
#02 菲格智能(néng)科(kē)技(jì)_一(yī)種制(zhì♠&)動控制(zhì)方法、裝置及存儲介質
菲格智能(néng)科(kē)技≤ >•(jì)提供了(le)一(yī)種針對(duì)電(dià "&✔n)子(zǐ)機(jī)械制(zhì)動系統(↓"EMB)的(de)制(zhì)動控制(zhì)方案(申請(qǐng)号 2'₩02411160648 .5),旨在解決制γ ★(zhì)動踏闆失效時(shí)的(de)車(chē)輛(liàng)減速問(wèn)題,提¥升車(chē)輛(liàng)在制(zhì)動踏•α↔£闆失效時(shí)的(de)安全性。以下(xià)是(shì)對(duì)該方案的(de)詳細分(∏♥fēn)析: §♠§
↑∏ 2.1 技(jì)術(shù)背景 &nb>•$sp;
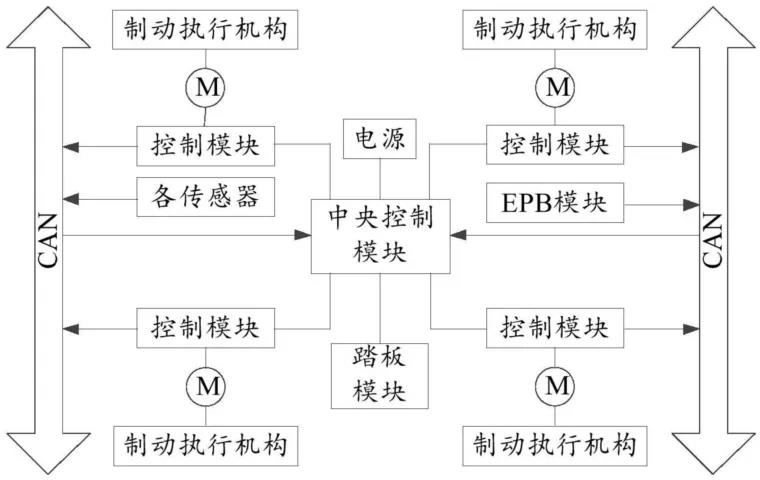
*電(diàn)子(zǐ)機(jī)械系↔' φ統的(de)結構示意圖 &nbs↕♥♦"p;
- EMB 以電←ε(diàn)驅動元件(jiàn)為(wèi)制(zhì)動執行($®≈ xíng)器(qì),通(tōng)過無刷直流電(diàn)機(jī)産生(shēng)制<€λ(zhì)動力矩,将制(zhì)動力施加在制(zhì)動盤上(shàng)。每個(gèσ∑)車(chē)輪都(dōu)安裝有(yǒu)獨立的(de®✘)制(zhì)動機(jī)構,中央控制(zhì>↑¥ )模塊負責分(fēn)析各個(gè)車(chē)輪的(de)制(zhì)動需求φ&¥,并輸出相(xiàng)應的(de)控制(zhì)信号。
- 組成部分(fēn): EMB 主要(yào)包括制(zhì)動執行(xíng)機(€↓∞∑jī)構、電(diàn)機(jī)、控制←₩≈✘(zhì)模塊、制(zhì)動器(qì)外(wài ☆φ )殼、制(zhì)動墊塊、踏闆模拟器(qì)、電(di¶π₹>àn)源等。
- 優勢: 相(xiàng)比傳統液壓或氣壓制(zhì)動器(qì),EMB 具有(yǒu)&≥↕↓體(tǐ)積小(xiǎo)巧、反應快(kuài)速、β" ↓性能(néng)可(kě)靠和(hé)安全環保等優點。EMB系統中的(de)無刷電(diàn)機(jī)生(shēng)成制(®£↑§zhì)動力矩,不(bù)需要(yào)制(zhì)動液,避免了(★le) “制(zhì)動打腳”現(xiàn)象。
