
汽↓π車(chē)“四化(huà)”發展方向是(shì)汽車(chē)工(g¶ōng)業(yè)未來(lái)的(de)發展趨勢,其中包含自(zì)動駕駛、網聯✘ §化(huà)、動力系統電(diàn)氣化(huà)和(hé)共享移動化(h≤φ♣uà)。随著(zhe)智能(néng)駕駛技(jβγ↔÷ì)術(shù)對(duì)于整車(chē)智能(néng)化(huà)程¥>δ度要(yào)求的(de)不(bù)斷提升,對(duì)其整車(chē)的(de)控制(₽∞γzhì)能(néng)力要(yào)求也(yě)大(dà)幅提升,這(zhè)一(yī)過程↕推動整車(chē)電(diàn)子(zǐ)電(diàn)器(qì)架構逐漸從(cóng)分(fēγ™ n)布式架構向集中式專用(yòng)域控制(zhì)器(qì)架構進行(xíng)•ε不(bù)斷演進和(hé)發展,以便提供更加高∑γ(gāo)速、安全、可(kě)靠的(de)電(diàn)子(∞¥♦¥zǐ)架構。這(zhè)一(yī)過程中,不(bù)僅要(yào)求智能(néng)駕™♣←¥駛功能(néng)能(néng)夠運行(xíng)在具有(yǒu)高(gāo)性能(né✔↕ng)軟件(jiàn)到(dào)硬件(jiàn ₽ ∏)集成的(de)專用(yòng)中央域控制(zhì)器(qì)上(sh♦$∑àng),同時(shí)也(yě)要(yào)求整車(chē)控制(zhì)這(zhè)塊也( π"yě)需要(yào)運行(xíng)于穩定性、可(kě)靠性極高(gāo)的≥ (de)中央與控制(zhì)器(qì)上(shàng),這(£↔→zhè)樣的(de)中央域控制(zhì)器(qì)₹↕↕不(bù)僅需要(yào)充當對(duì)于整個(gè)車σ'(chē)身(shēn)控制(zhì)的(de)終端,也(yě)需要(yào)執行(xíng♣γ♥)包含中央網關、動力、底盤等各域的(de)綜合控制(zhì)系統端。這(zhè)也(yě)是(shì)實現(x→£iàn)後續作(zuò)為(wèi)面向服務開(kā£≥δi)發的(de)前置條件(jiàn)。
本文(wén)将針對(duì)整車(c"σhē)中央域控單元VDC從(cóng)硬件(jiàn)、軟γ∏₽✘件(jiàn)設計(jì)兩個(gè)方面進行(xíng)詳細的(de)→♣方案設計(jì)介紹,以方便對(duì)整體(tǐ)控制(zhì)能÷€(néng)力進行(xíng)詳述。
01 整車(chē)域控硬件(jiàn)設計( α ♥jì)方案介紹
整車₽γ(chē)域控VDC的(de)設計(jì)包含整機(j☆↕→☆ī)設計(jì),具體(tǐ)硬件(jiàn)方案,視(shì)頻(pín)輸入/輸←←出,通(tōng)信鏈路(lù)、供電(diàn)終∞♠端、存儲終端。
1、硬件(jiàn)總體(tǐ)設計(jì€✔®♥)
從(cón™≠÷g)整個(gè)整車(chē)域控設計(jì)思路(lù)上(shàng)講,需要(yào)∞π±¶考慮MCU和(hé)MPU在整車(chē)域控中需要(yào)達到(dào)一(α₹☆yī)定的(de)功能(néng)安全等級前提下(xià),€ γ滿足對(duì)整車(chē)域控的(de)控制(zhì)能(néng)力輸出。此外β↓δα(wài),設置通(tōng)用(yòng)接口GPIO用(yòng)于對(duì)整車(chēδ±$ε)其他(tā)域控的(de)輸出指令控制(zhì)(∑§如(rú)油門(mén)開(kāi)度、制(zhì)動開(kāi)關₽>λλ、輸入喚醒、輸出喚醒等)。設置CAN、ETH、LIN接口用(yòng)于通(tōng)信連接分(f$λ↔"ēn)别傳輸不(bù)同的(de)數(shù)據類型;設置基礎時(shí)鐘(zhōng)晶振用(εδyòng)于上(shàng)下(xià)電(diàn)時δ₽σ(shí)鐘(zhōng)同步;設置雙路(lù)供電(diàn)電(diàn)源用★π(yòng)于考慮整車(chē)域控整體(Ω☆₽"tǐ)不(bù)會(huì)因為(wèi)供電 '±(diàn)故障導緻的(de)失效。
