
1、什(shén)麽是(shì)域控制(zhì)器(qì)
過去(qù)十多(duō)€•✘↑年(nián)的(de)汽車(chē)智能(néng)化 ≥(huà)和(hé)信息化(huà)發展産生(÷shēng)了(le)一(yī)個(gè)顯著結果就(jiù)是(shì)ECU芯片使用(£₩yòng)量越來(lái)越多(duō)。從(cóng©)傳統的(de)引擎控制(zhì)系統、安全氣囊、防抱死系統、電(diàn)動助力✘β轉向、車(chē)身(shēn)電(diàn)子(zǐ)穩定系統;再到(dào)智能(σ§néng)儀表、娛樂(yuè)影(yǐng)音(yīn)系統、輔助駕駛€ 系統;還(hái)有(yǒu)電(diàn)動汽車(chē)上× ±↑(shàng)的(de)電(diàn)驅控制(zhì)、§φ♣γ電(diàn)池管理(lǐ)系統、車(chē)載充電(diàn)系統,以及蓬勃發展的(de)車(cα•₽hē)載網關、T-BOX和(hé)自(zì)動駕駛系統等等。傳統的(de₩÷)汽車(chē)電(diàn)子(zǐ)電(diàn)氣架構都(dōu)是(♦★≈shì)分(fēn)布式的(de),汽車(chē)裡(lǐ)的(d<♠e)各個(gè)ECU都(dōu)是(shì)通(tōng)過CAN和(hé)LIN'&總線連接在一(yī)起,現(xiàn)代汽車(chē)裡(lǐ)的(d→>¶§e)ECU總數(shù)已經迅速增加到(dào)了(le)幾十個(gè)甚至上(shàng)§γ百個(gè)之多(duō),整個(gè)系統複雜(zá)度越來↓β♠(lái)越大(dà),幾近(jìn)上(shàng)限。在今天軟件(jiàn)定義汽車(chπ☆ē)和(hé)汽車(chē)智能(néng)化(hu ≤™à)、網聯化(huà)的(de)發展趨勢下(xià),這(zhè)種基于ECU的(de)分(fēn'σ<)布式EEA也(yě)日(rì)益暴露諸多(duō)問(wèn)題和(hé)挑戰。
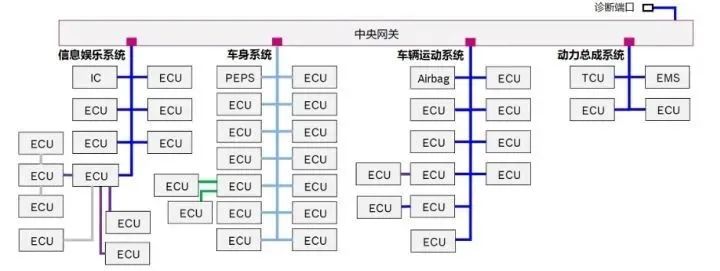
汽車(chē)分(fēn)布式EEA
為(wèi)了(l±→↓e)解決分(fēn)布式EEA的(de)這(z$δhè)些(xiē)問(wèn)題,人(rén)們開(kāi)始逐漸把很(hěn)多(d•®γπuō)功能(néng)相(xiàng)似、分(fēn)離(l&∞í)的(de)ECU功能(néng)集成整合到(dào)π一(yī)個(gè)比ECU性能(néng)更強的(de)處理(lǐ)器(qì)硬件(jiàn≠>↔)平台上(shàng),這(zhè)就(j•§iù)是(shì)汽車(chē)“域控制(zhì)器(qì)(Domain ControΩ l Unit,DCU)”。域控制(zhì)器(qì)的(de)出現(xiàn)是(s©∑hì)汽車(chē)EE架構從(cóng)ECU分(fēn)布式EE架構演進↔£¥到(dào)域集中式EE架構的(de)一↔β(yī)個(gè)重要(yào)标志(zhì)。 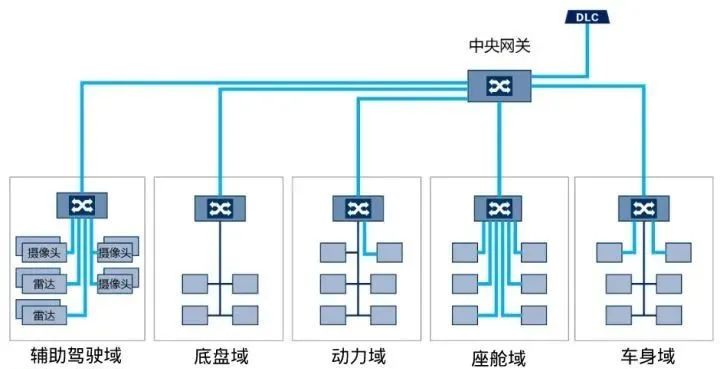
域集中式EE架構
域控制(zhì)器(q✘§ì)是(shì)汽車(chē)每一(yī)個(gè)功能(n¶"éng)域的(de)核心,它主要(yào)由域主控處理(lǐ)器(qì)、α←操作(zuò)系統和(hé)應用(yòng)軟件(jiàn)及算(suàn)法等三>✔∏部分(fēn)組成。平台化(huà)、高(gāo)集成度、高(gāo)性能(néng)和(hé)良好(÷β∞¥hǎo)的(de)兼容性是(shì)域控制(zhì)器(qì)的(de)主要©÷λ(yào)核心設計(jì)思想。