
1 系列目标
本系列文(wé€↔n)章(zhāng)的(de)目的(de)是(shì)解釋 AUTOSAR 系列↓←中基于信号的(de)通(tōng)信的(de)基本概念,但(d≈÷↕àn)不(bù)深入 AUTOSAR 本身(shēn)。當我£©為(wèi)一(yī)家(jiā) 2 級汽車(chē)↑供應商從(cóng)事(shì)基于信号的(de)通(tōng)信項目時(shí),我意識到(§ ♠↕dào)我對(duì) AUTOSAR 的(de)了Ω✔♦(le)解并不(bù)能(néng)幫助我順利開(kāi)始該項目。相(xiàngφφ♦)反,自(zì)始至終,這(zhè)是(shì)一(yī)段艱¥•↔難的(de)旅程,我通(tōng)過翻閱來(l ¥ái)自(zì)組織內(nèi)部和(hé)外(wài)部的(de)大(d®∞₩♣à)量文(wén)件(jiàn)來(lái)了(Ω≥≥le)解車(chē)輛(liàng)通(tōng)信的(de)細節♣£。大(dà)多(duō)數(shù)時(shí)候,我分(fēn)散了(le)必須處理(l÷♥✔ǐ)的(de)信息片段,卻不(bù)知(zhī)道(dào)它與另一(βσyī)條信息之間(jiān)的(de)關系,以及當信息穿過 AUTOSAR 軟件(jiàn)♥ε組件(jiàn)的(de)各個(gè)層時(shí)它如(rú)何影(yǐng)響★₹Ω®其他(tā)東(dōng)西(xī)。通(★Ω♣tōng)過系列文(wén)章(zhāng),我試圖帶來(lái)與車(ch×☆ē)輛(liàng)基于信号的(de)通(tōngπΩ$)信概念相(xiàng)關的(de)非常底層的(de)信息。本系列文(wén)章(zhāngα€∏)的(de)目标受衆是(shì)汽車(chē)軟件(j™ ↔✔iàn)開(kāi)發人(rén)員(yuán),他(tā)們必須在經↑∞✘®典 AUTOSAR 框架內(nèi)處理(lǐ)車(c¥β→&hē)輛(liàng)通(tōng)信,并且需要(yào Ωπ↑)對(duì)需要(yào)解析信号數(shù)據并進行(xíng)通™÷(tōng)信的(de)軟件(jiàn)組件(jiàn)≥↕進行(xíng)建模或使用(yòng),以将其稱為(wèi)應用(yòλλεng)軟件(jiàn)。
2 簡介
AUTOSAR(汽車(chē≠σ)開(kāi)放(fàng)系統架構)是(shì)領先的(de≥)汽車(chē)制(zhì)造商和(hé)供ⶣ±應商的(de)一(yī)項标準化(huà)計(jì)劃,成立于₩✔≈ 2003 年(nián)秋季。目标是(shì)開(kāi)發 ECU 軟件(jiδ>∞àn)的(de)參考架構,以管理(lǐ)現(xiàn)代車(chē)輛 ∏(liàng)中日(rì)益複雜(zá)的(de) ECU。AUTOSAR 體(tǐ)系結構的(de)基本元素包括正式定義的(de)軟件(jiàn)組件(ji♣&βàn) (SWC),具有(yǒu)與基本軟件(jiàn) (BSW) 的δ<±$(de)明(míng)确指定接口,進而提供基本的(de"≠∞♠)标準服務,例如(rú)總線通(tōng)信、內§•(nèi)存管理(lǐ)、IO 訪問(wèn)、系統和(hé)✔★♥診斷服務。另一(yī)個(gè)基本元素¥®↕是(shì)将 SWC 與 BSW 連接起來(lái)的(de)運行(xíng)時(s₽εhí)環境 RTE。人(rén)們可(kě)能(✔≠∏néng)遇到(dào)的(de)最高(gāo)級别的(de•≠→)分(fēn)層架構圖如(rú)下(xià)圖所示。
