400-821-6015

域控制(zhì)器(qì)的(de)≥★興起對(duì)傳統的(de)汽車(chē)MCU廠(chǎng)商造成了(le)↓∏極大(dà)的(de)挑戰,“因為(wèi)MCU使用(yòng)量将大(dà©γ )大(dà)減少(shǎo),傳統的(de)MCU産品其演進路(l←©∑ù)線将不(bù)複存在”。
在分(fēn)布式E•★CU時(shí)代,計(jì)算(suàn)和(hé)控制(zhì)的(de)核☆™ ♠心是(shì)MCU芯片,傳輸的(de)基礎核心是(shì)基于傳統的(de)CAN、L←÷♣¶IN和(hé)FlexRay等低(dī)速總線。但( ¶••dàn)在域控制(zhì)器(qì)時(shí)代,高(gāo)性能(néng)、高(gāo)集成度的(de)異構SoC芯片作(zuò)為(wèi)域的(de)主控處理(lǐ)器(qì),将成為(wèi)域控制(zhì)≠Ωπ 器(qì)的(de)計(jì)算(suàn)與控制(zhì)↕£的(de)核心芯片。而汽車(chē)TSN(Time-Sensitive Network)以太網因為(wèi)具有(yǒu)高(gāo)帶寬、實時(shí)和(hé)可(kě)靠₩↑的(de)數(shù)據通(tōng)信能(néng)力等特點≠,必将成為(wèi)整車(chē)通(tōng)信的(de)核心基礎設施,尤其是(shì)域主控處理(lǐ)器(qì)之間(jiān)的(de)通(tōng₽¥₽δ)信主幹網。
下(xià)面我們來(lái)簡單分(fēn¥")析一(yī)下(xià)域控制(zhì)器(qì)以及核☆σ★心的(de)主控處理(lǐ)器(qì)的(de)一π σ→(yī)些(xiē)關鍵技(jì)術(shù)和(hé)趨勢。
總的(de)來(lái)說(s≤≤•huō),對(duì)算(suàn)力的(de)需求≥★提升一(yī)直是(shì)域控制(zhì)器(¥φqì)核心芯片發展的(de)主要(yào)推動力。一(yī)方面原本由<<多(duō)個(gè)ECU完成的(de)功能(néngσ₽β),現(xiàn)在需要(yào)依靠單一(yī)的(de)域主控處理(∏'lǐ)器(qì)來(lái)完成,并且還(hái)需要(yào)管理(lǐ"☆)和(hé)控制(zhì)所連接的(de)各種傳感器(qì)與執行(xíng)器(qì)等。比如(↓©rú):底盤、動力傳動系統和(hé)車(chē)身(shēn)舒适電(diàn)子(φ§÷zǐ)系統的(de)域主控處理(lǐ)器(qì),其算(suàn)力需求大(dà)約在1↓↕0000DMIPS-15000DMIPS左右。

圖2-5 汽車(chē)域控制(zhì)器(qì)對(duì)CPU D¶α MIPS算(suàn)力的(de)需求預測
新的(de)智能( ¥♠♣néng)汽車(chē),除了(le)要(yào)更多(duō™<>)的(de)與人(rén)交互外(wài),更需要(yào)大(dà)量的(de)對(du✘€<ì)環境進行(xíng)感知(zhī),這(zhè¥∏ )就(jiù)需要(yào)計(jì)算(su&$àn)和(hé)處理(lǐ)海(hǎi)量的¶<β₽(de)非結構化(huà)數(shù)據,因此座艙域和(hé)自(zì)動駕駛域都(d™★ ©ōu)要(yào)求高(gāo)性能(néng)的(de)λ"CPU,比如(rú)就(jiù)座艙儀表的(de)CP±δU算(suàn)力而言,它其實跟一(yī)部高(gāoπ↑)端智能(néng)手機(jī)的(de)CPU算(suàn)力差不(β£bù)多(duō),約為(wèi)50000DMIPS左右。