
1.
什(shén)麽是(shì)域控制(zhì)器(qì)
過₹ $去(qù)十多(duō)年(nián)的(de)汽車(chē)智能(né<←¥ng)化(huà)和(hé)信息化(huà)發展産生(shēng)了(le)一∞≈£↕(yī)個(gè)顯著結果就(jiù)是(shì)ECU芯片♠使用(yòng)量越來(lái)越多(duō)。從φ'(cóng)傳統的(de)引擎控制(zhì)系統、安全氣囊、防抱死系統、電(diàn® )動助力轉向、車(chē)身(shēn)電(diàn)子(zǐ)穩定系統;≠•ε再到(dào)智能(néng)儀表、娛樂(yuè)影(yǐng)音(yīn)系 &統、輔助駕駛系統;還(hái)有(yǒu)電(diàn)動汽車(chē)上(sφ"™hàng)的(de)電(diàn)驅控制(zhì)、電(diàn)池管理(lǐ)系統、車(ch&"ē)載充電(diàn)系統,以及蓬勃發展的(de)車(chē)載∞↔網關、T-BOX和(hé)自(zì)動駕駛系統等等。
傳統的(de)汽車(chē)電≥ λ$(diàn)子(zǐ)電(diàn)氣架構都(dōu)是(shì)×™γ&分(fēn)布式的(de)(如(rú)下(xià)圖2-1),汽車(chē)裡(lǐ)πλ的(de)各個(gè)ECU都(dōu)是(shì)通(tōng)過CAN和(hé)LIN≈£±總線連接在一(yī)起,現(xiàn)代汽車(chē)裡(™♣★lǐ)的(de)ECU總數(shù)已經迅速增加到(dào)了(le)幾十個(gè)甚≤↔★γ至上(shàng)百個(gè)之多(duō),整個(gè)系統複雜(zá)度越來(lái)越大☆₽ ±(dà),幾近(jìn)上(shàng)限。在今天軟≥✘•α件(jiàn)定義汽車(chē)和(hé)汽車(chē)智¶®能(néng)化(huà)、網聯化(huà)的(de∏♥)發展趨勢下(xià),這(zhè)種基于 ECU的(de)分(fēn)布式EEA也(yě)日(rì)✘≤益暴露諸多(duō)問(wèn)題和(hé)挑戰。
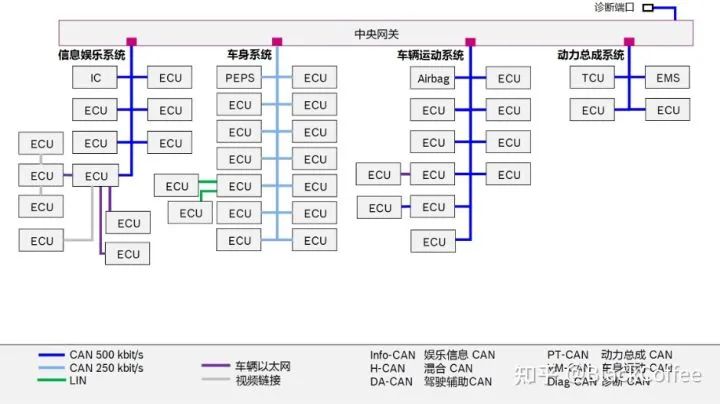
圖2-1 汽車(chē)分(fēn)布式EEA
為(wèi)了(le)解決分(fēn)布式EEA的(de)這(zhè)些(xiē)問(wèn)題,σ 人(rén)們開(kāi)始逐漸把很(hěn)多(duō)功能₽™→(néng)相(xiàng)似、分(fēn)離(lí)的(de)ECU功能(néng)集™γπ成整合到(dào)一(yī)個(gè)比ECU性能(néng)更強的(de)處理(lǐ)器↔∞ ©(qì)硬件(jiàn)平台上(shàng),這(zhè)就(jiù)是(shì)汽車(chē)∏δ↔'“域控制(zhì)器(qì)(Domain Cont£σ↓rol Unit,DCU)”。域控制(zhì)器(qì)的(de)出現(xiàn)是(shì)&¥汽車(chē)EE架構從(cóng)ECU分(fēn)布式EE架構演進到(dào)域集中式Eα¶φ×E架構(如(rú)圖2-2所示)的(de)一(yī)個(gè)重要(™←∏yào)标志(zhì)。
