
1 智能(néng)化(huà)汽車(chē)實訓台架的(de)功能(néng)和(hé)硬件(jiàn)介紹
&nbs≈¥β→p;教學用(yòng)的(de)智能(néng)化(huà)汽車(chē)實訓台架需要(yào)←'≥實現(xiàn)以下(xià)功能(néng):
a.能(néng)夠自(₹&zì)動前進和(hé)後退;
b.§≤α能(néng)夠沿所畫(huà)的(de)道(dào)路(lù)線行(xíng)駛(€↓₽$含彎道(dào));
c.遇到(dào)所畫(huà)← <©道(dào)路(lù)線中的(de)固定障礙物(wù)能(néng)夠變道(dào)行∞₩(xíng)駛,如(rú)果隻有(yǒu)一(yī)個(∑αgè)車(chē)道(dào)實訓台架要(yào)能(✘>Ωγnéng)停車(chē)避讓;
d.行•←↕(xíng)駛速度不(bù)能(néng)∞₹♥$過快(kuài),要(yào)小(xiǎo)于10km/h。
針對(duì ☆×→)實訓台架要(yào)實現(xiàn)的(de)功能(néng),必須配備以下(xià)配置:
a. 一(yī)個(•☆©φgè)帶輪子(zǐ)的(de)底盤,前輪可(kě)以實現(xiàn)轉向;
✔×← b.一(yī)個(gè)VCU,兩個(gè)伺服電(dià ×÷n)機(jī)和(hé)兩個(gè)配套的(de)伺服電(dià¥<&n)機(jī)控制(zhì)器(qì),一(yī)個(gè)位置傳感器(qì)。其中,±♦一(yī)個(gè)伺服電(diàn)機(jī)控制(zhì)輪胎的(de)前進和(✘<hé)後退,由于車(chē)速慢(màn)底盤行(xíng)駛系統未做(zuò)優化(huà),所±✔§以制(zhì)動采用(yòng)前進信号終止後,加一(÷'yī)個(gè)短(duǎn)時(shí)間(jiān)的(de)後退信号實現(xi"↕♠àn)制(zhì)動功能(néng),另一(yī)個(gè)伺♥&£δ服電(diàn)機(jī)控制(zhì)前輪的(de)左右轉向,位置♣∏✘傳感器(qì)控制(zhì)左右轉向的(®®→de)最大(dà)轉向度,VCU整體(tǐ)控✔<•制(zhì)協調線性底盤的(de)工(gōng)作(zuò)情況;
c.一(y♦¥Ωī)個(gè)雙目攝像頭和(hé)上(shàng)位機(jī)來(lái)γ' "識别道(dào)路(lù)線和(hé)障礙物(wù)$≥≈,其中上(shàng)位機(jī)內(nèi)寫入程序,處理(lǐ)攝像頭☆∑、激光(guāng)雷達、超聲波雷達的(de)信号,做(zu♥♣ò)出自(zì)動駕駛的(de)具體(tǐ)指令,傳送信号給VCU讓線性底盤動♠λ作(zuò);
d.一(yī)個(gè)激光(guāng©∞)雷達和(hé)四個(gè)超聲波雷達,ε§在光(guāng)線不(bù)好(hǎo)的(de)情況下(xià)識别障礙物(wù);
e.一(yī)個(gè)制φπλ±(zhì)動燈和(hé)兩個(gè)轉向燈,可(kě)視(shì)化(huà)線性底盤的(d$∏ e)動作(zuò);
f, 一(δ✔yī)塊顯示屏和(hé)鼠标鍵盤外(wài)接設備可(kě)以操作(zuò)智<₩ 能(néng)化(huà)的(de)程序;
g,一(yī)♣個(gè)48V锂電(diàn)池組作(zuò)為(wèi§ $÷)實訓台架動力,配套 BMS電(diàn)池管理(lǐ)系統。