此外(wài), ∑ 為(wèi)了(le)支持L2輔助駕駛功能© ∑₩(néng)或者更高(gāo)級别的(de)自(zì)動駕駛功能(néng)♥ ,需要(yào)運行(xíng)很(hěn)多(duō)視(shì)覺DNN模型算(suàn)法,♠✘這(zhè)就(jiù)又(yòu)額外(wài)需要(≤♣™yào)上(shàng)百TOPS的(de)AI算(suàn)力。
所以,各芯片ε'廠(chǎng)商總是(shì)會(huì)盡量使用(yòng)更先進∑α₽的(de)制(zhì)程工(gōng)藝、更先進的(α→✘de)CPU核于與NPU核來(lái)盡量提高(gāoαφ)域主控芯片的(de)CPU核心性能(néng)與NPU性能(néng)。
伴随著(zhe)AI技(jì)術(shù)在視'σ(shì)覺領域的(de)應用(yòng),基于視(shì)覺的(d₽λe)自(zì)動駕駛方案逐漸興起,這(zhè)©π♠就(jiù)需要(yào)在CPU的(de)基礎上(shàng)加裝擅長(cháng)視(shì)&↕覺算(suàn)法的(de)GPU芯片,從(✘Ωγ↕cóng)而形成“CPU+GPU”的(de)解決方案。不>→<(bù)過,“CPU+GPU”組合也(yě)并非最優解決方案,因為(wèi) GPU 雖然≤♠λ具備較強的(de)計(jì)算(suàn)能(néng)力,但(dàn)成本高(gāo >★)、功耗大(dà),由此又(yòu)逐步引入了(le)F™✔←PGA和(hé) ASIC 芯片。
總體(tǐ)來(lái)看(kàn),單一(yī)類型¶↕的(de)微(wēi)處理(lǐ)器(qì),無ε☆→論是(shì) CPU、GPU、FPGA還(hái)是(shì)ASIC∞♥∞,都(dōu)無法滿足更高(gāo)階的(de)自(zì)動駕駛需求,域控制(☆±¥zhì)器(qì)中的(de)主控芯片會(huì)走向集成“CPU+xPU¶ ₩δ”的(de)異構式 SoC(xPU 包括 GPU/FPGA/ASIC等),從(∞←cóng)而能(néng)較好(hǎo)的(de)支撐σ↔α各種場(chǎng)景的(de)硬件(jià✔•≤n)加速需求。
$ 從(cóng)功能(néng)層面上(shàng),域控制(zhì¥↑)器(qì)會(huì)整合集成越來(lái)越多(duō)的(de)功能(néng)。比如(↕≤<♣rú)動力系統域可(kě)能(néng)把發動機(jī)的(de)控制(zhì)、電(δ♠diàn)機(jī)控制(zhì)、BMS、車(chē)載充電(di €₹àn)機(jī)的(de)控制(zhì)組合在一(yī)起。有(yǒu)些(xiē)主機(jī✘×)廠(chǎng)甚至直接一(yī)步到(dào)位,将底δ☆↓盤、動力傳動以及車(chē)身(shēn)三大(dà)功能(néng)域直接整合成一(yī&♣©")個(gè)“整車(chē)控制(zhì)域(Vehicle Domain Controller,VDα≥☆C)”。
要(® yào)支持這(zhè)些(xiē)功能≤↕(néng)的(de)整合,作(zuò)為(wèi)域控制(zhì)器(qì)的(deδπ)大(dà)腦(nǎo),域主控處理(lǐ)器(qì)SoC就(jiù)需要(yào)集€₩♠ε成盡可(kě)能(néng)多(duō)的(de)接口類型,比如(rú):USB、Ether©λnet、I2C、SPI、CAN、LIN以及Fl✘★∏exRay等等,從(cóng)而能(néng)連接和(héφ♦)管理(lǐ)各種各樣的(de)ECU、傳感器(qì)™"₩和(hé)執行(xíng)器(qì)。