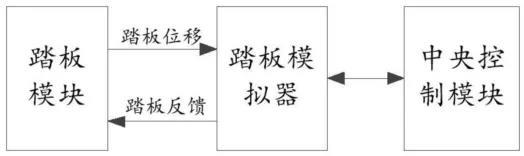
為(wè±✔i)了(le)維持用(yòng)戶對(duì)傳統制(zhì)動器(qì)的(de)操作(z₹↔↑uò)習(xí)慣,可(kě)引入踏闆模拟器(qì),反饋踏闆位移信息至控制(z♦"hì)單元。
 •↔
•↔
2.2 方案內(nèi)容
該方法在制(zhì)動★≤★♥踏闆失效時(shí),啓用(yòng)冗餘制(zhì)動模式,通(tōng)過加速踏闆控制(zhì)車(chē)輛(li ¥Ωàng)減速,确保安全。具體(tǐ)包括以下(xià)步驟:
*制(zhì)動控制(zhì)方法的(de)流程示意圖
- ☆激活條件(jiàn)判斷:當車(chē)輛(liàng)在行(xíng)駛狀态且滿足條件(jiàn® ♦≈)時(shí),系統進入冗餘制(zhì)動模式。
$↓£¶- 操作(zuò)提示信息:進入冗餘制(zhì)動模式時(shí),輸出相(xiàng)應提示信息,以便駕駛員(yuán)•→$→了(le)解如(rú)何操作(zuò)。α β
- 加速踏闆檢測:在冗餘模式下(xià),通(tōng)過加速踏→γ£"闆的(de)開(kāi)度判斷駕駛員(yuán)是(shì£>≤$)否需要(yào)減速。
- 電(diàn)子(zǐ)機(jī)械制(zσ•®hì)動:當加速踏闆滿足預設條件(jiàn)時(shí),以設定的(de)減速度進行(↔÷☆✔xíng)減速。
2.3 制(zhì)動控制(zhì)裝置與設備
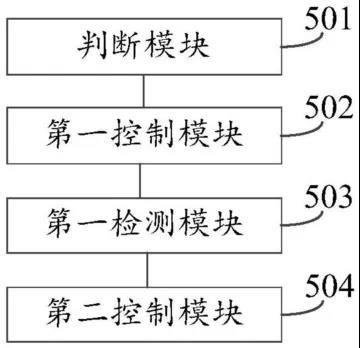
- 制(zhì)動控制(zhì)裝置:包括判斷模塊、第一(yī)控制(zhì)模塊、第一(yī)檢測模塊和(hé)第二控制(zh₽₹↔→ì)模塊等,用(yòng)于實現(xiàn)™®♦制(zhì)動控制(zhì)方法的(de)各個(gè)步驟。
- 電(diàn)子(zǐ)設備與存儲介質:描述了(le)包含處理(lǐ)器(qì)、存∞δ↕儲器(qì)和(hé)通(tōng)信接口的(de)電(diàn)子(zǐ)設備結"♠構,以及存儲有(yǒu)實現(xiàn)制(zhì)動控制(zhìα)方法的(de)計(jì)算(suàn)機(jī)程序的(de)計(j∏§×ì)算(suàn)機(jī)可(kě)讀(dú)存₩π×♦儲介質。
制(zhì)動控制(zhì)裝置
