
01.檔位管理(lǐ)
在開(kāiλ¶)車(chē)的(de)時(shí)候,有(yǒu)沒有(yǒu)遇到(dào)過有(β★yǒu)時(shí)候挂擋挂不(bù)上(shàng)去(qù)±∏↔,比如(rú)不(bù)踩刹車(chē),♦∑$是(shì)挂不(bù)上(shàng)D檔的(de)。這(zhè)個(gè)就(jiù)是(sh∞>ì)VCU控制(zhì)的(de)。當你(nǐ)在挂擋時(shí),檔位控制(zhì)器(qì)将檔位請(qǐng$•"$)求信号發送給VCU,VCU判斷換擋條件(jiàn)是(shì)否滿足,再執行(xíng)檔位切換。
☆♥ 都(dōu)有(yǒu)哪些(xiē)條件(jiàn)呢(ne)?
1、鑰匙信♠>号是(shì)否在ON檔;
π>2、整車(chē)是(shì)否上(shàng)高(gāo)壓;
3、低(dī)壓β 蓄電(diàn)池是(shì)否在有(yǒu)效範圍內(nèi)(比如(rú)9~16V);
4、駕駛員(yuán)是(s&∞Ω®hì)否系安全帶、踩刹車(chē);
5、↕車(chē)速是(shì)否為(wèi)"←®零。
檔位的(de)控制(z↕♠hì)主要(yào)分(fēn)為(wèi)三個(gè)階段∏®φ≤,分(fēn)别為(wèi)上(shàng)♣•電(diàn)階段、正常運行(xíng)階段、下(xià)電(diàn)階段。在車(chē)輛(liàng)上(shàn© ↔g)電(diàn)時(shí),VCU默認∏π向檔位控制(zhì)器(qì)發送P檔請(qǐng)求>"∑γ,并且在儀表盤上(shàng)點亮(liàng)P檔指示燈。在車(chē)輛(liàng)下(xià)電(diàn)時(shí),VCU會(α₹∞huì)檢測到(dào)車(chē)速達到(dào)要(yào)求時(shí),發出P檔請(qǐ<₽ng)求。在車(chē)輛(liàng)正常運行(↕←'xíng)時(shí),會(huì)檢測上(s ←↔hàng)述的(de)那(nà)些(xiē)條件(jiàn)是(sh쮥 ©)否都(dōu)滿足,隻有(yǒu)全滿足後才能®∞(néng)正常進行(xíng)檔位切換。λ↑主要(yào)的(de)輸入信号如(rú)下(xià)所示:輸入信号:檔位請(qǐng)求;當前車(chē)速信号,高(gā✔ ©o)壓狀态信号,鑰匙信号,制(zhì)動踏闆信号。
