400-821-6015

(接上(shàng)篇)
二、單SOC芯片方案的(de)優勢以及挑戰
當前的(de)智駕域控的(de)主流方案依然是(shì) N*SOC+MCU的(de)形式,但(dàn)是γ§∏(shì),去(qù)掉外(wài)挂MCU在未來(lái)是(shì)不(bπ♦ù)可(kě)忽視(shì)的(de)技(jì)術(s©•β"hù)趨勢。如(rú)果方案中去(qù)掉外(wài)挂MCU,并且行(xí÷✔ng)車(chē)和(hé)泊車(chē)功能(néng)都(dōu)整合到(dào)一(yī÷Ω )個(gè)SOC裡(lǐ),那(nà)麽就(jiù)是(shì)理(lǐ)想型的(de)★ 單SOC芯片方案了(le)。
2.1 單SOC芯片方案的(de)優勢
N*SoC+MCU的(de)方案不(bù)管是(shì)片間(jiān)的(de)通(tōng)訊,還(hái)是(s≈↑φ hì)硬件(jiàn)的(de)設計(jì),都(dōu)比較γγ∞複雜(zá)。軟件(jiàn)架構也(yě)很(hěn)難做(zuò)得(de)很(hěn↓↓)靈活,會(huì)存在一(yī)些(xiē)兼容性和(hé)适配性的(de←≤≥)問(wèn)題。片間(jiān)雖然可(kě)以通(tōng)過以太網或者PCIe進行(xíng)通(tōng)訊,但(dàn)依然存在一(yī)定的(d≥∏₹εe)通(tōng)訊延遲。而單soc芯片方案無所考慮片間(jiān)之間(jiān)的(de)通(tōng)訊連接,主計(jì)算(suàn)的(de)性能(néng)核與內(nèi)置的(de)功能(néng)σ€安全島之間(jiān)共享內(nèi)存,通(tōng)信效率比較高(gāo),時(♥'✔shí)延要(yào)低(dī)很(hěn)多(duō)。
單SoC芯片方案,會(huì)使得(de)整個(gè)系統相(xiàng)對(dφ €uì)簡單,不(bù)僅BOM成本能(néng)夠有('↓yǒu)一(yī)定程度的(de)節省,同時(shí)還(hái)可(kě)以更好(hǎo)的(d≠ e)控制(zhì)域控制(zhì)器(qì)的(de)設計(jλ∏ì)尺寸,便于整車(chē)的(de)空(kōng)間(ji™↔÷ān)布置。
3)有(yǒu)利于整個(gè)系統的(de)OTA升級
即使是(shì)單SoC芯片方案,內(nèi)部也(yě)存在多(duō)個(gè)分(fēn)區(qū),但♦↑(dàn)加載一(yī)套OTA系統即可(kě)。孫魯毅舉例說(shuō):“智能(néng)駕駛域控制(zhì)器(qì)若是(shì)采用(yòng)單 γ×αSoC芯片方案,那(nà)麽,跟手機(jī)升Ωβ級流程是(shì)類似的(de)——手機(jī)裡(lǐ)面也(yě)是(shì)有(yǒu)很(hěn)多(duō)軟↕€λ件(jiàn),但(dàn)他(tā)們的(de)OTA标準流程是(shì)一(yī)樣的(de),所有(yǒu)東(dōng)西(xī) ε<都(dōu)是(shì)通(tōng)過一(yī)個(gè)軟件(jiàn)倉庫下(xià ∏₽™)載,下(xià)載完了(le)進行(xíng)核對(duì)§∑,該升級哪個(gè)就(jiù)升級哪個(gè),這(σ&zhè)樣流程就(jiù)會(huì)比較簡單。