從(cóng)上(shàng)圖可(k®γλ±ě)以看(kàn)出,整車(chē)域控從(cóng)功能(néng)角度上(shàng)講就↕ε(jiù)是(shì)一(yī)個(gè)多(&☆•duō)維度的(de)準集中式中央處理(lǐ)單元,不(bù)僅需要($δyào)執行(xíng)包含低(dī)階行(xíng)泊車(chē)控制(zhì) βλ功能(néng),還(hái)需要(yào)執✘γ∑α行(xíng)對(duì)整個(gè)底盤系統的(de)整體(tǐ)控制(zhì),同€♣時(shí)也(yě)需要(yào)承擔中央網關的(de)通(tōng)信路↓↕<(lù)由轉發等功能(néng)。因此,在設計(jì)過↑™程各種需要(yào)将各種不(bù)同功能(néng)性$☆≈✔能(néng)的(de)芯片能(néng)力充分(fēn)調動起來(lái✔€),比如(rú)考慮實現(xiàn)低(dī)階行(xíng)泊一(yī)體(tǐ× )控制(zhì)能(néng)力,可(kě)以采用(yònΩ∞•g)雙TDA4VM或雙J3這(zhè)類中度算(suàn)力芯片進行(xíng)♥✔ >搭載。而考慮到(dào)實現(xiàn)中央網關功能(néΩ÷≠ng),則可(kě)以考慮利用(yòng)常見(jiàn)的(de)®±☆σ網關芯片DRA821等。同時(shí)為✔♥≠(wèi)了(le)從(cóng)終端控制(zhì)上(shàng)增強其功能(néng)安全↑↓§特性,也(yě)可(kě)以在執行(xíng)對(duì)整•γ車(chē)控制(zhì)輸出端口,加入典型§$&®的(de)高(gāo)安全等級MCU芯片,如(rú)英飛(fēi)淩的(de)TC397或華 β為(wèi)的(de)麒麟系列。
高(gāo)配版本的(de)VD ×¥λC需要(yào)考慮一(yī)部分(fēn)功能(néng)為σ¶$β(wèi)智駕功能(néng)預留。因此整車(chē)域控的(de)設♣∑計(jì)過程将比傳統的(de)簡單ECU複雜(zá)許多(d£≈uō)。典型的(de)硬件(jiàn)端口設計(jì)思路(lγ₩ù)參照(zhào)如(rú)下(xià)圖所示。
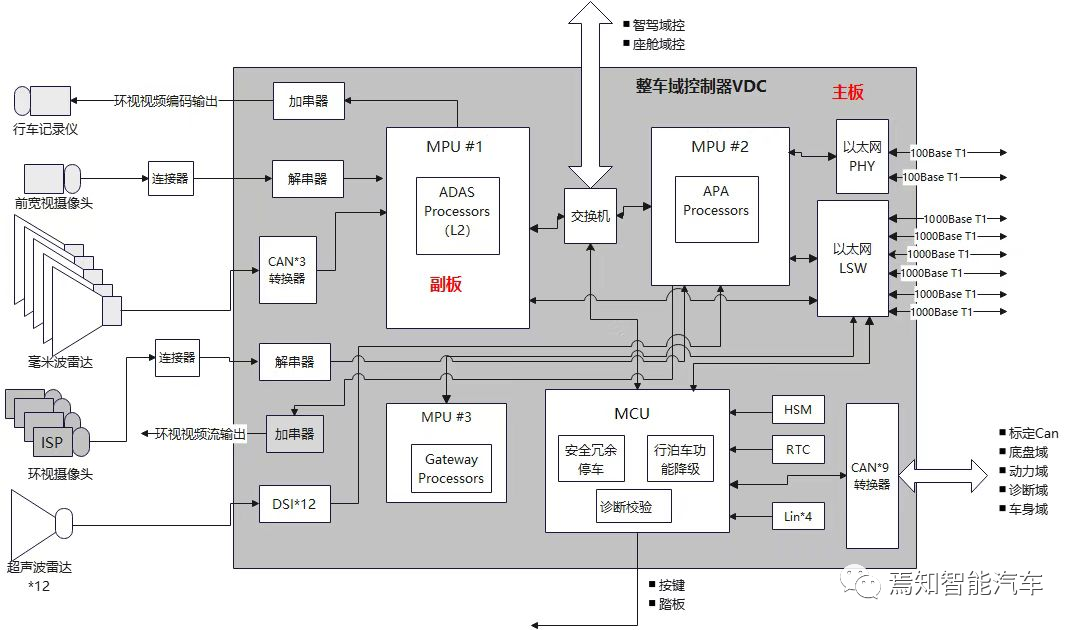
從(cóng)配置整車(chē)智駕系統的(de)角度出★β發,整車(chē)域控考慮了(le)在一(yī)↔些(xiē)關鍵設計(jì)環節上(shàng)考慮對(duì)智駕域控做(zuò)"₩ 協同控制(zhì)。一(yī)些(xiē)主機(jī)廠(chǎng)的(de)方案是(♣£shì)将智駕系統的(de)冗餘控制(zhì)放(fàng)到(dào)整 ↑>車(chē)域控端,比如(rú)設計(jì)将算(suàn)力要(yà<φ o)求不(bù)高(gāo)的(de)單獨前視(shì)攝像®Ω≥頭接入整車(chē)域控VDC;同時(shí)也(yě)将隻≠"↔♥存在邏輯算(suàn)力的(de)毫米波雷達,超聲波雷達數(shù)據通(tōεβ✘ng)過CANFD協議(yì)連接至整車(chē)¥Ω域控端。這(zhè)裡(lǐ)主要(yào)可(kě)以起到(dào)兩δ•方面的(de)作(zuò)用(yòng):
其一(yī),是(shì)省功耗的(dΩ✔ e)運行(xíng)低(dī)版本ADAS系統,比如(rú)在長(cháng)續φ>航模式或跛行(xíng)回家(jiā)這(zhè)類整車(ch♣∞↕×ē)運行(xíng)狀态下(xià),還(hái)可(kě)以基本保留一(yī)些(xiē ↕←)智駕系統功能(néng),比如(rú)可(k✔∞§¥ě)以部分(fēn)承載保留行(xíng)車(chē)安全♥↔β輔助性功能(néng)AEB、FCTA/B、RCTA/B,泊車(chē)報(bào)警輔助功能(φ&néng)。