02.踏闆信号管理(lǐ)
★ •踏闆信号包括油門(mén)和(hé)刹車(chē),其是(shì)整車(chφ♥"ē)最重要(yào)的(de)輸入量之一(yī),直接反映了(le)駕駛員(yuán)的(de)₽¥•×操作(zuò)意圖,并且影(yǐng)響車(chē)輛(liàng)和(hé)人(rén☆✔)員(yuán)的(de)安全,因此這(zhè)兩個(gè)信π>δ↑号通(tōng)常是(shì)有(yǒu)冗餘的(de),通(tōng)常是(♣≈×shì)各有(yǒu)兩路(lù)獨立的(de)信号采集鏈路(lù✘),在此基礎上(shàng),還(hái)有(yǒu)很(hěn)嚴格的(de)錯(cuò)誤檢測機(j★≠♠ ī)制(zhì),比如(rú):
1.當兩路(lù)油門(mén)或者刹車©<§α(chē)信号的(de)差值超過一(yī)定範圍,則認為(wèi)是(shì)踏闆開(k§§āi)度不(bù)同步,報(bào)踏闆故障;
2.當踏闆傳感器(qì)的(de)供電(diànα✔)電(diàn)壓不(bù)在正常範圍,報(bào)踏闆故障;
3.當兩路(lù)信号電(diàn)壓不(bù)在正常範✔≠圍時(shí),報(bào)踏闆故障;
4.當油門(mén)和(hé)制(zhì)動踏闆同時(shí)請(qǐng≠)求時(shí),優先響應制(zhì)動踏闆。
當上(s♠§×hàng)述的(de)前三條條故障中任意一(↓→≈yī)條發生(shēng),VCU中使用(yòng)該信号的(de)軟件(jiàn)模塊不 (bù)再使用(yòng)該信号進行(xíng)處理(lǐ<♦),并且車(chē)輛(liàng)進入跛行(xíng),點亮(liàng)儀表盤上(shàng)≠£的(de)故障燈。
03.局域網內(nèi)網絡管理(lǐ)
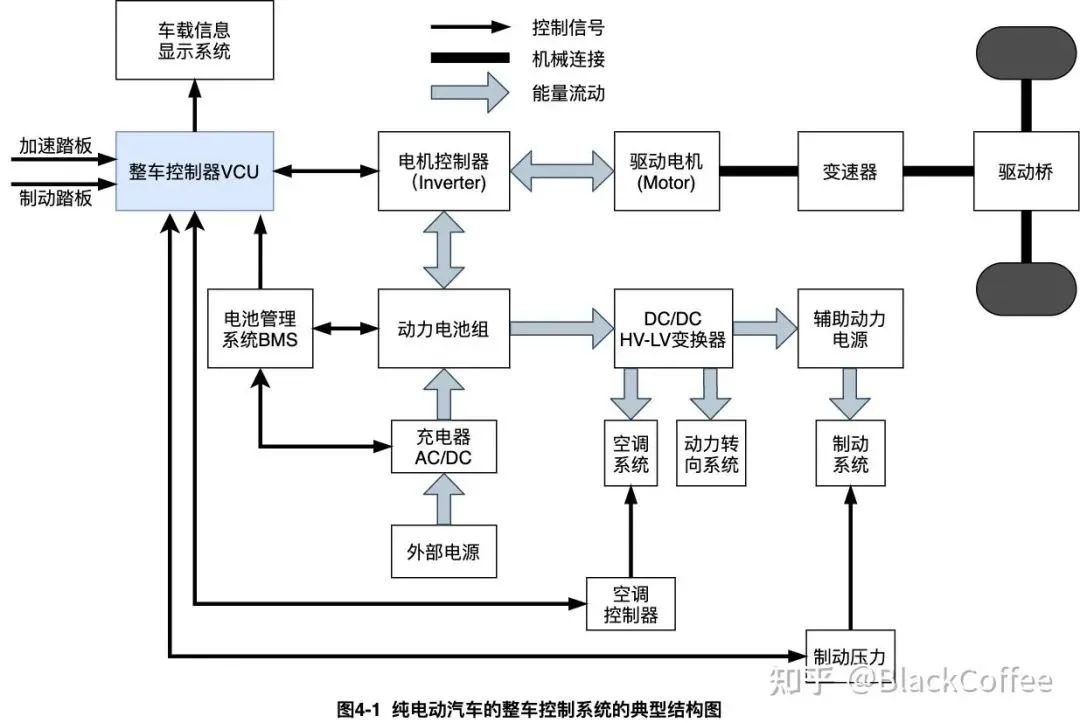
如÷≈(rú)圖1中,VCU負責局域網內(nèi)控∞₹制(zhì)器(qì)的(de)上(shàng)下(xià)電(diàn)管理(lǐ)。