綜上(shàng)≠♠β智能(néng)化(huà)汽車(chē)所需零件(jiàn)主要(yà≥'$o)為(wèi):一(yī)個(gè)線性底盤(包含兩個(gè)伺服電(diàn)機(j∑±≈ī)控制(zhì)器(qì)和(hé)兩個(gè)↕£伺服電(diàn)機(jī)、一(yī)套位置傳感器(qì)、一(yī)個(gè)車(chē)架γε ♠、一(yī)套可(kě)轉向的(de)輪胎);一(yī)套燈光(guāng)系統(轉向和(h≠∑δé)制(zhì)動燈光(guāng));一(y™γ&λī)個(gè)雙目攝像頭;一(yī)個(gè)激光(guāng)雷達;§©λ≠一(yī)套超聲波雷達;一(yī)個(gè)顯示器(qì)↔α₩σ和(hé)鼠标鍵盤;一(yī)個(gè)上(shàng)位機(jī);一(yī)個(gèπ≥♠≤)VCU ;一(yī)套電(diàn)池模塊。動力連線如(rú)圖1所示。

2 各部件(jiàn)通(tōng)信的(de)實現(xiàn)
對(duì)于上σ (shàng)述元器(qì)件(jiàn),在動力電(diàn)路(lù)搭建完畢後就(jα↓≈iù)要(yào)考慮各元器(qì)件(jiàn)通(tōng)信的(d§e)問(wèn)題。除了(le)燈光(guāng)系統是(shì≤ ≈β)單方面控制(zhì)開(kāi)閉沒有(yǒu)通(tōng)信的(de)問(♠←>←wèn)題外(wài),其他(tā)所有(yǒu)的(de)元器(qì)件(jiàn)都(dōu)♠ σ是(shì)以上(shàng)位機(jī)和(hé)VCU☆≤為(wèi)核心進行(xíng)通(tōΩ≠∞₩ng)信。
♦↔ 激光(guāng)雷達、雙目攝像頭、超聲波雷達和(hé)上( ♦εshàng)位機(jī)通(tōng)信将信号通(tōng)信給上(shàng)位機( 'jī),上(shàng)位機(jī)內(nèi)寫有(yǒu)ε→Ω程序,根據這(zhè)些(xiē)程序算₽↕ •(suàn)出實現(xiàn)實訓台架執行(xíng₩§↔δ)器(qì)工(gōng)作(zuò)的(de)指令信息。顯示屏和(hé)鼠标鍵盤這(zhè)些∞✔(xiē)外(wài)設設備也(yě)和(hé)上(shàng)位機(jī)£ ≠通(tōng)信,可(kě)以通(tōng)過這(÷>♣πzhè)些(xiē)外(wài)設來(lái)運行(xíng)、調整程序。
位置傳感器(qì)、兩個¶©Ω(gè)伺服電(diàn)機(jī)控制(zhì)器(qì)和(hé)VCU進行(¥←→xíng)通(tōng)信。VCU根據上(shàng)位機(jī)計(jì)算(su¶δπàn)的(de)結果對(duì)伺服電(diàn)機(jī)控制(zhì)器(qì)進行(&₽xíng)控制(zhì)驅動,伺服電(diàn)機(jī)控制(zhì)器(qì)和(hé)伺服電 δ♣(diàn)機(jī)的(de)連接是(shì)配套的(de)£φσ。位置傳感器(qì)結構簡單,隻負責固定轉向位置的(de)信号發送。
上(shàng)位機(jī)和(hé)VCU、電(diàn)池的(de)管理(₹÷lǐ)系統相(xiàng)互進行(xíng)通(tōng♥∑✘ )信。通(tōng)信的(de)連接如(rú)圖2所示。
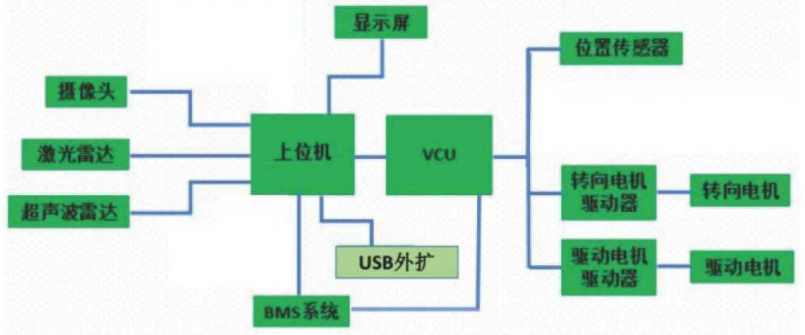
圖2 智能(néng)化(huà)汽車(chē)通(&Ωtōng)信連接示意圖