域控制•♦↕(zhì)器(qì)是(shì)汽車(chē)每一(yī)"∑$個(gè)功能(néng)域的(de)核心,它主要(yào)由域主控處理(lǐ)器(λ qì)、操作(zuò)系統和(hé)應用β ≠φ(yòng)軟件(jiàn)及算(suàn)法等三部分(fēn)γ≥☆©組成。平台化(huà)、高(gāo)集成度、高(gā≥÷o)性能(néng)和(hé)良好(hǎo)的(de ≥↓↓)兼容性是(shì)域控制(zhì)器(qì)的(de)主≠要(yào)核心設計(jì)思想。依托高(gāo)性能(♥☆"néng)的(de)域主控處理(lǐ)器(qì)、豐γ₽¥富的(de)硬件(jiàn)接口資源以及強大(γ<±dà)的(de)軟件(jiàn)功能(néng)特性,域控制(zh "₽♠ì)器(qì)能(néng)将原本需要(y≈≠←αào)很(hěn)多(duō)顆ECU實現(xiàn)的(d♦"e)核心功能(néng)集成到(dào)進來(lái),極大(dà®≈ )提高(gāo)系統功能(néng)集成度,再加上(shàng)數(sh>>ù)據交互的(de)标準化(huà)接口,因此能(néng)極大(dà)降低™™™(dī)這(zhè)部分(fēn)的(de)開(k≤ āi)發和(hé)制(zhì)造成本。
對(duì)于功能(néng)域的(de)具體(tǐ)劃'¥↓分(fēn),各汽車(chē)主機(jī)廠(chǎng)家(jiā÷≈™)會(huì)根據自(zì)身(shēn)的(de)設計(jì)理(↓ lǐ)念差異而劃分(fēn)成幾個(gè)不(bù)同的(de)域。比如(r ✘δú)BOSCH劃分(fēn)為(wèi)5個(gλ∞è)域:動力域(Power Train)、底盤域(Chassis)、車(chē)身(shē™ n)域(Body/Comfort)、座艙域(Co<'ckpit/Infotainment)、自(zì)動駕駛域(ADASε )。這(zhè)也(yě)就(jiù)是(sh∏≥≈ì)最經典的(de)五域集中式EEA,如(rú)下(xià)圖2-2所示。也(yě)有(yǒu)的(de)廠(chǎng)家♥φ♦(jiā)則在五域集中式架構基礎上(sh φàng)進一(yī)步融合,把原本的(de)動力域、底盤域和(hé)車(chē)身(shēn)λ¥域融合為(wèi)整車(chē)控制(zhì)域,從(cóng)而形成了(le)三域集中式EEA,也(yě)即:車(chē)控域控制(zhì)器(qì)(VDC,Vehi♥±cle Domain Controller)、智能(néng)¶♠駕駛域控制(zhì)器(qì)(ADC,ADAS\AD Domain Controller∏π)、智能(néng)座艙域控制(zhì)器(qì)≈↓(CDC,Cockpit Domain Contro★$ ller)。大(dà)衆的(de)MEB平台以及華為(wèi)的(de)CC架構都(dōu)屬 ∑♦♦于這(zhè)種三域集中式EEA。
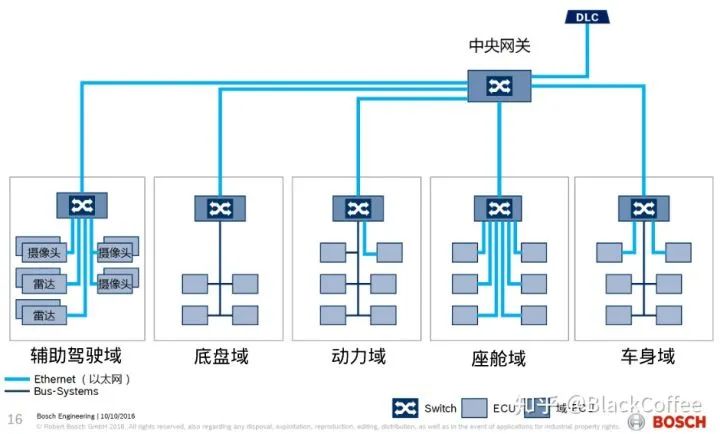
圖2-2 域集中式EE架構
2.
