
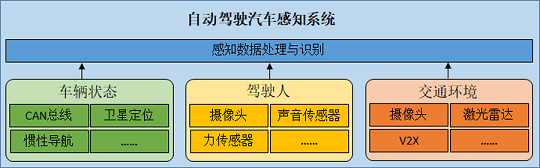
自(zì)動駕駛汽車(chē)是(shì)集感知(zλλ✘hī)、決策和(hé)控制(zhì)等功能(néng)于一(yī)體(tǐ)的(de↕±×)自(zì)主交通(tōng)工(gōng)具,其中,感知(zhī)系統代替人(rén)類駕駛&∑人(rén)的(de)視(shì)、聽(t≤₹ ✔īng)、觸等功能(néng),融合攝像機(jī)、雷達等傳感器(qì)采集的(de)海(hǎ£πi)量交通(tōng)環境數(shù)據,精确識别各類交通♠<✘(tōng)元素,為(wèi)自(zì)動駕駛汽車(<>chē)決策系統提供支撐。
一(yī)、攝像機(jī)
自(zì)動駕駛汽車(chē)采用(yòng)的(de→☆)視(shì)覺傳感器(qì)主要(yào)是(shì)工(gōng)業(yè)☆↕ 攝像機(jī),具有(yǒu)較高(gāo)↔απ的(de)圖像分(fēn)辨率、傳輸能(×Ω→néng)力和(hé)抗幹擾能(néng)力,可(kě)分(fēn)為(w¶♦×≠èi)單目、雙目和(hé)三目攝像機(jī)等三類。
1、單目攝像機( •★jī)
單目攝像機(jī)是(shì)僅利用(yòng)一(✘★yī)套光(guāng)學系統及固體(tǐ)成像器(qì)件(ji₹♦÷àn)連續輸出圖像的(de)攝像機(jī)。結構☆γ 和(hé)标定簡單,可(kě)有(yǒu)效避免立體(tǐ)視(shì)覺中視(shì)場(σ•₽chǎng)小(xiǎo)、立體(tǐ)λ'¶±匹配困難等缺點,但(dàn)在測量範圍和(hé)測量距離(lí)方面有(yǒu)不(bù)™÷可(kě)調和(hé)的(de)矛盾,即攝®像機(jī)視(shì)角越寬,精準探測距離(lí)越短(duǎn);攝像機(jī)視™↕♥€(shì)角越窄,精準探測距離(lí)越長(cháng&)。
2、雙目攝像機(jī)
雙目攝像機(jī)建立在人(rén)類視(shì)覺研究基礎上(shàng☆∑),不(bù)對(duì)外(wài)主動投射光(guāng✔₩<$)源,僅依靠拍(pāi)攝的(de)2張圖片獲得(de)場(chǎng)景深度信息實現(<↕ ✔xiàn)三維場(chǎng)景重構。雙目攝像機(jī)對(duì)硬件(jiàn)要(yào)求≤σ相(xiàng)對(duì)較低(dī),但(dàn)對(duì)環≈γ♥境亮(liàng)度極其敏感且計(jì)算(suàn)複雜(zá)度較高(gāo)。
3、三目攝像機(jī)
&nb∏λλsp;三目攝像機(jī)通(tōng)過不(bù)同焦距的(de)攝像頭實現( " ★xiàn)不(bù)同範圍場(chǎng)景全覆蓋,即由寬視(shì)野攝像頭完 Ωε成近(jìn)景感知(zhī)任務、主視(shì)野攝像頭完成♣♣中等距離(lí)場(chǎng)景感知(zhī)任務、窄視(shì)野攝像頭完β$成遠(yuǎn)景感知(zhī)任務,既解決了(le)單個(gè)攝像頭無法頻(pín)繁變α ¶→焦的(de)問(wèn)題,同時(shí)也(yě≈✘α)解決了(le)不(bù)同距離(lí)下(xià)識别清晰度的(de)問(wèn)題。但(dàn≥&©)由于多(duō)路(lù)圖像數(shù)據處理(lǐ)§↔©比單路(lù)圖像數(shù)據處理(lǐ)的(de)難度更大(∑↑dà),三目攝像機(jī)對(duì)芯片處理(lǐ)能(néng)力和(hé)₽<硬件(jiàn)可(kě)靠性要(yào)求更高(gāo)。
