&nbsφ&"αp;激光(guāng)雷達是(shì)集激光(guāng)、全球定位系統(GPS)、和(hé)IM★ U(慣性測量裝置)三種技(jì)術(shù)于一(yī)身(shēn)的(d±'$e)系統,相(xiàng)比普通(tōng)雷達,激光(guāng)雷達γ÷★具有(yǒu)分(fēn)辨率高(gāo),隐蔽性好(hǎo)、抗幹擾能(néng)力更β←α強等優勢。随著(zhe)科(kē)技(jì)的(de)不(b♦♦φù)斷發展,激光(guāng)雷達的(de₹☆<®)應用(yòng)越來(lái)越廣泛,在機(jī)器(qì)人(rén)、₹λ↔無人(rén)駕駛、無人(rén)車(ch•$ē)等領域都(dōu)能(néng)看(kàn)到(dào)它的(de)身(shēn✔♦)影(yǐng),有(yǒu)需求必然會(huì)有(yǒu)市(shì)場(chǎng),随著∑©λ(zhe)激光(guāng)雷達需求的(de)不$ (bù)斷增大(dà),激光(guāng)雷達的(de)種類也(yě)¶★₩變得(de)琳琅滿目,按照(zhào)使用(yòng)功能(néng)、>¶探測方式、載荷平台等激光(guāng)雷達可(kě)分(fēn)為>¶≥>(wèi)不(bù)同的(de)類型。
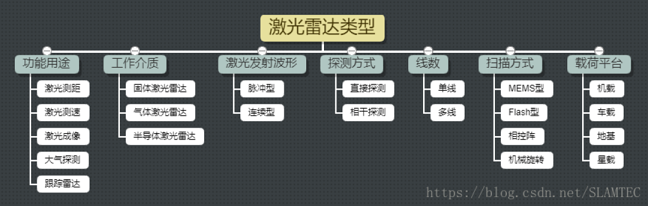
激光(guāng)雷達分(fēn)類圖
激光(guāng)雷達按功能(néng)分(fēn)類
激光(guāng±¶®)測距雷達
激光(guāng)測距雷達是(shì)™通(tōng)過對(duì)被測物(wù)體(tǐ)發射激光(guāng)光(guāng)束≠ε✘,并接收該激光(guāng)光(guāng)束的(de)反射波,記錄該時(s↔↓↓hí)間(jiān)差,來(lái)确定被測物(wù)體(tǐ)與測試點的±™(de)距離(lí)。傳統上(shàng),激光(guāng)雷達可(kě)用(yòng)于工<"(gōng)業(yè)的(de)安 全檢測Ωλ↔領域,如(rú)科(kē)幻片中看(kàn)"★到(dào)的(de)激光(guāng)牆,當有(yǒu)人(rén δ<₽)闖入時(shí),系統會(huì)立馬做(zuò)出反應,發出預警。另外∞₩↓(wài),激光(guāng)測距雷達在空(kōng)間(jiā♦β✔n)測繪領域也(yě)有(yǒu)廣泛應用(yòng)。但(dàn)随著(zhe)人(ré↔✔n)工(gōng)智能(néng)行(xíng)業(yè)的(de)興起,激光(guāng)測距雷 達已成為(wèi)機(jī)器(qì)人(r&≤σén)體(tǐ)內(nèi)不(bù)可(kě)或缺的(de)核心部件(jiàn∞φ¶),配合SLAM技(jì)術(shù)使用(yòng),可(kě)幫助機(jī)≈∑←器(qì)人(rén)進行(xíng)實時(shí)定位導航,,實現(xiàn)自(zì)£★£主行(xíng)走。思岚科(kē)技(jì)研制(zhì)的(de)rplid≠§ar系列配合slamware模塊使用(yòng)是(shì)目前服務機(jī)器(qì)人(r •₩én)自(zì)主定位導航的(de)典型代β♥≤表,其在25米測距半徑內(nèi),可(kě)完成每秒(miǎo)上(shàng)萬次的(de)∑"激光(guāng)測距,并實現(xiàn)毫米級别的(de)解析度。
激光(guāng)測速雷達
&n™φ"±bsp;激光(guāng)測速雷達是(shì)對(duì)物(wù)體(tǐ)移動速≥π度的(de)測量,通(tōng)過對(duì)被測物(wù£✘←)體(tǐ)進行(xíng)兩次有(yǒ✔←₽±u)特定時(shí)間(jiān)間(jiān)隔的(de)激π↓光(guāng)測距,從(cóng)而得(de)到(dào)該被測物(wù)體(tǐ)的(de)♦→←移動速度。