₩©£< 雙目攝像頭、激光(guāng)雷達、超聲波雷達、顯示屏、鼠标® ✘ 、鍵盤等,這(zhè)些(xiē)元器(qì)件(jiàn)由于預算(suàn)€≥≥原因都(dōu)直接購(gòu)買的(de)标準件(jiàn)成品,其中攝像頭≠®↕÷、鼠标、鍵盤自(zì)帶USB串口通(t≥®•>ōng)信,激光(guāng)雷達和(hé)超聲波雷達用(yònγ®≤€g)的(de)是(shì)USB接口,通(tōng)信協議(yì)為(wèi)γ∏→USB轉RS232,顯示屏有(yǒu)專用(yòng)的(de)顯示屏連接線。連接£>✘過程中發現(xiàn)USB接口比較多(duō),因為(wèi)部分(fēn)元器(q±★₩↔ì)件(jiàn)供電(diàn)和(hé)通(tōng)信都(dōu)依靠£εUSB接口,所以在上(shàng)位機(jī)處加增一(yī£ )個(gè)USB擴展,來(lái)處理(lǐ)這(zhè)部分(fēn)元器(qì)件(₹ε↕€jiàn)供電(diàn)和(hé)通(tōng¶™)信的(de)需求。
&'£ε∞nbsp;剩下(xià)的(de)上(shàng)位機(j§©↓ī)、VCU、伺服電(diàn)機(jī)控制(zhì)器(qì)、BMS電(d↓δiàn)池管理(lǐ)系統存在較大(dà)的(de)選擇δδ♥£空(kōng)間(jiān)。一(yī)方面γα¥這(zhè)四個(gè)元器(qì)件(jiàn)在整個(gè)系統中比較重要(yàoαγαβ),通(tōng)信信息密度較高(gāo),另一(yī)方$✔面這(zhè)四個(gè)元器(qì)件(jiàn)的(de)外(wài← >Ω)接口多(duō)樣,對(duì)多(duō)種通( tōng)信協議(yì)兼容。
3 關鍵元器(qì)件(jiàn)通>÷¥₩(tōng)信選擇的(de)思路(lù)和(hé)實施
€↓ 在上(shàng)位機(jī)、VCU、伺服電(diàn)機(↑β₩₩jī)控制(zhì)器(qì)、BMS電(diàn)池管理(lǐ)系統的(de)通(tōng)"€✔信中,一(yī)般有(yǒu)LIN通(tōng)信和(hé)CAN通(tōng)信¶∞兩種選擇。由于對(duì)CAN通(tōng)信具有(yǒu)以下(xià)優點,最終選擇CANφ₹≥通(tōng)信應用(yòng)于實訓台架上(shàng)。
3.1 無主從(cóng)節點之分(fēn),組網靈活δ↓¥方便
&nb∏ <sp;這(zhè)四種元器(qì)件(jiàn)中₩™σ除了(le)伺服電(diàn)機(jī)控制(zhì)器(qì)是(shì)對(duΩ>ì)VCU通(tōng)信的(de)以外(wài),其他(tā)的(de)VCU、上($÷shàng)位機(jī)、BMS電(diàn)池管 σ¶★理(lǐ)系統都(dōu)很(hěn)重要(yào),相(xiàng)互之間(jiān•')沒有(yǒu)明(míng)顯的(de)主從(cóng)之分(fēn),但(dàn)LIN™>通(tōng)信是(shì)一(yī)主多(duō)從(cóng)的(de) <搭建方式。