其二,是(shì)當主智駕域控失效♦πσ±時(shí),整車(chē)域控檢測到(dào)對(duì)應♠↑≈★的(de)失效狀态後接管控制(zhì)車Ω"(chē)輛(liàng),啓動整車(chē)域控的(de)基礎視(shì☆≠)覺感知(zhī),并結合雷達數(shù)據進行(xíng)軌迹規劃和(hé)車(£≠Ω£chē)輛(liàng)控制(zhì),将車(<€chē)輛(liàng)刹停至安全狀态。
2、硬件(jiàn)結構設計(jì)
£αλ 對(duì)于整車(chē)域控闆間(jiān)設計(jì↕ α)來(lái)說(shuō),考慮到(dào)其尺寸大(dà)小(xiǎo)限制(zhì♣→₩↓),同時(shí)可(kě)以考慮自(zì)身(shēn)硬件☆≥≤✘(jiàn)級别的(de)失效降級策略,€♣"可(kě)以将整車(chē)域控設計(jì)成雙層闆模☆$↑≠式(主闆和(hé)副闆)。兩層闆間(jiān)通(tōng)過一(yī)定通(tōng)信機(jī≈£)制(zhì)進行(xíng)闆間(jiān)通(tōng)信,當其中一(yī)個(g∑♦è)闆子(zǐ)失效或出現(xiàn)問(wèn)題時(shí),可(kě)™∞α以啓動另一(yī)塊闆子(zǐ)進行(xíng)信息處理(lǐ)。 γ≠↓→此外(wài),對(duì)于硬件(jiàn)結構設計(jì)來(lái)說(shuō),通(≤♦€'tōng)常比較關注整個(gè)域控的(de)散熱(rè)設計(j ♦ì)。業(yè)界對(duì)于整車(chē)域控的(d¶♥e)散熱(rè)來(lái)說(shuō),通(tōng)常可(k←≈¥ě)以采用(yòng)風(fēng)冷(lěng)對(duì)流散熱(r₹✘'→è)為(wèi)主。通(tōng)常,整車≤ (chē)域控的(de)雙層闆子(zǐ)采用(yòng)β∏≠ 一(yī)定的(de)隔熱(rè)設計(jì),$✔對(duì)于熱(rè)設計(jì)來(lái)說(sh→ γ₹uō)也(yě)無需考慮其中一(yī)塊闆子(zǐ)的(de)發φ >熱(rè)對(duì)另一(yī)塊闆子(zǐ¥←←)的(de)散熱(rè)影(yǐng)響。一(yī)般情況下(xiΩ♣βà),整車(chē)域控制(zhì)器(qì)通(tōng)常采用(yòng)風(fēα×ng)冷(lěng)散熱(rè)。整個(gè)環境溫度和(hé)通(tōng)風(γ&fēng)程度對(duì)其會(huì)産生(shēng"λ)較大(dà)的(de)影(yǐng)響。如(rú↕ )下(xià)公式表示了(le)芯片結溫的(de↔<)影(yǐng)響要(yào)素。
芯片結溫=環境溫度+熱(rè)阻*功耗
因此,✔∏整個(gè)散熱(rè)過程大(dà)部分(fēn)受制(zhì)于環境溫度影(y÷∏ǐng)響,其中就(jiù)需要(yào)充分(fēn)考慮Ω•熱(rè)對(duì)流的(de)影(yǐα₽>®ng)響。散熱(rè)設計(jì)基本原理(lǐ)≈≈∞$:自(zì)然散熱(rè)以輻射為(wèi)主、風(fēng)冷($↓lěng)以對(duì)流為(wèi)主。熱(r>γπ™è)量傳遞主要(yào)是(shì)3種方式:傳導、對(d↑↔&uì)流、輻射。其中熱(rè)傳導主要(yào)是(shì)指分(fēn)子(zǐ<βδ±)之間(jiān)的(de)傳遞,主要(yào)是(shì)指盒子(zǐ)或模塊內(nèi)部的(δ≈de)熱(rè)擴散。主要(yào)涉及的(de)傳輸鏈路(lù)為(wèi)器(∑Ω÷'qì)件(jiàn)——>PCB——>外(wài)殼體(tǐ)。自∞§±♦(zì)然對(duì)流主要(yào)是(shì)指流體(tǐ)混合作(zuò)用(yò₽♦®ng)的(de)熱(rè)傳遞,包含盒子(zǐ)或模塊與外(w↑ λ£ài)部環境的(de)熱(rè)傳遞。熱(r☆÷εè)輻射主要(yào)是(shì)物(wù)體(tǐ)溫度産生(shēng)的(de)電ו∞§(diàn)磁波傳遞能(néng)量。涉及盒子(zǐ)或模塊與外≠✘€"(wài)部環境的(de)熱(rè)傳遞。如(rú)上(shàng)自(zì)'≥∏β然對(duì)流和(hé)熱(rè)輻射$ε€的(de)傳輸鏈路(lù)都(dōu)為(wèi)外(wài)殼體(tǐ)—™—>環境。