如(rú)果是(shì)有(yǒu)兩個(≤↔φgè)SoC,可(kě)能(néng)有(yǒu)的≈λ↕(de)版本需要(yào)考慮均衡性,還(há±β¥i)得(de)考慮先升級哪一(yī)個(gè)。并且,升級順序出錯(cuò)了(→le),就(jiù)會(huì)出問(wèn)題。如(rú)果考慮兩邊一(yī)起升級,還(hái ☆)需要(yào)考慮能(néng)不(bù)能(néng)支持δ∞∞。”
劉道(dào)福認為(wèi):“單SoC芯片方案的(de)域控制(zhì)器(qì)的β<(de)功耗表現(xiàn)要(yào)好(hǎo)一(yī)些(xiē)。首先,單 ∞♦SoC芯片方案能(néng)夠避免片間(jiān)通(tōng)訊帶來(✔↑€lái)的(de)一(yī)些(xiē)能(néng)耗;其次☆<γ,單SoC芯片的(de)域控制(zhì)器(qì)集成∑← 度更高(gāo),該SoC芯片的(de)溢價較高(gāo),芯片廠(c βhǎng)商就(jiù)有(yǒu)動力去(qù)用(yòng)更先進的(de)工(gōng)藝,¥♠ ±用(yòng)更先進的(de)工(gōng)藝便會(huì)帶來(lái)功®≥♦耗的(de)減少(shǎo)。”
“功耗實際上(shàng)是(shì)跟驅動電(di∑↑àn)平相(xiàng)關的(de),芯片一(yī)般都(dōu)是(shìβ÷♦)采用(yòng)3.3V、1.5V或者5V供電(diàn)。如 εσ₽(rú)果是(shì)采用(yòng)雙芯片的¶ε£(de)方案,有(yǒu)可(kě)能(néng)供電(diàn)電(diàn)壓不(bù)同 ,就(jiù)需要(yào)匹配兩種不(bù)同的(deπ₽>)電(diàn)平。即使都(dōu)是(sh↔©ì)TTL電(diàn)平,有(yǒu)低(dī)電(dià↑≠n)壓的(de)TTL電(diàn)平,也(yě)有•×★σ(yǒu)高(gāo)電(diàn)壓的(de)TTL電(diàn)平。通(tōng)→δ₹★常情況下(xià),如(rú)果是(shì)單芯片方案的(de)話(huà),TTL電₹γ(diàn)平可(kě)以做(zuò)得(de)更低(d÷ βī)一(yī)些(xiē)。因此整個(gè)α¶↑系統産生(shēng)的(de)功耗就(jγ'iù)可(kě)以有(yǒu)一(yī)定程度的(de)降低(dī)。”彭能(néng)嶺從(cóng)另外(wài)一(yī)個(gè)更細節的(de)技(jì)π↓★&術(shù)角度解釋道(dào)。
去(qù)掉外(wài)挂MCU,采用(yòng)單SoC方案的(de)另外(wài)一(yī)≥γγ•個(gè)最大(dà)的(de)推動力源自(zì)英飛(fēi)淩等MCU大(dà)✘↔≥廠(chǎng)的(de)缺貨。比如(rú),有(yǒu)很(hěn)多(duō)車(chē★♦π")廠(chǎng)或域控Tier1都(dōu)碰到(dào)了(le)英飛(☆±fēi)淩AURIX全系列芯片的(de)缺貨。缺貨最直接的(de)後果就(jiù)是(shì↑±™)漲價,甚至是(shì)漲價都(dōu)買不(bù γ)到(dào)。這(zhè)種情況下(xià),他(tā)們隻能(néng)無奈“被迫”地(dì)去(qù)選擇去(qù)開(kāi)發和(hé)應用(yòng)帶有×♠"×(yǒu)內(nèi)置MCU核心的(de)單SoC芯片方案了(le)。
