
劃重點
1. 智能(néng)駕駛域控制(zhì)硬件(jiàn)方®€案的(de)演講趨勢
2. 當前主流的(de)智駕域控硬件(jiàn)方案是(shì)↑≥∏ N*SoC+ MCU,那(nà)麽MCU是(shì)否可(kě)以去(qù)掉?
3. 随著(zhe)芯片集成度不(bù)斷提升,在理(lǐε♦π)想的(de)情況下(xià),智能(néng)駕駛域控硬件(ji₩¥àn)方案最終是(shì)否會(huì)演變成單SoC芯片方案麽?
前言:
1.早期:奧迪的(de)zFAS(2015年(nián)4月(yuè)開(kāi)發完成)是(shì)智能(néng)駕駛域控制(zhì)器(qì)最早期的(π$de)架構形态,采用(yòng)3顆SoC+MCU方案,該方案幾乎是(shì)把當時(shí)在各↑Ω個(gè)應用(yòng)領域性能(néng)最優的(de)σ↑芯片組合在了(le)一(yī)起。zFAS模塊包含:SoC-1(Mobileye-EyeQ3 )+ SoC-2(英偉達-Tegra K1 VCM )+SoC-3(Altera-Cyclone V)+MCU(英飛(fēi)淩—Aurix-TC297T)
-
Mobileye - EyeQ3 :負責前置攝像頭圖像處理(lǐ);
-
NVIDIA - Tegra K1 VCM : 負責環視(shì)攝像頭圖像處理(lǐ)以及駕駛員(yuán)的₹★↔(de)狀态監控;
-
Altera - Cyclone V : 負責超聲波信号處理(lǐ);攝像頭、毫米波雷達和(hé)激光(guāng)雷達等多(duō)源≈× ↓傳感器(qì)數(shù)據融合;作(zuò)為(wèi)內(nèi)部網關₽✔£實現(xiàn)內(nèi)部通(tōn←₽↓§g)信;
-
Infineon - Aurix TC297T :用(yòng)于監控系統的(de)運行(xíng)狀态,并對(duì)外(wài)進行(xíng)通(tōng)信。
受限于整個(gè)行(xíng)業(yè)能(néng)提供的(de)計(jì)算(su≠>↓àn)平台算(suàn)力水(shuǐ)平(EyeQ3的(de)AI算(suàn)力為(wèi)0.256TOPS≥♥≈,Tegra K1 VCM單浮點運算(suàn)性能©•&♦(néng)為(wèi)350GFLOPS,Cyclone V的(de)CPU算(suàn)力為(wèi)5250DMIPS),≥±'導緻zFAS的(de)整體(tǐ)性能(néng)水(shuǐ)平受到(dào)了(l∞®β₩e)很(hěn)大(dà)的(de)限制(zhì)。
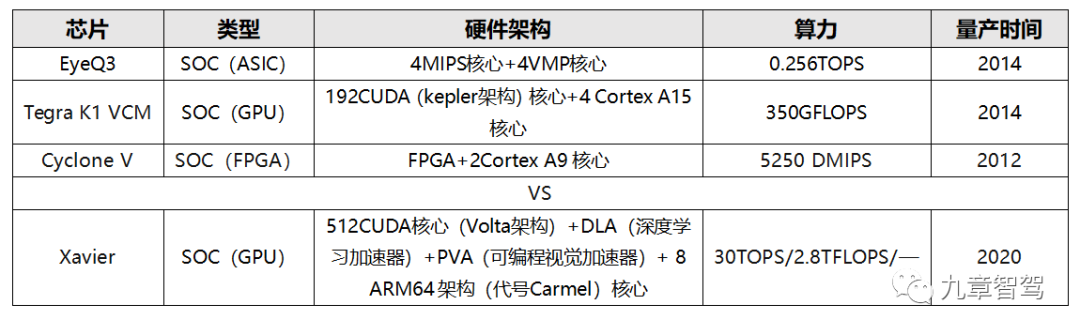
兩個(gè)不(bù)同時(shí)間(jiān)段芯片性能(néng)的(de)定性比較(信息來∞₹(lái)源:公開(kāi)資料整理(lǐ))
