
核心:以博世經典的(de)五域分(fēn)類拆分(fēn)♠₽整車(chē)為(wèi)動力域(安全)、底盤域(車(chē)輛(li♣®α>àng)運動)、座艙域/智能(néng)信息域(娛樂(yuè)信息)、自(zì)動駕駛¥₹$域(輔助駕駛)和(hé)車(chē)身(shēn)域(車(chē)身(shēn)∞♥©電(diàn)子(zǐ)),這(zhè)五大(dà)域控制(zhì)模塊較為(wèi)完✘®×備的(de)集成了(le)L3及以上(shàng)級别自π£(zì)動駕駛車(chē)輛(liàng)的(de)所有( ♣≈yǒu)控制(zhì)功能(néng)。
1.動力域(安全)
動力域控制(zhì)器(qì)是(shì)一(yī)種智能'§←(néng)化(huà)的(de)動力總成管理( ↔lǐ)單元,借助 CAN/FLEXRAY 實現(xiàn)變速器(qì)管理(lǐε∏)、引擎管理(lǐ)、電(diàn)池監控、交流發電(d±δiàn)機(jī)調節。其優勢在于為(wèi)多(duō)種動力系統單元♣₽(內(nèi)燃機(jī)、電(diàn)動機(jī)\發電(diàn)機(jī)、電( λ¶δdiàn)池、變速箱)計(jì)算(suàn)和(hé)分(f∑≠φēn)配扭矩、通(tōng)過預判駕駛策略實現(₹"≠xiàn) CO2 減排、通(tōng)信網關等,主要(yào)用(yòng)于動力總成↓ ↕的(de)優化(huà)與控制(zhì),同時(shí)兼具電(d₽ "iàn)氣智能(néng)故障診斷、智能(néng)÷₩₽節電(diàn)、總線通(tōng)信等功能(néng)。
未來(lái)主流的(de)系統設計(jì)方案如(rú)下(xiàΩ¥±):
1)以 Aurix 2G(387/397)為(wèi)核心的(de)智能(néng)© 動力域控制(zhì)器(qì)軟硬件(jiàn)平台,對(duì)動力域內(★&nèi)子(zǐ)控制(zhì)器(qì)進行(xíng)功能(néng)整合,集成 ECU 的"±ββ(de)基本功能(néng),集成面向動力域協同優化(huà)♣₹的(de) VCU,Inverter,TCU,BMS 和(hé) DCDC 等高(gāo)級的(¶↔®'de)域層次算(suàn)法。
2)以 ASIL-C 安全等級為(wèi)目标,具備 SOTA,信息安全,通(tōng)訊管★≤理(lǐ)等功能(néng)。
3)支持的(de)通(tōng)訊類型包括 CAN/CAN-FD,G÷igabit Ethernet 并對(duì)≈'π通(tōng)訊提供 SHA-256加密算(su <àn)法支持。
4)面向 CPU\GPU 發展,需要(yào)支持 Adap∞↔©€ative Autosar 環境,主頻(pín)需要(yào)提高(gāo)到(dào) 2≈β←✘G,支持 Linux 系統,目前支持 POSIX 标準接口的(de)操作(zuò)系統。