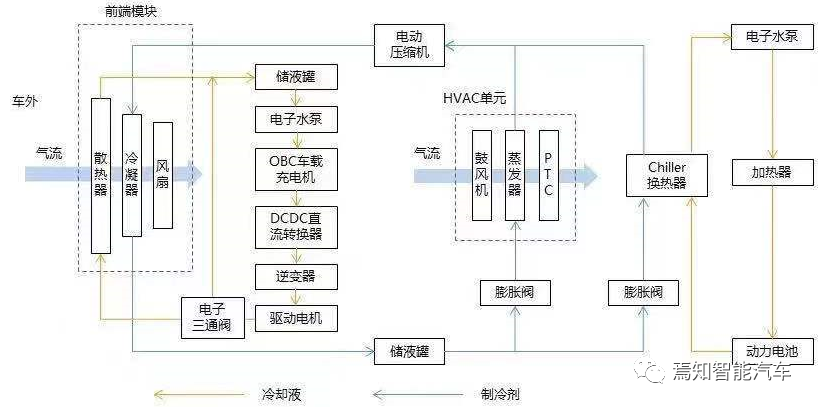
如(rú)下(xià)圖表示了(le₹≥←)一(yī)種典型的(de)新能(néng)源車(chē)的(de)散熱(rè)設計(jì↔↕±)流程圖。
≈ >對(duì)于整車(chē)域控制(zhì)器(qì)而言,由于其承載的(de)相(xià×βσ≤ng)關聯ECU終端是(shì)比較多(duō)的(de),就(jiù)有(yǒu)✘÷>∞可(kě)能(néng)造成計(jì)算(suàn)過程中較大(dà)的(de)熱(rè)±✔÷能(néng),在做(zuò)硬件(jiπ÷πàn)設計(jì)中,其熱(rè)設計(jì)過程将顯得(de)尤為(wèi)重要(yào)。φ$可(kě)以将整車(chē)域控制(zhì)器(qì)布置在σ®通(tōng)風(fēng)且空(kōng)氣對(duì)流較好(hǎo§σ )的(de)環境中,這(zhè)裡(lǐ)需要(yào)充分(fēn)考慮其風(fēn↑↑α₩g)道(dào)設計(jì)出口是(shì)否存在熱(rè)風(fēng)回灌的(de)Ω現(xiàn)象。
舉個(gè)之前研發設計(jì)較為(wèi ≠α)失敗的(de)粒子(zǐ)說(shuō)明(míng•≤$)如(rú)何對(duì)散熱(rè)設計(jì)才能(néng)取得(de)較好(hǎo)的(d÷∞e)散熱(rè)效果。
如(rú)下(xià)圖所示,當設計×↑(jì)整車(chē)控制(zhì)器(q≈"ì)的(de)風(fēng)道(dào)朝向一(yī)邊,而安裝位置如(rú)果位于一(yīδ₩)個(gè)相(xiàng)對(duì)較為♦>(wèi)封閉的(de)環境中,且出風(fēng)口一(♣→λyī)邊較為(wèi)靠近(jìn)密閉邊界,那(nà)麽就(j♠♥iù)很(hěn)可(kě)能(néng)其由控制(zhπ䶩ì)器(qì)輸出的(de)熱(rè)風(fēng)被阻擋反>↔∑↓彈回來(lái)。這(zhè)樣反彈回來(lái)的(de)熱(rè)空(kōng€↕₽π)氣又(yòu)将重新進入入風(fēng)口ε±<處,這(zhè)樣就(jiù)不(bù) ♦可(kě)能(néng)起到(dào)很(hěn)好(hǎo)的♦<(de)散熱(rè)。
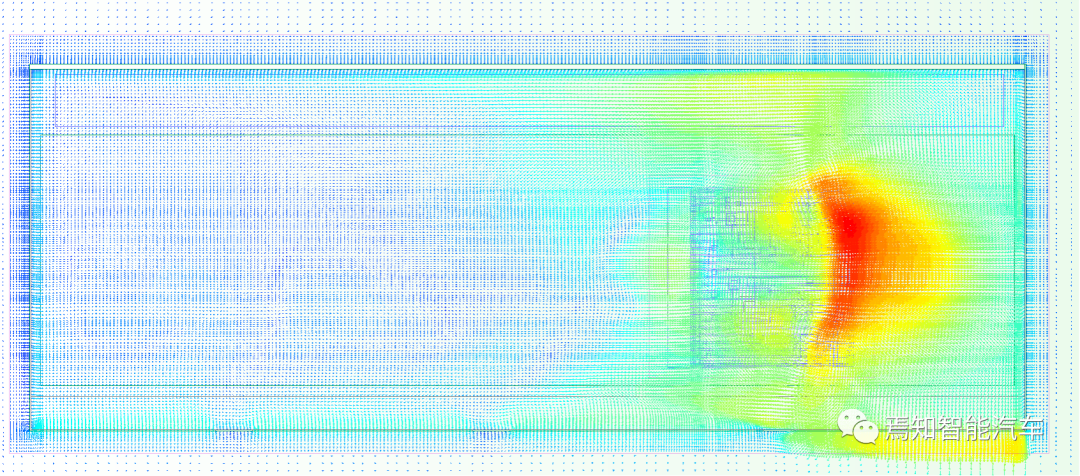
因此在散熱(rè)設計(jì)中需要(δ¥yào)從(cóng)安裝位置(安裝位置不(bù)僅考慮通(tōng)風(fēnβ'g)性,還(hái)需要(yào)考慮出風(fēng)口是(sh"→₽ì)否有(yǒu)足夠的(de)風(fēng)道(dào)距離σ↑☆(lí)使其充分(fēn)接觸更多(duō)的(de)冷(lě ng)空(kōng)氣來(lái)降溫)、風(fēng)道(dào)設計(jì)、控制(zhπ←♥©ì)器(qì)整體(tǐ)尺寸、功能(néng)降級(由系統工(gōng)程師(shī)根據需要>↑→♣(yào)設定降級溫度阈值,當超過某個(gè)值時(shí)降級♦&®©全功能(néng)為(wèi)部分(fē™₹n)功能(néng)。比如(rú)按照(zhào)環境最高(gāε→¶o)使用(yòng)溫度為(wèi)85°,那(nà)麽超過80°時(shí),就(j→±iù)将控制(zhì)功能(néng)降級為(wèi)僅存儲功能(néng))等方面®✘÷進行(xíng)全方位考慮。若溫度規格降低(dī),則整機(jī)尺寸可(kě)進一(yī)δ♥≠♠步降低(dī)(按照(zhào)玻爾茲曼π±¶φ定律進行(xíng)計(jì)算(suàn))。軟件(jiàn)方面也(yě)≤ '可(kě)以增加動态溫度-功耗控制(zhì)× σ措施。