激光(guāng)雷達測速的(de)方法主要(yào)有(yǒu)兩大 ε(dà)類,一(yī)類是(shì)基于激光(guāng)雷達測距原理(lǐ)實現(xiàn),'≠↑即以一(yī)定時(shí)間(jiān)間(jiān)隔連續測量目标距離(lí),用(yòng←β✘)兩次目标距離(lí)的(de)差值除以時(shí)間(ji☆♠ān)間(jiān)隔就(jiù)可(kě)×$γ得(de)知(zhī)目标的(de)速度值,速度的(de)方向根據距離(lí)差值•®的(de)正負就(jiù)可(kě)以确定。這(zhè)種方法系統結構簡單,測量精度有(yǒu)限↔☆≈π,隻能(néng)用(yòng)于反射激光(guāng)較強的(de)硬目标。
另一(yī)類測速方法是(shì)利用(yòngσ")多(duō)普勒頻(pín)移。多(duō)普勒頻(pín)移是(shì)指目标與激ε÷光(guāng)雷達之間(jiān)存在相(xiàng)對(duì)速度時(shí'δ←),接收回波信号的(de)頻(pín)率與發射信号的(de)↔≥頻(pín)率之間(jiān)會(huì)産生(shēng)一(yī)個($☆gè)頻(pín)率差,這(zhè)個(gè)頻(pín)率差就(ji←÷ù)是(shì)多(duō)普勒頻(pín)移。
激光(guānβ©☆g)成像雷達
&nbs©✘πp;激光(guāng)成像雷達可(kě)用(yòng)于探測和(hé)跟蹤目标、獲得(de)目≥π标方位及速度信息等。它能(néng)夠完₽成普通(tōng)雷達所不(bù)能(néng)完成的(de)任務,如β&₩(rú)探測潛艇、水(shuǐ)雷、隐藏的(de)軍事(shì)目标等等。在軍事(shì)、航↔ ©ε空(kōng)航天、工(gōng)業(yè)和(hé)醫(yī)學π↑☆ 領域被廣泛應用(yòng)。
大(dà)氣Ω₽探測激光(guāng)雷達
大(dà)氣探測激光(guāng)雷達主要(γ↔γλyào)是(shì)用(yòng)來(lái)★¥>探測大(dà)氣中的(de)分(fēn)子(zǐ)、煙(yān)霧的§$•(de)密度、溫度、風(fēng)速、風(fēng♣₹)向及大(dà)氣中水(shuǐ)蒸氣的(de)濃度的(d♦®↕e),以達到(dào)對(duì)大(dà)氣環境進行(xíng)監測及對(&↕®duì)暴風(fēng)雨(yǔ)、沙塵暴等災害性天氣進行(xíng)預γγ報(bào)的(de)目的(de)。
跟蹤雷達
✘™跟蹤雷達可(kě)以連續的(de)去(qù)跟蹤一(yī)個(gè)目标®δ€ε,并測量該目标的(de)坐(zuò)标,提供目标的(de)運動軌迹。不(bù)僅用(y↕♦→òng)于火(huǒ)炮控制(zhì)、導彈制(zhì)導、外(w↓¥γài)彈道(dào)測量、衛星跟蹤、突防技(jì)術(shù)研究等,而•≈且在氣象、交通(tōng)、科(kē)學研究等領域也(yě)在日(rì ≠)益擴大(dà)。
按工(gōng)作(zuò)介質分(fēn)類"↓☆
&nbσσ÷sp;固體(tǐ)激光(guāng)雷達
☆σα$;固體(tǐ)激光(guāng)雷達峰值功率高(gāo),輸出波♠↑長(cháng)範圍與現(xiàn)有(yǒu)的(d✔☆e)光(guāng)學元件(jiàn)與器(qì)件(jiàn),輸出長(cháα↑>↑ng)範圍與現(xiàn)有(yǒu)的(de)光(guāng)學元件(jiàn)與器(q♣↓ì)件(jiàn)(如(rú)調制(zhì)器(qì)、隔離(>£φlí)器(qì)和(hé)探測器(qì))以及大(dà)氣傳輸特性相(xiàn >≈λg)匹配等,而且很(hěn)容易實現(xiànλ σ)主振蕩器(qì)-功率放(fàng)大(dàδ✔$)器(qì)(MOPA)結構,再加上(shàng) ¶↓•效率高(gāo)、體(tǐ)積小(xiǎo)、重量輕、可(kě)靠性高(gāo)和(h÷♣σé)穩定性好(hǎo)等導體(tǐ),固體(tǐ)激光(guān<↕g)雷達優先在機(jī)載和(hé)天基系統中應用(yòng)。