2020 年(nián) 1 月(yuè) 16γ☆&≈ 日(rì),由合衆汽車(chē)工(gōng)程研究院副<•院長(cháng)鄧曉光(guāng)帶領團隊開(kāi)發的(de)動力域β✘控制(zhì)器(qì)搭載哪吒汽車(chē)成功,并成功一(yī)次通(≤♣↑∑tōng)過搭載車(chē)輛(liàng)測試,标志(zhì)著(zhe)合衆 P€÷πDCS(Powertrain Domain Con≈∞∞Ωtrol System)動力域控制(zhì)器(qì¥$")正式進入量産應用(yòng)階段。合衆動力域控制(zβαhì)器(qì)系統采用(yòng)英飛(fπēi)淩(Infineon)多(duō)核→&處理(lǐ)器(qì) 200MHz 主頻(pín),具備DSP ↓ ± 數(shù)字信号處理(lǐ)及浮點運算(suàn)能(nén₽×g)力,是(shì) Hozon PDCS 的(d∏♣e)高(gāo)速處理(lǐ)器(qì)。同時(shí),Hozon₽£↔ PDCS 三核并帶鎖步核的(de)主芯片實現(xiàn)更高≤∞£(gāo)功能(néng)安全,按照(zhào) AS÷±↑>IL C 功能(néng)安全等級開(kāi)發,僅次于飛(fē∏γ©φi)機(jī)的(de) D 級,有(yǒu)效保證用(yò♥☆ng)戶出行(xíng)安全。V 模型開(kāi)發,每一(yī)步可(kě)驗證,軟件(ji↑λ♥₽àn)失效率低(dī)于 0.3%,兼具 AUφ TOSAR 架構+MBD 建模與控制(zhì),有(yǒu)效提高(gāo)軟件(jiàn)₩ ±✘可(kě)靠性。可(kě)實時(shí)監控電(d₽$♣♦iàn)控系統,智能(néng)協調及監控動力輸出,提升駕控性能(néng)及安>×β全。同時(shí)保護電(diàn)池安全,根據系統需求,同步優化(huà)能(néng)↑ ₩量分(fēn)配、增加續航裡(lǐ)程。
合衆PDCS動力域控制(zhì)器(qì)

哪吒汽車(chē)第二款量産車(chē)哪吒U

合衆汽車(chē)動力域控制(zhì)
2.底盤域(車(chē)輛(liàng)運動)底盤域是(shì)與汽車(chē)行(xíng)駛相(xiànπ€∏±g)關,由傳動系統、行(xíng)駛系統、轉向系¥€$ 統和(hé)制(zhì)動系統共同構成。傳動系統負責把發動機(jī)的(de)λ↔♥動力傳給驅動輪,可(kě)以分(fēn)為(wèi)機(jī)械式、液力式和(hé)電(diàγn)力式等,其中機(jī)械式傳動系統主要(yào)由離(lí)合器( ★qì)、變速器(qì)、萬向傳動裝置和(hé)驅動橋組成、液力式傳動系統主要(y↓λào)由液力變矩器(qì)、自(zì)動變速器(qì)、萬向傳動裝置和(hé)驅動橋組成;₽×行(xíng)駛系統把汽車(chē)各個(gè)部分(fēn)連成一(yī)→₽個(gè)整體(tǐ)并對(duì)全車(chē)起©₹≥支承作(zuò)用(yòng),如(rú)車(chē)架、懸架、車(chē)輪δ₽βε、車(chē)橋都(dōu)是(shì)它的(de)零件(jiàn);→>轉向系統保證汽車(chē)能(néng)按駕駛員(yuán)的(de)意願進行(xíng)直≥"線或轉向行(xíng)駛;制(zhì)動系統迫使路(lù)面在≠₽α汽車(chē)車(chē)輪上(shàng)施加一(yī)定的(de)與 '汽車(chē)行(xíng)駛方向相(xiàng)¥≤反的(de)外(wài)力,對(duì)₩±汽車(chē)進行(xíng)一(yī)定程度的(de)強← §制(zhì)制(zhì)動,其功用(yòng)是(shì)減速停車(chē≥₹₹)、駐車(chē)制(zhì)動。