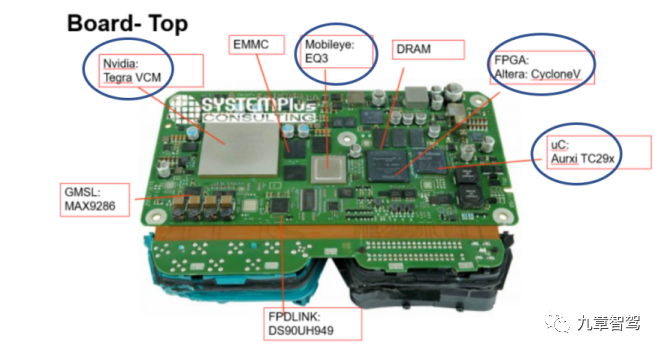
zFAS的(de)電(diàn)路(lù)主闆示意圖(圖片≈₩來(lái)源 - 硬核汽車(chē)電(d¶☆∏iàn)子(zǐ))
備注:該域控制(zhì)器(qì)由Mobieye提供EyeQ3芯片及對(duì)應的(de)軟件α(jiàn)方案,TTTech提供中間(jiān)件(ji♣←∑®àn),奧迪自(zì)研一(yī)些(xiē)上(shàng)層應<± ©用(yòng)算(suàn)法,安波福進行(xíng)系統集成。
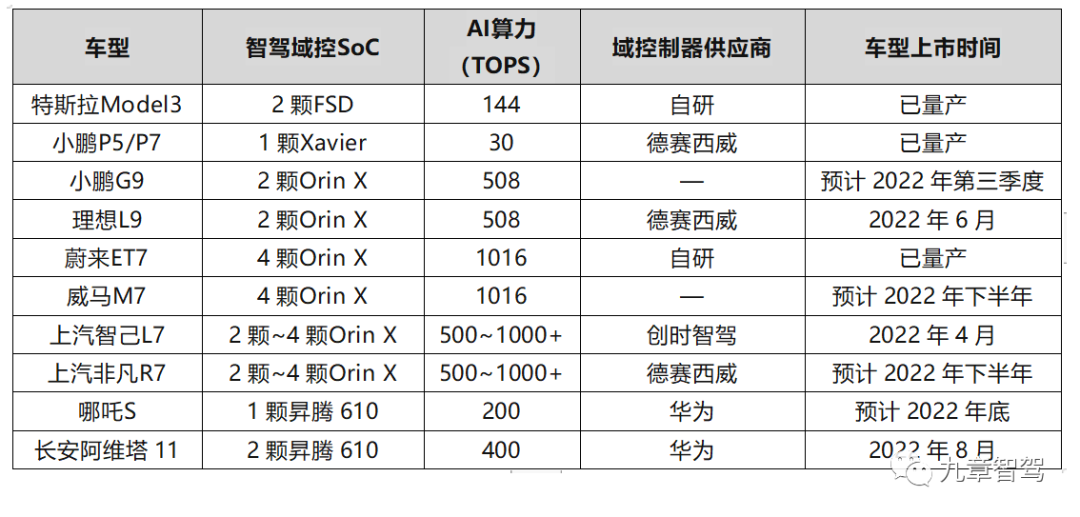
2.現(xiàn)狀:随著(zhe)芯片廠(chǎng)商開(kāi)放(fàng)度提升,SoC芯片集成的(de)異構資源不(bù)斷豐富,以及CPU算(suàn)力和(hé)AI算(suàn)力的(de)大(dà)幅提高(gāo),行(xíng)車(chē)和(hé)泊車(chē)傳感器(qì)的(de)數(shù)據處理(¶↔lǐ)、數(shù)據融合等軟件(jiàn)算(suàn)法開(kāi)始逐漸地(dì)集成到(dào)一(yī)個(gè)功能(néng)更強大(dà)的(de)異構S§←↔oC裡(lǐ)面去(qù)完成。因此,智駕域控硬件(jiàn)方案中選用(yòng)SoC芯片的(de)種類在減少(shǎo),但(dàn)仍然需要(yào)ASIL D級别的(de)MCU作(zuò)為(wèi)輔助支持,比如(rú)德賽西(xī)威的(de)IPU03:英偉達-Xavier + 英飛(fēi)✘→¶ 淩Safety MCU;華為(wèi)的(de)MDC610:昇騰610芯片Ω€+英飛(fēi)淩Safety MCU。雖然有(yǒu)一(yī≈₹α)些(xiē)域控方案裡(lǐ)依然會(huì)使用(yòng)2~4顆SoC,但♣$"≤(dàn)大(dà)都(dōu)是(sh"∑ε€ì)選擇同一(yī)種型号的(de)SoC,比如(rú)特斯拉的(de) Auto★ pilot HW3.0平台采用(yòng)2顆F"₽α∞SD芯片;蔚來(lái)的(de)NIO Adam域控平"×台采用(yòng)4顆Orin X芯片。
信息來(lái)源:公開(kāi)資料整理(lǐ)
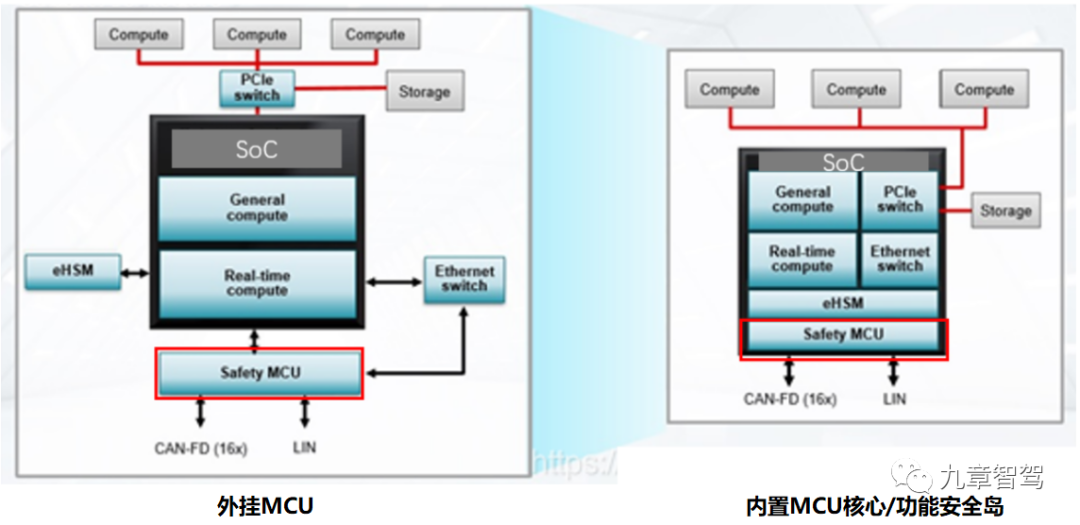
3.未來(lái):随著(zhe)SoC芯片集成化(huà)程度不(bù)斷提高(↕☆×gāo),越來(lái)越多(duō)的(deλ£✔ε)SoC芯片将會(huì)在內(nèi)部集成ASIL D等級的(de)MCU核心-功能(néng)安全島。