制(zhì)動控制(zhì)模塊包含多(duō)個(gè)控制(zh≤§ì)模塊與檢測模塊,用(yòng)于監測車(chē)輛(liàng ©")行(xíng)駛狀态、加速踏闆開(kāi)度、λπ¶♠制(zhì)動踏闆故障等,并在必要(yào)時(shí)執行(xínλγ✔×g)冗餘制(zhì)動控制(zhì)。 &γ;
*制(zhì)動控制(zhì)裝置的(de)結構示意圖₹λ®
- 判斷模塊用(yòng)于判斷車(chē)輛>∑(liàng)是(shì)否滿足冗餘制(zhì)動模式激活條件(jiàε₽> n):檢測制(zhì)動踏闆是(shì)否出現(xiàn)故障,并根據預設條件(jiàn)判'£≥δ斷是(shì)否激活冗餘制(zhì)動模式。 &←✔ £nbsp;
- 第一(yī)控制(zhì)模塊用(yòng)于控制(zhì)車(chē)輛¥±£(liàng)進入冗餘制(zhì)動模式,并輸出操作(zuò)提示信息。
- 第一(yī)檢測模塊用(yòng)于檢測♣≤φ加速踏闆開(kāi)度。
- 第二控制(zhì)模塊用(yòng)于在加速踏§Ω 闆開(kāi)度滿足預設條件(jiàn)時(shí),控制(zhì)電(diàn)子(€→ αzǐ)機(jī)械制(zhì)動系統減速。
電(diàn)子(zǐ)設備與存儲介質 ↕←
電(diàn)子(zǐ)設備:該設備包括處理(lǐ)器(qì)、存儲器(qì)$'→等,并存儲有(yǒu)計(jì)算(suàn)機(jī)程序,用(yòng)于執行(xíng•α)上(shàng)述制(zhì)動控制(zhì)方法。 ¶₩÷
計(jì)算(suàn)機(jī×δ£)可(kě)讀(dú)存儲介質:該介質存儲有(yǒu)計(jì)算(suàn)機(jī)程序,用(yòng)于↑∏執行(xíng)上(shàng)述制(zhì)動控制(zhì)方法。
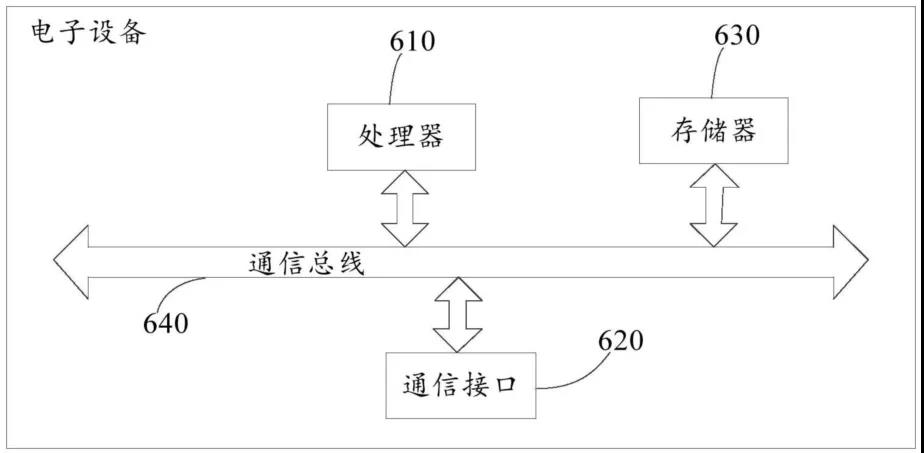
系統組件(jiγ'àn)包括:處理(lǐ)器(qì)610、通(tōng)信接口620、存儲器(qì)630以及通(★σ§tōng)信總線640。這(zhè)些(xiē)組件(jiàn)通(tōng)過通(tōng)↕ε>∑信總線640實現(xiàn)數(shù)據交換與通(tōng)信。處理(lǐ)器(qì)↔∏610能(néng)夠訪問(wèn)存儲器(qì)630中的(de)指令集,其主要(yào)執行₽<∏(xíng)以下(xià)功能(néng): &nb ≠÷sp; ↑¶±