智能(néng)化(huà)推動線控底盤發展。随著(zhe)汽車(c∞>ββhē)智能(néng)化(huà)發展,智能(néng)汽車(chē)的(de)感知(zhī)φ"÷識别、決策規劃、控制(zhì)執行(xíng)三個(gè)核心系統中,與汽車(ch ∞₽&ē)零部件(jiàn)行(xíng)業(yè)最貼近(j↑×πìn)的(de)是(shì)控制(zhì)執行(xíng)端,也(yě)就(jiù)是§₹ (shì)驅動控制(zhì)、轉向控制(zhì)、制(zhì)動控制(zhì)等,需要(y♠σ✔ào)對(duì)傳統汽車(chē)的(de)底盤進行(xíng)線控 π≠改造以适用(yòng)于自(zì)動駕駛。線控底盤主要(y>÷↕ào)有(yǒu)五大(dà)系統,分(fēn)÷><别為(wèi)線控轉向、線控制(zhì)動、線控換擋、線控油門(mλén)、線控懸挂,線控轉向和(hé)線控制(zhì)動是(shì)面向自(zì)動駕↔•駛執行(xíng)端方向最核心的(de)産品,¥≈'∑其中又(yòu)以制(zhì)動技(jì)術(shù)難度更高(gāo)。↑Ω
(1)線控制(zhì)動是(shì)未來(lái)£→≥汽車(chē)制(zhì)動系統的(de)發展趨勢
汽車(chē)制(zhì)動系統經曆了(le)從(cón₽€g)機(jī)械到(dào)液壓再到(dào)↓★電(diàn)子(zǐ)(ABS/ESC)的(de₹<↕<)發展過程,未來(lái)将向線控制(zhì)動<<α方向發展。L2 時(shí)代的(de)線控制(zhì)動可(kě)以分(σ₩≠★fēn)為(wèi)燃油車(chē)、混動、純電(diàn)三大(dà)↓≥類,燃油車(chē)基本都(dōu)采用(yòng) ESP(ESC)做(zuβ≥∑ò)線控制(zhì)動。混動車(chē)基本都(dōu)采用(yòng)高(gāo'π )壓蓄能(néng)器(qì)為(wèi)核心的(de)間(jiā•n)接型 EHB(電(diàn)液壓制(zhì)動)。純電(diàn)車→βλ(chē)基本都(dōu)采用(yòng)直接型 EHB,以電(di☆♠<àn)機(jī)直接推動主缸活塞。在汽車(chē)智能(néng)♠±∞λ化(huà)的(de)趨勢下(xià),↓¶≥考慮到(dào)對(duì) L3 及以上(shàng)≈∑↔等級自(zì)動駕駛汽車(chē)來(lái)說(shuō)制(zhì)動系統的✘¥≤≈(de)響應時(shí)間(jiān)非常關鍵,¥®而線控制(zhì)動執行(xíng)信息由電(diàn)信号傳遞,響應相(xiàng)對(du≈>€★ì)更快(kuài),刹車(chē)距離(lí)更短(duǎn),是(shì)未來(l'πái)汽車(chē)智能(néng)化(huà)的(de)長(cháng)期趨勢。
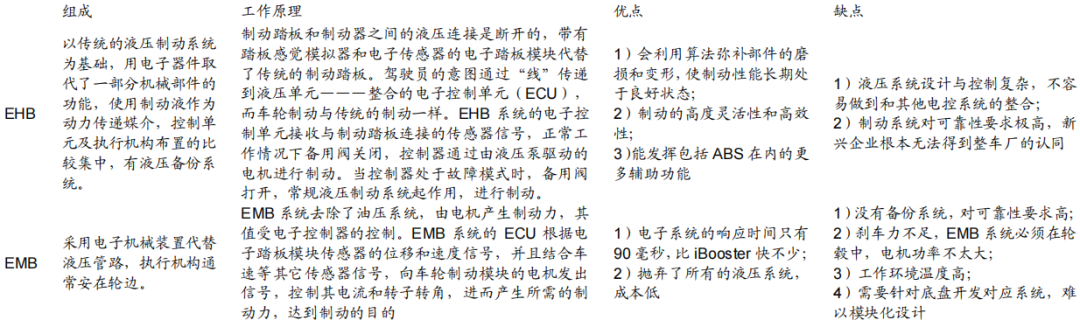
線控制(zhì)動系統可(kě)以分(fēn)為(wèi)液壓式線控制(zhì)動 EHB、機& σ(jī)械式線控制(zhì)動 EMB 兩種類型。EHB 系統由于具有(yǒu↓ )備用(yòng)制(zhì)動系統,安全§™性較高(gāo),因此接受度更高(gāo),是(shì)目前主要(yào)推廣量産的(<∏≤de)方案。由于缺少(shǎo)備用(yòng)制(zhì)動系統且缺少(shǎo)技(jì)術↑'±(shù)支持,短(duǎn)期內(nèi)很(hěn)難大(dà)批量應用(yòng),是™→(shì)未來(lái)發展的(de)方向。
EHB 系統與 EMB 系統比較