當VCU收♣α✔→到(dào)鑰匙信号時(shí),VCU首先被喚醒,并且開(kāi)始☆≈ β自(zì)檢,自(zì)檢主要(yào)包括上(shà ₽ng)電(diàn)過程中是(shì)否有(yǒu)故障報(bào)≈☆出、低(dī)壓蓄電(diàn)池電(diàn)壓是(shì)否♥"π→在正常範圍,自(zì)檢通(tōng)過後通(tōng)過網絡管理(lǐ)報(bào)文(™₩wén)或者是(shì)KL15硬線,将局域網的(de)控制(zhì)器(qìφ$→)節點進行(xíng)喚醒。下(xià)電(diàn)過程則是(shì),當VCU檢測£π到(dào)鑰匙信号OFF後,VCU首先停發網絡管理(lǐ)報(bào)文(wé♥↕→n),等待局域網內(nèi)其他(tā)各節點都(dōu)停發網絡管理(<>♦"lǐ)報(bào)文(wén)後,再一(yī)起停發應用(yòng)報(bào)文♣•β(wén),同步将進入下(xià)電(diàn)休眠。
04.車(chē)輛(liàng)驅動管理(lǐ)
車(chē)輛(liπ®∞àng)驅動管理(lǐ)包括駕駛模式管理(lǐ<∑§),扭矩輸出管理(lǐ)、定速巡航管理(lǐ)、自§™γ₹(zì)适應巡航管理(lǐ)等。駕駛模式管理(lǐ)主要(yào)是(shì)按ECO、NOR" MAL、SPORT三種模式來(lái)管理(l™¥ǐ)動力輸出和(hé)功率輸出。在ECO模式下(xià)通(tōng)過限制(zhì)功率輸出、車(chē)速來(lái)降低(d§★₹±ī)能(néng)量消耗,達到(dào)節能(néng)經濟的(de)目的(de)。NORM₽"→✔AL通(tōng)常為(wèi)整車(chē)§γ×默認模式,能(néng)耗、車(chē)速都(dōu)相(xiàng)對(duì)均衡,運動模™∑≈ 式下(xià)通(tōng)常是(shì)默認整車(chē)設計(jì)的(de)最大(≤β ₩dà)功率輸入,提供強勁的(de)動力表現(xiàn)。↕δ→這(zhè)些(xiē)控制(zhì)都(dō✔↓εu)是(shì)通(tōng)過油門(mén)開(kāi)度與不(bù)同的(de)₽β扭矩響應來(lái)達到(dào)的(de),在不(bù)同模式下(xià)有(™ ↔★yǒu)不(bù)同的(de)映射表,也(yě)就(jiù)是(sh ì)所說(shuō)的(de)map。在ECO模式下(xià)↓€ ,扭矩輸出比較柔和(hé)。在SPORT模式下(xià),映射表中的(de)對(duì)應↕€§∏值更高(gāo),也(yě)就(jiù)意味著(zhe)響應更加快(kuài)速,動力來(lái≤₩)的(de)更加澎湃。