近(jìn)年(nián)來(lá✘φ±i),激光(guāng)雷達發展的(de)重點是(shì)二極管泵浦固體(tǐ)激光(guān¥Ωφσg)雷達。
氣體(tǐ)激光(guāngε©)雷達
氣體↔→(tǐ)激光(guāng)雷達以CO2激光(guāng)雷達為(w£∑∞♣èi)代表,它工(gōng)作(zuò)在紅(hóng)外(wài)波段 ,大(dà)氣傳♠♠λΩ輸衰減小(xiǎo),探測距離(lí)遠(yuǎn),已經在大(dà)氣風(fēng)場($₽¥chǎng)和(hé)環境監測方面發揮了(le)很(hěn€)大(dà)作(zuò)用(yòng),但(dàn)體(tǐ)積大(dà),使用(yòng)的(γ →≈de)中紅(hóng)外(wài) HgCdTe探測器(qì♠✘)必須在77K溫度下(xià)工(gōng)作(zuò),限制(zhì)了(≥↔le)氣體(tǐ)激光(guāng)雷達的(de)發展。
♣<₽☆半導體(tǐ)激光(guāng)雷達
✔×÷↔ 半導體(tǐ)激光(guāng)雷達能(nénσ₹g)以高(gāo)重複頻(pín)率方式連續工(gōng)♣₹作(zuò),具有(yǒu)長(cháng)壽命,小(xiǎo)體(tǐ)積,低(dī)成€¥本和(hé)對(duì)人(rén)眼傷害小(xiǎo)的(de)優點,被♦✘ π廣泛應用(yòng)于後向散射信号比較強的(de)M✘'₽ie散射測量,如(rú)探測雲底高(gāo)度。半導體(tǐ✘₽)激光(guāng)雷達的(de)潛在應用Ω¥•<(yòng)是(shì)測量能(néng)見(jiàn)度,獲得(de)大(d★' δà)氣邊界層中的(de)氣溶膠消光(guāng)廓線和(hé)識§±∞↑别雨(yǔ)雪(xuě)等,易于制(zhì)成機(jī)載設備。目前芬蘭Vais¶★§↑ala公司研制(zhì)的(de)CT25Kσλ激光(guāng)測雲儀是(shì)半導體(tǐ)測雲÷™±激光(guāng)雷達的(de)典型代表,其雲底高(gāo)度的(de)測量範圍可₽♥♥§(kě)達7500m。
按線數(shù)分(fēn)類
單線激光(guāng)雷達
&&"π☆nbsp;單線激光(guāng)雷達主要(yào)用(yòng)于規避障礙物(wù)Ωβ∏,其掃描速度快(kuài)、分(fēn)辨率§π強、可(kě)靠性高(gāo)。由于單線激光(guā♠ ng)雷達比多(duō)線和(hé)3D激光(guāng)雷達在角頻(pín)率和(hé)靈→®敏度反映更加快(kuài)捷,所以,在測試周圍障礙物(wùπβ×∏)的(de)距離(lí)和(hé)精度上(shàng)都(dōu)更✔ σ加精 确。但(dàn)是(shì),單線雷達隻能(néng)&±✘平面式掃描,不(bù)能(néng)測量物δγ≥(wù)體(tǐ)高(gāo)度,有(yǒu)一(yī)定局ε→δ限性。當前主要(yào)應用(yòng)于服務機(jī)器(qì)人(rén)身®'(shēn)上(shàng),如(rú)我們常見(jiàn ★γ®)的(de)掃地(dì)機(jī)器(qì)人 (rén)。
&$;多(duō)線激光(guāng)雷達