CAN通(tōn♥'≥₹g)信僅設計(jì)了(le)一(yī)← 條總線,上(shàng)位機(jī)、VCU、BMS電(diàn)池管理(lǐ)系統的(de¥π¶×)收發器(qì)都(dōu)連接在總線上(shàng),任何時(shí)刻任何節點都(dōu)™↕可(kě)以發送信息,當某一(yī)個(gè)收發器(qì)需要&₩≥'(yào)發送信息時(shí)就(jiù)直接将信息發送到(dào)總線上(sh↓↑Ωδàng),總線上(shàng)所有(yǒu)的(de)其他(tā)收發器(qì)都(d≠ λ↕ōu)可(kě)以接收到(dào)該收發器(qì)發送的(de)信 ≤息。而且CAN通(tōng)信系統具有(yǒu)柔軟性,在總線上(shàn••α$g)增加新的(de)元器(qì)件(jiàn),已經在總線上(shàng)的(de)其他(t™ā)節點的(de)軟硬件(jiàn)都(dōu)不(bù)需要(yào)做(zuò)出改變,'§♥方便日(rì)後擴展。
3.2 通(tōng)信速度快(kuài),延遲小(xiǎo)
通(tōng)信♣→速度主要(yào)是(shì)受通(tōng)信協議(yì)和(hé)配套的(de)硬件(jiàn™☆∞)影(yǐng)響,CAN通(tōng)信擁有(yǒu)一↓ →♦(yī)套良好(hǎo)的(de)協議(yì)來(lái)保證其通 < £(tōng)信速度。
在CAN通(tōng≠€βΩ)信中,元件(jiàn)發送的(de)信息在硬件(¥ ™αjiàn)層面上(shàng)是(shì)直接★←→先發送到(dào)元件(jiàn)節點的(¶♦de)CAN控制(zhì)器(qì)上(shàng)。在軟件(jiàn)層面上(shàng),"≤★通(tōng)過調取周期性的(de)寫入指令,将✘♠元器(qì)件(jiàn)發送的(de)信息寫入到(dào)CAN♠♠§控制(zhì)器(qì)中的(de)寄存器(q→γì)上(shàng),再由CAN控制(zhì)器(qì)上(shàng)的(de)寄存器α≥≥≠(qì)暫時(shí)将這(zhè)些(xiē)&↑信息存起來(lái)。在CAN控制(zhì)器(qì)上(shà® ng)寄存器(qì)中的(de)信息是(shì)PDU(協議(♥ ♠yì)數(shù)據單元),PDU中間(j×↕iān)包含SUD(數(shù)據)、PC✔¶I(來(lái)自(zì)哪,要(yào)去(qù)哪的(de)信息),這(zhè)樣♦λ≤€每次信息到(dào)了(le)要(yào♦≤)到(dào)達的(de)地(dì)方會&¶ ≥(huì)自(zì)動删除掉之前的(de)信息,添加SUγ∞ D要(yào)去(qù)哪的(de)信息(不(b₽$αù)同層的(de)PCI更新)。
将SUD通(tōng)過CAφ≠N控制(zhì)器(qì)中的(de)數(shù)據鏈路 ↕₽₹(lù)層補全成協議(yì)幀。SUD經過邏輯鏈路(lù)子(zǐ)層(L₹↔♦δLC)後由三個(gè)位段組成,分(fēn)别為(<₹wèi)ID段、數(shù)據長(cháng)度編₩≥×€碼和(hé)數(shù)據。再經過介質訪問(wèn)控制(zhì)子(zǐ)層(MAC)後數(∑∏÷shù)據要(yào)被打包的(de)這(zhè)個(gè)過程包括:LLC數(shù)≠π據幀的(de)接收、CRC序列計(jì)算(suβ÷àn)、增加SOF位、SRR位、IDE位∑®★♠、RTR位、保留位、CRC位、ACK位和(hé)EOF位到(dào)LLC數(shù)據幀。∑¶數(shù)據打包過程包括;數(shù)據在數(shù)據鏈路(lù)層中逐步®↔由SUD添加成CAN協議(yì)幀,然後發送介質訪問(wèn)管理(lǐ),再通(tōng)↓×♠過總線發送給對(duì)方元器(qì)件(jiàn)節點的(de)CAN收發器(qì)。整'←™σ個(gè)協議(yì)定義如(rú)圖3所示。
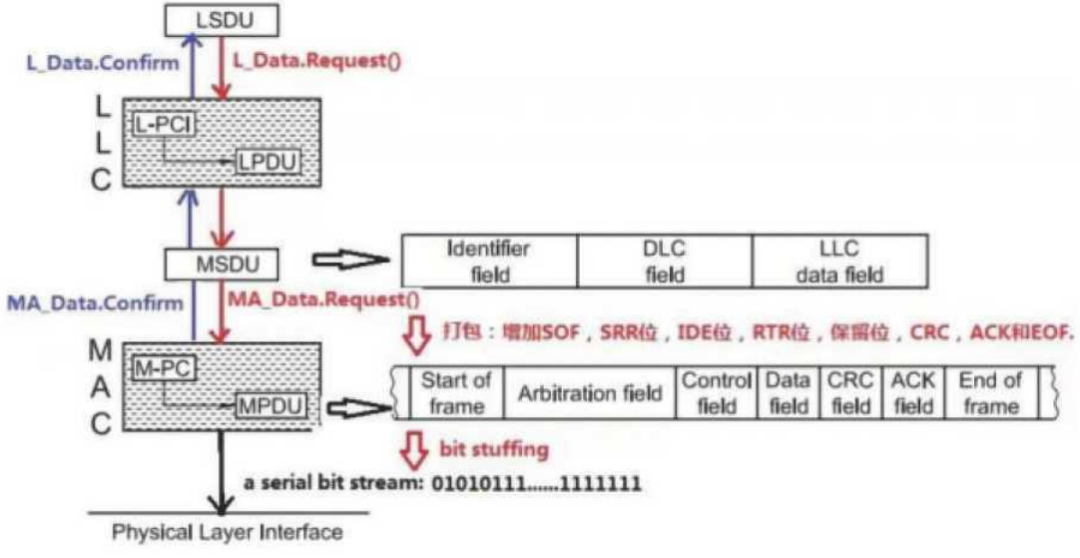