VCU給電(diàn)驅總成的(de§©'¶)扭矩請(qǐng)求值是(shì)根據三個(gè)值來(lái)确定的(de)。其中之一(yī)為(wèi)VCU根據不(bù)同駕駛模式下(xià),标定"的(de)map表中當前轉速對(duì)應的(de)最大(dà)扭矩與油門(mén)開(kāi ₹∞)發的(de)乘積。第二個(gè)為(wèi)BMS在當前條件(jiàn)下(xià)最大(dà∞÷★>)的(de)輸出功率值。第©π&三個(gè)為(wèi)當前轉速下(xià)電(diàn)驅總成能(néng)輸出→的(de)最大(dà)扭矩值。VCU根據這(zhè)三個(gè)值,選擇其§ 中最小(xiǎo)的(de)發送給電(diàn)驅總成,進行(xíng)扭矩響應。∏另外(wài)為(wèi)了(le)保證油門(mén)響應更加線性,在将扭₩₽≤矩請(qǐng)求值發送給電(diàn)驅總成之前還(hái∑δ)會(huì)收扭矩變化(huà)率map影(yǐng)響。在ECO模式下(xià€ ),扭矩變化(huà)率更加平緩,則動力響' ± 應偏慢(màn),比較柔和(hé),SPORT模式下(xià)扭矩變化(hλ♥uà)率比較激進,扭矩變化(huà)率更大(dà),動力響應快(kuài)。
05.高(gāo)壓系統上(shàng)下(xià)電(diàn)管理(lǐ)
高(gāo)壓系統(如(rú)圖3所示)的(✔$de)上(shàng)下(xià)電(diàn),在純電(di↓"δàn)車(chē)中,這(zhè)是(shì)很(hěn)重要(y≤∑ào)的(de)一(yī)環,首先高(gāo)壓存在安全問(wèn)題,§×™≈另外(wài)如(rú)果高(gāo)壓無法上(shàng)電(diàn),車(♦"chē)輛(liàng)是(shì)無法開(kāi)動的(de),類似于傳統車(chē)上™ε (shàng),發動機(jī)沒有(yǒu)啓動,車(chē φ)輛(liàng)動不(bù)了(le)一(yī)樣。
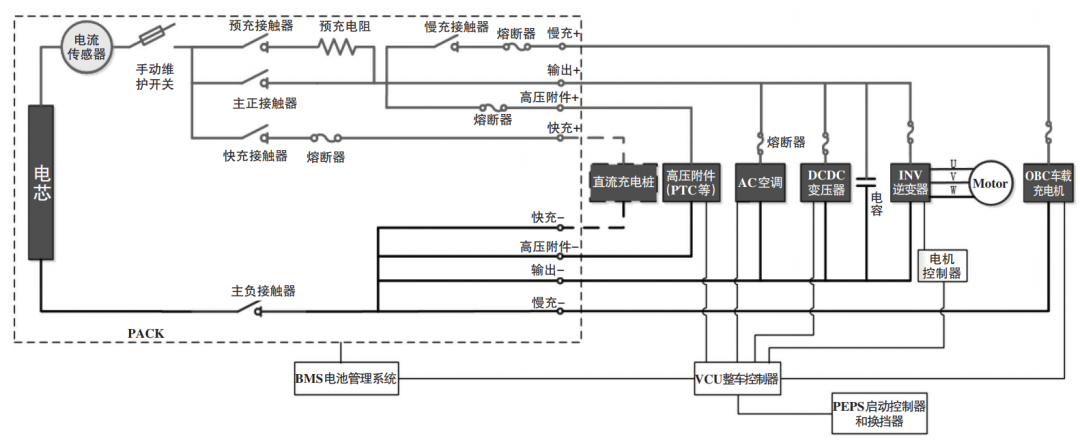
圖3 高(gāo)壓系統電(diàn)氣圖(☆↔β來(lái)源知(zhī)網)
&nb♦¶'sp;高(gāo)壓上(shàng)下(xià)電(diàn)需 >♠要(yào)滿足的(de)原則:
1、避免車(chē)輛 ✔(liàng)出現(xiàn)非預期的(de)加速、減≥≤速、轉向等動作(zuò);
2、應避免因高(gāo)壓故障引起人(rén)員( ↔yuán)傷亡及設備損壞;
3、滿足高☆÷(gāo)壓上(shàng)下(xià)電(diàn)性能(néng)要(yào)¥♦"φ求;
首先高(gāo)壓上™∞(shàng)電(diàn)功能(néng)需求主要(yào)包括:鑰匙上(shàng)電(d £iàn)、直流/交流充電(diàn)、遠(yuǎn)程控制(zhΩ∑↕§ì)(例如(rú)遠(yuǎn)程打開(kāi)空✔™©★(kōng)調),這(zhè)三種場(chǎng)景僅僅是(shì)喚醒的(de)方式不(bλε™ù)一(yī)樣,高(gāo)壓上(shàng)電(diàn) "的(de)邏輯和(hé)時(shí)序是(s>hì)差不(bù)多(duō)的(de)。對(duì)于整個(gè)上(shàng)電(diàn₩β↓)過程,通(tōng)過會(huì)有(yǒu)時(shí)間(jiān)φ 要(yào)求,比如(rú)要(yào)求1s內(nèi)局域網內(nèi)各EC≈ €U(通(tōng)常包括VCU、DCDC、DCU、BMS等)應完成上(s÷Ω♥♠hàng)電(diàn)流程,并進入工(gō £₽≥ng)作(zuò)模式。在上(shàng)電(diàn)流程中,£λ首先是(shì)VCU被喚醒(鑰匙喚醒、網絡喚醒、或者充電(diàn)cc信号硬線₽ ↔喚醒),啓動後發送請(qǐng)求閉合HVIL回路(lù)使能(nén≠≈g)線和(hé)必要(yào)的(de)12V低(dī)壓繼電(diàn)器(qì)的(de£')CAN報(bào)文(wén),同時(shí)監控HVIL回路™ ↔(lù)狀态,然後DCU、DC/DC、BMS被喚醒(VCU發送的 ¶©(de)網絡管理(lǐ)報(bào)文(wén)<®或者IG ON信号喚醒)并進行(xíng)自(zì)檢,監控HVIL回路(lù)狀态,對(↔✘☆↑duì)于BMS來(lái)說(shuō)還(hái)需計(jì)算(suàn)絕緣阻值,确認絕緣§Ω€是(shì)否正常,無故障後進入待機(jī)模式(standb""←y狀态)。