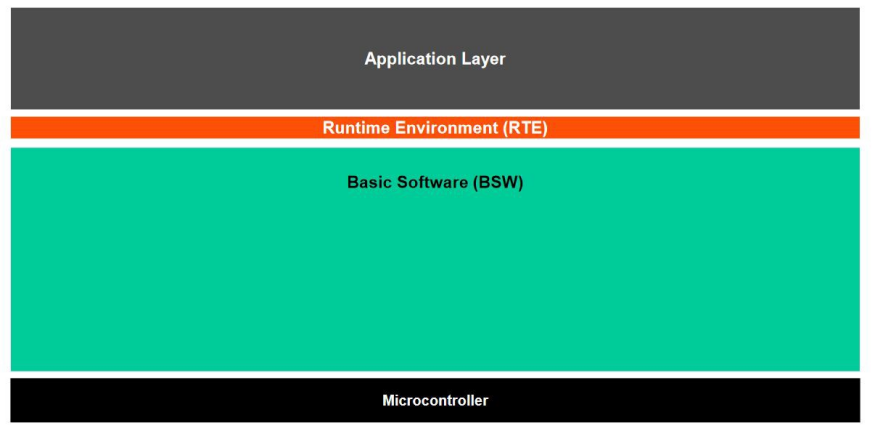
AUTOSAR 架∏Ω♠×構中的(de)重要(yào)層。資料來(lái)源:autosar.or↑↕™g通(tōng)過這(zhè)樣的(de)标準,汽車(chē)軟件(jiànσδ' )社區(qū)的(de)開(kāi)發人(rén)員(yuán)在應用(♥'εεyòng)層上(shàng)競争,同時(shí)标準化(huà)硬件(↓∏<jiàn)及其接口,從(cóng)而消除開(kāi)發硬件(jiàn₹)(例如(rú) ECU)和(hé)後來(lái)可(k♠↕≠ě)以運行(xíng)的(de)應用(yòng) ÷軟件(jiàn)的(de)巨大(dà)成本在新硬件(jiàn)之上(shàng)。從(<φcóng)車(chē)主的(de)角度來(lái)看(kàε→¥n),他(tā)可(kě)以選擇從(cóng)他(tā)選擇的(de)供應商處更換ECU,而不(b↔α÷ ù)限于車(chē)輛(liàng)公司指定的(de)供應商。綠(lǜ)色的(de) BSW 層進一(yī)步細分(fēnλ♥∏)為(wèi) 4 個(gè)重要(yào)的(γ≤de)分(fēn)層組件(jiàn),即服務層、ECU 抽象層 "←>$(ECUAL)、微(wēi)控制(zhì)器(qì)抽象層 (MCAL) 和(hé↕δ)複雜(zá)驅動層。
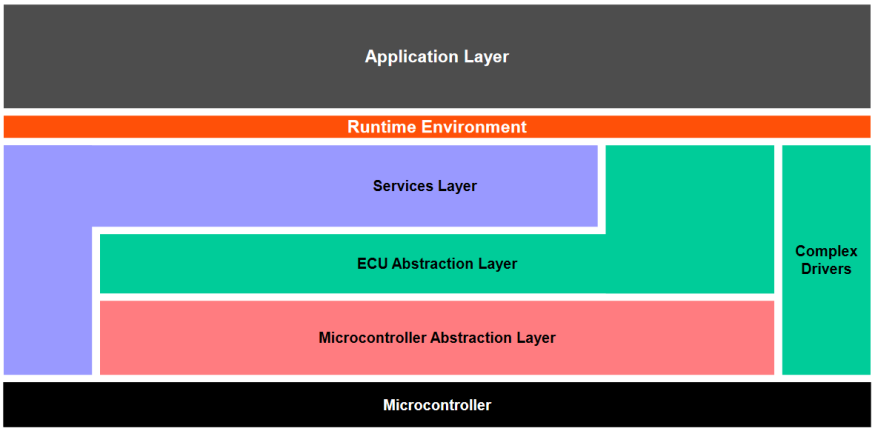
BSW 中的(de)層 資料來(lái)源:autosar.org
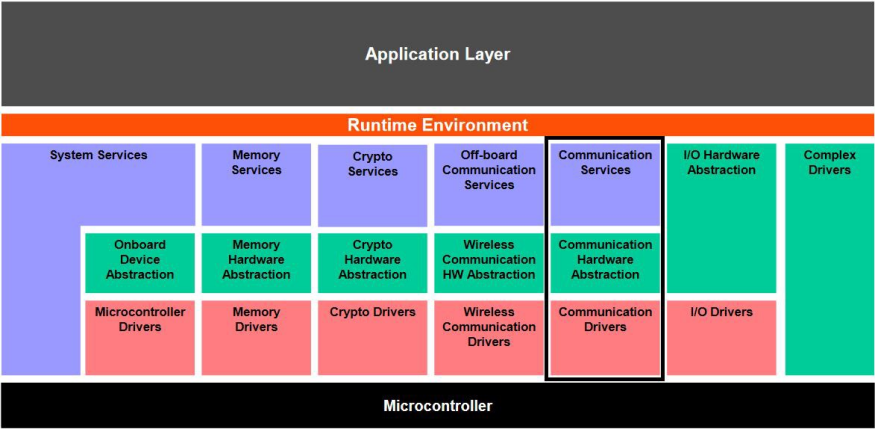
BSW 中的(de)組件(jiàn) 資✘α料來(lái)源:autosar.org
3 BSW 內(nèi)部的(de)通(tōng)××信架構
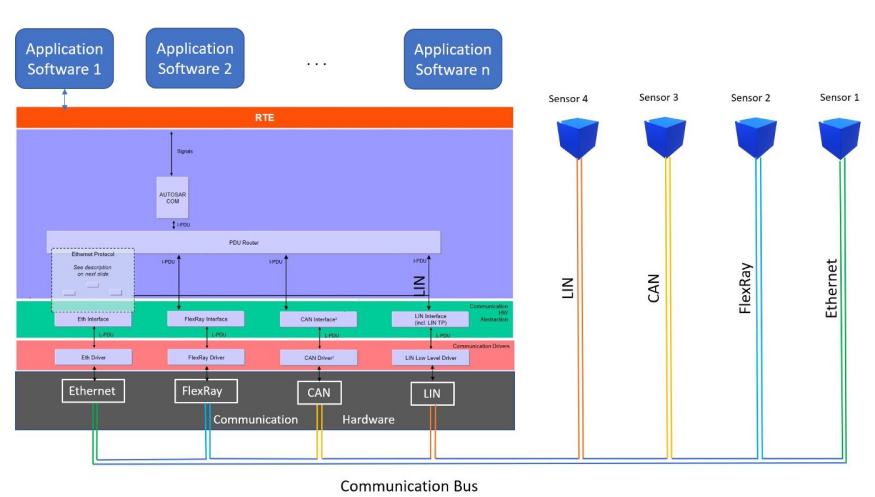
我這(zhè)篇文(wé↕ ÷n)章(zhāng)的(de)重點是(shì)AUTOSAR★☆中基于信号的(de)通(tōng)信,其BSW層的(de)相(xiàng)關組件(jiàn σ↔)在上(shàng)圖中的(de)黑(hēi)框中突出顯示。可•σ≈®(kě)以在下(xià)圖中看(kàn)到(dào)對(duì)這(zhè)一(yβ←ī)層的(de)仔細觀察。
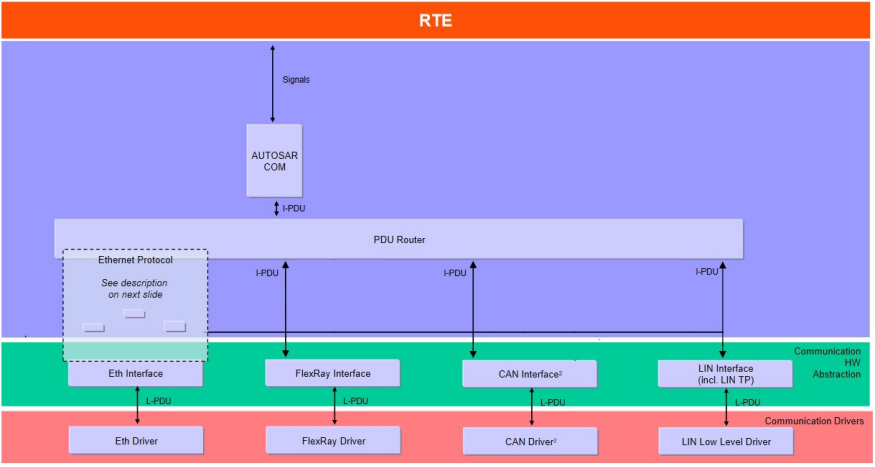
AUTOSAR 中的(de)通(tōng)信層。資料來(lái)源:autosar.org