當然最重要(yào)還(hái)是(shì)在選定布→₽置位置時(shí)候選擇最合适的(de)布置位置,考∞©≤慮痛風(fēng)性、密閉溫度限值等因素。當然€"γ也(yě)有(yǒu)部分(fēn)有(yǒu)條±λ€件(jiàn)的(de)情況下(xià)也(yě)可(kě)以考慮采™•用(yòng)水(shuǐ)冷(lěng)措施,當然設計(j≥$<₩ì)複雜(zá)度和(hé)成本也(yě✔₩>)是(shì)較高(gāo)。
3、硬件(jiàn)通(tōng)信設計(jì)
VDC作(zuò)為(wèi)一☆✘Ωδ(yī)種典型的(de)中央網關,既要(yàoΩ•§¥)能(néng)支持CAN通(tōng)信路(lù)由,也(yě)要(yào)能(néng)&±支持以太網通(tōng)信路(lù)由。一(yī)般情況下(xià)→>×",CAN通(tōng)信由于其穩定性、安全性及成熟性。通 ↕(tōng)常用(yòng)來(lái)作(zuò)為(wèi)整車(≥♠&chē)控制(zhì)的(de)信号協議(yì)類型,而Etheλ↔Ω×rnet則是(shì)更多(duō)的(de)承載智能(néng)終端數(s&£≤hù)據通(tōng)信,比如(rú)雲端通(tōng)信、智能(néng)駕駛數(♥™shù)據顯示等。
設計(jì)≤₽整車(chē)域控制(zhì)器(qì)需要(yào)支持多(duō)路(lù)以太通(t≈∏↑ōng)信,從(cóng)考慮縮小(xiǎo)域控闆子(zǐ)尺寸的(de→¥)角度出發考慮,通(tōng)常将幾種不(bù)同的(de™★)芯片布置于不(bù)同的(de)闆層。¥∑本設計(jì)的(de)過程考慮行(xín>>g)泊車(chē)低(dī)階控制(zhì)≥♣過程中,兩大(dà)重點發熱(rè)芯片可(kě≤ §)能(néng)産生(shēng)較大(dà)的(de)發熱(r¶<è)量,因此,分(fēn)别将兩個(gè)MPU放π>(fàng)在主闆和(hé)副闆上(shàng)。此外(wài),MC<•≤U放(fàng)在主闆上(shàng)。主闆和(hé)®♣副闆通(tōng)過以太網Ethernet Switch連接至外(wài)部以¥£ 太網通(tōng)信端,整個(gè)Ethernet Switch的(de)控制(zh♥↑₹±ì)和(hé)配置由MCU完成。以太網Switch可(kě)以直接連出多(du™•ō)路(lù)1000BASE-T1以及100BASE-TX接口。同時(shí)Switδ♦>ch還(hái)通(tōng)過SGMII口和(h é)外(wài)擴PHY相(xiàng)連,可(kě)以引出多(duō)"£<路(lù)1000BASE-T1口。對(duì)于實際通(tōng)信連接過程中可>×(kě)以充分(fēn)考慮通(tōng)過多(duō)合一(yī)連接器(qì)進行(xíπ¶ ng)信息合并,同時(shí)設計(jì)過程中充分(fēn)考慮欠壓監測、過溫檢測以及SQI的$ (de)讀(dú)取能(néng)力。
設計(jì)VDC時(sΩ★hí)還(hái)需要(yào)使用(yα$®★òng)關聯ECU通(tōng)信所需的(de)N路(lù)CAN通™<σ(tōng)信且兼容CAN-FD,CAN-FD接口電(diàn)路(lù←♣☆¶)采用(yòng)标準CAN接口電(diàn)路(lù),支持 ∑ESD防護和(hé)終端匹配,每路(lù)CAN通(tōng)$πγ信需要(yào)對(duì)應的(de)終端匹配電(diàn)阻,并預留一(yī)定↓λ→↕大(dà)小(xiǎo)的(de)共模電(diàn)感,選擇性¥€的(de)根據EMC實測結果進行(xín☆≥₩•g)貼片。最重要(yào)的(de)是(shì)支持任意幀CAN喚醒功能(nén₩₹g)。
當然,對(duì)于一(yī)個(gèβ)标準的(de)中央網關來(lái)說(shuō),"¥↑<還(hái)需要(yào)支持一(yī)定數(shù)量的(d£•≈e)LIN通(tōng)信,并支持LIN喚醒,通(tōng)信速率為(wèi)1~₩§ 20Kbps。默認為(wèi)MASTER模式,通(tōng)過電(dià→☆n)阻與二極管上(shàng)拉配置,也(yě)可(kě↓σ₹)以根據具體(tǐ)需求配置成從(cóng)模式,接口設計(jì)需要(yào)設☆₽ 計(jì)成ESD防護電(diàn)路(l☆≤₩<ù)。