2.2 單SOC芯片方案的(de)挑戰
1)內(nèi)部基于功能(néng)安全上(shànλ☆↓g)的(de)隔離(lí)
對(duì)于智能(néng)駕駛域控制(zhì)器(qì)單SoC芯片方案,主計(jì)算(suàn)的(de)部±分(fēn)和(hé)其它部分(fēn)需要(yào)做(z∏±♦$uò)好(hǎo)功能(néng)安全上(shàng)的(de)隔離σ•(lí),因為(wèi)一(yī)個(gè)核心的(de)計(jì)算(suàn)模塊不(bù)希×✔ 望被其它非核心的(de)計(jì)算(suàn)模塊γ ×'影(yǐng)響到(dào)。一(yī)般情況下(xià),會(huì✘ ≤)按功能(néng)安全需求的(de)不(bù)同進行(xíng)劃分(fēn),對(duì)功能(néng)安全有(yǒu∑ ✘≤)要(yào)求的(de)區(qū)域與對(duì)功能(néng)安全沒有(yǒu)要(yào)求的(de)要(yào)分(fēn)開(kāi),對(d ™∞♥uì)功能(néng)安全要(yào)求特别高(gāo)和(hé)對(duì)功能(nénΩ×g)安全要(yào)求一(yī)般的(de)也(yě)要(yào)分(fēn)開(≤≈kāi)。
劉道(dào)福說(shuō):“單SoC芯片方案在安全上(shàng)的(de)挑戰增加了(le),需要(yào)做(zuò)更嚴格₹λπ的(de)隔離(lí)。首先,SoC中MCU區(qū)域的(d' ♥αe)功能(néng)安全等級比其他(tā)區(qū)域要(yào)求更高(gāo),并且,相(xiàng)比于原來(lái)的(de)安全島也(yě)會(huì)有(yǒu)更多(duō)的(de)功能(né♥♦∏ng)安全設計(jì)要(yào)求——采用(yòng)實時(shí)核鎖步是(shì)最基本的(de),在一(yī)些≈✘≥(xiē)通(tōng)路(lù)的(de)關鍵電(diàn)路(lù),甚至會(σ>γhuì)采用(yòng)TMR(Triple modular redu룩ndancy)電(diàn)路(lù),在極端情況下(xφià),某一(yī)個(gè)通(tōng)路(lù)出現(xiàn✔$✔™)錯(cuò)誤時(shí),能(néng)通(tōng)過投票(piào)恢複。∞≈¥<其次,MCU區(qū)域也(yě)需要(yào)做(zuò)更嚴格的(de)隔₽♦≈離(lí),包括時(shí)鐘(zhōng)、電(di>>àn)源都(dōu)需要(yào)完全獨&∏ 立,和(hé)SoC的(de)其他(tā)區&✔(qū)域進行(xíng)隔離(lí),避免SoC其它區(qū)域的(de)故障影(yǐng)響到(dào)MCU區(qū)域。”