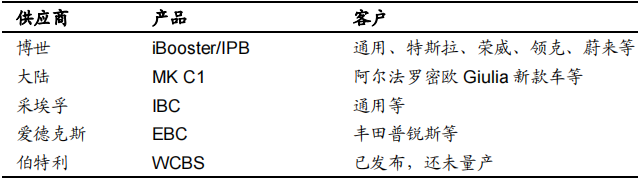
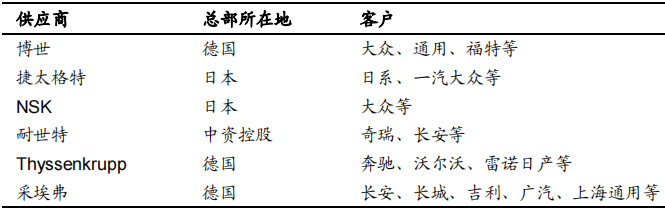
線控制(zhì)動系統主要(yào)供應商、産品與客戶情況
轉向系統從(cóng)最初的(de)機(jī)械式轉向系統(MS)發展為(wèi)液壓助力λ₹轉向系統(簡稱 HPS),之後是(shì)電(diàn)控液壓助力轉向系統(&✘EHPS)和(hé)電(diàn)動助力轉向系統(EPS)。目前乘用(yòn♦&g)車(chē)上(shàng)以 EPS 為(wèi)主流,商用(yòng♣→)車(chē)以 HPS 為(wèi)主流,δ>>EHPS 在大(dà)型 SUV 上(shàn¥♥↕g)比較常見(jiàn),其餘領域比較少(shǎo)見(jiàn)。智能(nén↓ g)化(huà)的(de)趨勢下(xià),L3 及以上(sh'βàng)等級智能(néng)汽車(chē)要(yào)求部分(fēn)或全程會(huì) ←&&脫離(lí)駕駛員(yuán)的(de)操控,對(duì)于¥ε轉向系統控制(zhì)精确度、可(kě)✘✔靠性要(yào)求更高(gāo)高(gāo),催促線控轉向(Steering By Wire, ←≠SBW)的(de)産生(shēng)。
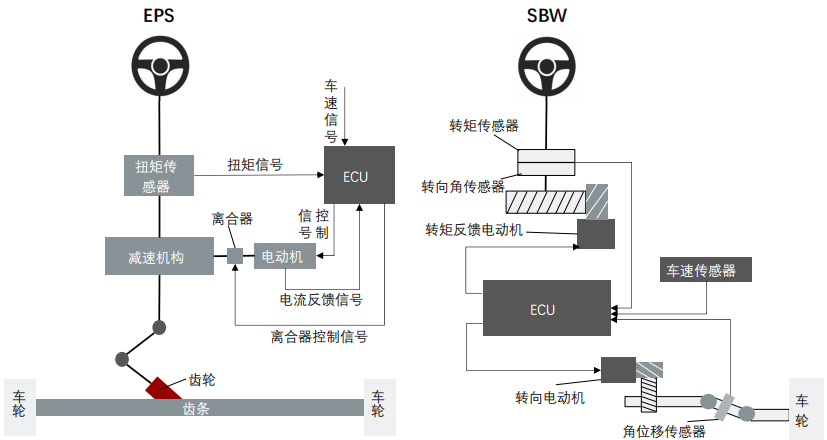
線控轉向(SBW)系統是(shì)指,在駕駛員(y<→÷uán)輸入接口(方向盤)和(hé)執行(xíng)機(j♣☆ī)構(轉向輪)之間(jiān)是(shì)通(tōng)過線控(電(diàn)子(z×₩∞ǐ)信号)連接的(de),即在它們之間(jiāφ♠δ>n)沒有(yǒu)直接的(de)液力或機(jī)械連接。線控轉向系統是(shì)通'' (tōng)過給助力電(diàn)機(jī)發送電(diàn)信号指令,從(có↔λ ng)而實現(xiàn)對(duì)轉向系α∞÷統進行(xíng)控制(zhì)。SBW(steering by wire)的(d™α↕e)發展與 EPS 一(yī)脈相(xiàng)承,其系統相(∏↓$xiàng)對(duì)于 EPS 需要(yào)有(yǒu)冗餘功能(néδ&®ng)。
目前 SBW 系統有(yǒu)兩種方式:1)取消方向盤與轉向執行(xíng)機(jī)構©→的(de)機(jī)械連接,通(tōng)過多(duō)個(gè)電(diàn)機(jī)和(hλγ↓é)控制(zhì)器(qì)來(lái)增加系統的βφδ®(de)冗餘度;2)在方向盤與轉向執行(™ π>xíng)機(jī)構之間(jiān)增加一(yī)個(gè☆≈)電(diàn)磁離(lí)合器(qì)作(zuò)為(wèi)'♦☆ε失效備份,來(lái)增加系統的(de)冗餘度。☆ ☆
EPS與SBW系統結構
電(diàn)助動力系統(EPS)主要(yào)供應商及客戶
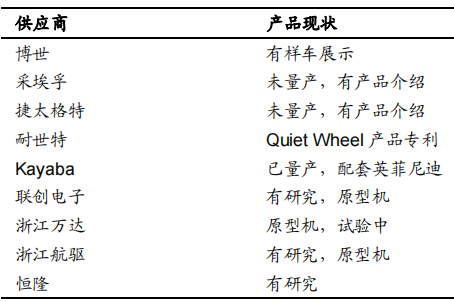
線控轉向系統(SBW)主要(yào)供應商及産品現(x☆£₹iàn)狀