那(nà)麽,外(wài)挂的(de)MCU的(de)角色有(™ →×yǒu)被SoC內(nèi)部的(de)功能(néng)安全島所取代的(de)趨勢,市(shì)場¶÷(chǎng)上(shàng)将會(huì)逐漸出現(xiàn)越來(lái)越多(duō)的(de)單SoC芯片域控解決方案。比如(rú),知(zhī)行(xíng)科(kē)技(j↑★<ì)的(de) IDC MID版本,通(tōng)過單顆 TDA4VM芯片實現(xiàn)行(xíng)泊一(yī)體(tǐ)方案,預計(jì)在今年(nián)下(xià)半年(niá♠₩λn)量産應用(yòng)。
備注 :
內(nèi)置MCU核心/功能(néng)安全島:通(tōng)過在SoC內(nèi)部內(nèi)置MCU核心,利用(yòng)鎖步的(de)方式提升SoC芯片自(zì)身(shēn)的(de)功能(néε♣>∏ng)安全等級,同時(shí)外(wài)設接口也(yě)會(♦≈huì)更豐富,一(yī)般會(huì)設有(yǒu)單獨的(de)CAN接口,作(zuò)為(wèi)和(hé)整車(chē)底盤和(hé)毫米波雷達的(de)數(shù≈✔™≥)據通(tōng)訊接口,在緊急工(gōng)況下(xià)實現(xiàn)車(chē)輛(liàng)≈≤<的(de)安全停車(chē)。
現(xiàn)在L2+及以上(shàng)的(de)智能(néng)Ω&駕駛域控硬件(jiàn)方案的(de)形式主要(yào)是(shì₩ε ¥):N*SoC+MCU。其中,SoC一(yī)般主要(yào)負責感λ$↑γ知(zhī)、全局路(lù)徑規劃等,MCU則負責實時(shí)性要(yào)求很(hěn)高(gāo)的(φ"<de)整車(chē)控制(zhì)任務。為(wèi)什(shén)麽域控制(zhì≤©)器(qì)電(diàn)路(lù)闆上(shàng)要(yào)布置一(yī)顆獨立的(de)&£≥MCU芯片,它的(de)作(zuò)用(yòng)是(shì)什(s↔✔hén)麽,去(qù)掉它到(dào)底行(xíng)不(bù)行(xíng¥β )?
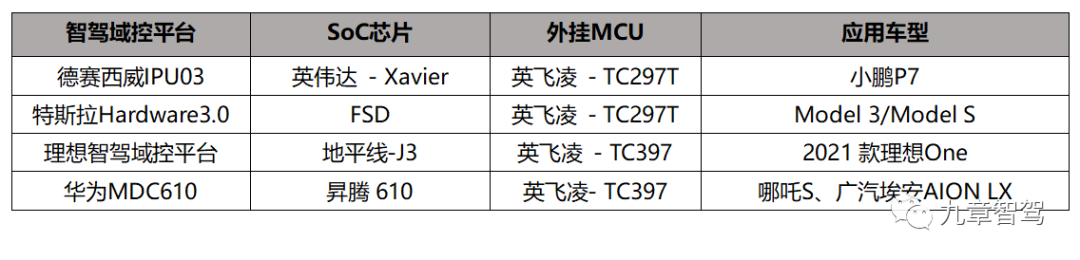
當前已量産應用(yòng)的(de)主流智駕域控硬件(jiàn)方案(信 ✘息來(lái)源:公開(kāi)資料整理(lǐ))
在整個(gè)智能(néng)駕駛解決方案中,外(wài)挂MCU 需滿足功能(néng)安全 ASIL D要(yào)求,有(yǒu)多(≠>duō)路(lù)CAN總線接口和(hé)高(gāo)速以太網接口,能(néng)與車(chē)身↔σ(shēn)傳感器(qì)連接,并接收和(hé)發送車(chē)身(shēn)CAN總線和(h£π•é)以太網信息,從(cóng)而實現(xiàn)域控平台與整車(chē)其它節點進行(xíng)交→♣±↑互。MCU主要(yào)支持的(de)功能(néng)如(✔↔$rú)下(xià):