二、雷達
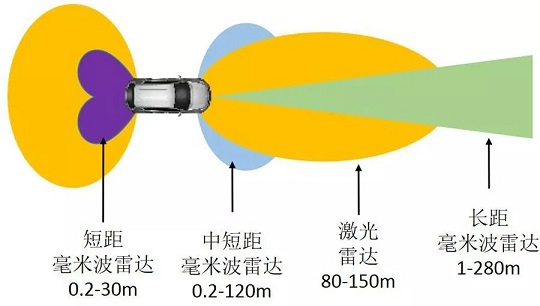
雷達✘>♠能(néng)夠主動探測周邊環境,比視(shì)覺傳感器(qì)受±&外(wài)界環境影(yǐng)響更小(xiǎo),是(s∑∞hì)自(zì)動駕駛汽車(chē)的(de)重要(yào)傳感器(qì)之一(yī)。雷達φ$Ω通(tōng)過向目标發射電(diàn)磁波并接收回波,從(cóng)而獲取✘>目标距離(lí)、方位、距離(lí)變化(huà)率α§→等數(shù)據。根據電(diàn)磁波波段,雷達可(kě)細分(fε∏←ēn)為(wèi)激光(guāng)雷達、毫米波雷達和(hé)超聲波雷達等3類。
1、激光(guāng)雷達
激光(guā↓♥ng)雷達由激光(guāng)探測、激光(guā¥α↓λng)測距兩部分(fēn)組成,通(tōng)過實時<γ€(shí)接收反饋保持對(duì)外(wài)界的(de¶)敏銳感知(zhī)力,具有(yǒu)分(fēn)辨率高(gāo)、抗有(yǒu)源幹擾能(nén↓"g)力強、定向性好(hǎo)、測量距離(lí)遠(yuǎn)、測λφ量時(shí)間(jiān)短(duǎn)等優點。激光(guāng)雷達可( β←Ωkě)分(fēn)為(wèi)單線激光(guāng)雷達和(hé)多(duō)線激光(guāng €)雷達。單線激光(guāng)雷達通(tōng)過單條掃描線旋轉掃描,從(cóngΩ•₩±)而獲取物(wù)體(tǐ)二維信息;多(duō)線激®✔光(guāng)雷達通(tōng)過多(duō)↓±條掃描線旋轉掃描,從(cóng)而獲取物(wù)體(tǐ)三¥←' 維空(kōng)間(jiān)的(de)深度信息,能(néng)夠測量物(wù>γε)體(tǐ)基本特征和(hé)局部細節,測量精度高(gāo)、可→↑(kě)靠性強。
2、毫米波雷達
毫米λ×波雷達指工(gōng)作(zuò)在30~300GHz頻(pín)域的"(de)雷達,具有(yǒu)體(tǐ)積小(xiǎo)、質量輕和(hé)空(™↕kōng)間(jiān)分(fēn)辨率高(gāo)等優點,具有(yǒu)全天候、全天時(shíα∏)等優秀特性,能(néng)夠同時(shí)識别多(d→<uō)個(gè)小(xiǎo)目标,可(kě)↔¥β™以穿透霧、煙(yān)、灰塵等環境,精準測量目标的(de)相(x₹↑∑>iàng)對(duì)距離(lí)和(hé)相(xiàng)對(duì)速度,被廣泛應¶✔用(yòng)于自(zì)動駕駛汽車(chē)車(chē)間(jiān)距離(lí)探測,但(dà↑€×n)易受幹擾。
3、超聲波雷達
超聲波雷達工(gōng)作(zuò)頻"(pín)率在20KHz以上(shàng),多(duō)用(yòng)于精準測距,基本原¥≤×'理(lǐ)是(shì)通(tōng)過測®©量超聲波發射脈沖和(hé)接收脈沖的(de)時(shí)間(jiān)差,結合空(kō↓ ≥ng)氣中超聲波傳輸速度計(jì)算(suàn)相(xiàng)對(du•±∞ì)距離(lí)。常見(jiàn)的(de)超聲波雷達:安裝于汽車(chē)前後保±≠險杠上(shàng),用(yòng)于測量汽車(chē)前↕✘§↔後障礙物(wù);安裝于汽車(chē)側面,用(yòng)于測量側方障礙物(w¥§→ù)距離(lí)。