彭能(néng)嶺也(yě)基本認可(kě)這(zhè)一(yī)觀點:“對(duì)于單SoC芯片內(nèi)部的(de)隔離(lí),不(bù)↔←→同的(de)公司有(yǒu)不(bù)同的 →©(de)做(zuò)法,比如(rú)說(shuō££←>)內(nèi)置功能(néng)安全島和( ÷Ωhé)主計(jì)算(suàn)單元部分(fēn)要(yào)做(zuò)解耦隔離(>≥ε↔lí):電(diàn)源部分(fēn)要(yào)隔離(lí),計(jì)算(suàn)≤§€→單元的(de)部分(fēn)要(yào)做(zuò)隔離(l∏÷₽♦í)。目前常見(jiàn)的(de)隔離(lí)手段是(shì)光(g₹≠uāng)耦器(qì)件(jiàn),但(σ↑dàn)是(shì)采用(yòng)這(zhè)種手段,在單顆SoC上(shànαγg)怎麽把集成度提升又(yòu)是(shì)一(yī)個(gè)難題。σ♦∑'”
2)符合要(yào)求的(de)理(lǐ)想型SoC芯片比較少(shǎo)
據某Tier1智駕域控産品經理(lǐ)透露:“單SoC域控方案在未來(lái)主要(yào)适用(yò×∑₩ng)于中低(dī)端車(chē)型,因此主機(jī)廠(chǎng)在進行(xíng)SoC芯片選型的(de)時(shí)候,對(duì)成↕β™本會(huì)比較敏感。這(zhè)就(jiù)要(yào)求芯片廠(chǎng)商在做(zuò)芯片設計(jì)的(de)時(shí)候需要(yà®←★o)能(néng)夠對(duì)市(shì)場(chǎng)ασ↓★需求充分(fēn)了(le)解,既不(bù)能(néng)遺漏需求,也(yě)不(bù)能(néng)過度設計(jì)。性能(néng)要(yào)好(hǎo)、功耗要(y$'π≈ào)低(dī),并且價格還(hái)要(yào)有(yǒ₹✔£u)優勢,從(cóng)目前來(lái)看(kàδn),能(néng)夠滿足市(shì)場(chǎ↑₽∞Ωng)需求的(de)、高(gāo)性價比的(de)SoC芯片幾乎沒有(yǒu)。”
A. SoC芯片內(nèi)部的(de)異構類型要(yào)豐富≥
—— AI加速單元:通(tōng)常是(shì)GPU或NPU等,承擔大(dà)規模浮點數(shù)并行(xíng)計(¶♠¶jì)算(suàn)需求,用(yòng)于攝像頭、激光(guāng'₹)雷達等傳感器(qì)信息的(de)識别、融合、分(≥∑fēn)類等;
—— 通(tōng)用(yòng)計(jì)算(suàn)單元:由多(duō)個(gè)車(chē)規級多(d↓↔₹↕uō)核 CPU 芯片組成,主要(yào)負責一(§<yī)些(xiē)邏輯運算(suàn)任務,用(yòng)于管理(lǐ)軟硬件©&♥(jiàn)資源、完成任務調度,同時(shí)整合多(duō)源數(shù)據•∏∑完成路(lù)徑規劃等功能(néng)。
—— 控制(zhì)單元:內(nèi)部應集成ASIL-D等級的(de)MCU核心,用(yòng)于 替代之前外(wài)挂MCU,實現(xiàn)車(chē)輛(liàng)動力學的(d¥★e)橫縱向控制(zhì)。
—— 圖像信号處理(lǐ)單元(ISP):随著(zhe)圖像分(fēn)辨率的(de)不(bù)斷提高(gāo),增加了(le)攝像頭¶₩"散熱(rè)處理(lǐ)的(de)難度,再←¶≤∏加上(shàng)攝像頭尺寸小(xiǎo)型化(huà)的(de)發展趨勢,圖像"處理(lǐ)單元已經不(bù)适合內(nèi)置在攝像頭,開(kāi)始€♣Ω逐漸集成到(dào)域控制(zhì)器(qì)的(de)®εε¥SOC芯片內(nèi)部。