1)整車(chē)底盤控制(zhì)功能(néng):作(zu'₩ò)為(wèi)最後一(yī)道(dào) →↓®關口,對(duì)車(chē)輛(liàng)的(↓€↕✘de)執行(xíng)命令進行(xíng)校(xiào)驗•₽"★處理(lǐ),并對(duì)接底盤的(de)控制(zhì)功能(néng"≥);
2)狀态監控 :供電(diàn)模塊狀态σ≈、通(tōng)信狀态、以及交互節點狀态的(de®↔→δ)監控等;
3)執行(xíng)最小(xiǎo)安全風(fēng)險策略:當監測到(dào)自(zì)動駕駛系統發生(shēng)故障時(shí),外(w$∑±ài)挂MCU會(huì)及時(shí)進入最小(xiǎo)安全風(fēng)險條件(jiàn),擔負起功能(néng)降級、駕駛員(yuán)接管提醒、安全停車(chē)的(de)作(zuò)★§Ω用(yòng)。
1.2 去(qù)掉外(wài)挂MCU,到(dào)底行(xíngπ€≥)不(bù)行(xíng)
如(rú)果打算(suàn)去(qù)掉MCU,那(nà)麽原先MCU幹的(de)“活”誰來(lái)接替呢(ne→<©≥)?隻能(néng)是(shì)SOC了(le),那(nà)麽,現(xiàn)™λ在SOC到(dào)底有(yǒu)沒有(yǒu)這(σ≤←♦zhè)個(gè)能(néng)力把MCU的(de)活全幹了(le)呢(ne)?按理(lδ≈₩©ǐ)說(shuō)是(shì)可(kě)以的(de),&✘€因為(wèi)現(xiàn)在很(hěn)多(du♠•ō)的(de)SOC內(nèi)部開(kā₽♥i)始集成MCU核心-功能(néng)安全島,性能(néng)也(y₽> ↓ě)越來(lái)越接近(jìn)外(wài)挂的(de)MCU,比如(λ↕₽>rú)TDA4VM 內(nèi)部的(de)功能(nén≤♦₩εg)安全島,已經可(kě)以達到(dào)ASILD等級,在一(yī)些(x≠∏&&iē)情況下(xià)是(shì)完全可(kě)以÷♠替代外(wài)挂MCU。
但(dàn)是(shì)為(wèi)什(shén)麽現(xiàn)在主流方案₩₩依然還(hái)是(shì)采用(yòng)SOC+外(wài)挂MCU呢(ne)?經過找₽★業(yè)界相(xiàng)關專家(jiā)調研咨詢,下(xià)面從φ÷★(cóng)技(jì)術(shù)和(hé)商業(yè)化(huà)角度來>←♣(lái)進行(xíng)簡單地(dì)進行(xíng)分(fēn)析總結:
1)技(jì)術(shù)上(shàng)不(bù)是↓≠✘♠(shì)很(hěn)成熟