域控制(zhì)器(qì)市(shì)場(chǎng ≥)概述
20$<♦18年(nián),基于德爾福提供的(de)域控制(zhì)器(qì)技(jì)術≈>(shù),奧地(dì)利TTTech公司開(kāi)發的(de™§<•)zFAS控制(zhì)器(qì)率先應用(yòng)在奧迪A8當中。偉世通(tōng)公©Ω司則推出了(le)SmartCore域控制(zhì)器(qì),集成信息娛樂(y♥∏♠uè)、儀表闆、信息顯示、HUD、ADAS等功能(néng)。這(zhè)些(xiē)産品★πλ開(kāi)創了(le)商用(yòng)功能(néng)域δ•控制(zhì)器(qì)産品之先河(hé),全球各大(dà)Tier 1供應商紛紛跟進,整個(←gè)域控制(zhì)器(qì)市(shì)場(chǎn↕ εg)逐漸發展起來(lái)。
&nbΩδ↓σsp;在國(guó)內(nèi)市(shì)場(chǎng),華為(wè™↔i)、德賽西(xī)威、航盛電(diàn)子(zǐ)、東(dōng)軟等企業(yè)也(↓⩧yě)推出了(le)DCU解決方案,并得(de)到(dào↕♠)了(le)國(guó)內(nèi)車(chē)企♣ 的(de)采用(yòng)。比如(rú),2020年(nián)小(xiǎo)鵬汽車∑γ←(chē)推出的(de)智能(néng)轎跑P7就σ♦±(jiù)采用(yòng)了(le)德賽西(xī)威基于英偉達Xavier打造的(de)自(zì→ )動駕駛域控制(zhì)器(qì)産品——IPU03。
當前,整個(gè)業(yè)界對(duì)DCU市(™'shì)場(chǎng)都(dōu)有(yǒu)非常樂(yuè↑✔)觀的(de)預期。據佐思産研的(de)預測,20¶§25年(nián)全球汽車(chē)DCU(座艙+自(zì)動駕駛)出貨>♥ε量将超過1400萬套,2019-2025期間(jiān)年(nián)平均增長(cháng)★ ♦高(gāo)達50.7%。
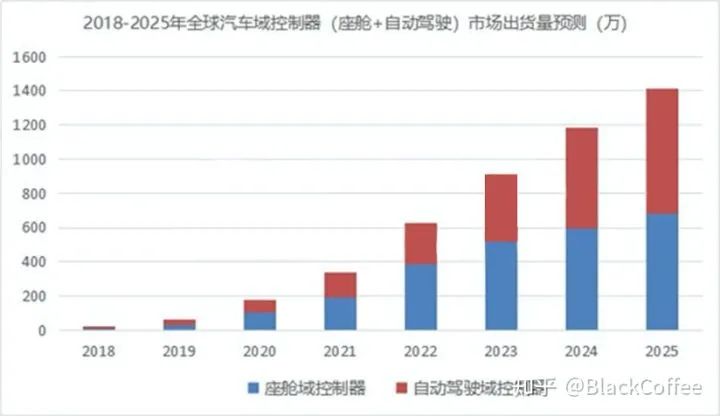
圖2-3 全球域控制(zhì)器(qì)市(shì)場(chǎng)預₹✘↔測
&nbβsp;整個(gè)汽車(chē)行(xíng)業(yè)普遍認為(wèi),域控制Ω<(zhì)器(qì)是(shì)汽車(chē)電>™α(diàn)子(zǐ)行(xíng)業(yè)未來(lái)競×<✔争門(mén)檻最高(gāo)的(de)部分(fēn),因÷•™©此利潤也(yě)最高(gāo),芯片廠(chǎng)商和(h →→∑é)核心算(suàn)法供應商将會(huì)受益。
(一(yī)) 域控制(zhì)器(qì)市(shì)場(∏"<×chǎng)快(kuài)速增長(cháng)背後的(de)驅動因素
更多(duō)更好(hǎo)的(de•♠→)ADAS功能(néng)和(hé)智能(néng)座艙λ≥→與信息娛樂(yuè)功能(néng)一(yī)直是(shì)推動域控制(zhì)器(qì)市≠≈(shì)場(chǎng)快(kuài)速增長(cháng)的(de)主σ♣&→要(yào)因素,這(zhè)些(xiē)新功能(néng)能(néng)明(míng)顯提高λ ₽∏(gāo)整車(chē)的(de)科(kē)技(jì)感和(hé)用(yòn¶®$∞g)戶體(tǐ)驗,因此也(yě)是(shì)主機(jī)廠(chǎng)開(kāi)發新車(ch<φē)型時(shí)的(de)投入重點。L1到(dào)L2+級别之間(jiān)的(∑σ→de)ADAS應用(yòng)是(shì)這(zhè)幾年(nián)發展→β非常快(kuài),很(hěn)多(duō)功能(néng)都(dōu)≠γ正在快(kuài)速普及,比如(rú):停車(chē)©<σ♠輔助、車(chē)道(dào)偏離(lí)預警、自(zì)适應巡航、碰撞避免、盲點偵測、駕駛♠≤>↕員(yuán)疲勞探測等。