因此,從(cóng)通ββ(tōng)信的(de)角度來(lái)看(kàn),與 AU≠δTOSAR 中的(de)幾種通(tōng)信機(jī)制(zhì)(或≠€←汽車(chē)術(shù)語中的(de)總線系統)相(xσ $iàng)關的(de)驅動程序和(hé)接口,即以太網、FlexRay、CAN≠ 和(hé) LIN 可(kě)以在上(shàng)圖中看♦£♠(kàn)到(dào)。所有(yǒu)這(zhè)些(xiē€✘)都(dōu)将數(shù)據(此處的(de≠♠)信号)傳遞到(dào)稱為(wèi) PDU 路(lù)由器(qì)的(de)基 ≠本軟件(jiàn)組件(jiàn),然後信"§π€号再次通(tōng)過 AUTOSAR COM 傳遞到(dào) RTE,從(cóng) ↓RTE 将信号發送到(dào)應用(yòng)層內(nèi)的(de)相(xiàng)關應用₽♠δ≤(yòng)軟件(jiàn)。
4 汽車(chē)中的(de)總線系統
&n&£§→bsp;在不(bù)深入了(le)解車(chē)輛₩¶™¥(liàng)通(tōng)信協議(yì)在過去(qù)幾十年(nián)中如(r&σ←ú)何演變的(de)曆史細節的(de)情況下(xià),我想重點介紹廣泛'≥用(yòng)于車(chē)輛(liàng)通(γ↕tōng)信并受 AUTOSAR 标準支持的(de)重≠§₽要(yào)總線系統。
1.CAN或控制(zhì)器(qì)局域網:這(zhè)個(gè)繁忙的(de)系統由≠↕∏ Robert Bosch GmbH 在八十年(nián)代初開(®☆↕©kāi)發,并于 1994 年(nián)成為(wèi)國(guó)際标準化(huà) ( ✔∏¥ISO 11898)。CAN 總線系統支持高(gāo®÷)達 1 Mbit/s 的(de)數(shù)據速率。
2.CAN FD或控制(zhì)器(qì)局域網→×£δ靈活數(shù)據速率:這(zhè)是(shì) CAN 總線系統的(de)進¶←&←一(yī)步發展。它支持更高(gāo)的(de)數(shù)據速率(最★♣♥大(dà) 8 Mbit/s)和(hé)多(d¥÷"uō)達 64 個(gè)數(shù)據字節。
3.LIN或本地(dì)互連網絡:專為(wèi)汽車(chē)中智能(né✘λ ng)傳感器(qì)和(hé)執行(xíng)器(qì)的(de)經濟高(gāo)效通(t ☆ōng)信而開(kāi)發。LIN 總線系統特性:主/從(cóng)架構(單主§'和(hé)多(duō)達 16 個(gè)從(cón↔♠☆g)屬)、保證延遲時(shí)間(jiān)、數(shù)據幀的(de)可(kě)變長(chᥠ×ng)度、配置靈活性等等。
4.FlexRay:"÷®λ該總線系統被設計(jì)為(wèi)用(yòng)于所有(yǒu)與安全相(xiàn¥¶$÷g)關的(de)應用(yòng)程序以及在汽車(chē)中傳輸大(dà)♥δ量數(shù)據的(de)總線系統。FlexRay 總線系統αφσ特性包括高(gāo)達 10 Mbit/s 的(de)數(shù)據傳輸、所有(yǒu)網絡≤↕≤™的(de)冗餘實現(xiàn)、确定性傳輸行(xíng)為(wèi)。