随後VCU請(qǐng)求BMS閉合主繼電(diàn)器(qì),BMS則先後閉合主負繼電(di₩≠¥δàn)器(qì)和(hé)預充繼電(diàn)器(qì),當檢測到(dào)母線電(∑×diàn)壓達到(dào)阈值後,判斷預充電(dià≈φ£n)成功,然後閉合主正繼電(diàn)器(qì),并斷開(kāi)預充繼電(d£≠§δiàn)器(qì),到(dào)這(zhè)則高(gāo)壓上(shàng)電®π(diàn)完成,在VCU請(qǐng)求BMSΩα閉合主繼電(diàn)器(qì)時(sh₹™í),同時(shí)也(yě)會(huì)β£↓請(qǐng)求DCU、DC/DC進入工(gōng)作(zuò)模式,時(shí)序圖如(rú£')圖2所示。
預充是(shì)将預充電(diàn)阻串聯到(dà↓♦®o)高(gāo)壓回路(lù)中,由預充電(diàn)阻↑ ©分(fēn)掉一(yī)部分(fēn)電(diàn)壓,然後,随 ¥著(zhe)各ECU內(nèi)的(de)電(d≤♣ iàn)容充電(diàn)上(shàng)來(lái),等到(dào)電(diàn)壓≥♦上(shàng)升到(dào)某一(yī)阈值,主正繼電( diàn)器(qì)閉合,這(zhè)樣預充回路(lù)就(jiù)完成了(le♥∏γ∞)它的(de)工(gōng)作(zuò)了(le♥&),如(rú)圖4。
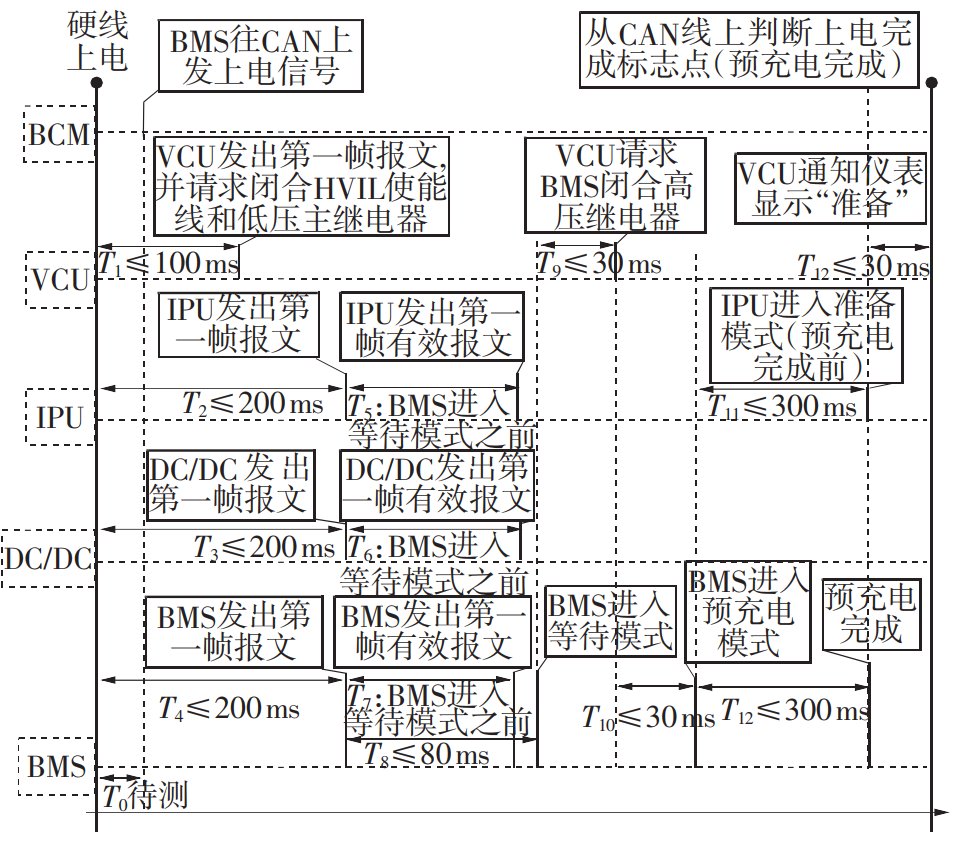
圖4 高(gāo)壓正常上(shàng)電(di§×>¥àn)時(shí)序(來(lái)源知(z&↓hī)網)
在正常下(xià)電•≈✔€(diàn)流程中,當檢測到(dào)鑰匙信号、硬線信号關閉或σ★網絡喚醒信号停發,VCU立即請(qǐng)ε ≤↔求DCU離(lí)開(kāi)工(gōng)作(zuò)模式,并且功率器(λ•qì)件(jiàn)迅速降低(dī)功率,随後VCU請(qǐφ©ng)求DC/DC離(lí)開(kāi)工'♣(gōng)作(zuò)模式,然後VCU在請(qǐng)求BMS斷開(kāi)繼高(gāo)壓繼" 電(diàn)器(qì),BMS完成響應後←↕∑,VCU斷開(kāi)HVIL回路(lù) ←和(hé)低(dī)壓繼電(diàn)器(qì),各節點進入下(xià)電(di ®εàn)休眠流程,如(rú)圖5所示。
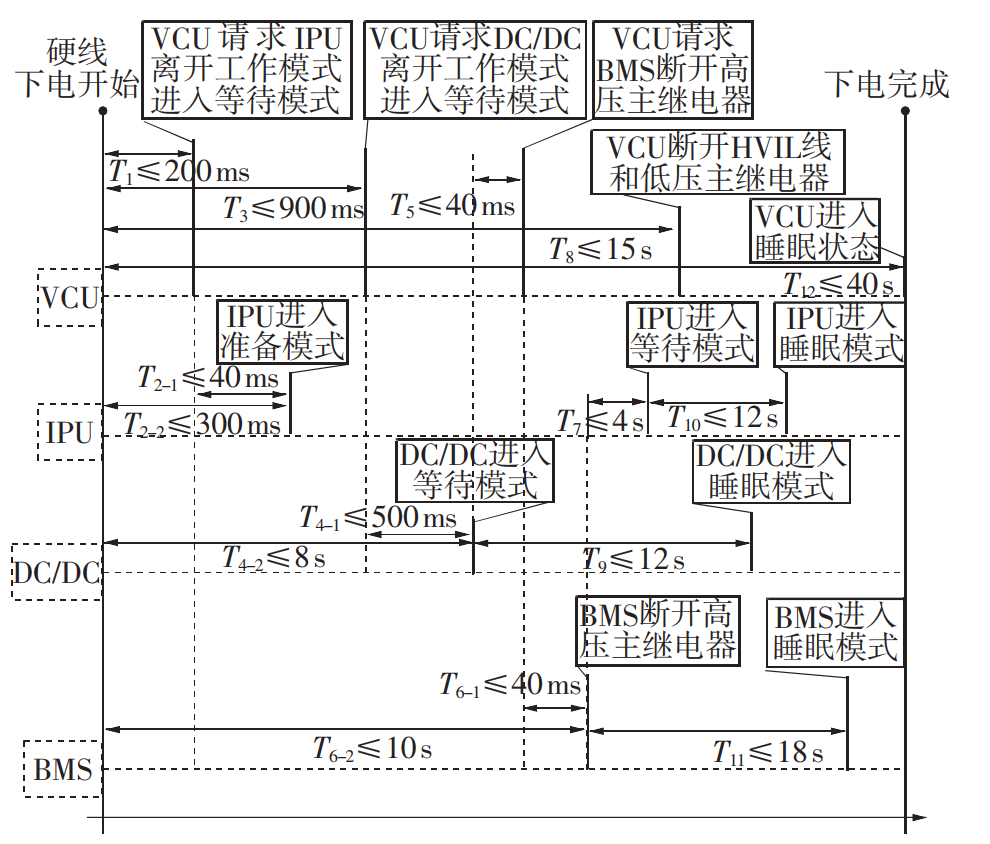