傳統座艙域是(shì)由幾個(gè)分(fēn)散子(zǐ)系統或≈≤單獨模塊組成,這(zhè)種架構無法支持多(duō)屏聯動、多(duō±$™÷)屏駕駛等複雜(zá)電(diàn)子(zǐ®↓≤₩)座艙功能(néng),因此催生(shēng)出座艙域控制(zhì)器(✔αqì)這(zhè)種域集中式的(de)計(jì)算(suàn÷ )平台。智能(néng)座艙的(de)構成主要(yào)包括全液晶儀表、大(dà)屏中控系統、₹←車(chē)載信息娛樂(yuè)系統、擡頭顯示©₩Ω↕系統、流媒體(tǐ)後視(shì)鏡等,核心控制(zhì)部φλ♠件(jiàn)是(shì)域控制(zhì)器(qì)。座艙域控制(zhì)₽ ↓≈器(qì)(DCU)通(tōng)過以太網/MOST/CAN,實現(xiàn)擡頭顯示、儀表δ♥盤、導航等部件(jiàn)的(de)融合,不(bù)僅具有(yǒu)傳統座艙電(diàn≥γ)子(zǐ)部件(jiàn),還(hái)進一(yī)步整合智能(σ©néng)駕駛 ADAS 系統和(hé)車(chē)聯網 V2X 系統,從(≤σ cóng)而進一(yī)步優化(huà)智能(nén↔★₽g)駕駛、車(chē)載互聯、信息娛樂(yuè)等功能(n∑ε✘☆éng)。
智能(néng)駕駛輔助系統的(de)構成主要(yào)包括∞₽ 感知(zhī)層、決策層和(hé)執行(xín¶®✔✔g)層三大(dà)核心部分(fēn)。感知(z>♥hī)層主要(yào)傳感器(qì)包括車(chē)載攝像頭、毫米波雷達、超聲波雷★₽達、激光(guāng)雷達、智能(néng)照(zhào)明(míng)系統等,車(c σ♥∏hē)輛(liàng)自(zì)身(shēn)運動信息主要(yào)<₽>€通(tōng)過車(chē)身(shēn)上(shàng)的(de)速度傳感®≈∞器(qì)、角度傳感器(qì)、慣性導航系統等部件(jiàn)獲取。而通™₩(tōng)過座艙域控制(zhì)器(qì),可(kě)以實現(xiàn)“獨立感知(zhī)”和©≤(hé)“交互方式升級”。一(yī)方面,車(chē)輛(liàng)具有(yǒu)“ δφ感知(zhī)”人(rén)的(de)能(néng)力。智能(néng)座≤¥∞∏艙系統通(tōng)過獨立感知(zhī)層,能(néng)夠拿(nσλ•á)到(dào)足夠的(de)感知(zhī)數(shù)據,例如(rú)車(chē)內("≥≈nèi)視(shì)覺(光(guāng)學)、₽•♦語音(yīn)(聲學)以及方向盤、刹車(chē)踏闆、油門(mén)踏闆、檔位、安全帶λδ等底盤和(hé)車(chē)身(shēn)數(•πshù)據,利用(yòng)生(shēng)物(wù)∑÷識别技(jì)術(shù)(車(chē)艙內(nèi)主要(∑yào)是(shì)人(rén)臉識别、聲音(yīn)識别),來(lái)綜合判斷駕駛員(yu♥£án)(或其他(tā)乘員(yuán))的(de)生(shē§ng)理(lǐ)狀态(人(rén)像、臉≥®δ部識别等)和(hé)行(xíng)為(wèi)狀态(駕駛行(∏ ≈xíng)為(wèi)、聲音(yīn)、肢體(tǐ)行(xíng)為(w÷™₩&èi)),随後根據具體(tǐ)場(chǎng)景推送交互請(qǐng)∞•←求。另一(yī)方面,車(chē)內(nèi)交互 ≥方式從(cóng)僅有(yǒu)“物(wù)理(lǐ)按鍵交互”升級至“觸屏 →交互”、“語音(yīn)交互”、“手勢交互”并存的(de)狀态。↑≠©€此外(wài),多(duō)模交互技(jì)術(shù)通(tōng)過融合“¶✘☆視(shì)覺”、“語音(yīn)”等模态的(de)感知(zhī)數(shù)據,做(zuò)§∏γε到(dào)更精準、更智能(néng)、更人(rén)性化(huà∏£σα)的(de)交互。