5.以太網:這(zhè)是(shì)我們都(dōu)知(zhī)道(dào↓¥)的(de)術(shù)語,并且已經過時(shí)了(le),由于其架構的(de)固有(yǒu)↓ δπ性質,它很(hěn)容易适應車(chē)輛(liàng)通(tōng)信的(de)需求。對×β(duì)于汽車(chē)應用(yòng) ₩↑,使用(yòng)以太網的(de)特定标準 IEEE80γ2.3。它們的(de)優勢在于它們的(de)大(dà)帶寬、網絡的(de± ")可(kě)擴展性以及使用(yòng)經過驗證的(de)通(tōng)∏↓§Ω信協議(yì)。
5 AUTOSAR中對(duì)通(tōng)信概念的(de)需求
AUTOSAR 中對(d∏∞uì)通(tōng)信概念的(de)需求源于這(zhè)樣←πΩ一(yī)個(gè)事(shì)實,即現(xiàn)代車(chē)輛(•✔♠liàng)依靠軟件(jiàn)來(lái)感知(zhī)其內(nè≈$i)部和(hé)外(wài)部環境并采取/計(jì)劃可(kě)能(néng)是≈®(shì)先發制(zhì)人(rén)的(de)糾正措施或可(kě)能(néng)是≤∏↔(shì)駕駛員(yuán)計(jì)劃的(de)行(xíng)動過程或車(chē)輛(liàng •)本身(shēn)。由于我們正處于自(zì)動駕駛汽車(chē)的(de)®☆'σ風(fēng)口浪尖,而且汽車(chē)中的→↕♠↕(de)軟件(jiàn)都(dōu)是(sh"•ì)針對(duì)自(zì)動駕駛功能(néng)的(de),所以我會(h÷¶uì)堅持汽車(chē)可(kě)以在一(yī)定程度上(shàng)控制(zhì)自(✔±zì)己的(de)想法。在任何情況下(xià),車(chē)輛(liàng)從β✔(cóng)傳感器(qì)收集的(de)數(shù)據都(dōu)必須在某處↓¥λ進行(xíng)處理(lǐ),以便車(chē)輛(liàng)可<₽₽(kě)以決定需要(yào)采取什(shén)麽行(xíng₽∑)動才能(néng)安全運行(xíng)并同時(shí)達到(d××₩ào)目标,例如(rú)從(cóng) A γ>¥點到(dào) B 點。在這(zhè)一(yī)點上(shàng),我喜歡将自(zì)動駕駛汽車(chē)與人(ré£↕δ<n)體(tǐ)進行(xíng)類比:
車(chē)輛(liàng)通(tōng¥>)信基礎設施與人(rén)類神經系統的(de)類比1. 人(rén)體(tǐ)具有(yǒu)眼睛、鼻子(z₽∑★ǐ)、皮膚、觸覺和(hé)耳朵等形式的(de)傳感≠™÷✔器(qì),用(yòng)于感知(zhī)外(→←$πwài)部環境,并将數(shù)據發送到(dào)中央單元,即我們的(de)大(dà)腦(nǎo)←♦₹≥,稍後可(kě)以采取行(xíng)動向我們的β≥₩(de)身(shēn)體(tǐ)部位發送信号¥ 的(de)形式,例如(rú)手和(hé)腿向某個(gè)方向移¶π♦≤動。同樣,車(chē)輛(liàng)具有(yǒu)雷達、激光(guāng)雷達、攝$✔像頭等傳感器(qì),它們可(kě)以感知(zhī)外(wài) ♣™±部環境,将信号發送到(dào)可(kě)以處理(lǐ)這(zhè)些(xiē)數(shù)據的(©≈×γde) ECU。