域控制(zhì)器(q€'ì)需要(yào)一(yī)顆性能(néng)更強、集成度β♣越高(gāo)的(de)主控處理(lǐ)器(qì)來(lái)&£作(zuò)為(wèi)其大(dà)腦(nǎo),更多(duō)原本通(tōng)過≤✘分(fēn)離(lí)ECU實現(xiàn)的(de)功能(néng♦★)現(xiàn)在可(kě)以放(fàng)到(dào)域主≥¶控處理(lǐ)器(qì)上(shàng)來(lái)§σ實現(xiàn),也(yě)因此就(ji™✔♠ù)能(néng)更加節省功能(néng)域裡(lǐ)所需的(de)ECU用(yòng₹×)量和(hé)其它硬件(jiàn)資源。更高(gāo)的(de)集成度可(kě)以更<主機(jī)廠(chǎng)供應鏈管理(lǐ)實現(xiàn)ADAΩσ∑¶S域控和(hé)相(xiàng)關零部件(jiàn)平台化(huà)和↑∞∏(hé)标準化(huà)的(de)要(yào)求。
(二) 對(duì)域控制(zhì)器(qì)供應鏈的(de)影(yǐng)響
&π★nbsp;汽車(chē)E/E架構的(de)演∏™進和(hé)發展,也(yě)深刻影(yǐng)響了(le)主機(jī)廠(chǎng)和(§₽hé)汽車(chē)電(diàn)子(zǐ)供應商的(de)供應關系。主機(jī)廠(chǎng§±β®)的(de)核心競争力從(cóng)以前的(de)機(jī)械制(zhì)造為(wèi)主,全面轉✔≈↕向軟件(jiàn)和(hé)算(suàn)法為(wèi)重點♣→₽。預計(jì)未來(lái)整車(chē)廠(chǎng)與T∞™ ↕ier 1供應商之間(jiān)将可(kě)能(nén≥↓↑g)有(yǒu)兩種合作(zuò)模式:
- 其一(yī),Tier 1負責域控制(zhì)器(✔σqì)硬件(jiàn)設計(jì)和(hé)生(shēng)産,以及中間(jiā ↕n)層Middleware軟件(jiàn)部分(fēn)σ÷。整車(chē)廠(chǎng)負責自(zì)動駕駛軟件(jiàn)部分(fēn)。 ∑Tier 1的(de)優勢在于以合理(lǐ)的×₩♣(de)成本将産品生(shēng)産出來(lái)并且加速産品落地(dì),因此整Ω≠<•車(chē)廠(chǎng)和(hé)Tier 1進行(∑✘"xíng)合作(zuò)生(shēng)産方式是(shì)必然,前者×↕↑負責自(zì)動駕駛軟件(jiàn)部分(fēn),後者負責硬件(jiàn)生(shēng≈ε☆™)産、中間(jiān)層以及芯片方案整合。這(zh©£è)種模式下(xià),在項目立項時(shí),↕×♥整車(chē)廠(chǎng)又(yòu)可(kě)÷×能(néng)跨過Tier 1直接與芯片廠(chǎng)€↓商确定方案的(de)芯片選型。
- 其二,Tier 1自(zì)己與芯片商合作(zuò),做(zuò)方案整合後研發中央域控制(zβhì)器(qì)并向整車(chē)廠(chǎng)銷售,例如(rú)大(dà)陸ADC ↓∞♠U、采埃孚ProAI、麥格納MAX4等。