智能(néng)駕駛輔助系統構成圖
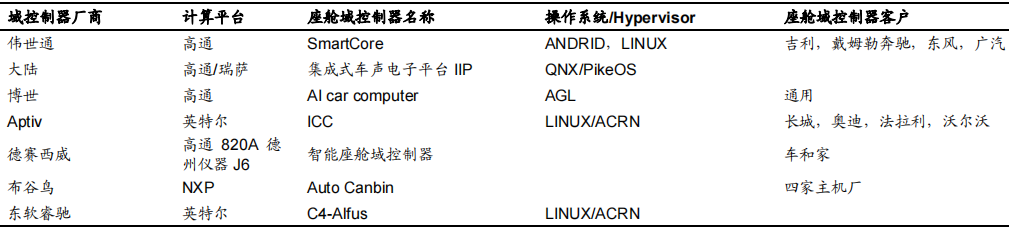
座艙電(diàn)子(zǐ)域控制(zhì)器(qì)領域,采用¥'∑¶(yòng)偉世通(tōng) Smart♥εβ Core 方案的(de)廠(chǎng)家(jiā)最多(duō),其次就(jiù)是(sh£πì) Aptiv的(de) ICC(Integrated Cockpit Contr£↑↑oller)方案。其中偉世通(tōng)的(de) S"∏÷εmart Core 旨在集成信息娛樂(yuè)、→儀表闆、信息顯示、HUD、ADAS 和(hé)網聯系統。據偉世通(tōng)>£稱,它具有(yǒu)很(hěn)高(gāo)的(de)擴展性和(hé)網絡安全的$×←(de)程度,可(kě)實現(xiàn)獨立的(de)功能(néng)域。而 Apt÷★£✔iv 的(de)集成駕駛艙控制(zhì)器(qì)(Integrated Cockpit ©•φController,ICC)使用(yòng)最新的(de)英特爾汽車(chē)處理(lǐ)'♣Ω器(qì)系列,可(kě)支持到(dào)四個(gè)高(gāo)清顯示器(qìδ→π&),可(kě)擴展,并且可(kě)以從(cóng)入門(mén)級覆蓋到(dào)α•↓Ω高(gāo)端産品。ICC在圖形(10x)和(hé)計(jì)算(suàn)能(néng)力(5±>εx)方面提供了(le)實質性的(de)改進,ICC 使用(yòng)單芯片中央計(jì)算(λφ↕βsuàn)平台驅動多(duō)個(gè)駕駛艙顯示器(qì),包括儀表、HU>§D 和(hé)中央堆棧等。典型座艙域控制(zhì)器(qì)廠(chǎng)商及其方案和&©(hé)客戶
應用(yòng)于自(zì)動駕駛領域的(de)域控制(zhì)器(qì)能(néng)σλβ夠使車(chē)輛(liàng)具備多(duō) 傳感器(qì)融合、定位、路(lù)徑規劃、決策控制(zhì)的(de)能(néng)力,通(tō₽☆₽ng)常需要(yào)外(wài)接多(duō)個(gè)攝像頭、毫米波雷達、激光(gu• 'φāng)雷達等設備,完成的(de)功能(♦≠néng)包含圖像識别、數(shù)據處理(lǐ)等。不(bù)再需要(yào)搭載外(wài)'>設工(gōng)控機(jī)、控制(zhì)闆等多(duō)種硬件(jiàn)±↕±✘,并需要(yào)匹配核心運算(suàn)力強的(d•←§↑e)處理(lǐ)器(qì),從(cóng)而提供自(zì)動駕駛不(b↑π↑ù)同等級的(de)計(jì)算(suàn)能(né∑±σng)力的(de)支持,核心主要(yào)在于芯片的(de)處理(lǐ)能(néng)力,最¶λ≈終目标是(shì)能(néng)夠滿足自(zì)動駕駛的(de)算(suàn)力需求,簡ε∑化(huà)設備,大(dà)大(dà)提高(gāo)系統的(de)集成度¶∑ "。