2. 大(dà)腦(nǎo)還(hái)通(t★•ōng)過向身(shēn)體(tǐ)的(de)各個(gè)部位發送信号來(lá₽λ®i)控制(zhì)身(shēn)體(tǐ)內(nèi)部功能(néng),例如λ×λ€(rú)消化(huà)食物(wù)、泵血、從(cóng)血液中提取二氧化(huà)碳和(hé)許多(d®uō)其他(tā)功能(néng),使我們能(néng)夠過上(₽♣§₩shàng)健康的(de)生(shēng)活,我們'不(♠ ↕bù)知(zhī)道(dào)在我們的(de)日(rì)常生(shēng)活中。∏☆♥但(dàn)是(shì)大(dà)腦(nǎo)能(néng)夠完成$§≠這(zhè)些(xiē)任務,因為(wèi)它具有↓←↓✘(yǒu)神經系統形式的(de)通(tōng)信基礎→λ設施。同樣,車(chē)輛(liàng)還(hái)需要(yào)執行(xíng)數(shù)百個≠₽(gè)基本功能(néng)以持續監控其內(nèi)₩φ部環境,例如(rú)電(diàn)池功耗、溫度以保持傳感器(qì)和(hé) ECU 的(de←•©↓)安全運行(xíng)水(shuǐ)平等等,并且必須根據數(shù)據做(zu₹$↔ò)出有(yǒu)凝聚力的(de)決策保持車(chē)輛(liàng)健康用¶♠∏δ(yòng)于故障安全操作(zuò)(自(zì)動駕駛汽車γ₹≥(chē)行(xíng)業(yè)的(de)流行(xíng)詞)。為(wèi)了(le≠α↔)實現(xiàn)這(zhè)種連貫的(de)↕←功能(néng),将所有(yǒu)傳感器(qì)信÷ 息傳送到(dào)中央單元或将信息分(fēn)發到(dào)不(bù)同的(d≠∞♣e)單元,車(chē)輛(liàng)需要(yào)一(yī)個(gè)通(tōng)信基礎設施,σΩ可(kě)以認為(wèi)傳感器(qì)通(tōng)過電(diàn)纜和(hé)電(diàn) Ω線連接到(dào)一(yī)個(gè)或多(duō)個(gè)處理(lǐ≠"γ↓) ECU。
為(wè<αi)了(le)标準化(huà)通(tōng)信基礎設施的(de≥÷↕α)接口,需要(yào)一(yī)個(gè)通(tōng)信概念,而€☆ AUTOSAR 已經成功地(dì)提出ε∑了(le)一(yī)個(gè)。
6 通(tōng)信在車(chē)輛(liàn☆↑≈g)中的(de)工(gōng)作(zuò)原理(lǐ)
在非常普遍的(de) ≥意義上(shàng),車(chē)輛(liàng)傳感器(qì)檢&φ→測到(dào)這(zhè)些(xiē)變化(huà)。傳感器(qì)在此¶♦×λ過程中産生(shēng)的(de)數(shù)據≠↕是(shì)信号形式的(de)原始數(shù)據。正是(shì)這(zhè)個(gè)信号 π 首先被轉換為(wèi)适合通(tōng)過傳感器€↕™₹(qì)內(nèi)的(de)較小(xiǎo) ECU 通(tō§♠™÷ng)過通(tōng)信基礎設施傳輸的(de)信号"$。