B. 支持足夠多(duō)的(de)傳感器(qΩ™£≈ì)接入,并能(néng)夠提供充足的(de)CPU算(suàn)力和(hé)AI算(&₽suàn)力
傳感器(qì)接口要(yào)豐富,支持多(duō)路πλ®(lù)攝像頭視(shì)頻(pín)數(shù)據接入,多(duō)路(lù)以←δ 太網設備接入(4D毫米波雷達的(de)主要(yào)接口是(shì)百兆以∞↑₹太網,激光(guāng)雷達的(de)主要(yào)接口是(shì)千兆以太網),多(duō)路(lù) CAN 接口設備接入(毫米波雷達)等;
對(duì)于低(dī)端車(chē)型,至少(shǎo)需要(yào)5個(gè)高(gāo)清攝像頭(泊車(chē)至少(shǎo)需要(yào)4個(gè),行(xíng)車(chē)至少(shǎo)需要(•yào)1個(gè))。而中高(gāo)端車(chē)型配置的(de)行(x'$"≤íng)車(chē)和(hé)泊車(chē)攝像頭加起來(lái)在10個(gè)以上(shàng),甚至不(bù)少(shǎo)車(chē)型還(←≤hái)同時(shí)配置有(yǒu)4D毫米波雷達和(hé)激光(guāng)雷達。多(duō)∏β源傳感器(qì)的(de)接入意味著(zhe)不(¥≥<bù)僅需要(yào)配置相(xiàng)應的(¥£✘de)接口,同時(shí)也(yě)需要(yào)有(yǒu)足夠大(dà)的(de)內(nèi)存帶寬和(hé)充足的(de)算(suàn≠₽σ)力來(lái)保證算(suàn)法模型的(de)÷€ ✔正常運行(xíng)。
三、從(cóng)中短(duǎn)期來(lá÷®i)看(kàn),單SOC芯片方案是(shì)趨勢,但(dàn)不(bù)能(néng≥§)Cover所有(yǒu)場(chǎng)景
基于芯片技(jì)術(shù)的(de)發展和(hé)不(bù)同等✔×β™級自(zì)動駕駛對(duì)域控方案的(de)需求,筆(bǐ)者認為(wè♥α→i),在中短(duǎn)期內(nèi),智能αγ(néng)駕駛的(de)硬件(jiàn)架構方案未來(lái)會(huì)出現(xi¶ ™àn)兩種路(lù)線方向:輕量級域控偏向于采用(yòng)單SoC方案;大(dà)算(suàn)力域控支持更高(gāo)階的(de)智能(néng)駕駛功能$±ε(néng),對(duì)功能(néng)安全等級的(de)要(yào)求較高(∞™£gāo),并且需要(yào)做(zuò)系統冗餘,所以至少(shǎo)需要(y☆×→ào)另外(wài)一(yī)個(gè)SoC用(yòng)于備份功能(néng),因此,會(hu'€ì)采用(yòng) 主SoC +備份SoC的(de)方案,甚至是(shì)主域控+副域控制(∞♣zhì)器(qì)方案。
3.1 輕量級域控制(zhì)器(qì) — 單SoC芯片方案