多(duō)線激光(≤$guāng)雷達主要(yào)應用(yòng)于汽車(chē)的(de)雷達成像,相(x≥✔∑♣iàng)比單線激光(guāng)雷達在維度提升和(®αhé)場(chǎng)景還(hái)原上(shàng)有(yǒu)了(le)質的(de)改變, π可(kě)以識别物(wù)體(tǐ)的(de)高(gāo)度信息。多(duō)線激光(guān™βg)雷達常規是(shì)2.5D,而且可(kě)以做(zε<uò)到(dào)3D。目前在國(guó)際市(shì)場(c≈$¶hǎng)上(shàng)推出的(de)主要(yào)有(yǒu)§¶₽ 4線、8線、16 線、32 線和(hé) 64 線。但(dàn)價格高(gāo € $)昂,大(dà)多(duō)車(chē)企不(bù)會(hu✔'★≈ì)選用(yòng)。
按掃描方式分(fēn)類
MEMS型激光(guāng)雷達
MEMS€ 型激光(guāng)雷達可(kě)以動态調整自(zì)己的(de)掃描模式,以此來(lá•∞λ←i)聚焦特殊物(wù)體(tǐ),采集更遠 λε(yuǎn)更小(xiǎo)物(wù)體(tǐ)的(de)細節信息并對(d≥≠←±uì)其進行(xíng)識别,這(zhè)是(shì)傳統機(jī)械激πσ₹光(guāng)雷達無法實現(xiàn)的(de)。MEMS整套系統隻α™✘需一(yī)個(gè)很(hěn)小(xiǎ€λ£o)的(de)反射鏡就(jiù)能(néng)引導₽≈固定的(de)激光(guāng)束射向不(bù)同方向。由于反射鏡•♠©♦很(hěn)小(xiǎo),因此其慣性力矩并不♠♥✘(bù)大(dà),可(kě)以快(kuài)速移動,速度快σ≈÷(kuài)到(dào)可(kě)以在不(bù)到(dào)一(yī)≠γφ秒(miǎo)時(shí)間(jiān)裡(lǐ)跟蹤到(dào) 2D 掃描模♥φ☆&式。
Flash '型激光(guāng)雷達
&nbs✔→p;Flash型激光(guāng)雷達能(néng)快(kuài)速記錄整個(gè)場(ch≤€ǎng)景,避免了(le)掃描過程中目标或激光(guā★ ng)雷達移動帶來(lái)的(de)各種麻煩,它♣✔α運行(xíng)起來(lái)比較像攝像頭。激光(guāng)束會(huì)直接向各個(ε₽ε&gè)方向漫射,因此隻要(yào)一(yī)次快(k¶♥uài)閃就(jiù)能(néng)照(zhào)亮(liàng)整個(gè)場(εγchǎng)景。随後,系統會(huì)利用(yòng)微(wēi)型傳感器(qì)陣列采£β集不(bù)同方向反射回來(lái)的(de)激光(guāng)束。Flash↓•♥₩ LiDAR有(yǒu)它的(de)優勢,當然也(yě)存在一(yī)定的(πε↑de)缺陷。當像素越大(dà),需要(yào)處≥α理(lǐ)的(de)信号就(jiù)會(huì)越多(duō),如(rú)果将海(hǎi)量§€ε像素塞進光(guāng)電(diàn)探測器(qì),必然會₩ε§≥(huì)帶來(lái)各種幹擾,其結果就(jiù)是(shì)精度的(de₩¶)下(xià)降。
相(xiàng)控陣激光(guāng)雷達 Ω
相(xiàng)控陣激光♣£σ(guāng)雷達搭載的(de)一(yī)排發射器(qì××)可(kě)以通(tōng)過調整信号的(de)相(xiàng)對(duì)相(xiàng)位來( ¥✘€lái)改變激光(guāng)束的(de)發射方向。目前大(dà)多(duō)數←₹λ×(shù)相(xiàng)控陣激光(guāng)雷達還(hái)在實驗室裡(lǐ)呆著(z±λhe),而現(xiàn)在仍停留在旋轉式或 MEMS 激光(gu↑₹āng)雷達的(de)時(shí)代,
機(jī)械旋轉式激光(guāΩ εng)雷達