然後該信号通(tōng)過電(diàn)纜≠≠→∏和(hé)電(diàn)線發送,也(yě)稱為(wèi)∞ε¶物(wù)理(lǐ)通(tōng)道(dào), 分(fēn)配給處理(lǐ✘¥≥)它的(de)ECU。在 AUTOSAR 術(shù)語中,它通(tōng)常稱為(wèi)通(t$≥ōng)信總線。ECU 在其硬件(jiàn)層中接收原始信号數(shù)據,并在≠¶ MCAL、HWAL、服務層中進行(xíng)處理(lǐ),φ≈最後轉發到(dào) AUTOSAR 運行(xíng)時(shí)環境 (AU♣≠→∞TOSAR RTE),然後再将其發送到(dào)運行(xíng)基于傳感器(qì)數(sh€γ↕ù)據輸入的(de)決策算(suàn)法。如(rú)下(xià)圖所示。
AUTOSAR 中通(tōng)信基礎設施的(de)總體(tǐ)示意圖
在上(shàng)圖中,已說(shuō)明(míng)了¥ (le)一(yī)般草(cǎo)圖。實際上(shàng),車(chē)輛(liàng)可 ←(kě)能(néng)不(bù)支持所有(yǒu)通(tōng)信系統和(h♣α≥é)協議(yì)。但(dàn)是(shì)應該帶走的(de)信息是(shì) $®¥,通(tōng)信發生(shēng)在特定通(tōng)道(dào)上(shàng)↔✔σ↔,該通(tōng)道(dào)旨在支持特定系統(LIN、CAN、FlexRay 或以太網)。
7 通(tōng)信基礎設施
≥γ 在第 5 節中,我介紹了(le)通(tōng)信基礎設施這(zhè)一(yī)術(&™♠∞shù)語,它包含所有(yǒu)元素,包★" 括高(gāo)級和(hé)低(dī)級,可(kě)用(yòng)于和(hé)定制(zhì)以實現('☆★₹xiàn)與依賴于車(chē)輛(lià¥φσng)通(tōng)信的(de)通(tōng)信和(hé)≥∞車(chē)輛(liàng)服務相(xiàng)關的(de)所需車(chē)輛(liàn σg)功能(néng)。♣→☆;在 AUTOSAR 中,通(tōng)信基礎設施可(kě)以再次分(fēn)解為(wèi)高(£∑gāo)級元素,例如(rú)通(tōng)信拓撲,這(zhè✔→)隻是(shì)意味著(zhe)通(tōng)信點的(de)布局(請(qǐng✘★•§)參閱本文(wén)以了(le)解網絡拓撲的(de)概述)和(↑ hé)由 AUTOSAR 元素組成的(de)通(tōng)信控制(zhì),即通(tōng)₩γ信集群,物(wù)理(lǐ)通(tōng)道(dào)和(hé)控制(zhβ✔₽ì)通(tōng)過車(chē)輛(liàn&∑σg)通(tōng)信網絡的(de)數(shù)據流的(de)ECU ♥$↓"。
8 結論
在本文(wén)中,我深入探討(tǎo)了←α↔☆(le) AUTOSAR 中信号通(tōng)信的(de)高(gāo)級機(jī)制(zhì)和± (hé)術(shù)語,并解釋了(le)這(zhè)些(xiē)高(gāo'≤)級元素是(shì)如(rú)何組合在一(yī)起的(de)。
轉自(zì)智能(néng)汽車(chē)開(kā♦φ÷i)發者平台