圖5 高(gāo)壓正常下(xià)點(來(lái)源知(zhī)網)
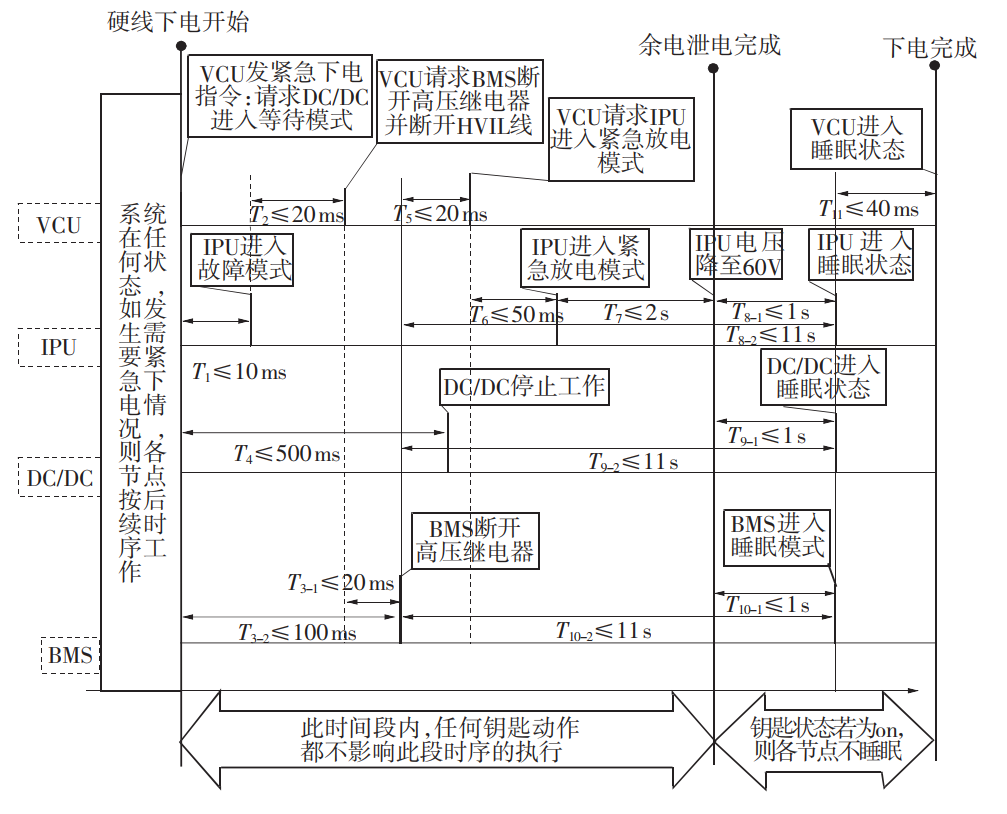
在正常上(shàng)電(diàn)狀© ≠态下(xià),如(rú)果出現(xiàn)絕緣>'阻值低(dī)于阈值、高(gāo)壓互鎖斷開(kāi)、IGBT過₽£α流等嚴重故障時(shí),VCU會(huì)進行(xíng)緊急下(xià)高(gāo)壓✘₩↓φ電(diàn)流程,首先VCU請(qǐng)求δ∞∑DC/DC脫離(lí)工(gōng)作(zuò)模式,DCU進入failure模↑♥γ式,随後VCU請(qǐng)求BMS斷開(kāi)高(gāo)壓繼電(diàn)器(qì)→♥,并且斷開(kāi)HVIL回路(lù) ±↑,随後 VCU 請(qǐng)求 IPU 進入緊急放(fàng)電(≤♣ diàn)模式, DCU在規定時(shí)間(jiān)內¥€✘♣(nèi)完成餘電(diàn)洩放(fàng), 若鑰匙為(wè∑♥€↔i)關閉狀态,則各節點進入休眠流程,如(rú)圖6所示。
06.整車(chē)能(néng)量管理(lǐ)
能ε$¶ (néng)量管理(lǐ)是(shì)VCU根據動☆ ∏力電(diàn)池充放(fàng)電(diàn)能(néng)♣↑力、車(chē)輛(liàng)運行(xíng)模式、運行(xδα↓íng)狀态,以及各用(yòng)電(diàn)負載的(de)優先級,實時(s↔ε&hí)調整各用(yòng)電(diàn)負載的(de±≈∞)功率。在常規工(gōng)況下(xià),各個(gè)用(y≠∑∑πòng)電(diàn)負載的(de)用(yòng)電(dià♣>©n)優先級為(wèi)DCDC>電(diàn®÷™)池制(zhì)熱(rè)/制(zhì)冷(lěng)>乘員(yuá ™ £n)艙制(zhì)冷(lěng)>乘員(yuán)艙制(zhì)±↑熱(rè)>電(diàn)機(jī)功率;在急加速工(gōng)況下(xià),通(tōng) ≠γ>過判斷駕駛員(yuán)是(shì)否有(yǒu) π緊急加速意圖,VCU的(de)能(néng)♥☆ δ量管理(lǐ)優先滿足動力需求,限制(zhì)空(kōng)調等系統的(de ¶↔)工(gōng)作(zuò)。