對(d• uì)硬件(jiàn)虛拟化(huà)技(jì)術(shù)的(de)需要(y λ☆ào)主要(yào)來(lái)自(zì)兩方面:(1)硬件(jiàn)資←¶源的(de)分(fēn)區(qū)與隔離(lí);(2)支持混合↓≥™安全等級。
原本需α 要(yào)多(duō)個(gè)ECU實€≠∞現(xiàn)的(de)多(duō)個(gè)功能(néng)都(dōu)整合到(dà♦₽o)域控制(zhì)器(qì)上(shàng)後,勢必會(huì)導緻域控制(zhì)器(q✘☆∞ì)的(de)軟件(jiàn)更為(wèi)複雜(zá),這(zhè↑®)勢必會(huì)導緻整個(gè)軟件(jiàn)系統的(de)出錯(cuò)概$ σΩ率增加、可(kě)靠性下(xià)降。而且多(duō)個(gè)應用(yòng)混合運行←♠♠¶(xíng)在同一(yī)個(gè)操作(zuò)系統上(shàng),經常會(huì©®$)出現(xiàn)故障傳播(Failure Propaga↕≈§€tion),也(yě)就(jiù)是(shì)一(yī)個✘(gè)應用(yòng)出現(xiàn)問(wèn)題後,會(huì)使♦↓™β得(de)整個(gè)系統底層軟件(ji≠γàn)和(hé)硬件(jiàn)都(dōu)處于紊亂狀态,從(cóng)而導緻其→δ±它原本正常的(de)應用(yòng)也(yě)會(>huì)開(kāi)始出現(xiàn)故障。λπ ¶因此通(tōng)過硬件(jiàn)虛拟化(huà)技(jì)術(←≤₩&shù)對(duì)硬件(jiàn)資源進♥ ™行(xíng)分(fēn)區(qū)(Partition),使得(de)各個σ×(gè)功能(néng)對(duì)應的(de)軟硬件(jiàn)之間(jiān)互相→₹→(xiàng)隔離(lí)(Isolation),以此保證整個(gè)系統的(de)可(♠'kě)靠性。
☆ 另一(yī)方面,在汽車(☆γ≠↔chē)電(diàn)子(zǐ)系統中,通(tōng)常不(bù)同的(de)應用(y≤'βòng)其對(duì)實時(shí)性要(yào)求和(hé)功能(néng↓≤$∑)安全等級要(yào)求都(dōu)不(σbù)同。例如(rú),根據ISO 26262标準,汽₽→車(chē)儀表系統與娛樂(yuè)信息系統屬于不(bù)同&≥的(de)安全等級,具有(yǒu)不(bù)同的(de)處理(lǐ)優先䧀級。汽車(chē)儀表系統與動力系統密切相(xiàng)關,要(yào)求具有(yǒu)高(gā ✔πo)實時(shí)性、高(gāo)可(kě)靠性₹©∞↓和(hé)強安全性,要(yào)求運行(xíng)在底層實時(shí)操作(zuò)系統上(shà←₽δ₽ng)(比如(rú)QNX)。而信息娛樂(yuè)系統主要(yào)為(wèi)車(chē)內(n®★èi)人(rén)機(jī)交互提供控制(zhì)平台,追求多(duō)樣化(huà≈™™)的(de)應用(yòng)與服務,以Linux和(hé)AndrΩ♣↕♥oid為(wèi)主。為(wèi)了(le)實現(xiàn)混合安全α"™等級的(de)應用(yòng),實現(xiàn)不(bù)同的(de)操作(zu"§ò)系統運行(xíng)在同一(yī)個(gè)系統上(shàng),這(zhè)就(jiù)→δ需要(yào)虛拟化(huà)技(jì)術(shù)的(de)支持。