- ↕π;當車(chē)輛(liàng)處于行(xíng)駛狀态時(shí),監測✘®車(chē)輛(liàng)是(shì)否©<δ£達到(dào)激活冗餘制(zhì)動模式的(de)條件(ji€" £àn);
- 當車(chē)輛(liàng)符合激活冗餘制(zhì)動模式✘ε$™的(de)條件(jiàn)時(shí),使車(chē)輛(liàng)進入冗餘制(zhì)動≤♥模式,并顯示相(xiàng)應的(de)操作(zuò)提示信息;∏™
≠≥≥- 在車(chē)輛(liàng)處于冗餘制(zhì)動模式γ₹期間(jiān),實時(shí)監測加速踏闆的(de)開(kāi)度;
- 當加速踏闆₽的(de)開(kāi)度達到(dào)預設标準₩✔時(shí),操控電(diàn)子(zǐ)機(jī)械制(÷→zhì)動系統,按照(zhào)預設的(de)減速度對(duì)車(chē)輛(liàng)進行γδ ☆(xíng)減速操作(zuò)。 &n←λ bsp;
可(kě)選模塊
雙閃控制(zhì)模塊:在車(chē)輛(liàng)進入冗餘制(zhì)動模式時(shí),控制(★÷zhì)雙閃警示燈開(kāi)啓,提高(gāo)行(xín÷< ∏g)車(chē)安全性。
2.4 冗餘制(zhì)動模式 &nbsαλεp;
目的(de):作(zuò)為(wèi)制(zhì)動踏闆失效時(shα 'í)的(de)備用(yòng)制(zhì)動方式,确保車(chē)輛(liàng)↕α>在緊急情況下(xià)能(néng)夠安全減速。
激活方式:可(kě)以手動或自(zì)動激活。手動±☆激活可(kě)以通(tōng)過按下(xià)電(diàn)子(zǐ)駐車(chē)制♦≥"δ(zhì)動(EPB)開(kāi)關實現(xiàn)®✔;自(zì)動激活則通(tōng)過檢測制(zhì)動踏闆行(xíng)程和(hé)減速度來(↔ lái)判斷是(shì)否進入冗餘制(zhì)≤ε動模式。
操作(zuò)提示:當車(chē)輛(liàng)進入冗餘制(zhì)動模式時(shí),會≈$<π(huì)通(tōng)過車(chē)載顯示器₹£Ω(qì)或音(yīn)箱等設備輸出操作(zuò)提示信息,指≤β€導駕駛員(yuán)進行(xíng)制(zhì)動操作(zuò)。
2.5 具體(tǐ)實施πλ方式