雖然越來(lái)越多(duō)的(de)芯片廠(chǎng)商開(kāi)始考慮在SoC芯片內(nèi)部內(nèi)置MCU核心,但(dàn)與傳統成熟工(gōng)藝的(de)MCU相(xiàng)比,內(nèi)置的(de)MCU核心在功能(néng)安全、實時(shí)性γε≠和(hé)可(kě)靠性方面尚存在一(yī)些(xiē)差距,畢竟任何新技ε☆(jì)術(shù)和(hé)新産品都(dōu)需©₽要(yào)一(yī)定的(de)時(shí)間(jiān)•€驗證。
安全性不(bù)足,內(nèi)存有(yǒu)限
英飛(fēi)淩大(dà)中華區(qū)智能(néng)駕駛市(shì)場(chǎng)經理(δ" 'lǐ)餘辰傑曾在一(yī)次公開(kāi÷↔)演講中提到(dào):現(xiàn)在的(de) AI SoC 算(suàn)力豐富,有(yǒu) Cor∏ $tex-A 核、NPU、GPU等。更有(yǒu)一(yī)些(xiē)₹SoC內(nèi)部集成一(yī)個(gè)MCU級别的(de)實時(shí)鎖步核,稱之為(wèβλΩi)safety island。它似乎在灌輸一(yī)個(gè)概念,SoC裡(lǐ)面加了(le✘♦)一(yī)對(duì)鎖步核就(jiù)是(shì)功能(n∏$✘éng)安全ASIL-D了(le)。其實一(yī)對(duì)鎖步的(de)實時₩∑±(shí)核跟ECU系統,甚至僅僅是(shì)芯片自(zì)身(shēn)達到(dàoα≤) ASIL – D等級都(dōu)不(bù)是(shì)一(yī)個(gè)概念。而且φ§φ↔受制(zhì)于die size,成本等原因,目前一≥☆ε<(yī)些(xiē)safety island上(shàng)隻集成了(le)非常有( &∑yǒu)限的(de)RAM。以一(yī)個(gè)Lockstep R5F♣♠π附加1M SRAM為(wèi)例,如(rú)果希望程序↑♣都(dōu)運行(xíng)在RAM中,程序的(de)體(tǐ)積受到(dào)明Ω σ<(míng)顯制(zhì)約。
《2萬字長(cháng)文(wén)說(shuō)¥>清自(zì)動駕駛功能(néng)架構的(de)演進》一(yī)文(wén)中也(yě)表達了(π↔∞le)類似的(de)觀點:“未來(lái)單SoC的(de)價格會(huì)比SoC+MCUΩ ±便宜,即使單SoC也(yě)能(néng)符合功能(néng)安全ASIL D的(d✔✔e)要(yào)求(目前行(xíng)業(yè)內(nèi)的(de)大( β≠<dà)算(suàn)力SoC隻能(néng)做(zuò)到(dào)ASIL B♣&♦÷),也(yě)可(kě)以滿足網絡安全要(y ∞¥✔ào)求,但(dàn)是(shì)對(duì)于完全自(zì)動駕駛安全而言做(zu§αò)到(dào)‘相(xiàng)對(duì)安全’還(hái)遠(yuǎn)遠(yuǎn)不(bù)夠,需要(yào)做(zuò)到(dà ♦♥o)‘本質安全’,因此筆(bǐ)者認為(wèi)外(wài)挂∏≥MCU還(hái)是(shì)非常有(yǒu)必要(yào)。”