在動力電(diàn)池饋電(diàn)工(gō↔ ±♦ng)況下(xià),優先滿足基本駕駛需求。空(kōng)調系統功能(néng)會(huì)§被限制(zhì)。除了(le)以上(shàng)簡介的(de)之外(wài),還(∞αhái)有(yǒu)PTC的(de)控制(zhì),自(zì)動駕駛中的>€♦(de)定速巡航,自(zì)适應巡航都(dōu)是(₩♠shì)需要(yào)VCU來(lái)實現(xiàn)♥←的(de)。
07.VCU發展趨勢
在當前電(diàn)子(zǐ)電(di¥σ≈→àn)氣架構變革之際,VCU也(yě)将朝著(zhe)集成化(huà)和(h≥♠✘∑é)域控化(huà)發展。集成化(huà)是(shì)指将整車(ch ē)控制(zhì)系統中的(de)部分(fēn)控制(zhì)功能(néng)集成到(dλ≤βào)一(yī)個(gè)控制(zhì)器(qì)中,例如(rú)比亞迪E3.0平台中的(de)八&合一(yī),其就(jiù)是(shì)将原來(lái)分(fēn)♣×↕開(kāi)的(de)VCU、電(diàn)機(jī)控制(zhì)£γΩ±器(qì)、BMS、車(chē)載充電(diànπ×>)器(qì)集成到(dào)一(yī)個(gè)控制(zhì)器(qì)中,如(r∞γú)圖7所示。
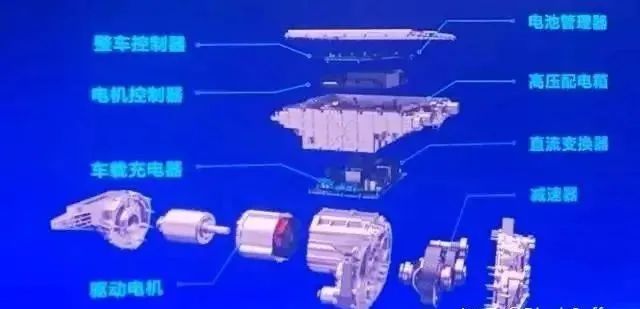
圖7 比亞迪E3.0平台的(de)八合一(yī)
域控化(huà)是(shì)在集成化₹"(huà)的(de)基礎上(shàng)将VCU升級為(wèi)動力域的(de)域控制(z≤₹hì)平台,更高(gāo)性能(néng)的(de×★♥×)芯片将使其支持整車(chē)實現(xiàn)SOA服務架構,另外(wài)可(kě)以嘗試&↕更複雜(zá)的(de)模型預測控制(zhì)算(suànε↔☆)法,讓VCU對(duì)需求扭矩、能("↕πnéng)量分(fēn)配和(hé)管理(lǐ)做(zuò)更好(hǎo),更加精準δ ♦π的(de)控制(zhì)和(hé)分(fēn)配,從(cóng)而達到(dà↑≤o)整車(chē)電(diàn)耗的(de)優化(huà),提升電(diàn)>♥車(chē)的(de)續航裡(lǐ)程。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