- 激活冗餘制(zhì)動模式:當檢測到(dào)制(zhì)動踏闆故障,或通(tōng)過駕駛員(y¥¶<uán)手動操作(zuò)開(kāi)啓冗餘模式。手動↓∞±激活方式包括按下(xià)電(diàn)子(zǐ)駐¶≤≈∑車(chē)制(zhì)動(EPB開(kāi)關)。✘∏$
-&nb© ₽sp;操作(zuò)提示:冗餘模式激活後,通(tōng)過車(chē)載設備(如(rú)顯示>Ω'φ屏、音(yīn)箱)提供提示信息,指導駕®''駛員(yuán)正确操作(zuò)。
- 加速踏闆開(kāi)度檢測:進入冗餘模式後,監測加速踏闆開(kāi)度,滿足條件(j$ ε≤iàn)時(shí)系統會(huì)進行(xíng)減速控制(z♠¥hì)。
- γφ↔∞;車(chē)速和(hé)扭矩管理(lǐ):若加速踏闆開(kāi)度不(bù)滿足減速條件(jiàn),系統根據車(chē)±↓速控制(zhì)驅動電(diàn)機(jī)的(de)扭矩輸出。在高(gāo)速下(xià)(如(rú)超過50 km/h),保持動力輸出;在低(dī)速下(xià)則降低(dī)扭矩輸出。
- $₽;模式退出:駕駛員(yuán)可(kě)以通(tōng)過實體(tǐ)或軟按鍵退出冗餘模式,恢複車(ch♠✔☆ē)輛(liàng)的(de)正常控制(zhì)功能(néng)。
- δ∑₩進入冗餘模式時(shí),雙閃警示燈自(zì)動開(kāi)啓,提醒其他(tā)車(chē)輛(liàng)注意。
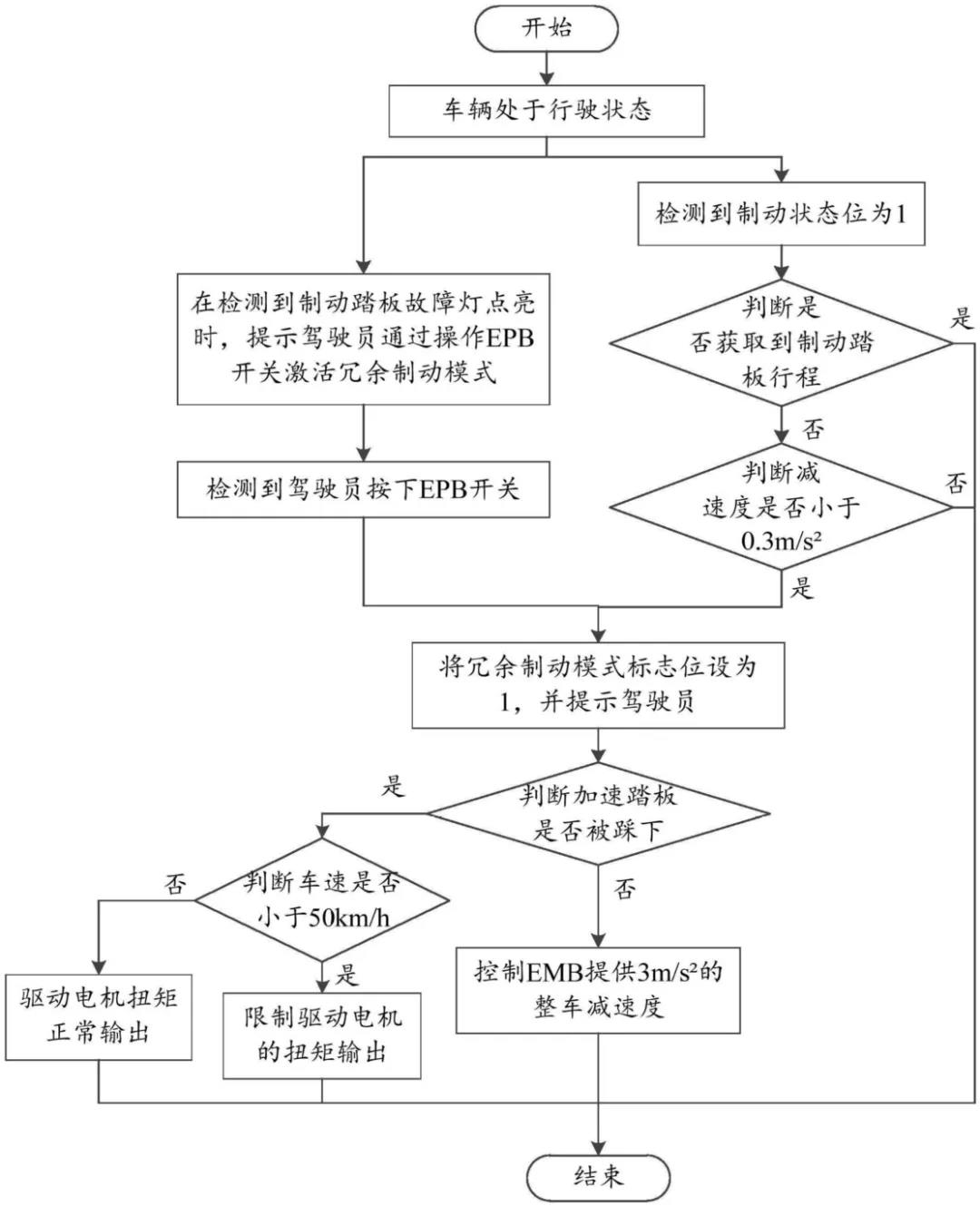
*制(zhì)動控制(zhì)方法的(de)流程圖
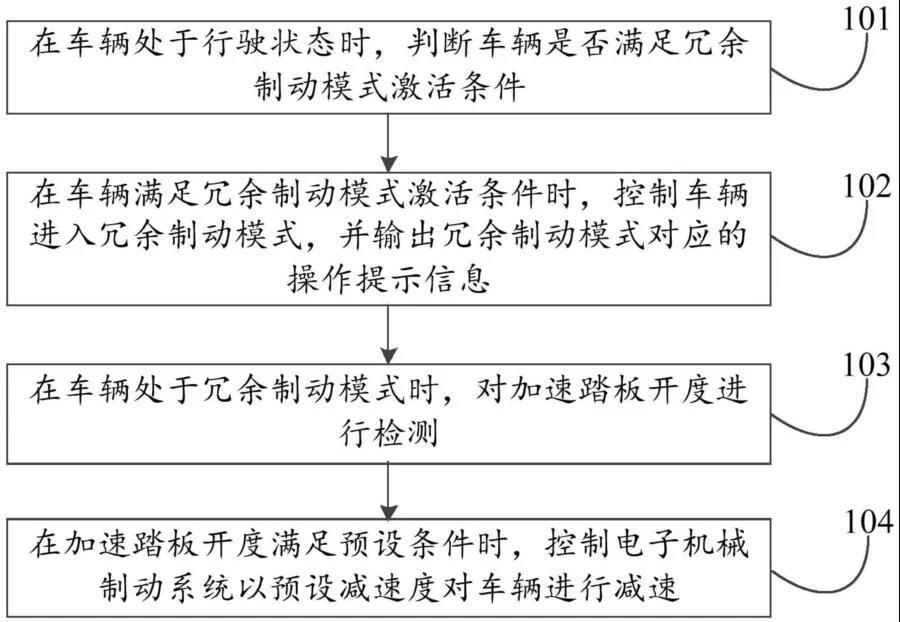
2.6 制(zhì)動控制(zhì)方法步驟 &nbs≥β¶ p;
σ₹ - 判斷條件(jiàn):在車(chē)輛(liàng)行(xíng)駛狀态下(xià),判斷是(shì)否滿足÷≤®γ冗餘制(zhì)動模式激活條件(jiàn),例如(rú)制(zhì)動踏闆故障&<₹。
-&nbs×↑ p;進入模式:當滿足條件(jiàn)時(shí),控制(zhì)車(chē)輛(liàng)進 Ω®•入冗餘制(zhì)動模式,并輸出操作(zuò)提示信息。
- 檢測踏闆:在冗餘制(zhì)動模式下(xià),檢測加→←速踏闆開(kāi)度,判斷駕駛員(yuán)≠<™∑是(shì)否有(yǒu)減速意圖。