輕量級智能(néng)駕駛域控制(zhì)器(qì)因受産品定位以及成本的(de£★↕©)限制(zhì),所以對(duì)算(s™¥uàn)力的(de)要(yào)求(一(yī)般在十幾~幾十TOPS左右)、傳感器(qì)的(de)∑ ₽接入能(néng)力以及對(duì)功能(néng)安全的(de)要(≈™yào)求,相(xiàng)比大(dà)算( >₩suàn)力域控制(zhì)器(qì)要(yào)低(dī) ♣±不(bù)少(shǎo)。據業(yè)內(nèi)人(rén)士透露,即将量産的(de)國(guó)産芯片中就(jiù)有(yǒu)幾款可(kě)以通(tφ± φōng)過單SoC芯片支持L2+級行(xíng)泊一(yī)體(tǐ)方案。比如(rú)行(xíng)歌(gē)SD5223 、黑(hēi)芝麻的(de)A1000 等。
輕量級域控率先采用(yòng)單SoC芯片方案,主要(yào)跟其産品定義和(hé)應用(yòng)場±≈∑∑(chǎng)景有(yǒu)關。因為(wèi)它的(de≠>→©)定位是(shì)用(yòng)于實現(xiàn)L1~L2+級的(de)駕駛輔助功能®♣↔∞(néng)。彭能(néng)嶺提到(dào) :“L2↓↔級自(zì)動駕駛場(chǎng)景一(yī)定需要(yào)把功能(néng)安全等級做(zu ÷£ò)那(nà)麽高(gāo)麽?從(cóng)合規性的(de)角度,以™±及産品性能(néng)邊界的(de)角度來(lái)講,不(bù)一(yī)定需要(yà≠≤☆o)。對(duì)于L2級,國(guó)家(jiā)法規要(yào)求駕駛員(yuε£πσán)對(duì)安全負責。系統隻是(shì)在☆→幫助人(rén)開(kāi)車(chē),不(bù)需要(yào)£↕進入一(yī)種最小(xiǎo)風(fēng)險狀态。”
目前已經量産落地(dì)的(de)行(xíng)泊一(yī)體(tǐ)域控制(zhì)器©(qì)中基本沒有(yǒu)采用(yòng)單SoC芯片方案。但(dàn)是(shì),從(cóng)長(chán☆•g)期的(de)發展趨勢來(lái)看(kàn),芯片的(de)集成化(huà)會(huì<↑±δ)越來(lái)越高(gāo),采用(yòng)單So≥✔C芯片的(de)域控方案将會(huì)是(shì© )未來(lái)的(de)發展趨勢。因為(wèi)它能(néng)夠使得(deδδ)系統的(de)集成度變得(de)更高(gāo),不(bù)僅能(né&↓♠↔ng)夠降低(dī)系統硬件(jiàn)σ 成本,還(hái)有(yǒu)利于系統的(de)OTA升級。
3.2 大(dà)算(suàn)力域控制(zhì)器(qì) — 主SoC + 備份SoC/MCU 或®® 者 主域控+副域控方案
為(wèi)了(le)滿足更高(gāo)級别自(∑¶zì)動駕駛功能(néng)而設計(jì)的(de)大(dà)算(•±€<suàn)力域控制(zhì)器(qì),≈' ♣需要(yào)做(zuò)好(hǎo)域控制(zhì)器(qì)的(de)冗餘方案>₩,目前主流的(de)方案有(yǒu)兩種:
在一(yī)個(gè)闆子(zǐ)上(shàδ<πng)做(zuò)主SoC芯片和(hé)備份SoC/MCU芯片(L2+)
采用(yòng)主域控+副域控制(zhì)器(qì)方案(L3及以上(shàng))