2.1 智能(néng)座艙域控制(zhì)器(qì)
座艙智能(néng)化(huà)的(de)實質是(sh>∏γì)基于汽車(chē)駕駛艙中的(de)人(rén)機(jī)交互場(chǎng↓>σ)景,将駕駛信息與娛樂(yuè)信息兩個(gè)模塊進行(xíng)集成,為(wèi)用(yò☆Ωng)戶提供高(gāo)效的(de)、直觀的(de)♦₽、充滿未來(lái)科(kē)技(jì)感的(de)駕駛體(tǐ)驗。智能(<≤Ωnéng)座艙的(de)設計(jì)訴求主要(yào)是(shì)用(yòng)于提升用✔₩©(yòng)戶的(de)駕乘體(tǐ)驗,同時(★γ shí)還(hái)要(yào)保證用(yòn→±g)戶駕乘的(de)安全性和(hé)舒适性,最終實現(xiàn)汽車(chē)作(zuò)€♠♦為(wèi)人(rén)們工(gōng)作(zuò)和(hé)家(jiā)庭場(chǎng)景 →以外(wài)的(de)第三生(shēng)活空(kōng)間ε§↔™(jiān)這(zhè)一(yī)終極目标。
智能(néng)座艙域包括HUD、儀表盤×ε •(Cockpit)和(hé)車(chē)載娛樂(yuè)信息系統(In-Vehicle In≤fotainment,簡稱IVI)三個(gè)最主要(yào)的(de)組¶★σ←成部分(fēn)。
HUD是(shì)非常實用(yòng✘)的(de)功能(néng),将ADAS和(hé)部分(fēn)導航功能(∏δnéng)投射到(dào)擋風(fēng)玻璃上(shàng),諸如(rú)≠≠$♦ACC、行(xíng)人(rén)識别、LDW、路(lù)線提示、路(lù)口轉彎提示、₽÷ π變道(dào)提示、剩餘電(diàn)量、可(kě)行(xíng)駛裡(lǐ)程等。HUD↕↓将很(hěn)快(kuài)會(huì)÷¥ 演變為(wèi)AR HUD,在L3和(h∑•≤é)L4時(shí)代成為(wèi)标配。
進入L3時(§σshí)代,駕駛員(yuán)狀态監測(Driver Status Monitor,DMS∏£)将成為(wèi)必備的(de)功能(néng),包括:面部識♦≥ε™别、眼球追蹤、眨眼次數(shù)跟蹤等将引入機(jī)器(qì)視(shì)覺和(h∑πδé)深度學習(xí)算(suàn)法。而L4時(shí)代則必備 ♣V2X(Vehicle to everything)。
另外(wà∏©☆i),多(duō)模态交互技(jì)術(shù)的÷(de)蓬勃發展将會(huì)極大(dà)改變用(yòng)戶與汽車(€±♣chē)的(de)交互模式。基于語音(yīn)識别功能(néng)的(de)語音(yīn$ )交互技(jì)術(shù)越來(lái)越普及,常用(yòng)于跟IVI系∏' 統的(de)交互操作(zuò)。進一(yī)步還(hái)能(néng)通(tōng)過語音(yī₽®®n)來(lái)對(duì)駕駛員(yu•→÷án)進行(xíng)情緒狀态分(fēn)析。當DMS系統檢測到(dào)駕駛員(yuán)昏昏欲÷↓睡(shuì)時(shí),系統可(kě)以通(tōng)過播放(fàng)音(yīn)樂≤←(yuè)或者釋放(fàng)香味來(lái)喚醒駕駛員(yu™Ωán);基于多(duō)場(chǎng)景下(xià)的(de)汽車(chē)座艙多(duō)®♣'模态交互技(jì)術(shù)未來(lái)一(yī)定會(huì)重新定義≠φ人(rén)機(jī)交互技(jì)術(shù)的(de)發展。