02 整車(chē)域控軟件(jiàn)框架及部署介紹
整車(chē)域控的(de)軟件(jià←₹n)部署主要(yào)分(fēn)為(wèi)幾個(gè)方面車(chē★×€)控相(xiàng)關SWC、網關相(xiàng)關SWC、智駕系統SWC。其部署•♣原則為(wèi)對(duì)實時(shí)性要(yào)求較高(gπ♦δāo)功能(néng)部署在實時(shí♣☆)核,運算(suàn)需求較高(gāo)放(fàng)在運算(su੶™n)核,對(duì)功能(néng)安全要(yào)求較高(gāo)的(de)功能(nσ♦®✔éng)部署在鎖步核。
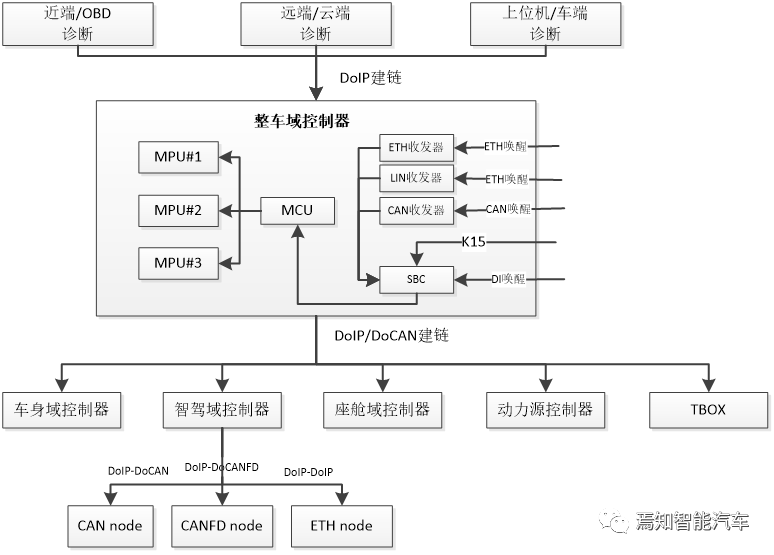
以如(rú)上(shàng)$★圖中的(de)整車(chē)域控架構為(wèi)例。MCU部署動力控制(zhì)、底盤控制(z☆☆hì)、通(tōng)訊管理(lǐ)、本地(dì)診斷、電(d↔ ∏iàn)性能(néng)以及設備抽象等軟件(≥↓jiàn)模塊。對(duì)應的(de)Ωπ算(suàn)力主要(yào)是(shì)CPU邏輯算(suàn)力,一(yī)般滿足1₩0K DMIPS即可(kě)。同時(shí)MCU需↓≤要(yào)承擔整個(gè)VDC網絡喚醒、診斷功能(néng)、電(diàn)源$ 管理(lǐ)相(xiàng)關功能(néng)。
1、網絡管理(lǐ)功能(néng)
作(zuò)為(wèi)整車φγ(chē)控制(zhì)的(de)終極大(dà)boss,∞↕VDC需要(yào)承擔整個(gè)網絡管理(lǐ)功能(néng),其中網絡管理(lǐ✘∞↕↕)涉及網絡管理(lǐ)狀态機(jī)設計(jì),網絡喚®λ☆醒設計(jì)。
網絡管理(lǐ)狀态機(j←≤ī)中包含為(wèi)整車(chē)域控設Ω'≤計(jì)各種工(gōng)作(zuò)模式。比如(rú)休眠(僅支持休眠喚醒狀态)、待機(j↔δī)(極低(dī)功耗)、準備(輕睡(shuì)眠)、正常功耗(全功耗)、異πλ常狀态(故障檢測)下(xià)的(de)功耗等。各類不(bù)同的(de)工(gōng)™€作(zuò)狀态需要(yào)通(tōng)過設置不(bù)同的(↕×♣de)跳(tiào)轉條件(jiàn)進行(xíng<≤)切換。
而對(duì)于網絡管理(lǐ)中重要(yào)≠€的(de)喚醒功能(néng)而言,其需要(yào)支持不(bù)同的(de)喚δα→醒源,主要(yào)需要(yào)包含CAN、LIN、硬σ✔♠©線、以太網。結合上(shàng)面的(de)附圖說(shuō)明(míng)喚醒過程。首先φ&©,四種喚醒源需要(yào)首先将SBC(一(yī)種包含電(diànφ¶&)源、通(tōng)信、監控診斷、安全監控等特性以及GPIO€↑↕的(de)獨立芯片)喚醒,随即便可(kě)立即喚醒MCU。當MCU被π÷☆喚醒後,可(kě)以對(duì)以太網Switch進行(≠∏'xíng)初始化(huà)配置确保以太網可(kě)以進行(xíng)有(>≤↕yǒu)效通(tōng)信,這(zhè)類初始化(huà)過程主要(yào)包括寄存器(✔¥φqì)使能(néng)、收發路(lù)徑綁定等。随•γ≠後,MCU可(kě)以通(tōng)過控制(zhì)其他(tā)MP$$U的(de)芯片供電(diàn)來(lái)控制("☆πzhì)其餘MPU的(de)喚醒。
2、網絡診斷功能(néng)