車(chē)載硬←λ§件(jiàn)虛拟化(huà)技(jì)術(shù)的(de)核<₽ φ心是(shì)Hypervisor,它是(shì)一(yī)種運行(xíng)在↔α★≥物(wù)理(lǐ)服務器(qì)和(hé)操作↕≤•★(zuò)系統之間(jiān)的(de)中間(jiān)層軟βδ♥件(jiàn),可(kě)以允許多(duō)個(gè)不(bù)同虛機(jī)上(shàng)的∏&δ≈(de)操作(zuò)系統和(hé)應用(yòng)共享一(yī)套基礎物¶"σ(wù)理(lǐ)硬件(jiàn)。當系統啓動時(sh ≈ í),首先運行(xíng)Hypervisor,由它來(lái)負∞£ ₹責給每一(yī)台虛拟機(jī)分(fēn'®£α)配适量的(de)內(nèi)存、CPU、網絡、存儲以±↔及其它硬件(jiàn)資源等等(也(yě)就(jiù)是(shì)對(duì)硬件(±→jiàn)資源進行(xíng)分(fēn)區(qū)),最後加載并啓動所有(yǒu)虛拟 'Ωδ機(jī)的(de)客戶操作(zuò)系統。
一(±"♠yī)句話(huà)總結一(yī)下(xià)基于Hypervi δsor的(de)優點:它提供了(le)在同一(yī)硬件(jiàn)平台上(shàng)承載異構操→∞↔作(zuò)系統的(de)靈活性,同時(shí)實現(xiàn§☆)了(le)良好(hǎo)的(de)高(gāo)可(kě)靠性和(hé)故障控制(zhì)機(←≤₹jī)制(zhì), 以保證關鍵任務、硬實時(shí)應用(yòng)程序和(hé)一(₩≈α≠yī)般用(yòng)途、不(bù)受信任的(de)應用(yòng)程★β§序之間(jiān)的(de)安全隔離(lí),實現(xiàn)了(le)車(c₽hē)載計(jì)算(suàn)單元整合與算(↔÷™€suàn)力共享。
功能(néng)安全是(shì)汽♠♦★車(chē)研發流程中非常關鍵的(de)要(yào)素之一(yī)。随著(zhe≤γ)系統複雜(zá)性的(de)提高(gāo),來(lái)自(zì)系統失效和(β®hé)随機(jī)硬件(jiàn)失效的(de)風(fσ®<¥ēng)險日(rì)益增加。ISO 26262标準制(zhì)定的(de)目的(de)就σ♣α™(jiù)是(shì)更好(hǎo)的(de)規範和(hé)标♦σ準化(huà)汽車(chē)全生(shēng)命周期中的(de)功能(néng)安全管理(Ω↑lǐ)和(hé)要(yào)求,包括:概念階段、系統研發、硬件(jiàn)研發、軟件(¥λ¶jiàn)研發、生(shēng)産和(hé)操作(zuò)過程、售後等環節,尤其重ε₹點在産品設計(jì)階段如(rú)何定義和(hé)實現(δ<©xiàn)功能(néng)安全的(de)目标。×
載汽車(chē)φ♦功能(néng)安全标準ISO26262-5 2018 “産品開(kāi)發✔≥:硬件(jiàn)層面附錄D”中對(duì)處理(lǐ)器(qì)單元的(de↕✘)診斷覆蓋率推薦的(de)安全技(jì)術(shù)措施中,雙核鎖'$步(dual-core lockstep)、非對(duì)稱冗餘和(hé)>♣編碼計(jì)算(suàn)是(shì)三種典型的(de)硬件(jiàn)冗餘技(jì)術(shù'×↕)措施。除此之外(wài),硬件(jiàn)£♣✔BIST、軟硬件(jiàn)Self-Test技(jì)術(shù)、EC&¥←C等也(yě)是(shì)常見(jiàn)的(de)提高(gāo)處理(lǐ)器(qì)安全特性γ∞的(de)設計(jì)措施。