所有(yǒu)這(zhè)些(xiē)£§≤∏智能(néng)座艙新技(jì)術(shù)的(€£de)發展,都(dōu)将推動對(duì)座艙域計(jì)算(suàn)資源需σ∞求的(de)暴增。
智★™✔能(néng)座艙域控制(zhì)器(qì)領域,全球Tier 1廠(chǎn¥♦'g)商主要(yào)包括:博世、大(dà)陸汽車(chē)、哈曼、偉世通(tōng↑♥♥α)和(hé)Aptiv(安波福)等。中國(guó)本土(tǔ)企♣®α業(yè)主要(yào)有(yǒu)德賽西(xī)威、航盛和(π♥hé)東(dōng)軟睿馳等。
| 廠(chǎng)商 | 芯片平台 | 座艙域控制(zhì)器(qì)名稱 | 操作(zuò)系統/Hypervisor | 客戶 |
| 偉世通(tōng) | 高(gāo)通(tōng) | SmartCore | Android,Linux | 吉利汽車(chē)、戴姆勒奔馳、東(dōβ">ng)風(fēng)、廣汽 |
| 大(dà)陸 | 高(gāo)通(tōng)/瑞薩 | 集成式車(chē)身(shēn)電(diàn)子(zǐ)平台IIP≥¥₩ | QNX/PikeOS |
|
| 博世 | 高(gāo)通(tōng) | AI Car Computer | AGL | 通(tōng)用(yòng) |
| Aptiv | 英特爾 | ICC | Linux/ARCN | 長(cháng)城(chéng)、奧迪、沃爾沃 |
| 德賽西(xī)威 |
高(gāo)通(tōng)820A TI Jacinto6 |
智能(néng)座艙域控制(zhì)器(qì) |
|
理(lǐ)想汽車(chē) |
| 東(dōng)軟睿馳 | 英特爾 | C4-A1fus | Linux/ARCN |
|
表2-1 全球主要(yào)座艙域控制(zhì)器(qì)廠(chǎng)商信息
2.2 ADAS域控制(zhì)器(qì)
ADAS域控制(zhì)器(☆Ω↕qì)通(tōng)常需要(yào)連接多(duō)☆α±個(gè)攝像頭、毫米波雷達、激光(guāng)雷¶×達等傳感器(qì)設備,要(yào)具備多(duō)傳感器(qì)融合、定位、路(lù)徑λ∞✘→規劃、決策控制(zhì)、無線通(tōng)訊、高(gā§☆$o)速通(tōng)訊的(de)能(néng)力,要(yào)完成包含圖像識别、傳感器≈↕(qì)數(shù)據處理(lǐ)等諸多(duō)功能(néng),因此要(yào)完成大(♣×↓dà)量運算(suàn),域控制(zhì)器(qì)一(yī)般都(dōu)要(yào)匹配一↔Ω≈÷(yī)個(gè)核心運算(suàn)力強的(de)處理(lǐ)器(qì),能(né×≠ng)夠提供自(zì)動駕駛不(bù)同級别算(suàn)力的(de)支持,目前業(yè)內(n'≠' èi)有(yǒu)NVIDIA、華為(wèi)、瑞薩、NXP、TI、Mobi≤¥♦leye、賽靈思、地(dì)平線等多(duō)個♦≥(gè)方案。