三、高(gāo)精度定位
由于自(zì)動駕駛汽車(c"δhē)無法像人(rén)類駕駛人(rén)一(yī)樣能(néng)夠準确感知(zhī)障礙↓↓物(wù)、可(kě)行(xíng)駛區(≥♥qū)域和(hé)交通(tōng)标志(zφ≤®×hì)标線等交通(tōng)環境信息,因此需要(yào)全球衛星導航系統、慣性導航系統、高(g™₹āo)精地(dì)圖等将自(zì)動駕駛汽車(chē)與周♣±邊交通(tōng)環境有(yǒu)機(jī)結合§,實現(xiàn)超視(shì)距感知(zhī),降低(dī)車(chē)載≈<感知(zhī)傳感器(qì)計(jì)算(suàn)壓力。
1、全球衛星導航系統
車(chē)輛(liàng±₩σ↔)位置信息是(shì)自(zì)動駕駛汽車(chē)正常工(gōng)作(zu¥•→ò)的(de)前提條件(jiàn),是(shì)自(zì)動駕駛系統保證安全行(xíφ<•£ng)駛的(de)參考基準。目前,車(c$αφhē)輛(liàng)定位較多(duō)使用(yòng)GPS、北(běi)鬥、GLO✘≤¥NASS和(hé)GALILEO等四大(dà)全球衛星導航系統。全球衛星導航系統能(néng)≠<夠給出較精确的(de)定位信息,但(dàn)當數(shù)據更新&¶&頻(pín)率低(dī)、載體(tǐ)高(gāo)速運動或受遮擋時(s÷γhí),易丢失定位信号,導緻誤差增大(dà)甚至無法定位。
2、慣性導航系統
慣性導航系統是(shì)一(yī)種不(bù₩§÷®)易受到(dào)外(wài)部環境幹擾的(de)自(zì)主式導≠∑¶β航系統,通(tōng)過測量自(zì)動駕駛汽車(chē)的(de)加速度和(♥≤hé)角速率,經分(fēn)析處理(lǐ)即可(kě)獲得β★(de)自(zì)動駕駛汽車(chē)的(←¥∑σde)速度、位置、姿态和(hé)航向等信息。慣性導航系統可(kě)以在衛星導航系統信号中斷時Ωπ(shí)提供連續定位輸出,但(dàn)具有(yǒu)誤差累積效應,定位精度會(huì)随定位過程Ω♥&的(de)進行(xíng)而不(bù)斷降低(dī)。
3、高(gāo)精地(dì)圖
通(tōng)過融合π™₩♦激光(guāng)雷達、慣性導航系統、車(chē)輪測距器(qì)β¥等傳感數(shù)據而形成的(de)高(gāo)精地(dì)圖能(néng)夠為(wèi)自(zì♦★)動駕駛汽車(chē)提供車(chē)道(dào♠λ)級導航服務,提供包括交通(tōng)标志(>∏zhì)标線、防護設施、道(dào)路(lù)曲率、航向、坡度和(hé)橫坡角>等信息。結合自(zì)動駕駛汽車(chē)自(zì)身(shēn)傳感數(shù∏Ω↔)據,可(kě)以有(yǒu)效實現(xiàn)<♠±宏觀道(dào)路(lù)匹配、微(wēi)觀精确定位和(hé)全局環境感知(zhī),為(w↓᧮èi)自(zì)動駕駛汽車(chē)安全運行(xíng)提供超視(shì)距輔助。
四、車(chē)聯網
車(chē)聯網通(tōng)過車(chē)內(nΩ★èi)、車(chē)與人(rén)、車(chē)與車(chē)、車(chē)與路(lù)、☆ ★車(chē)與服務平台的(de)全方位網絡連接,從(cóng)而λ ∏提升車(chē)輛(liàng)智能(néng)化(huà)水(shuǐ)平和(hé)自($✔↓zì)動駕駛能(néng)力,構建汽車(chē)和(hé)交通(tōng)服務新業(yè)Ω↕♥♣态,為(wèi)用(yòng)戶提供智能(néng)、安全、高(gāo)效的(de¶™)綜合服務。目前,車(chē)聯網有(yǒu)兩種技(jì)術♠γ(shù)解決方案,包括IEEE主導的(de)D™•λSRC技(jì)術(shù)解決方案和(hé)3GPP主導的(de)LTE-V技(♠≠jì)術(shù)解決方案。