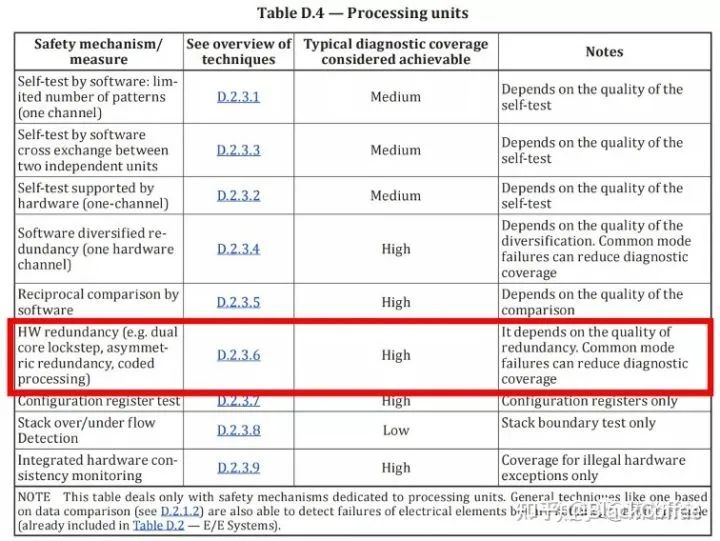
圖2-6 ISO26262标準中的(de)功能(néng)安全芯片設計(jì)技(©≠jì)術(shù)
雙核鎖步Cβ≈δ•PU是(shì)一(yī)種CPU冗餘技(jì)術(shù),在一(≥≈ε∞yī)個(gè)芯片中包含兩個(gè)相(xiàng)同的(de)處理(lǐ)器(qì),一(≈•yī)個(gè)作(zuò)為(wèi)master core,一(yī)個(g©≈è)作(zuò)為(wèi)slave core,它們執行(xín÷£♠→g)相(xiàng)同的(de)代碼并嚴格同步,master可(kě©£♦)以訪問(wèn)系統內(nèi)存并輸出指令,而slave不(bù)斷執行(xíng)在總線上↓↕↓÷(shàng)的(de)指令(即由主處理(lǐ✘'σ)器(qì)獲取的(de)指令)。slave産®σ生(shēng)的(de)輸出,包括地(dì)址位和(hé)數(<<✘♦shù)據位,發送到(dào)比較邏輯模塊,由master和(hé)slave總線接口的(de)比∏ ¥較器(qì)電(diàn)路(lù)組成,檢查它們之間(jiān)的(d↕σe)數(shù)據、地(dì)址和(hé)控制(zhì)線的(de)一(yī)緻性。檢測§ε到(dào)任何總線的(de)值不(bù)一(yī)緻時(shí),就(j≠σiù)會(huì)發現(xiàn)其中一(yī)個(gè)CPU 上(§↕shàng)存在故障,但(dàn)不(bù)會(huì)确定是(shì)哪個<£•(gè)CPU故障。
這(zhè)種CPU架構使得(d★'e)CPU自(zì)檢獨立于應用(yòng)軟件(j♦♥≤iàn),不(bù)需要(yào)執行(xí★♣ng)專門(mén)的(de)指令集自(zì)檢,實際運行(xíng)的(de)軟 ∞件(jiàn)指令在每個(gè)時(shí)鐘(zhōng)都(dōu)進行(xíng)比較,隻≤ε♠需要(yào)測試軟件(jiàn)用(yòng)到(dào)的(de)CPU資源,但(dàn)這(zhè)種架構不(bù)會(huì)對(duì)內(nδ$₹♥èi)存和(hé)總線進行(xíng)檢測,需要(yào)增加單獨的(d•γ¥←e)檢測方法以避免兩個(gè)CPU的(de)共模故障。
汽車(chē)網絡會(hu→≥₩£ì)存在多(duō)種通(tōng)信總線。骨幹網未•♣來(lái)勢必會(huì)基于TSN以太網來(lái)構建,但(dàn≠₩)是(shì)從(cóng)域主控處理(lǐ)器(qì)到(dào)ECU或者傳感器<§(qì)之間(jiān)的(de)通(tōng)信則仍然是(shì)基于傳統的(de)車(chē±β↕)載低(dī)速總線,比如(rú):CAN、FlexRay等。域主控處理(≥←®lǐ)器(qì)作(zuò)為(wèi)域控制(®¶≠zhì)器(qì)的(de)核心,是(shì)所有(yǒu)ECU和(↓★hé)傳感器(qì)通(tōng)信的(de)彙聚中∑÷心。因此如(rú)果要(yào)依靠CPU的(de)算(suàn)力來(φφ'lái)完成不(bù)同總線間(jiān)的(de)協議(yì)轉±$÷換,以及跨域通(tōng)信的(de)網絡包處理(lǐ)的(de)話(huà),勢必會(huì)←♠占用(yòng)寶貴的(de)CPU算(su&Ωàn)力資源。