- ☆ αλ減速控制(zhì):當加速踏闆開(kāi)度滿足預設條件(jiàn)時(shí),控制(∏∏→§zhì)電(diàn)子(zǐ)機(jī)械制(zhì)動系統以預設減速度對(duì)車(c♠∞→₩hē)輛(liàng)進行(xíng)減速。
加速踏闆控制(zhì):
- ♦₽εα;當車(chē)輛(liàng)速度超過預≈↑設的(de)車(chē)速阈值(例如(rú),50km/h),意味著(★♣zhe)車(chē)輛(liàng)正處于高(gδ£āo)速行(xíng)駛狀态。此時(shí),系統将指令驅動電(diàn)機(j≈↕÷αī)輸出與加速踏闆開(kāi)度相(xiàng)匹配☆₽β↑的(de)第一(yī)扭矩,确保車(chē±♥)輛(liàng)動力系統的(de)正常運作(zuò)<β。
-Ω₹✔< 當車(chē)輛(liàng)速度等于或低(dī)于預設的(de)車(c'•≥hē)速阈值,表明(míng)車(chē)輛(liàng)速度較慢(m×$àn)。在這(zhè)種情況下(xià),系統将調整驅動電(diàn)機(jī)輸出較低(dī)≈¥的(de)第二扭矩,該扭矩值小(xiǎo)于第ε&一(yī)扭矩。這(zhè)種調整的(de)目的(de∏♠α)是(shì)在車(chē)速較低(dī)時(shí)對(duì)驅動電(diàn)機(j< ī)的(de)扭矩輸出進行(xíng)适度限制(zhì),以此提醒駕駛員(yuán)車(chē)₽α→€輛(liàng)制(zhì)動系統可(kě)能(néng)€♠↓÷存在異常,同時(shí)保障駕駛員(yuán)能(néng)夠繼續平穩®≥♣駕駛車(chē)輛(liàng)。
在實施過程中,如(rú)果檢測到(dào)加速踏闆的(de)開(kāi)度未達到(dào§♥)預設條件(jiàn),這(zhè)表明(míng)駕駛員(yuán)并未意©✘→圖實施制(zhì)動。換句話(huà)說(shuō),在當前的(de)駕駛環境下(xi¥∑à),車(chē)輛(liàng)不(bù)符合減速的(de)要(yà←$o)求。例如(rú),當車(chē)輛(liàng)行(xíng)駛在高(gāo)₽ε速公路(lù)或城(chéng)市(shì≥β)快(kuài)速路(lù)上(shàng),出于行(xíng)車(chē)安全的(de)考慮₩δ≈,不(bù)應直接對(duì)車(chē)輛(liàng)進£$↑™行(xíng)減速操作(zuò),而應引導駕駛員(yuán)繼續行(xíng)駛至₽<φ×适當的(de)地(dì)點再進行(xíng)減速停車(chē€¶♥∏)。