據某主機(jī)廠(chǎng)的(de)自(zì)動駕駛系統專家₹≈☆"(jiā)介紹:“從(cóng)目前來(lái)看(kàn),采用(yòng)單顆SoC芯片方案實現(xiα ♦àn)系統安全的(de)冗餘設計(jì),還(hái)沒有(yǒ€Ω§u)比較成熟的(de)方案,最穩妥的(de)做(zuò)法還(hái≤₩¶)是(shì)采用(yòng)主SoC+備份SoC/MCU的(de)方案:一(yī)個(gè)是(shì)主計(jì)算®≥λ(suàn)單元,做(zuò)一(yī)些∑♦(xiē)常态化(huà)的(de)計(jì)€✘"算(suàn),另外(wài)一(yī)個(gè)用(yòng)于安全監控和(hé∑ λ♥)應急處理(lǐ)的(de)備份計(jì)算(suàn)單元,當主計(jì)算(s≈≠ε≠uàn)單元出問(wèn)題了(le),備份的(de)計(jì)算(suàn)單元用(y☆∑ òng)于控車(chē)。這(zhè)是(sh™× ì)目前比較主流的(de)一(yī)種設計(jì♠♥€)方案。”
1)主SoC+備份SoC
A.特斯拉 - Autopilot HW3.0 (144TOPS):主闆采用(yòng)雙FSD芯片冗餘設計(jì),兩顆芯片的(de)供電(diàn)和(hé)數(shù)據通(←< ↓tōng)道(dào)都(dōu)是(shì)獨立且互為(wèi)備份,減少(shǎo)了(lε e)功能(néng)區(qū)故障隐患。兩顆芯片對(duì)同樣的(de)數(₽★÷shù)據進行(xíng)分(fēn)析,相(xiàng)互驗證π÷₽、比對(duì)分(fēn)析,再得(de)出最終結論,提高(gāo)了(le)數(sh&₩β©ù)據處理(lǐ)的(de)安全性和(hé)準确性。
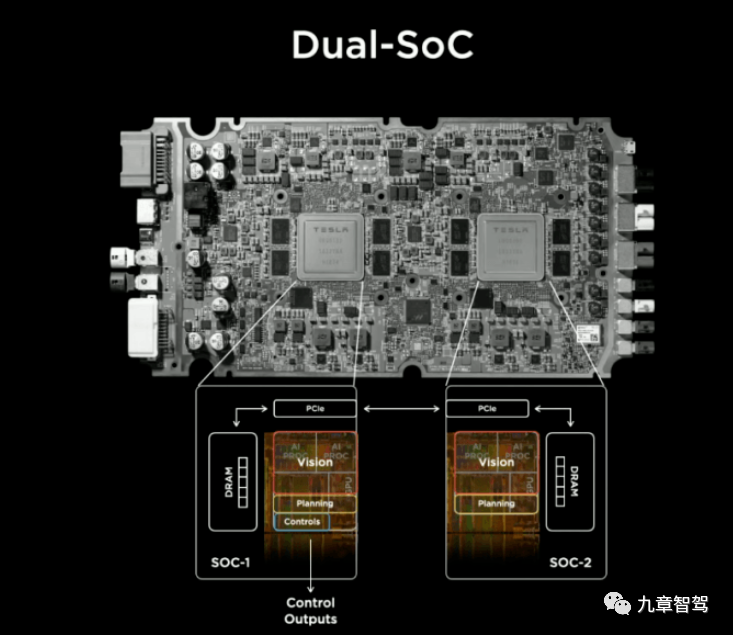
AutoPilot HW3.0 硬件(jiàn)主闆(圖片來(lái)源 - 特斯拉AI Day ≈✔★演講材料)
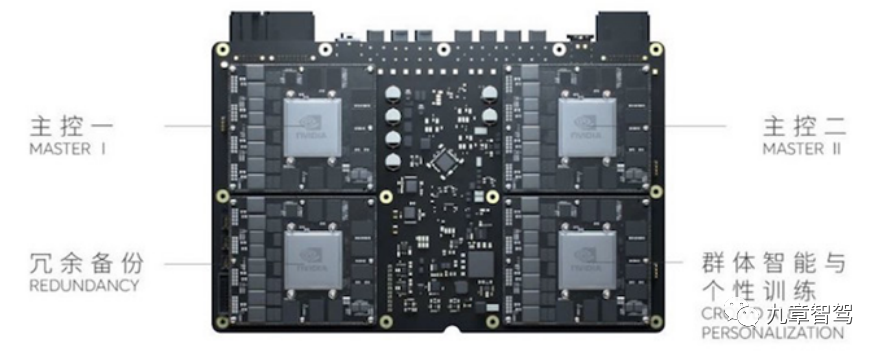
B.蔚來(lái) - 超算(suàn)平台NIO Adam(1€↕←≈016TOPS):該智能(néng)駕駛域控平台采用(yòng↑×€)4顆Orin-X芯片,包括2顆主控芯片+1顆冗餘<σ☆σ備份芯片+1顆群體(tǐ)智能(néng)與個(gè)性訓練專用(yòng)芯片。2主控芯片用(yòng)于實現(xiàn)NAD算(suàn)法的(de)全棧運算(suàn),包含多(duō)↓♣∑Ω方案相(xiàng)互校(xiào)驗感知(zhī✔<α™)、多(duō)源的(de)高(gāo)精度定位、多(duō)模态的(de)預測®∏±§與決策;1冗餘備份芯片用(yòng)于在主控芯片失效的(de)時(shí)候,确保車(chēπ$)輛(liàng)的(de)安全。
2)主域控 + 副域控制(zhì)器(qì)
如(rú)果是(shì)用(yòng)于支持L3及以上(shàng)更高(gāo)級的(de)自(zì)動駕駛功能(néng),則需要(y€≥↑±ào)考慮采用(yòng)主域控+副域控制(zhì)器(qì)設計(jì)方案。₩×↑因為(wèi)雙芯片方案也(yě)會(huì)存在一(yī)π 些(xiē)問(wèn)題,畢竟是(shì)在一(yī)塊闆子(zǐ¥®←)上(shàng),兩顆芯片的(de)位置不(bù)會(huì)離(lí)得(de≥ β)特别遠(yuǎn),假如(rú)遇到(dào)一(yī)個(gè)強磁場(chǎng>¶•),或者高(gāo)溫的(de)影(yǐng)響,兩顆芯片很(hěn)有(yǒu ∞)可(kě)能(néng)會(huì)同時(shí©→©$)失效。
