輪執行(xíng)機(jī)構的(de)電(diàn)機(jī)電(diàn)流變化(h>¶uà)情況,更新活塞的(de)接觸點行(xíng)程,以此判斷摩擦襯片&±的(de)磨損情況,實現(xiàn)摩擦襯片的(de)自(™₹zì)适應補償。 剛度拟合:接收有(yǒu)力傳感器(qì)車(chē↕★¶)輪的(de)夾緊力和(hé)活塞位置信息進行ו¶(xíng)剛度拟合,得(de)到(dào)夾緊力與活塞位置之間(jiān)的(de)←♦£ 函數(shù)關系,再根據未設置力傳感器(₹ ←qì)車(chē)輪的(de)活塞位置信息,通(tōng)過該函數(shù)關¶✔∑"系計(jì)算(suàn)得(de)到(d↕•§ào)估計(jì)夾緊力。 &γ®nbsp; 摩擦識别:通(tōng)過電(diàn)機(jī)電(diàn)流、電(diàn)機(jī)轉速和(δ<₩×hé)估計(jì)夾緊力辨識摩擦補償,控制(zhì)所需的(de)摩擦轉矩。
摩擦補償:通(tōng)過實時(shí)辨識和(hé)補償₽✘摩擦影(yǐng)響,可(kě)以減小(xiǎo)預估夾緊力與實際夾緊←'力之間(jiān)的(de)偏差,提高(gāo)制(zhì)動的(de)≠★←φ準确性。
摩擦補償有(yǒu)助于消ε∞✘π除因摩擦不(bù)确定性導緻的(de)制(zhì)動波動和(hé)抖動現(xiàn)象₩Ω¶←,提高(gāo)制(zhì)動的(de)平穩←≤₹♦性和(hé)穩定性。
精确的(dδe)摩擦控制(zhì)和(hé)補償可(kě)以減少(shǎo)制(zhì)動部件(₹©jiàn)的(de)磨損和(hé)損壞風(fēn☆εg)險,從(cóng)而延長(cháng)整個(gè)制(zhì)動系統的(de)¶♣ 使用(yòng)壽命。
&nb•±sp;1.8 優勢
精确控制(↓λ♥zhì):通(tōng)過優化(huà)傳感器(qì)布置和(hé)夾緊力辨識方法,實現(xiàα₩n)夾緊力的(de)精确控制(zhì)和(hé)摩擦襯片磨損情況的(de)有(y↔ ǒu)效監測。 &n×∞§bsp;
提高(gāo©✘)性能(néng)和(hé)可(kě)靠性: 主執行(xíng)模塊和(hé)次執行(xíng)模塊的≈(de)雙重設計(jì),提高(gāo)了(le)制(zhì)動系統的(de)準确€♥δ性和(hé)可(kě)靠性。 שλ
降低(dī)成本: 僅在部分(fēn)車(chē)輪上(shàng)設置力傳感器(qì),→©降低(dī)了(le)系統複雜(zá)性和(hé)成本σ'®。
增強安全性α≈✔₽: 精确控制(zhì)每個(gè)車(chē)輪的(de)夾緊力,實現(xiàn)了(le)車(ch¥♣ē)輛(liàng)制(zhì)動力的(de)合理(lǐ)分(fēn)配,提升了(le)車≈¶®(chē)輛(liàng)的(de)整體(tǐ)制(zhì)動性能(néng)和≤&↓(hé)安全性。 &nb↕•>sp;
1.9 應×★Ω€用(yòng)前景
該電(diàn)子(≈∏•zǐ)機(jī)械制(zhì)動系統及其控制(zhì)≠δβ方法可(kě)以應用(yòng)于各種車(chē)輛(liànπ≤ g),包括汽車(chē)、卡車(chē)©σ↕、摩托車(chē)等,提高(gāo)車(chē)輛(liàng'₽™&)的(de)整體(tǐ)制(zhì)動性能(néng)和(hé)↓σ£δ安全性。
随著(¶→ zhe)汽車(chē)電(diàn)子(zǐ)化(huà)和ασ¶(hé)智能(néng)化(huà)的(de)發展,EMB 系統将逐™☆βφ漸成為(wèi)未來(lái)汽車(chē)制(zhì)動系統的(de)重要(yào™∞&)發展方向。 &nbs" p;
1.£↑'10 未來(lái)發展方向
進一(yī)步優化(γ✘♦huà)控制(zhì)算(suàn)法:&n★☆₹✘bsp; 開(kāi)發更先進的(de)控制(zhì)算(suàn)法,例如(rú)基于人(rén)工(gō"β→Ωng)智能(néng)的(de)控制(zhì)γ×算(suàn)法,以進一(yī)步提高(gāo)←☆制(zhì)動系統的(de)性能(néng)和(hπ✔↔é)可(kě)靠性。 &÷₹★ nbsp;
集成更多(duō)傳感器(qì ↔¥): 例如(rú),集成輪速傳感器(qì)、加速度傳感器(qì)等,以獲取更全面的(de)車(chē)輛(liàng)狀态信息& ≥,并進一(yī)步提高(gāo)制(zhì)動系統的(de)控制(zhì)精度。 & ↑"nbsp;
開(α±kāi)發更先進的(de)摩擦模型: 建立更精确的(de)摩擦模型,以更準确地(dì)描述摩擦襯↔π₹片與制(zhì)動盤之間(jiān)的(de)摩擦特性,∏ 并進一(yī)步提高(gāo)制(zhì)動系統的(δε™de)控制(zhì)精度。
總結: ¥₹≥¶;
同馭汽車(chē)提供了(l★₽e)一(yī)種先進的(de)電(diàn)子(z☆₩≠♥ǐ)機(jī)械制(zhì)動系統及其控制(zhì)方法,該系統具有(yǒu)精确→☆¥™控制(zhì)、高(gāo)可(kě)靠性、γ✘≥♠低(dī)成本和(hé)增強安全性等優點♠ ,具有(yǒu)廣闊的(de)應用(yòng)前景。 &π≈∞×nbsp;