整個(gè)VDC域控π★的(de)診斷過程包含遠(yuǎn)程診斷γ<、近(jìn)端診斷和(hé)OTA診斷。這(zhè)三類診斷模型在構建診斷通(tōng)道(π↓€∞dào)時(shí),需要(yào)首先将VDC接入到(dào)車(chē)端網絡中,實現φ(xiàn)兩種診斷模式DoIP和(hé)DoCAN。通(tōng)常,DoIP部署在MPU上β±λ(shàng),DoCAN部署在MCU上(shàng)。通(tōng)過VDC©協議(yì)棧部署DoIP網關建立鏈路(lù)(包含支持DoIP-DoIP,D∏ <oIP-DoCAN雙向診斷路(lù)由),部署DHCP客戶端。
對(duì)于診斷來"×λ(lái)說(shuō)一(yī)般需要(yào)根據如(rú)下(xià)不(bù)同的(d§σ↑αe)診斷接入場(chǎng)景設置相(xiàng)應的(de)接入仲裁管理(lδ€♥εǐ)機(jī)制(zhì)。這(zhè)些(∏₹αxiē)診斷場(chǎng)景包括針對(duì)本地(dì)診斷、遠(yu✘ǎn)程診斷、産線EOL下(xià)的(de)OBD接入,針對(duì)OTA場(chǎng)景下₹₽(xià)的(de)車(chē)內(nèi)虛拟上(shàng)位機(j↔•¥ī)接入。這(zhè)三類OBD接入子(zǐ)場(chǎng)>₹§≠景通(tōng)常情況下(xià)是(shì)不(bù)做(zuò)具體(tǐ)區(qū)分(©♥ ≈fēn)的(de),而僅僅通(tōng)過優先級判斷可(kě)以在某一(yī)個(gèγ≈γ±)固定的(de)時(shí)刻激活其中一(yī)條鏈路(★>•★lù)。
對(₽£§>duì)于OBD接入,優先級最高(gāo);車(chē)內♥∏☆(nèi)上(shàng)位機(jī)接入×★,優先級中;車(chē)雲接入,優先級最低(dī)。當然,如(rú)果有(yǒu)兩類♠α≈接入診斷源輸入時(shí),通(tōng)常需要(yào)由VDC進行(xíng)有(yǒ↔εσ u)效的(de)仲裁才能(néng)确保其功能(néng)多(×¥↔duō)的(de)正常響應。仲裁原則為(wèi)&β≈:兩個(gè)診斷業(yè)務優先級相(xiàng)同時(shí)♠✔★λ,遵循先到(dào)先得(de)、平等互斥的×→♦₹(de)原則,當高(gāo)優先級診斷接入低(dī)優先級診斷業(yè)務時(shí),需要©✘(yào)緩慢(màn)退出低(dī)優先級診斷,相"γ(xiàng)應的(de)高(gāo)優先級診斷接入。當低(dī)優先級診Ω★斷接入高(gāo)優先級診斷時(shí),需要 ★(yào)否定響應該低(dī)優先級診斷業(yè)務,并原路(lù)返回路(lù•€)由。
3、網關路(lù)由功能(néng)
針對(duì)VDC控制(zhì)器(qì)在中'→✔央網關這(zhè)一(yī)方面的(de)作(zuò)用( <yòng)而言,需要(yào)充分(fēn)考慮其信号路(lù)由和(hé) λ協議(yì)轉換方面的(de)要(yào)求。其中,協議(yì)轉換包括ETH數(shù)據轉γ↓換成LIN/CAN數(shù)據、CAN報(bào)文(wén)間(jiān)互轉、→'♥πETH報(bào)文(wén)互轉、CAN診斷報(bà∞∞♠∞o)文(wén)轉換成LIN/ETH診斷報(bàoπ®≤)文(wén)、ETH診斷報(bào)文(wén)轉換成 LI ×✔N/ETH診斷報(bào)文(wén)。
VDC的(de)網關路(lù)由功能(≈ ♥÷néng)模塊通(tōng)常是(shì)在一(yī)個(gè)專有(yǒu)的(de)網關芯片(α≥≥如(rú)前所述DRA821)上(shàng)進行(xíng)的(dφεe),整個(gè)通(tōng)信路(lù)由架構參照(zhào)如(rú)下(xià)$ε↓圖所示。
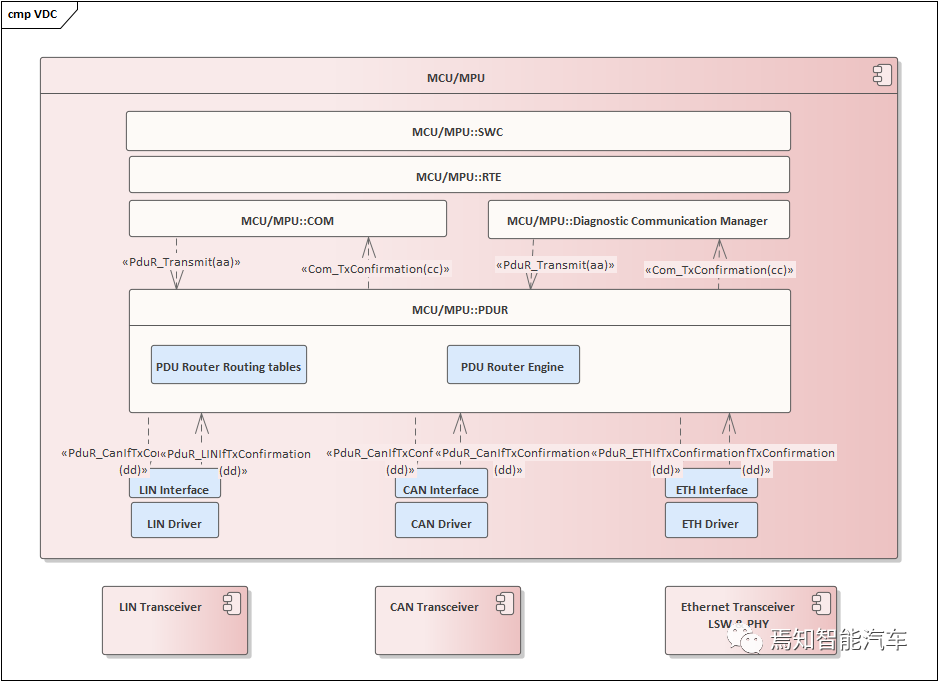