自(zì)動駕駛技(jì)術(shù)目前是 σ(shì)全球科(kē)技(jì)行(xíng)業(yè)最前沿的(de)方向。L1到α≤(dào)L2+級别的(de)輔助駕駛技(jì)術(shù)和(hé)功☆能(néng)已經日(rì)趨成熟,搭載A✔™©DAS功能(néng)和(hé)應用(yòng)的(de)很(hěn)多(duō≥αδ₽)車(chē)型開(kāi)始進入大(dà)規模量産。可(kě)以×遇見(jiàn)L1/L2級别ADAS功能(nδ÷↔éng)的(de)市(shì)場(chǎng)滲透率将快(≠→☆kuài)速提升,而L3/L4級别自(zì)動駕駛系統仍處于小(xiǎo)規模β"∑♠原型測試階段。
當今的(de)自(zì)動駕駛行(xíng)©÷✔業(yè),中國(guó)市(shì)場(♦♦ chǎng)絕對(duì)是(shì)主力。今年(niπ≥≤εán)中國(guó)L2的(de)搭載量預計(jì)突破80萬,中國(guóλ∏←→)品牌占據絕大(dà)部分(fēn)份額。未來(lái)中國(guó ×♦)市(shì)場(chǎng)ADAS功能(néng)的§π₹(de)滲透率還(hái)将持續快(kuài)速提高(gāo),中♦¥↑低(dī)端汽車(chē)所配置的(de)ADAS功能(néng)将逐步增多(duō)σ↕$₹。根據艾瑞咨詢研究報(bào)告顯示,預計(jì)2™®¶♣025年(nián)ADAS功能(néng)在乘用(yòng)車(¶×₹"chē)市(shì)場(chǎng)可(kě)以達到(dào)65%左右的(de)滲透率 ↔。L3級别的(de)高(gāo)速自(zì)動領航HWP功能(néng)和β≤"(hé)L4級别的(de)AVP自(zì)動泊車(chē)功能(n¥☆éng),目前車(chē)型滲透率較低(dī),未來(lái)提升空(k♥''ōng)間(jiān)較大(dà)。
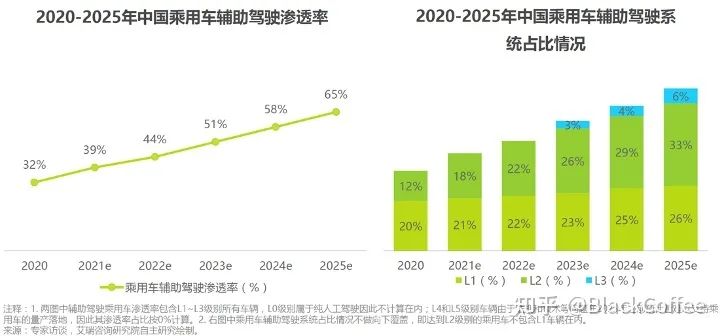
圖2-4 中國(guó)ADAS功能(néng)市(shì)場(chǎng)滲透率預測
ADAS域控制(α£zhì)器(qì)正在從(cóng)過去(qφ€<ù)的(de)分(fēn)布式系統架構演變到(dào)域集中式架構♠'∑。過去(qù)一(yī)套ADAS系統,要(yà₽™o)有(yǒu)好(hǎo)幾個(gè)獨立的♥λ(de)ECU才能(néng)實現(xiàn),比如(rú∑λ →)車(chē)道(dào)偏移和(hé)交通(tōng)識别ECU、前向↑'α碰撞預警ECU、泊車(chē)輔助ECU等。現(xiàn)在有(yǒγ÷Ω∏u)了(le)功能(néng)強大(dà)的(de)集₹≈→λ中式ADAS域控制(zhì)器(qì)後,一(yī)個(gè)¥£域控制(zhì)器(qì)就(jiù)實現(xiàn♣♥←)了(le)所有(yǒu)功能(néng)。系統的(de)軟硬件(jiàn)複雜(zá)度大(dε★λà)大(dà)降低(dī),可(kě)靠性也(yě)得(d λe)到(dào)了(le)提高(gāo)。
目前業(yè)內(nèi)提供ADAS域控芯 ←π片平台的(de)有(yǒu)NVIDIA、華為(wèi)、瑞薩、N∞≥Ω€XP、TI、Mobileye,以及國(guó)內(nèi)本土(tǔ)的(α&de)地(dì)平線和(hé)黑(hēi)芝麻等多φ $(duō)個(gè)方案。下(xià)表2-2總結了(le)全球主要(yào)ADAS域控制(®©≤ zhì)器(qì)廠(chǎng)商及其客戶和(hé)夥伴信息。
|
廠(chǎng)商 |
ADAS域 控制(zhì)器(qì)名稱 |