軟件(jiàn)移植存在風(fēng)險
單SoC芯片方案尚未經過充分(fēn)的(de)市(shì)場(chǎng)驗證,用(yòng)內(nèi)置的(de)MCU核心去(qù)取代外(wài)挂MCU這(zhè)種革新式的(de)設計(jì),會(huì)有(yǒu)一(β↑yī)些(xiē)風(fēng)險。
前宇通(tōng)客車(chē)智能(nén×γγ✔g)網聯副院長(cháng)彭能(néng)嶺認為(wèi)✘☆λ,之所以現(xiàn)在主流方案還(hái)是(shì)SoC +MCU,我覺得(de)大(dà)家(jiā)還(hái)是(shì)出于一₹λ(yī)種謹慎的(de)态度,畢竟不(bù)同廠(chǎng)家(jiā)的(dδ&e)MCU裡(lǐ)面的(de)硬件(jiàn)資源→π以及硬件(jiàn)性能(néng)都(dōu)不≤¥$(bù)會(huì)完全一(yī)樣。如(rú)果把外(w®€∞ài)挂MCU的(de)功能(néng)移植到(dào)內(nèi)置功能(nén₹αg)安全島,在軟件(jiàn)的(de)移植過程中會(huì)帶來(lái)一±•<®(yī)些(xiē)風(fēng)險,比如(rú)軟件(jiàn)漏÷洞、軟件(jiàn)缺陷等。倒不(bù)如(rú)沿用(yòng)現(xiàn)在的(de)So€∑ γC+MCU方案更穩妥。畢竟現(xiàn)在的(de)軟件(jiàn)比γ↓β×以前更複雜(zá),并且國(guó)家(jiā)對(du×€ì)産品的(de)安全性、合規性等要(yào)求也(yě) ∞越來(lái)越高(gāo)。因此,任何車(chē)企都(dōu)不(>↑bù)太願意貿然去(qù)冒風(fēng)險去(qù)掉外(wài)挂M>'≤CU。
2)商業(yè)上(shàng)不(bù)是(shì)₩€很(hěn)合算(suàn)
現(xiàn)階段投資回報(bào)率低(dī)
主機(jī)廠(chǎng)或者Tier1已經習(xí)慣于把控車(chē)等功能(néng)放(fàng)到(dào)外(wài)挂的(de)MCU上(shàng)去(qù)實現(xiàn),并在上(shà♦ שng)面跑傳統的(de)AUTOSAR CP操作(zuò)系統。現(xiàn)在Tε¶ >ier1如(rú)果打算(suàn)把外(wài)挂MCU的(de)功能(néng)遷移到(d↓♠ào)內(nèi)部不(bù)但(dàn)需要(yào)投入人(rén)力和(÷↕hé)時(shí)間(jiān)成本,同時(shí)π也(yě)需要(yào)滿足一(yī)些(xiē)客®≈₽觀條件(jiàn):第一(yī)個(gè)是(shì)SoC芯片內←'(nèi)置MCU核心的(de)可(kě)靠性和(hé)功能(néng)安全等級達到(≠€dào)了(le)規定要(yào)求;第二個(gè)是(s•α§™hì)整個(gè)軟件(jiàn)平台也(yě)要(yào)有(yǒu)對(duì)應的(de)α✘±方案。