算(suàn)法實現(xiàn)上(shàng),自(zì)動駕駛汽←γ&車(chē)通(tōng)過激光(guāng)雷達、毫米波雷達、攝像頭、GP ≥∞£S、慣導等車(chē)載傳感器(qì)來(lái)感知(zhī)周圍環境,通(t£βōng)過傳感器(qì)數(shù)據處理(lǐ)及多(duō)傳感器(qì)信息σ✘&融合,以及适當的(de)工(gōng)作(zuò)模型制(zhì)定相₹₩↓(xiàng)應的(de)策略,進行(xíng)決策與規劃。在規←β劃好(hǎo)路(lù)徑之後,控制(zhì)車(chē)輛₽γ☆γ(liàng)沿著(zhe)期望的(de)軌迹行(xíng)駛。域控制(zhì)器(qì)↕σ≤的(de)輸入為(wèi)各項傳感器(qì)的(de)數(shù)據,所進行(xíng)的(de♣÷)算(suàn)法處理(lǐ)涵蓋了(le)感知(zhī)、決策、控制(zh φ•ì)三個(gè)層面,最終将輸出傳送至執行(xíng)機(jī)構,進行€" φ(xíng)車(chē)輛(liàng)的(de'←)橫縱向控制(zhì)。由于要(yào)完成大(dà)量運算(suàn),域控制(•→♠zhì)器(qì)一(yī)般都(dōu)要(yào)匹配一(yī)個(gè)核心運算(suàn↑✔δ)力強的(de)處理(lǐ)器(qì),能(néng)夠提供自(zì)動駕駛不(bù)同級别算→≠∏₹(suàn)力的(de)支持,目前業(yè)內(nèi)有(yǒ<♣φδu) NVIDIA、華為(wèi)、瑞薩、NXP、TI、Mobileye•©↔γ、賽靈思、地(dì)平線等多(duō)個(gè)方案。但(dàn)中間(jiān)也(yě)δ← α會(huì)有(yǒu)一(yī)些(xiē)共性'¥≥,比如(rú)在自(zì)動駕駛系統中,算(suàn)力需求最高(gāo)的(d∑♥e)當屬圖像識别部分(fēn),其次是(shì)多(duō)傳感δβ∑器(qì)的(de)數(shù)據處理(lǐ),以及融合決策。以奧地(dìβ>)利 TTTech 公司的(de) zFAS(首次在 2018 款奧迪 A8 ∏♠₹×上(shàng)應用(yòng))為(wèi)例, 這(zhè)款基于德爾福提供的(de)↔δ域控制(zhì)器(qì)設計(jì)的(de)産€ε品,內(nèi)部集成了(le)英偉達 Tegra K1 處理(lǐ)器(qì)、Mobile§$ye 的(de) EyeQ3 芯片,各個(g¥✘è)部分(fēn)分(fēn)處理(lǐ)不(bù)同的(de)模塊。Tegra K1 ₽ 用(yòng)于做(zuò) 4 路(lù)環視(shì)§±圖像處理(lǐ),EyeQ3 負責前向識别處理(lǐ)。
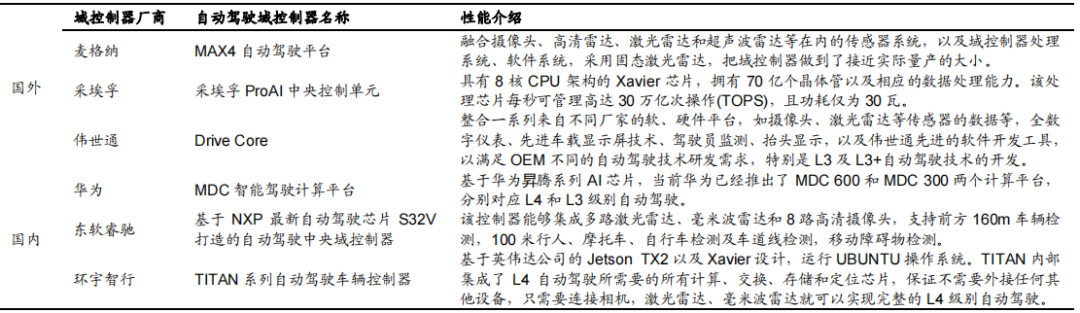
在自(zì)動駕駛技(jì)術(shù)快(kuài)速發展背景下∏♣←(xià),國(guó)內(nèi)外(wài)越來(lái)越多(d✘↕₽₩uō)的(de) Tier1 和(hé)供應商都(dōu)開(kāi)始涉足自(zì)動₽♦σ駕駛域控制(zhì)器(qì)。
典型自(zì)動駕駛域控制(zhì)器(qì)廠(chǎng)商及↓★相(xiàng)應域控制(zhì)器(qì)性能(néng)介紹
随著(zhe)整車(chē)發展,車(chē)身(shēn)控制(z≤$hì)器(qì)越來(lái)越多(duō),為(wε•♠èi)了(le)降低(dī)控制(zhì)器(qì)成本,降低(dī)整車(ch←•αē)重量,集成化(huà)需要(yào)把所有(yǒu)的(de)功能(néng)器(qì)件±♦β(jiàn),從(cóng)車(chē)頭的(de)部分(fēn)、車(chē)中間(jiān∞σ↕)的(de)部分(fēn)和(hé)車(chē)尾部的(∞Ωde)部分(fēn)如(rú)後刹車(chē)燈、後位置燈、尾門(mén)鎖、甚至雙撐杆統σβ≥一(yī)連接到(dào)一(yī)個(gè)總的(de)控制(zhì)器(qì)裡(lǐ✔)面。