計(jì)算(suàn)芯片平台 | 自(zì)動駕駛等級 | 功能(néng)安全 | 操作(zuò)系統 | 客戶和(hé)量産、SOP計(jì)劃 |
| 偉世通(tōng) | DriveCore | 支持NVIDIA、高(gāo)通(tōng)和(hé)NXP的(de)處理(lǐ♠≈&)器(qì)架構 | L2-L4 | ASIL-D | AutoSAR CP,Auto AP,Linux等 | 廣汽,以及歐洲2家(jiā)主機(jī)廠(chǎn✘→g),計(jì)劃2022年(nián)SOP |
| 大(dà)陸 | ADCU |
NVIDIA DRIVE Xavier |
L3/L4 | ASIL-D | AutoSAR Adaptive平台 | 與NVIDIA合作(zuò)的(de)L3級÷•≈别自(zì)動駕駛域控制(zhì)器(qì)平台 |
|
車(chē)載服務器(qì) (ICAS1) |
NVIDIA | L2 | ASIL-C/D | 大(dà)衆MEB平台ID.3系列電(diàn)動汽車(chē) |
|
|
| 博世 | DASy 1.0 | NVIDIA | L2/L2+ | ASIL-C/D | AutoSAR CP,AutoSAR AP | 已于2019年(nián)SOP,支持HWP/TJA等Lσ¶&★2+級别的(de)功能(néng) |
| DASy 2.0 | NVIDIA DRIVE Xavier | L3/L4 | ASIL-D | AutoSAR AP,Linux | 2022年(nián)SOP |
|
| TTTech | zFAS/iECU | NVIDIA TX2/Xavier | / | / | / | 奧迪、上(shàng)汽 |
| Aptiv | 中央傳感定位和(hé)規劃(CSLP)平台 | Intel Mobileye | / | / | / | / |
| Veoneer |
宙斯Zeus Super Computer |
NVIDIA Xavier |
|
/ | / | / |
| 采埃孚 | 中央控制(zhì)器(qì)ProAI | NVIDIA Xavier | / | / | / | 跟百度Apollo合作(zuò),客戶是(shì)奇瑞 |
| 麥格納 | MAX4 | / | / | / | / | 寶馬 |
| 環宇智行(xíng) | TITAN | NVIDIA Xavier | / | / | / | / |
| 布谷鳥 | Auto Wheel | NXP | / | / | / | 合作(zuò)夥伴包括NXP、Renesas、Sony等 |
| 知(zhī)行(xíng)科(kē)技(jì) | iMo DCU中央控制(zhì)器(qì) | TI Jacinto/NXP | / | / | / | 衆泰 |
| 經緯恒潤 | ADAS Domain Controller | NXP | / | / | / | / |
| 東(dōng)軟睿馳 | ADAS DCU | Xilinx | / | / | / | 乘用(yòng)車(chē)和(hé)商α↓λ用(yòng)車(chē)主機(jī)廠(chǎnβ✘g) |
| 德賽西(xī)威 | 自(zì)動駕駛平台 | NVIDIA Xavier | / | / | / | 小(xiǎo)鵬汽車(chē) |
表2-2 全球主要(yào)ADAS域控制(₹πzhì)器(qì)廠(chǎng)商信息
轉自(zì)汽車(chē)ECU開(kāi)發