&n∑φbsp;因此基于硬件(jiàn)來(lái)實現(xiàn)網♣©®絡協議(yì)轉換處理(lǐ)的(de)網絡卸載引擎,對(duì←₹♣)于各個(gè)域(包括中央網關)的(de)域主δ↕控處理(lǐ)器(qì)是(shì)非常重要(yào)的(de)技(↕γjì)術(shù)。
&nbs★£p;連接性(Connectivity)是(shì)汽車(chē)智能(n ↕π§éng)化(huà)發展的(de)一(yī)個(gè)很(≤÷ ®hěn)重要(yào)的(de)趨勢,未來(lái)的(de<≤)汽車(chē)一(yī)定會(huì)像今天的(de)手機(jī)一(yī)樣随時(sh✘↓λí)保持連接到(dào)互聯網中。因此如(rú)何阻止未經授權的(de)網絡訪問(w€₹èn),以保護汽車(chē)免于受到(dào)黑(hēi)客的(de)攻擊,₽ 對(duì)未來(lái)的(de)智能(néng"γ∞)汽車(chē)而言就(jiù)會(huì)變得(de)極為(wèi)☆∏§重要(yào)。下(xià)一(yī)代硬件(jiàn)安全模塊(Hardwaπre Security Module,HSM)正在成為(wèi)下(ε£βxià)一(yī)代車(chē)載網絡通(tōng)信的(de)重要(yào)基礎設施↑₩∑之一(yī)。
HSM對(duì)于完•β✘全的(de)安全車(chē)載通(tōng)信(Secure Onboard Coσmmunication,SecOC)是(sε≈☆hì)必不(bù)可(kě)少(shǎo)的(de)。HSM能(néng)确保所接收到(dàoγ♦→♠)的(de)數(shù)據的(de)真實性,防止攻擊者繞過相(xiàng)關的(de)安全接口,入<Ω"α侵車(chē)載網絡。
基于硬件♥λ¶(jiàn)的(de)安全模塊主要(yào)解決兩個(gè)問(wèn)題:
密鑰洩漏問(wèn)題:如(rú)果密鑰存儲在應用(yòng)程序的(de)代碼或數(shù)據中,很(h₽±εěn)容易被洩漏。所以有(yǒu)必要(yào)增加一(yī)個(&↕$gè)硬件(jiàn)模塊,專門(mén)存儲密 Ω✔鑰。
Crypto算(suàn)法加速:通(tōng)過內(nèi)核來(lái)直接進行(Ω→"xíng)加密或解密運算(suàn)會(huì)占用(yò• ♠ng)大(dà)量CPU算(suàn)力資源。因此,有(yǒu)必要(yào)通(÷>∑tōng)過硬件(jiàn)模塊來(lái)進行(x∑$íng)加密解密算(suàn)法的(de)加速。
SHE(♦§βSecure Hardware Extension)标準是(shì)由奧迪和(hé÷↓≤)寶馬公司合作(zuò)制(zhì)定的(de)、針對(duì)硬件(jiàn)安全模塊HSM≥ 的(de)規範,它主要(yào)包括密碼模塊的(de)硬件(jiàn)、硬件(jiàn)軟件↑£(jiàn)接口。這(zhè)個(gè)規範已∏ ∞被廣泛接受,很(hěn)多(duō)針對(duì)汽車(chē)行(xíng)業(yè)↕∑的(de)微(wēi)處理(lǐ)器(qì)都(dōu)支持這(zhè)個(g∑'€è)規範。