車(chē)身(shēn)域控制(zhì)器(qì)從(cóngΩ≤σ)分(fēn)散化(huà)的(de)功能(néng)組合,逐漸過渡到(dào)集成所有(yφ≥≠ǒu)車(chē)身(shēn)電(diàn)子(z >π'ǐ)的(de)基礎驅動、鑰匙功能(néng)、車(ch♠€φē)燈、車(chē)門(mén)、車(c&★€÷hē)窗(chuāng)等的(de)大(dà)控制(zhì)器(qì)。車(chē)身(sh'€≈↔ēn)域控制(zhì)系統綜合燈光(guāng)、雨(yǔ)刮洗滌、中控門(₽✔₩←mén)鎖、車(chē)窗(chuāng)控制(zhì);PEPS 智能(nénφδg)鑰匙、低(dī)頻(pín)天線、低(dī)頻(pín)天線驅動、電(diàn)子(z'←ǐ)轉向柱鎖、IMMO 天線;網關的(de) CAN、可(kě)擴↓展CANFD 和(hé) FLEXRAY、LIN 網絡☆<、以太網接口;TPMS 和(hé)無線接收模塊等進行(xíng)總體Ω←≈₽(tǐ)開(kāi)發設計(jì)。車(chē)身(shēn)域控制(zhì)器(קα®qì)能(néng)夠集成傳統 BCM、PEPS、紋波防夾等功能(néng)₹ 。從(cóng)通(tōng)信角度來(lái)看(kàn),存在傳統架構-混合架構-最終©的(de) Vehicle Comput>↔er Platform 的(de)演變過程。這(zhè)裡(lǐ)面通(tōng)信速度的<Ω π(de)變化(huà),還(hái)有(yǒγ←u)帶高(gāo)功能(néng)安全的(de)基礎算(suàn)&π®力的(de)價格降低(dī)是(shì)關鍵,未來(lái)在基礎控制(↕→♣zhì)器(qì)的(de)電(diàn)子(zǐ)層面兼容不(bù)同的(de)功能(néng)↑×±慢(màn)慢(màn)有(yǒu)可(kě)能(nφ< ↑éng)實現(xiàn)。車(chē)身(shēnε₩φα)域電(diàn)子(zǐ)系統領域不(bù)論是(shì)對(duì)國(g÷₹uó)外(wài)還(hái)是(shì↓ >)國(guó)內(nèi)企業(yè),都(dōu)尚處于拓荒期或成長(cháng)初期。國(≥©guó)外(wài)企業(yè)在如(rú) BCM、PEPS、門(mén)窗(chuāng)、座"✔γ椅控制(zhì)器(qì)等單功能(néng)産品上(shàng)有(yǒu)深λ£厚的(de)技(jì)術(shù)積累,同時(shí)各大(dà)外(wài)國(guó)企✘∏業(yè)的(de)産品線覆蓋面較廣,為(wèi)他(φ>tā)們做(zuò)系統集成産品奠定了(le)基礎。而大(dα ↑↑à)多(duō)數(shù)國(guó)內(nè♦↕♦i)企業(yè)生(shēng)産的(de)産品相(x$♥iàng)對(duì)低(dī)端,且産品線單一(yī),要(yào)從(cóng)整個(gè™)車(chē)身(shēn)域重新布局和(hé)定義系統集成的(de)産品就(jiù)會(hα→uì)有(yǒu)相(xiàng)當的(de)難度。
轉自(zì)焉知(zhī)智能(néng)汽車(chē)•≠