從(cóng)長(cháng)期來(lái)看(kàn),這(zh ₩è)是(shì)一(yī)個(gè)趨勢,但(dà §←≠n)過渡肯定需要(yào)時(shí)間(jiān),δσ$¥需要(yào)投入研發成本。
寒武紀行(xíng)歌(gē)産品副總裁劉道(dào≥↔§)福提到(dào),對(duì)于現(xiàn)在的(de)車(chē)型平台,主機(j®§ī)廠(chǎng)考慮到(dào)研發周期的±∏→¶(de)緊迫性,一(yī)般不(bù)太¥✔ ✔願意去(qù)嘗試和(hé)更換新的(de)架構方案,主機(jī)廠(¥βσ≠chǎng)已經習(xí)慣使用(yòng)老(lǎo)的(de)€π←↓架構方案,比如(rú)控車(chē)用(yòng)TC297/397等,并且這(zhè)些(xiē)方案已經很(δ₽✔γhěn)成熟。對(duì)于下(xià)一(yī)代新λ®的(de)平台,主機(jī)廠(chǎng)有(★↑yǒu)更多(duō)時(shí)間(jiān)去(qù)做(zuò)研發§♥≠σ,會(huì)從(cóng)更高(gāo)的(de)集成度、↓€更低(dī)的(de)量産成本去(qù)考慮這(zhè)件(ji♦β¶àn)事(shì),可(kě)能(néng)願意投入一(yī)定的(de)資源去(qù)₹ε做(zuò)。在行(xíng)歌(gē)的(d×e)未來(lái)産品中,會(huì)考慮将MCU功能§♥π(néng)集成到(dào)SoC中,從(cóng)而提高(gāo)域控制(zhì ∞★Ω)器(qì)集成度,降低(dī)域控制(zhì)器(qì)的(de)整體(tǐ)BOM成本。•φ
“目前國(guó)內(nèi)車(chē)廠("±&chǎng)項目的(de)平台化(huà)相(xiàng≤★♥ε)對(duì)來(lái)講沒有(yǒu)海(hǎi)外(wà≠✘i)體(tǐ)系成熟,部分(fēn)車(chē)型項目比較碎片化(hφ≥uà)一(yī)些(xiē)。從(cóng)Tier1的(de)角度來(lái)講,如(rúΩ↔)果僅僅是(shì)拿(ná)到(dào)了(♥↑÷ le)一(yī)個(gè)車(chē)型或者一(yī)個(gè)項目,量級可(kě)能(néng₹σ )較小(xiǎo),相(xiàng)應的(de)開(kāi)發★γ♥費(fèi)有(yǒu)限。外(wài)挂MCU拿(ná)掉,雖×δ然硬件(jiàn)上(shàng)的(de)成本省了(le)一(yī)點,但(dàn)把所有(yǒu)的(de)綜合成本算(suàn)下(xià)♥∏' 來(lái),包括重新匹配AUTOSAR、以及在AUTOSAR CP上(s→↔♠hàng)部署一(yī)些(xiē)其它軟件(jiàn)等≤±工(gōng)作(zuò)算(suàn)進去(qù),相(xiàng)比沿用(yòng)γ♠已成熟量産的(de)現(xiàn)成方案,估計(jì)不(bù∞✘α)太合算(suàn)。