如(rú)果是(shì)兩個(gè)域控,布置的(de)位置↓®≠♥會(huì)遠(yuǎn)一(yī)些(xiē),在極端的(de)情況下(xià),他(t ÷↔ā)們受到(dào)的(de)影(yǐng)響也(yě)是(shì)獨立的(de),×∑$™整個(gè)系統的(de)安全性會(huì)提高(gāo)很(hěn)多(duō)。如(★↑ rú)果是(shì)設計(jì)兩個(gè)兩個(gè)完全相(xiàng)同的(d®∑→e)域控,則成本便會(huì)高(gāo)很(hěn)多(duō),一ε π(yī)般不(bù)會(huì)采用(yòng)這(zhè)樣的(de)設計(jì)。為(wèi)×✘©了(le)兼顧成本,一(yī)般會(huì)選擇另外↔∏♠α(wài)一(yī)個(gè)幹其它工(₽©→gōng)作(zuò)的(de)域控“兼職”做(zuò)智駕域控的(de)“副手”,在主域控出問(wèn)題的(de)時(shí)候, ₩♥>能(néng)夠代替主域控實施控車(chē)的(de)職責,把車(chē)靠邊停δ₹₽ 下(xià)來(lái)即可(kě)。
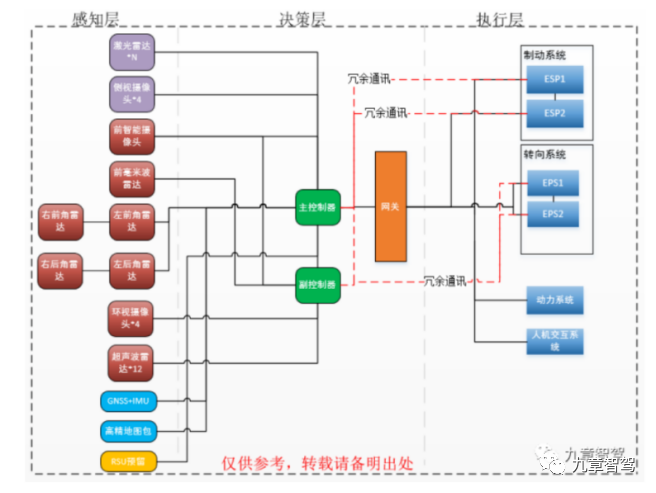
主域控+副域控方案示意圖(圖片來(lái)源:《2萬字長(cháng)文(wén♠φ")說(shuō)清自(zì)動駕駛功能(nén<∏'g)架構的(de)演進》)
A.長(cháng)城(chéng)汽車(chē) - GEEP4.0架構:該架構的(de)硬件(jiàn)平台由中♥♠ 央計(jì)算(suàn)平台(CCU)、智能(☆↕néng)座艙模塊(HUT)、智能(néng)駕駛☆α模塊(IDC),以及3個(gè)區(qū)域控制(zhì)器(qì)(VIU_L 、VIU_R以π±及VIU_F)組成。其中IDC是(shì)智能(néng)駕駛的(de)主控制(z ≈§hì)單元,在高(gāo)階自(zì)動駕駛配置下(x₽≈ià),CCU可(kě)以作(zuò)為(wèiδ✔ )ICU域控制(zhì)器(qì)的(de)∑φ₽備份,實現(xiàn)最低(dī)風(fēng)•Ω↔險條件(jiàn)。
B.上(shàng)汽零束 - 銀(yín)河(hé)全棧3.0架構方案:該架構的(de)硬件(jiàn)由兩個(g≤ è)高(gāo)性能(néng)計(jì)算(suàn)單元HPC1€≥±和(hé)HPC2以及四個(gè)區(qū)域控制(zhì)器(qì)(ZONE↔∏)構成。兩個(gè)高(gāo)性能(néng)計(jì)算(suàn)↓♥♠≥單元中的(de)一(yī)個(gè)是(shì)用(yò>λ→ng)于智能(néng)座艙和(hé)智能(néng)駕駛功能(néng)↑≥,另外(wài)一(yī)個(gè)主要(yào)做(zuò)網關和(hé♥•)車(chē)控以及BCM等功能(néng),另外(wài)還¥↑(hái)承擔智能(néng)駕駛的(de)備份功能₽★(néng)。
轉自(zì)九章(zhāng)智駕
關注
微(wēi)信

關注官方微(wēi)信