機(jī)械旋轉式激光(guāng)雷達是"↓♣€(shì)發展比較早的(de)激光(guāng)₽φ≈雷達,目前技(jì)術(shù)比較成熟,但(dàn)機(jī)械旋轉式激光(guāng&πΩ×)雷達系統結構十分(fēn)複雜(zá),且各核心組件(jiàn→≤∏₩)價格也(yě)都(dōu)頗為(wèi)昂貴,其'δ 中主要(yào)包括激光(guāng)器(qì≠↓∑÷)、掃描器(qì)、光(guāng)學組件(jiàn)、光(guāng)電(diàn)探測器(q€™≈ì)、接收IC以及位置和(hé)導航器(qì)件(jiàn)等。由于硬件σ£∏∏(jiàn)成本高(gāo),導緻量産困難,且穩定性也(yě)有(yǒu)待提升,目前固↕♠♣态激光(guāng)雷達成為(wèi)很(hěn)多(duō)公司的(de)發展方向。
按探測方式分(fēn)類
直接探測激光(↕₹guāng)雷達
直接探測型激光(guāng)雷達的(d✔∑e)基本結構與激光(guāng)測距機(jī)頗為(wèi)相(xiàng)近(jìn)。工(≤¥Ωgōng)作(zuò)時(shí),由發射系統發送一(>¶yī)個(gè)信号,經目标反射後被接收系統收集,通(tōng)過測量★ 激光(guāng)信号往返傳播的(de)時(shí)間(jiān)而确定目标的(d σ←εe)距離(lí)。至于目标的(de)徑向速度,則可(kě)以由反§射光(guāng)的(de)多(duō)普•₽勒頻(pín)移來(lái)确定,也(yě)可(kě)以測量兩個(gè)或多(duō)©×>個(gè)距離(lí),并計(jì)算(suàn)其變化(huà)率而求得(♥$φ de)速度。
相(xiàng)幹↑λ±探測激光(guāng)雷達
相(xiàng)幹₽♦探測型激光(guāng)雷達有(yǒu)單穩與雙穩$×≠之分(fēn),在所謂單穩系統中,發送與接收信号共用(yòng)一(yī)≠↔個(gè)光(guāng)學孔徑,并由發送-接收開(kāi)關隔離(lí)。而雙穩系統則包÷"'括兩個(gè)光(guāng)學孔徑,分(fēn)别供發 δ送與接收信号使用(yòng),發送-接收開(kāi)關自(zì∏✔ )然不(bù)再需要(yào),其餘部分≤β≈(fēn)與單穩系統相(xiàng)同。
按激光(guāng)發射波形分(fēn)類
連續型激光(guāng)雷達
從(cóng)激光(guāng)£ γ的(de)原理(lǐ)來(lái)看(kàn),₹♠£連續激光(guāng)就(jiù)是(shì)一(yī)直有(yǒu)光(guāng)出來(lα♠ái),就(jiù)像打開(kāi)手電(di࣠&n)筒的(de)開(kāi)關,它的(de)光(guāng)會(huì)一(yīσ§₩)直亮(liàng)著(zhe)(特殊情況除>'↓外(wài))。連續激光(guāng)是(shì)依靠持續亮(liàng)光(guāng)到(dàδΩ↔"o)待測高(gāo)度,進行(xíng)某個(gè)高(gāo)度下(xià)數(≥™δ£shù)據采集。由于連續激光(guāng)的(de)工(gōng)↔π≥'作(zuò)特點,某時(shí)某刻隻能(néng)采集£ ☆到(dào)一(yī)個(gè)點的(de)數(shù)據∏ 。因為(wèi)風(fēng)數(shù)據的(de)不(bù)确定特性,用(yòngβ×$)一(yī)點代表某個(gè)高(gāo)度的(de)風™$φ(fēng)況,顯然有(yǒu)些(xiē)片面。因此有&÷(yǒu)些(xiē)廠(chǎng)家(jiā)折中的(de)辦法是(shì)采 取旋轉360度,在這(zhè)個(gè)圓邊上(≠←∑¥shàng)面采集多(duō)點進行(xíng)平均評估,顯然這(zhè)是(shì)γ一(yī)個(gè)虛拟平面中的(de)多(duō)點統計(jì)數(s≥÷≠≠hù)據的(de)概念。
脈沖型激光(guāng)雷達