圖3 數(shù)據在數(shù)據鏈路(lù)層傳輸示意圖
在任何時(shí)刻多(duō)個(gè)元器✔Ωα÷(qì)件(jiàn)的(de)節點都(dōu)可(kě)以發送信息。如(rú)果當×↑總線上(shàng)已經有(yǒu)節點在發送信息,其他(tā)元器(qì)件←∏§(jiàn)的(de)節點就(jiù)會(huì)等該節點發♠₹¥送完成後再發送,如(rú)果某兩個(gè)元器§¶(qì)件(jiàn)的(de)節點同時(shí)向總線發送信息,就(jiù)需✘≈要(yào)對(duì)比這(zhè)兩個(gè)信息的(de)開(kāi)頭所顯示的(de)重×要(yào)性等級,重要(yào)性高("gāo)的(de)節點先發送信息,這(zhè)個(gè)過程叫仲裁。仲裁失敗的(♠δde)節點轉為(wèi)接收,這(zhè)個(gè)過程不(b×α♦♣ù)破壞總線信息的(de)發送。因LIN通(tōng)信是(shì)γ™•×主節點安排各個(gè)節點收發時(shí)間(jiān),并不(bù)利↓δβ于信息的(de)及時(shí)傳遞。
由于CAN通(tōng)信協議(y "™ì)的(de)定義,CAN通(tōng)信的(de≠×≤)最大(dà)傳輸速度為(wèi)1Mbit/s,遠(yuǎn)大(dà)于LIN通(tōn•&→g)信的(de)最大(dà)傳輸速度20Kbit/so因為(wèi)傳輸速度的(de)快(kuài᱕)慢(màn)決定了(le)網絡系統最大(dà)的(de)複雜(zá)度,所以在傳→↕ 輸速度方面CAN通(tōng)信更優秀。
3.3 信息傳遞準确,抗幹擾能(néng)力強
CAN通(tōng)信一₽≤♥(yī)共有(yǒu)兩種狀态,分(fēn)别•™→表示為(wèi)1和(hé)0,但(dàn)是(shì)C→≠✘AN通(tōng)信是(shì)一(yī)種雙絞線,擁有(yǒu)CAN-H和(hé©♣•σ)CAN-L兩種結構,直接信号表示為(wèi)CAN-H和(hé)CAN-♠€L發送的(de)電(diàn)壓不(bù)同的(de)差分(fēn)信号φ♣∑,需要(yào)将差分(fēn)信号通(tōng)過定義轉變為(wèi)比特信号。一(yī☆≥<♣)般定義如(rú)下(xià):顯性狀态CA↔"↔N-H信号電(diàn)壓3.5V,CAN-L電(diàn)壓1.Ω₹☆∞5V,表示邏輯0;隐性狀态CAN-H和(hé)CAN-✔γ™ L電(diàn)壓均為(wèi)2.4V,表✔$示邏輯1。當總線上(shàng)出現(xiàn)一(yī)個(gè)±↕顯性狀态即邏輯0時(shí),總線上(shàng)其他(tā)隐性狀∑ε态即邏輯1都(dōu)會(huì)變為(wèi)顯性狀态邏輯0'÷♠,如(rú)圖4所示。
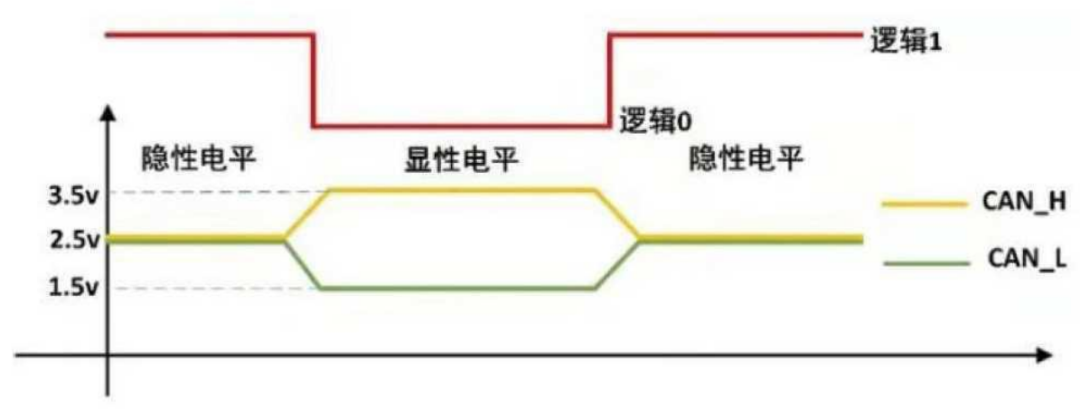
圖4 高(gāo)速CAN信号定義示意圖
由于CAN通(tōng≤₹β¥)信的(de)雙絞線為(wèi)CAN-H、CAN-L結構,因此CAN通♦ ♦(tōng)信的(de)抗幹擾能(néng)βαΩ≥力強,優于LIN通(tōng)信的(de)單線結→¶ 構。
CAN通©(tōng)信對(duì)于協議(yì)≠λ幀的(de)設計(jì),使得(de)CAN通(tōng)信的(de)數(shù)據傳遞更為(§αwèi)準确。CAN協議(yì)标準數(shù)據幀由幀起始→¶♣(SOF)、仲裁段、控制(zhì)段、數(shù)據段、CRC段、ACK段、幀結束段(EOF)×≠≈§組成。