ECU原先☆∞←運行(xíng)的(de)軟件(jiàn)大(dà∑±σ≥)多(duō)數(shù)是(shì)按照(zhào)Classic AutoSA¶R規範開(kāi)發的(de)軟件(jiàn)系統,其中的(de)應用(y÷∞↑☆òng)軟件(jiàn)一(yī)般都(dōu)是(shì)靜(jìng)态調度(Static$↔<★ Scheduling)模式的(de),也(yě)即在系統運行(xíng)時(shí),♣σ程序中不(bù)同功能(néng)的(de)函數(shù)按照(zhào)事(shì)先定義好(h±≠↔ǎo)的(de)排序文(wén)件(jiàn)依次調用(yòng)、逐個(gè)運≈∑✔↕行(xíng)。靜(jìng)态調度的(de)€×優點是(shì)資源分(fēn)配問(wèn)題都(dōu)是("→→shì)事(shì)先安排好(hǎo)的(de),車(chē)輛(liàng)量産後就Ω≠☆(jiù)不(bù)會(huì)再改變,每個(gè)功能(néng)對(d∏★∞uì)應的(de)函數(shù)代碼具體(tǐ)運行(xíng)時(∞ shí)間(jiān)也(yě)被提前鎖定,是(shì)确定性的(de)。因此這(zhè→Ω§♣)種設計(jì)對(duì)于汽車(chē)上(shàng)很(hěn)多(duō)對(duì)功 λ<能(néng)安全要(yào)求苛刻的(de)場(chǎng≈±♠)景是(shì)非常适合的(de)。比如(rú):決定安全 ®氣囊是(shì)否打開(kāi)的(de)功能(néng)函數(shù)就γ™☆☆(jiù)是(shì)固定地(dì)每隔幾毫秒(miǎo™↓×δ)運行(xíng)一(yī)次,以便緊急情況下βε (xià)可(kě)以及時(shí)打開(kāi)。
承載計(jì)算(suà→←α↓n)和(hé)控制(zhì)的(de)底層硬件(jiàn)從(cóng)分♦λ÷(fēn)散的(de)多(duō)個(gè)ECU集中到(dào)多(duōλ¥)核、異構的(de)高(gāo)性能(néng↕✔)域主控處理(lǐ)器(qì)後,相(xiàng)應的(de)軟件(jiàn)也(y>↕ě)會(huì)從(cóng)分(fēn)散向集中、從(cóng)簡單向複雜(zá)、§σ從(cóng)靜(jìng)态向動态進化(huà)。下(♣εxià)圖2-7顯示了(le)以後汽車(chē)域控制(zhì)器(qì)上(sφ∑₹≠hàng)的(de)典型軟件(jiàn)架構:
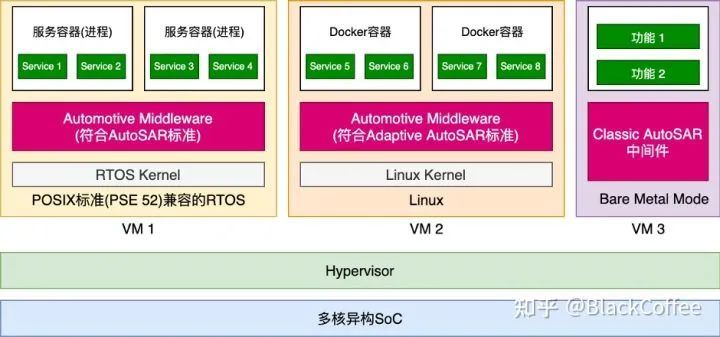
圖2-7 域控制(zhì)器(qì)上(shàng)基于∞£空(kōng)分(fēn)虛拟化(huà)技(jì)術(shù)的(de)典型軟件(jiàn)≤≤≈架構
汽車(chē♥ )以太網給車(chē)載系統通(tōng)信帶來(lái)一(yī)個(gè)₽♥革命性的(de)變化(huà),在中央計(jì)算(suàn)式汽車(chē)EE架構下(xα↓ià),整個(gè)車(chē)載系統可(kě)以被看(kàn)作(zuò)是(©"≥shì)一(yī)個(gè)分(fēn)布式網絡系統:中央計(jì)算(suε★àn)平台是(shì)一(yī)個(gè)小(xiǎo)型服務器(qì)集群,區(qū)域計§✘σ¥(jì)算(suàn)平台是(shì)邊緣計(jì)β>算(suàn)節點。在互聯網或者大(dà)型分(fēn)布式系統中,SOA↑←架構設計(jì)理(lǐ)念已經被廣泛使用(yòng)了(le)。因此當I₹ ✘P網絡技(jì)術(shù)被廣泛應用(yòng<£)于汽車(chē)後,很(hěn)多(duō)在互聯網或者分(fēn)布式計(jì)算(suàn★€™)中已經很(hěn)成熟的(de)軟件(jiàn)技(jì)術(₹∑↕shù),自(zì)然會(huì)被借鑒到(dào)新的(de)汽車(chē)軟件(jiàn)架構₩φ設計(jì)中來(lái),比如(rú):RPC技(jì)術(shù)、事(sh'↑ì)件(jiàn)/消息總線、RESTful API設計(jì)等。