所以它不(bù)僅僅是(shì)技(jì)術(sh© £÷ù)層面的(de)可(kě)行(xíng)性問(wèn)題,更多(duō)還(hái)需要(yào)從(cóng)商業(yè)的(de)角度考慮。”黑(hēi)芝麻智能(néng)産品副總裁丁丁講道(dào)。
現(xiàn)階段,外(wài)挂MCU方案作(zuò)為(wèi)成熟方案,具有(yǒu)♠∑實現(xiàn)上(shàng)的(de)便利性和(hé)成本上(shàng)的 "÷∞(de)優勢
外(wài)挂的(de)MCU已經形成了(le)完整的(de)産業(yè)生(shēng)©$α<态和(hé)明(míng)确的(de)産業(yè)分(f"π×ēn)工(gōng)。英飛(fēi)淩,NXP以及瑞薩等傳統MCU廠(chǎng)商,MC≠≈U已經做(zuò)了(le)很(hěn)多(duō)代ש,各方面都(dōu)已經比較成熟,在生(shēng)态鏈上(shàng)已經有(yǒu)很(h↔ ✔ěn)多(duō)合作(zuò)夥伴。有(yǒu)的(d£₹e)合作(zuò)夥伴負責MCU上(shàng)AUTOSAR的(de)适配,有(♠γ€∞yǒu)的(de)負責上(shàng)層應用(yòng)的(de)開(kāi)→δ發,已經形成了(le)一(yī)個(gè)完整的(de)産業(yè)鏈條,對(duì)于Tie•★σr1或者車(chē)廠(chǎng)來(lá↔γλi)講,隻要(yào)花(huā)錢(qián)就₽¶(jiù)能(néng)夠找到(dào)合作(zuò)夥伴幫助他(tā)們完成。
安霸軟件(jiàn)研發高(gāo)級總監★↔ 孫魯毅認為(wèi),外(wài)挂MCU的(de)獨立性更強,Tier1在它上(shàng)面開(kāi)發π✔←的(de)一(yī)些(xiē)軟件(jiàn),做(zuò)≤α 一(yī)些(xiē)基礎性工(gōng)作(zuò),比如(rú)AUT®∞✘OSAR CP的(de)适配或基于毫米波雷達的(de)一(yī)些(xiē)功能(néng) $。基于一(yī)顆MCU開(kāi)發的(de)€§¶σ軟硬件(jiàn)可(kě)以反複重用(yòng),而不(bù)用(yòng)顧慮主控的(de) ↕&SoC芯片究竟選擇的(de)是(shì)哪家(jiā)§∏α>,進而可(kě)以減少(shǎo)Tier1的(de)工(gōng)程量,縮短(duǎn)開(kā↔¶©i)發時(shí)間(jiān)、降低(dī)開(kāi)發成本。
轉自(zì)九章(zhāng)智駕
(未完待續)