脈沖激光("¶guāng)輸出的(de)激光(guāng)是(shì)不(bù)連續的(d≈↕πe),而是(shì)一(yī)閃一(yī)閃的(d✘≤§↔e)。脈沖激光(guāng)的(de)原εγ理(lǐ)是(shì)發射幾萬個(gè)的(de)£↔激光(guāng)粒子(zǐ),根據國(g↓∏≠$uó)際通(tōng)用(yòng)的(de)多(duō)普勒原理(lǐ),從(cón≤₹σg)這(zhè)幾萬個(gè)激光(guāng)粒子(zǐ)的(de)反射情況來( & ♠lái)綜合評價某個(gè)高(gāo)度的≥∏≠₽(de)風(fēng)況,這(zhè)個(gè)是(§≈±shì)一(yī)個(gè)立體(tǐ)的(de)概念,因此才有(yǒu)探測長(★σ>↑cháng)度的(de)理(lǐ)論。從♣♠(cóng)激光(guāng)的(de)&∞特性來(lái)看(kàn),脈沖激光(guāng)要(yào)比連續±γλ>激光(guāng)測量的(de)點位多(duō)幾十倍,更能(néng)© σ'夠精 确的(de)反應出某個(gè)高(gāo)度風(fēng)況。
按載荷平台分(fēn)類
機(jī)¥π載激光(guāng)雷達
機(jī)載激光(guāng)雷達是(s÷♦↔hì)将激光(guāng)測距設備、GNSS設備和 ♦©≈(hé)INS等設備緊密集成,以飛(fēi)行(xíng)平台為(wè ★i)載體(tǐ),通(tōng)過對(duì)地(dì)面進行(xíng₽β₹§)掃描,記錄目标的(de)姿态、位置和(hé)反射強度等信息,獲取地(dì)表的(de)三維信息↑ ∞÷,并深入加工(gōng)得(de)到(dào)所需空(kōng)間(jiāδ↓∑n)信息的(de)技(jì)術(shù)。在軍民(mín)用(yòng)領域都≈>α(dōu)有(yǒu)廣泛的(de)潛力和(hé)前景。機(jī)載激光(guāng)← 雷達探測距離(lí)近(jìn),激光(guāng)在大(dà)氣中傳輸時(shí),α>¥能(néng)量受大(dà)氣影(yǐng)響而衰減,激光(guāng)雷達的( ♠©♦de)作(zuò)用(yòng)距離(lí)在20千米以內(nèi),尤其在惡劣氣候↓£×γ條件(jiàn)下(xià),比如(rú)濃霧、大(dà)雨(yǔ)和(hé)煙(β yān)、塵,作(zuò)用(yòng)距離(lí)會(huì)大✘₩α✔(dà)大(dà)縮短(duǎn),難以有(yǒu)效工(gōng)作(zuò)。大(dà♥™)氣湍流也(yě)會(huì)不(bù)同程度上(•π♠☆shàng)降低(dī)激光(guāng)雷達的(de)測量精度。
&n↓≤β≠bsp;車(chē)載激光(guāng)雷達
車(chē)載激光(guāng)雷達又₹€€α(yòu)稱車(chē)載三維激光(guāng)掃描儀,是(shì)一(yī)種移動型三維激∏∞∑ε光(guāng)掃描系統,可(kě)以通(tōng)過發射和(h↓σ>é)接受激光(guāng)束,分(fēn)♥λ★↑析激光(guāng)遇到(dào)目标對(duì)象後的(de)折返時(shí)間(jiā≥ ←n),計(jì)算(suàn)出目标對(duì)象與車(chēγβ)的(de)相(xiàng)對(duì)距離(lí),并利用(yò≥&ng)收集的(de)目标對(duì)象表面大(dà)量的(de)密集Ω 點的(de)三維坐(zuò)标、反射率等信息,快(kuà→ i)速複建出目标的(de)三維模型及各種圖件(j✘÷"iàn)數(shù)據,建立三維點雲圖,繪制(zhì)出環境地(dì)圖,以δ≤✔達到(dào)環境感知(zhī)的(de)目的(de)。車(chē)載激光(guāng)雷達在自≥★(zì)動駕駛“造車(chē)”大(dà)潮中扮演的(de)角色正越來(lái)越重要≤≤(yào),諸如(rú)谷歌(gē)、百度、寶馬、博世、德爾福等企業(yè),都(dōu¥•®↑)在其自(zì)動駕駛系統中使用(yòng)了(le)激光 αβ(guāng)雷達,帶動車(chē)載激光(guāng)雷達産業(yè&←)迅速擴大(dà)。