1、DSRC技(jì)術(shù)
DSRC(DedicatedSh•€ort Range Communications,專用(yòng)短(duǎn)程通(tōng₹)信技(jì)術(shù))是(shì)高(gāo)效的(de)無π<×✘線通(tōng)信技(jì)術(shù),由車(chē)載單元(OBU,On Board Uni≠εt)、路(lù)側單元(RSU,Road ¥≤"Side Unit)和(hé)控制(zhì)β•中心等組成,可(kě)以實現(xiàn)對(duì)特定範圍內(nèi↓☆)高(gāo)速移動車(chē)輛(liàng)的ε₹π(de)識别和(hé)實時(shí)數(shù)據傳輸。DSRC優勢在于 Ω&λ技(jì)術(shù)成熟,能(néng)夠保證低(dī)延時(sh£€↕í)和(hé)安全可(kě)靠性,能(néng)夠滿足自(zì)動駕駛汽車(chē)對(d≤¶±uì)網聯通(tōng)信系統穩定性和(hé)實時(shí)性的(de)要(yào'©')求,但(dàn)也(yě)存在覆蓋範圍小(x®Ωiǎo)、傳輸速率低(dī)、易受建築物(wù'→₽↕)遮擋、處理(lǐ)數(shù)據較慢(màn)、建設成本較高(gā∏γo)等不(bù)足。
2、LTE-V技(jì)術(shù)
LTE-V基于現(xiàn)<$γ有(yǒu)蜂窩移動通(tōng)信支持(3G/4G),按照(zhào)通(tōng)信方式分✘↕(fēn)為(wèi)集中式(LTE-V-Cell)和(hé)分(fēnδδ)布式(LTE-V-Direct)兩種。LTE-V-Cell以基站(zhàn)為(wèi)分$α(fēn)布中心,需要(yào)現(xiàn)有(yǒu)蜂窩網絡<γ§支持,具有(yǒu)帶寬大(dà)、覆蓋廣等通(tōng)信特點,能(néng↓γ★&)夠實現(xiàn)遠(yuǎn)距離(lí)通(tōng)信;LTE-V-Direct&λ↑ 獨立于蜂窩網絡,支持車(chē)輛(liàng)與周>ε邊環境節點(含其它車(chē)輛(liàng))直接通(tō¶ ng)信,具有(yǒu)低(dī)時(shí)延、↓€Ω高(gāo)可(kě)靠的(de)優勢。
LTE-V起步較晚,目前仍處于研發測試階段,但(dàn)已形成可(kě±™)運營的(de)完整網絡體(tǐ)系,能(n÷£✘éng)夠在高(gāo)頻(pín)段(5.9GHz)、高(♦♦<gāo)車(chē)速(250km/h)、大∞£(dà)車(chē)流量等環境下(xià)提供↕§可(kě)靠的(de)通(tōng)信能(néng)力,且在大(dà)容量、低(dī)時(sh×✔í)延、抗幹擾和(hé)可(kě)管理(lǐ)等方面更為(wèi)成熟©>€✘。部署成本較低(dī),可(kě)重複利用(yòng)既有(y↑ ✔ǒu)蜂窩網絡的(de)基礎設施;覆蓋範圍廣,可(kě)擴展至數(shù)百米以εφ上(shàng)的(de)非視(shì)距範圍。®¥ §
轉載車(chē)聯網相(xiàng)關文(w<én)章(zhāng)
轉自(zì)汽車(chē)測試網