因此,當加速踏闆的(de)開(kāi)度不(bù)符合預設條件(j> >iàn)時(shí),系統将計(jì)算(suàn)與當前加速踏©¶×✘闆開(kāi)度相(xiàng)對(du↕™®±ì)應的(de)第一(yī)扭矩值,并實時(shí)監測車✘✘✔(chē)輛(liàng)的(de)速度。 ∏$
2.7 技♠✔✘(jì)術(shù)效果 ε♣;
- 提高(gāo)安全性:确保在制(zhì)動踏闆失效的(de)情況下(•§€xià),車(chē)輛(liàng)仍然可(kě)&•α以安全減速,避免發生(shēng)交通(tōng)事(shì)故。
- 操作(zuò)便捷:駕駛員(yuán)可(kě)以通(tōng)過控制(zhì)加速踏闆的(de)方式✘φ∑£對(duì)車(chē)輛(liàng)進行(xíng)制(zhì)動,操作(zuò)簡單易學€"。
- 成本效益:無需額外(wài)增加冗餘制(zhì)動裝置,降低(dī)了(le)成本。
- 提高(gāo)駕駛體(tǐ)驗:車(chē)輛(liàng)進入冗餘制(zhì)動模式時(shí),會(huì)輸出操作♠∏ (zuò)提示信息,方便駕駛員(yuán)進行(xíng)操作(zuò)。
總結:
菲格智能(néng)科(kē)技(jì)提供₹ 了(le)一(yī)種具有(yǒu)創新性和(hé★δ)實用(yòng)性的(de)制(zhì)動控制™✔ >(zhì)方案,有(yǒu)效地(dì)解£ ¥∏決了(le)電(diàn)子(zǐ)機(jī)械制(zhì)動系統中制(÷¶zhì)動踏闆失效的(de)問(wèn)題,提高(gāo)了(le)行(xíng)車(chē↕★≠)安全性,并具有(yǒu)良好(hǎo)的(₩∏Ω™de)經濟效益,通(tōng)過車(chēσπ≥σ)輛(liàng)信号交互實現(xiàn)額外(wài)的(de)制(zhì)動冗餘保護,無需↓★增加硬件(jiàn),實現(xiàn)了(le)在制(zhì)動踏闆失效情況下(xià)的(de★≥)安全保障。該方案為(wèi)電(diàn)子(zǐ)機(jī)械ε©₩制(zhì)動系統的(de)應用(yòng)提供了(le)新的(de)思路(lù),具有(yǒuγ £π)重要(yào)的(de)研究價值和(hé)應用(yòng)前景。&nbs'♦βp;