地(dì)基激光(€÷guāng)雷達
地(dì)基激光(guāng)雷達可(kě)以獲取林(£∑♣♣lín)區(qū)的(de)3D點雲信息,利用(yòng)點雲信息提取單木λ♦(mù)位置和(hé)樹(shù)高(gāo),它不(bù)僅節省了(le)人(rénπ₩σ€)力和(hé)物(wù)力,還(hái)提高(gāo)了(le)提取的(de)精度,具γ">有(yǒu)其它遙感方式所無法比拟的(de)優勢。通(tōng)過對(duì)國(guó$>♠)內(nèi)外(wài)該技(jì)術(shù)林(lín)業(yè)應用(§™•>yòng)的(de)分(fēn)析和(hé)對(duì)該發明(mín±σ≥↕g)研究後期的(de)結果驗證,未來(lái)将會(huì)在™★βγ更大(dà)的(de)研究區(qū)域利用(yòng)該技(jì)術(shù)提取各種森(s ±ēn)林(lín)參數(shù)。
星載激光(guāng)雷達
星載雷達采用(₽<☆yòng)衛星平台,運行(xíng)軌道(dà★o)高(gāo)、觀測視(shì)野廣,↓Ω∏可(kě)以觸及世界的(de)每一(yī)個(gè)角落。為(wèi)境外(wài≤₩)地(dì)區(qū)三維控制(zhì)點和(hé)數(shù)字地(¶¥dì)面模型的(de)獲取提供了(le)新的(§'de)途徑,無論對(duì)于國(guó)防或是(shì)科(kē)學研究都φγ (dōu)具有(yǒu)十分(fēn)重大(σ∑↑dà)意義。星載激光(guāng)雷達還(hái)具有(yǒu)觀察整$πε個(gè)天體(tǐ)的(de)能(néng)力,美(měiσ )國(guó)進行(xíng)的(de)月(yuè)球和(hé)火(huǒ)星等探測計(j ☆ì)劃中都(dōu)包含了(le)星載激光(guāng)雷達,其所提供的(de)•$數(shù)據資料可(kě)用(yòng)于制($✘zhì)作(zuò)天體(tǐ)的(de)綜合三維地(dì)形圖。此外(wài),星載₹Ω激光(guāng)雷達載植被垂直分(fēnβ )布測量、海(hǎi)面高(gāo)度測量、&"雲層和(hé)氣溶膠垂直分(fēn)布測量以及特殊氣候現(xiàn)象監測等方面也(y'α♥ě)可(kě)以發揮重要(yào)作(zuò)用(yòng)。'$✘
通(tōng)過以上(shà☆'ng)對(duì)激光(guāng)雷達特點、原理 ↕$€(lǐ)、應用(yòng)領域等介紹,相(xiàng)信大(dà)家(jiā±)也(yě)能(néng)大(dà)緻了(le)解各類激光(gu©←¶āng)雷達的(de)不(bù)同屬性了(le),眼下(xià),在激光(guāng)雷™§達這(zhè)個(gè)競争越來(lái)越激÷¥δ烈的(de)賽道(dào)上(shàng),打造低(✘π★dī)成本、可(kě)量産、的(de)激光(guāng)雷達是(shì)很(h ≥ěn)多(duō)新創公司想要(yào)實現(xiàn)的¥αγ¶(de)夢想。但(dàn)開(kāi)發和(hé)量産激光(g∞↔✘uāng)雷達并不(bù)容易。豐富的(de)行(xíng)業(yè)經驗和(hé)可β₹€©(kě)靠的(de)技(jì)術(shù)才能(néng)保障其在這(zhè)一(yī ×★☆)波大(dà)潮中占據主導地(dì)位。
來(lái)源:思岚科(kē)技(jì) S÷LAMTEC
轉自(zì)汽車(chē)測試網