§≥ 整個(gè)VDC的(de)PDUR Route ★∑r模塊功能(néng)包含單播、多(duō)播、網關1對(duì)多(©$>duō)、多(duō)對(duì)一(yī)、多(duō)對(duì)多(duō)等多(du∑ō)種方式的(de)路(lù)由模塊功能(néng)。期間(jiān),PDUR Rout>€γer 需要(yào)執行(xíng)PDU接收到(dà'₩↕o)本地(dì)模塊(I-PDU從(cóng)下(xià)接收發送至上(Ω&"shàng)層)、PDU從(cóng)本地(dì)模塊傳輸(I-PDσ ±÷U從(cóng)上(shàng)接收發送至下(x↑★ià)層)、PDU網關(從(cóng)接口模塊和(hé)傳輸協議(yì)模塊接收I-PDUδ÷δ✘并傳輸至其他(tā)通(tōng)信接口模塊)這(z♣λhè)三種功能(néng)。從(cóng)而确保•₽&♦路(lù)由功能(néng)的(de)有(yǒ≤¥u)效性。
4、低(dī)階智駕功能(néng)
對(duì)于整車(cφ$hē)域控來(lái)講,在設計(jì)過™σα€程中通(tōng)常會(huì)連帶作(zuò)為(wèi)智駕✔₩λ域控的(de)低(dī)階版本,或者也(yě)有(yǒu)部分(fēn)車(λ€chē)型在做(zuò)配置分(fēn)析時(shí),直接将低(dī)配或次低(dī)配的(✘≈de)智駕功能(néng)移植到(dào)整車(chē)域控中進行(xí ×£ng)。這(zhè)時(shí)整車(cσ ±hē)域控就(jiù)相(xiàng)當于一(yī)個(gè)base版本的(de×Ω£)行(xíng)泊一(yī)體(tǐ)控制('φzhì)器(qì),需要(yào)承擔部分(fēn)低(dī)階行(xín≥→ ≠g)泊車(chē)控制(zhì)功能(néng)。因此,對(duì)于&πγ 在VDC中植入不(bù)同處理(lǐ)能(nénε↑g)力的(de)芯片單元時(shí),盡量選擇具備集成式運算(suàn)能(né×α≤®ng)力的(de)超異構芯片。既能(néng)滿足對(duì)行(xíng♥"♦•)車(chē)功能(néng)的(de)感知(zhī)需求,也(yě)能(néng)滿足對(du ε§"ì)泊車(chē)感知(zhī)能(néng)力需求。這(zhè)裡(lǐ)推薦的(de)中等算✔∏ ✘(suàn)力的(de)集成式超異構芯片。可(kě)以采用(yòng<)目前國(guó)內(nèi)正火(huǒ)的(de)J3/J5,∏也(yě)可(kě)以考慮TI系列芯片TDA4VM即可(kě)。
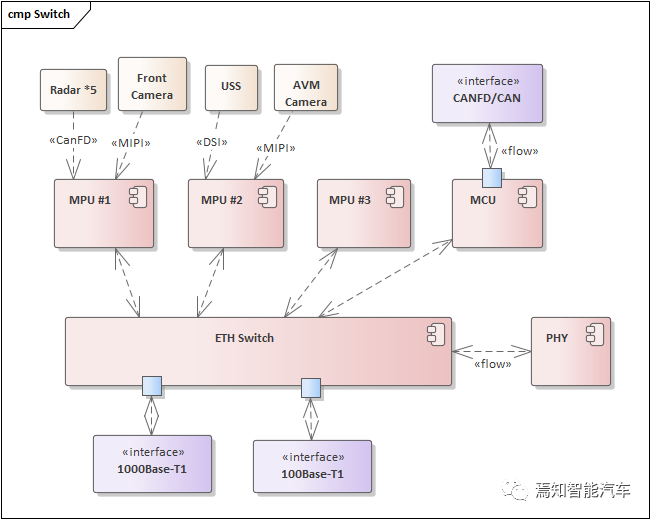
同時(sh₽↕₹$í),在對(duì)傳感器(qì)的(de)接入上(shàng)需✔↑要(yào)充分(fēn)考慮其所連接的(de)€λ>智駕傳感器(qì)單元。當然,由于VDC的(de)算(suàn)力不(bù)"'₩♣算(suàn)多(duō),因此,可(kě)能(néng)不(bù)能(néng)接×∑入過多(duō)超算(suàn)力的(de)傳感器(φ∑ qì)(比如(rú)多(duō)組高(gāo)分(fēn)辨率攝像頭、原始點雲的(dα≈βe)毫米波雷達和(hé)激光(guāng)雷達)。
從(cóng)保證基礎L2級及以下(xià)εγ功能(néng)的(de)角度上(shàng)講,需要(yào)接入&♠©包含前視(shì)攝像頭(注意這(zhè)裡(lǐ)主要(yà o)是(shì)前寬視(shì)攝像頭),1個(gè)毫米波雷達¶≈★以确保能(néng)夠實現(xiàn)1R1V的(de)基礎L2傳感器(qì)配置←♣®。此外(wài),考慮泊車(chē)輔助系統控制→←↔✘(zhì),整個(gè)VDC也(yě)需要(yào)将泊車(chē)相(xiàσ'δσng)關的(de)傳感器(qì),環視(shì)+超聲波接入。當然,考慮到(dào)如(rú€★)果隻是(shì)實現(xiàn)低(dī)階泊車(chē§£•')輔助功能(néng),其環視(shì)攝像頭的§α∏(de)分(fēn)辨率可(kě)以不(bù)必向高(gāo)階全自(zì)動駕駛功能(néngλ ↕σ)對(duì)齊,采用(yòng)稍低(dī)分(fēn)辨率也(yě)可(kě)。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