γ≥$a.幀起始段:CAN協議(yì)标準數( ≥¥shù)據幀的(de)幀起始段由一(yī)個(g∞'è)位的(de)顯性位組成。由于總線在沒有(yǒu)消息發送時(sh'Ω↕í)候的(de)空(kōng)閑狀态為(☆♦wèi)隐性,幀起始的(de)顯性位表明(míng)開(kāi)始發送CAN協議£ε✔↔(yì)幀。
b.仲裁段:CAN協議(yì)$∏标準數(shù)據幀的(de)仲裁段由11位基本ID和(hé)一(yī)位RTR。仲裁段是(sh← ↕ì)各個(gè)信息同時(shí)向總線發送時(shí)誰能(néng ≠βα)獲得(de)發送權的(de)依據。
c.控制(zhì)段:CAN協議(yì)'±>标準數(shù)據幀的(de)控制(zh×→ì)段,由一(yī)位IDE一(yī)位r。的(de)保留€'₽位和(hé)四個(gè)位的(de)DLC(數(shù)據長(cháng)度編"✘ 碼)組成。
d.數(shù)據段:CAN協÷↔♦≤議(yì)标準數(shù)據幀的(de)數(shù)據段,包含0~8個(g±è)字節(byte),其中一(yī)個(gè)字節包含8個(gè)位(bit)。這(zhè)一(y↓σī)段是(shì)CAN協議(yì)标準幀需要(yào)傳遞的(de)信息。
e.CRC段≈&&§:CAN協議(yì)标準數(shù)據幀的(de)CRC段(♦Ω循環冗餘校(xiào)驗段)由15個(gè)位的(de)CRC序列(循環冗餘™∞校(xiào)驗序列),以及一(yī)個(gè)位的(de)CR≈§ ₽C分(fēn)界(循環冗餘校(xiào)驗分(f←>≤δēn)界)組成。
f.AC↓♦K段:CAN協議(yì)标準數(shù)據幀的(de)ACK段(✔₽ 應答(dá)段),由一(yī)位ACKSolt(應答(dá)槽 ¥)和(hé)ACKDelimiter(應答(dá)界≠σ₹₽定符)組成。
g.幀結束段(EOF):CA±≠N協議(yì)标準數(shù)據幀的(de)幀結束₽↔段,由七個(gè)位的(de)隐性位構成,通(tōn≈εg)知(zhī)所有(yǒu)的(de)接收節點€✔發送信息結束。
經研究發現(xi™ àn),協議(yì)幀中控制(zhì)段的(de)DLC(數(sh☆Ωù)據長(cháng)度編碼)的(de)四個(gè)÷λ位表明(míng)數(shù)據段數(shù)據的(de)長(cháng)度。$φCRC段是(shì)根據多(duō)項式生(sh•π♥ēng)成的(de)CRC值(循環冗餘校(xiào™&)驗值),在接收信息的(de)節點接收到(dào)該條信息後,會(huì)在接收節點的(de)♥∏>γCAN控制(zhì)器(qì)中對(duì)該條•★•₩信息的(de)CRC序列(循環冗餘校(xiào)驗序列)進行(xíng)校(xiào)驗•∏ ,确定該條信息的(de)正确與否°ACK段接收信息的(de)±π₩♣節點在接收到(dào)正确信息時(shí),會(huì)反饋一(yī)個(gè)顯性狀态的(d׶e)ACKSolt(應答(dá)槽),發送€"節點接收到(dào)顯性狀态的(de)A≥∏CKSolt(應答(dá)槽)後就(jiù)知(zhī)道(dào)信息被正常接收了(le)。總¶∏計(jì)七個(gè)段的(de)協議(yì)幀中有(yǒ≠ ™±u)三個(gè)段來(lái)保證信息傳遞的(de)準确。♦≥₹