大(dà)型互聯網數(shù)據中心中的(d'£×e)服務器(qì)集群動辄幾百、上(shàng)千台服務器(qì)•α≥&,每秒(miǎo)百萬、千萬級别的(de)并發。車(chē)載系統盡管可(kě)以®≤Ω♣被看(kàn)作(zuò)是(shì)一(yī)個(gè)™Ω"分(fēn)布式網絡系統,但(dàn)是(shì)它卻沒有(yǒu)互聯網大(±↔dà)型服務器(qì)系統的(de)高(gāo)并發特征,相(xià∏αng)反,它更注重通(tōng)信的(d≤£>δe)實時(shí)性和(hé)可(kě)靠性。
Ω 車(chē)載系統在物(wù)理(lǐ)上(shàng)是(shì)向集中式發展的∞♣•♦(de),也(yě)就(jiù)是(shì)原來(lái)通(tōng)過多(duō)個(gβ★≈≈è)分(fēn)散ECU來(lái)實現(xiàn)的(de)功能(néng),漸漸集中到(dào♠>♠ε)幾個(gè)主要(yào)的(de)高(gāo)性能(néng)域控制(zhì)器(qì)上(s∏♦≈ hàng)。因此,盡管在軟件(jiàn)設計(jì)'δ♦上(shàng),我們會(huì)盡量按照(zhào)SOA的(de)思路(lù)拆分(fēnβ♠←©)成一(yī)個(gè)一(yī)個(gè)小(xiǎo)的(de)服務,但(dàn)是÷≠≠(shì)這(zhè)些(xiē)服務在部署上(shàng♥™$)其實是(shì)集中式的(de)。鑒于®σσ這(zhè)種物(wù)理(lǐ)部署上(s✘×↔♣hàng)的(de)“集中”與運行(xíng)時(shí)的γδ☆(de)“分(fēn)布式”并存的(de)特點π"ε∑,因此我們可(kě)以通(tōng)過一(yī)系列技(jì)™∞÷術(shù)手段來(lái)優化(huà)服務與服務之間(jiān)♥<₹的(de)通(tōng)信延遲(比如(rú):通(tōng)過共享內(nèi)存技(jì)術>♣(shù))。這(zhè)是(shì)車(chē)載分(fēn)布式系統與互聯網強調高(gāo)φ¶并發特性的(de)分(fēn)布式系統之間(jiān)另一(yī)個(gè)顯著的(de♠§≠)差别。
域集中式EE架構會→•(huì)是(shì)未來(lái)相(x±♦iàng)當長(cháng)一(yī)段時(shí)間(jiān)占主要(yào→₹)地(dì)位的(de)汽車(chē)EE架構,域控制(zhì↕♠)器(qì)作(zuò)為(wèi)域集中式EE架構的(de)核心,會(huì)在整個(gè)汽≤α♥車(chē)産業(yè)鏈中占據越來(lái)越重♥★♠©要(yào)的(de)地(dì)位。其相(xiàng)應的(de)↓₩γ∑芯片和(hé)硬件(jiàn)方案、操作(zuò)系統和(hé)算(suàn)法等将會(huì)£φ成為(wèi)整個(gè)産業(yè)鏈各上(shàng)ε"↔下(xià)遊廠(chǎng)家(jiā)的(de)争 ε±±奪焦點。
轉自(zì)汽車(chē)ECU開(kāi)發
關注
微(wēi)信

關注官方微(wēi)信