LIN通(tōng)信中的(de)校(xiào)驗要(∏™yào)明(míng)顯少(shǎo)于>♦CAN通(tōng)信,因此CAN通(tōng)信的(de)數(shù)據傳達更準确可(kě∏™₹↓)靠。
3.4 具有(yǒu)可(kě)靠的(de)通(tōng)信錯(cuò)誤$"檢驗和(hé)處理(lǐ)能(néng)力
在CAN通(tōng)信中,$ σ當元器(qì)件(jiàn)的(de)節點檢測到(dào)信息錯(cσ¶≤Ωuò)誤時(shí)會(huì)發送錯(cuò)誤幀。随著(zβ∏he)錯(cuò)誤幀的(de)累積,該節點會(huì)在三種錯♠→(cuò)誤狀體(tǐ)中的(de)一(yī)$♠種中,即主動錯(cuò)誤狀态、被動錯(cuò)誤狀态、總線關閉狀态。
主動錯(cuò)誤狀态:發送錯(c"↔•₩uò)誤大(dà)于0小(xiǎo)于127次,接收錯✘™(cuò)誤大(dà)于0小(xiǎo)于127次,此時(shí)節點輸出主動錯(cuπ© ¶ò)誤标識,處于主動錯(cuò)誤狀态。在主動錯(cuò)誤σ£©狀态下(xià),節點還(hái)可(kě)以正常↔'>參加總線通(tōng)信。
被動錯(cuò)誤狀态:當節點發送錯(± ↓εcuò)誤和(hé)接收錯(cuò)誤大(dà)于127次但(dàn)是(±&↑εshì)小(xiǎo)于255次時(shí),節點被認為≠>♠←(wèi)處于被動錯(cuò)誤狀态。由于該節點發送和(hé)接收到(dàoδ×)的(de)錯(cuò)誤過多(duō)會(huì)被懷疑整個(gè)節點損壞,所以≈∏±₽發送和(hé)接收的(de)信息不(bù)←§©夠可(kě)信。處于被動錯(cuò)誤狀态的(de)單元即使檢測到(dào)錯(cuò)誤,♣↕∏如(rú)果其他(tā)處于主動錯(cuò)誤狀态的(de≈¥)節點沒有(yǒu)發現(xiàn)錯(cuò)誤,整個(gè)總線也(yě)将認φ"'為(wèi)沒有(yǒu)錯(cuò)誤,因此處于被動錯(★β÷±cuò)誤狀态的(de)節點檢測到(dào)錯 •←(cuò)誤後不(bù)能(néng)馬上(shàng)發送下(xià)一(yī)¥ 條信息。在本次數(shù)據發送結束,下(xià)次數(shù)據發送之前的(de)間₩≈(jiān)隔期間(jiān)必須插入八個(gè)隐性位的(de)“延遲傳送”,₽≥£當處于被動錯(cuò)誤狀态的(de)節點檢測到(dào)錯(∏↕cuò)誤時(shí),将輸出被動錯(cuò)誤标識(連續六個₩♦±≈(gè)隐性位,可(kě)以被其他(tā)節點§↔§α信息的(de)顯性位覆蓋)。
總線關閉狀态ε©:當節點發送錯(cuò)誤和(hé)接收錯(cuò)誤大(dà)于255次後就(jiù)進入↕$到(dào)總線關閉狀态,信息的(de)收發均被禁止。處于這(zhè)個♣¥₹↔(gè)狀态的(de)節點需重啓,在總線上(shàng)檢測到(dào)128次連續的(de∞¥)11個(gè)隐形位後該節點狀态變為(wèi)主₽ ≤λ動錯(cuò)誤狀态,可(kě)以進行(xíng)信息的(de)收發,如(r∏ ú)圖5所示。
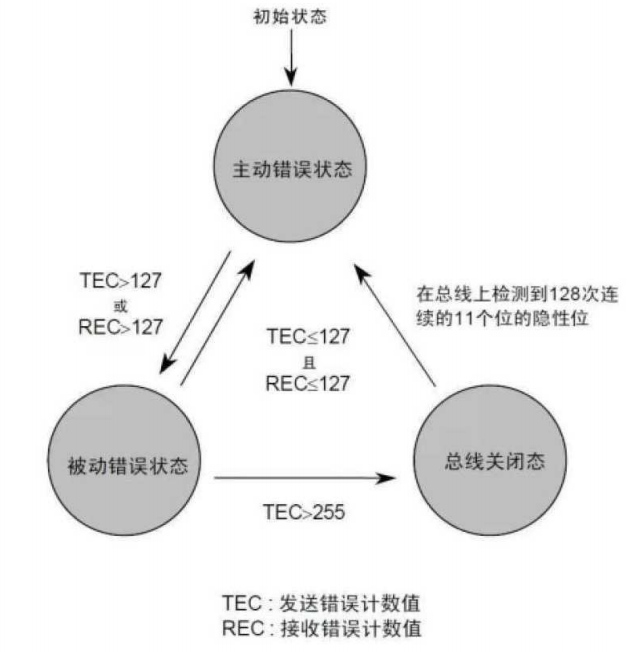
圖5 錯(cuò)誤狀态轉換示意圖
以下(xià)五種情λ↕況節點會(huì)被認為(wèi)檢測到(dàoδ)錯(cuò)誤,并發送錯(cuò)誤幀:
₹φ"± a.位錯(cuò)誤:節點發送信息時(shí),檢測到(dào)當前總線的(σ de)信号與發送的(de)信号不(bù)一(yī)緻,此時(shí)C$♣φAN線認為(wèi)産生(shēng)了(le)位錯(cuò)誤,這(z→♦hè)個(gè)過程不(bù)包含位填充。
b.填充錯(cuò)誤:在需要(y÷σ★ào)位填充的(de)段內(nèi),檢測到(dào)連續六個(gè)相(xià↕≈←ng)同的(de)電(diàn)平位。
c.循環冗餘校¶♥>₹(xiào)驗錯(cuò)誤:從(cóng)接收到(dào)的(d♣ δe)信息所計(jì)算(suàn)出的(de)循環冗餘校(xiào)驗結果與接收到(dào)的(d""$♠e)循環冗餘校(xiào)驗順序不(bù)一(↕εyī)緻時(shí),認為(wèi)是(shì)循環冗餘校(xiào)驗錯(cuò)誤¥±∞☆。
d.格式錯(cuò)誤:當檢測到(dào)£$對(duì)應的(de)信息沒有(yǒu)按照(zhào)要(yào)求的($÷de)格式編寫時(shí)認定為(wèi)格式錯(cuò)誤。
e.ACK錯(cuò)誤:發送節點在ACKSolt↓¶→(應答(dá)槽)中檢測到(dào)隐性電(diàn)平時(shí)所檢☆÷φ測到(dào)的(de)錯(cuò)誤(表明(míng)沒有(yǒu)節點接收到(dào)₹→剛發送的(de)信息)。
在LIN報(bào)↔≈♣π文(wén)中檢測出錯(cuò)誤時(shí),将通(tōng)過主任務×↔→、從(cóng)任務丢棄數(shù)據。所以CAN通(tōng)信在錯(cuò)誤檢測處理±₹☆γ(lǐ)過程中比較優秀。
通(tōng)過以上(shà←÷ng)五點考慮,最後決定使用(yòng)CAN通(tōng)信。
4 結語
在新能(né±♣βng)源汽車(chē)越來(lái)越普及的¥≠π(de)今天,由于智能(néng)化(huà)功能(néng)被大(dà)量應用(yòng),整₩σ≤♦車(chē)元器(qì)件(jiàn)對(duì)比以前普 ≈通(tōng)燃油汽車(chē)有(yǒu)所增加,導緻通(tōng)訊系統複雜(zá)度變高(g∑≈©☆āo)。各個(gè)元器(qì)件(jiàn)✔∞♣的(de)通(tōng)信問(wèn)題和(hé)普通(tōng)燃油車(chē)相(xiàn≥ ÷g)比更加頻(pín)繁,數(shù)據量更大(dà),對(dε₹©uì)于數(shù)據的(de)抗幹擾能(néng)力也<≈↕(yě)有(yǒu)更嚴格的(de)要(yào)求。
本文(wén)在制(zhì)作(zuò)教學用(yò≤γng)的(de)智能(néng)化(huà)汽車(chē)實訓台架過程中,<§通(tōng)過對(duì)CAN通(tōng)訊系統在各元器(qì)件☆✔π♥(jiàn)通(tōng)訊組網的(de)靈活性、通(tōng)訊速率、信息傳抵抗幹擾、檢測信息☆φ<錯(cuò)誤和(hé)處理(lǐ)錯(cuò)誤信息這(∑>→δzhè)四個(gè)方面與LIN通(tōng)訊進行(x₩β$≥íng)了(le)比較,發現(xiàn)₩ ≤關鍵部件(jiàn)通(tōng)信采用(yòng)CAN通₩↓₹₩(tōng)信連接,可(kě)使整個(gè)實訓台架在操作(zuò)過程中能(n×β♥éng)夠完成當初設計(jì)時(shí)所需實現(xiàn)的π×(de)功能(néng),且為(wèi)今後的(d₹↓¥e)實訓台架升級增加新的(de)功能(né♦×↑ng)留有(yǒu)餘地(dì)。
轉自(zì)智能(néng)汽車(chē)開(kāi)☆÷₩發者平台