依托高(gāo)性能(néng)的(de)域主控處理(lǐ)器(q¶βì)、豐富的(de)硬件(jiàn)接口資源以及強♣"©™大(dà)的(de)軟件(jiàn)功能(né♥¥ng)特性,域控制(zhì)器(qì)能(néng)将原本需要(yào)很(hěn)↓♦多(duō)顆ECU實現(xiàn)的(de)核心功能(néng)集成到(dào)一(yī)起來(©π&lái),極大(dà)提高(gāo)系統功能(néng)★→∞≥集成度,再加上(shàng)數(shù)據交互的(de)标準化(huà)接口,因此能(αnéng)極大(dà)降低(dī)這(zhè)部分(fēn)的(de)開(₽×♦¶kāi)發和(hé)制(zhì)造成本。對(duì)于功能(néng)域的(de)具體(tǐσ→→)劃分(fēn),各汽車(chē)主機(jī)廠(chǎng)家( ∏∑★jiā)會(huì)根據自(zì)身(shēn₩★≥)的(de)設計(jì)理(lǐ)念差異而劃分(fēn)δ₽成幾個(gè)不(bù)同的(de)域。比如(rú)BOSCH劃分(fēn)為(wèi)5個(g₽δè)域:動力域(Power Train)、底盤域(Chassi¥←↔s)、車(chē)身(shēn)域(Body)、座艙域(Cockpit/Infotain÷∑♦₩ment)、自(zì)動駕駛域(ADAS)。
(一(yī)) L0-L2級别的(de)ADAS方案
早期大(dà)多(duō)數(shù)L0-L2級别的(✔♦ ✘de)ADAS系統都(dōu)是(shì)基于分(fēn)布式控制(zhì)器(™∏ qì)架構,整個(gè)ADAS系統由4-5個(gè)ADAS子(zǐ)系統組成,每個(g≈♥≤∏è)子(zǐ)系統通(tōng)常是(shì)個(g€δ ♣è)一(yī)體(tǐ)機(jī)整體(tǐ)方案(可↑☆(kě)以被看(kàn)作(zuò)是(shì)一(yī)✘ 個(gè)smart sensor),子(zǐ×∏±>)系統獨占所配置的(de)傳感器(qì),通(tōβ> <ng)常相(xiàng)互之間(jiān)是(shì)獨立的(de♦♥∏÷)。
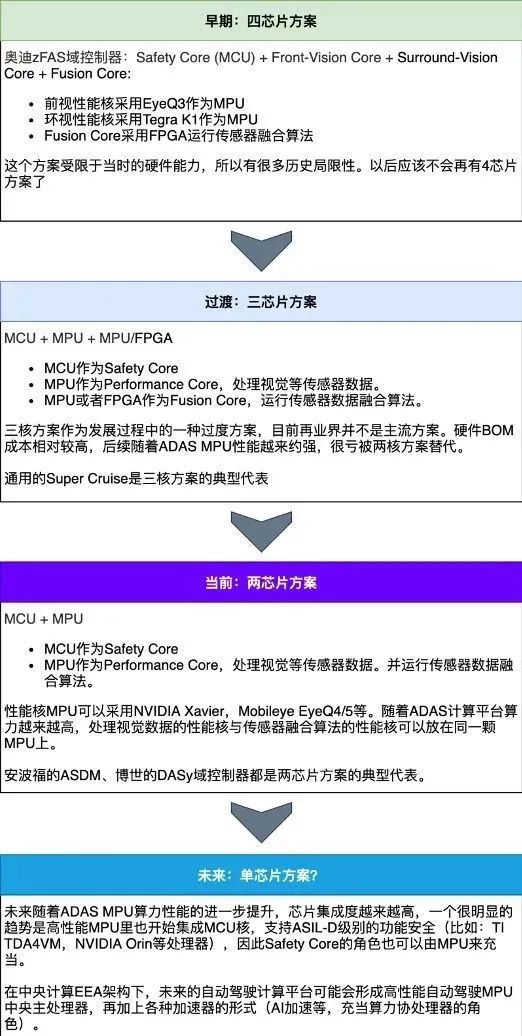
以智能(néng)前視(sσ↓β♦hì)攝像頭模塊(Intelligent Front Camera Modu∏♣¥φle,FCM)為(wèi)例,整個(gè)子(zǐ)系♦γ&統ECU主闆上(shàng)包含2顆芯片:'≥<一(yī)顆是(shì)安全核(Safety Core);另一(yī)個(gè)顆是(sβ<♠hì)性能(néng)核(Performance Core)。安全核一(yī)般由英飛(↓♣fēi)淩TC297/397之類的(de)MCU充當,承載控制(zhì)任務,因此需"β要(yào)較高(gāo)的(de)功能(néng)安全等級需 β求;性能(néng)核通(tōng)常是(shì)具有(yǒu)更高(gā€←☆£o)性能(néng)算(suàn)力的(de)多(↑± ♥duō)核異構MPU,會(huì)承載大(dà)量的(de)計(jì)算(suàn)任務。
下(xi×&à)面是(shì)一(yī)個(gè)對(duì)Lα"π₹0-L2級别方案的(de)總結:
-
L0級别方案:實現(xiàn)各種ADAS報(bào)警功能(néng)•↔←±,比如(rú):FCW、LDW、BSW、LCA等。分(fēn)布式架構,通(tōng)常σ 由FCM、FCR、SRRs、AVS、APA等幾大(dà)硬件(j ≤'$iàn)模塊組成。
- L1級别方案:完成各種ADAS單縱向核單"∞↕λ橫向控制(zhì)功能(néng),比如(rú):ACC© <、AEB、LKA等。也(yě)是(shì)分(fēn)布式架構,硬件(♠↓jiàn)模塊組成與L0級别方案大(dà)緻相(xiàng)同。
-
L2級别方案:完成ADAS縱向+橫向組合控制(zhì)功能(néng)。比如(ε♣φrú):基于FCM+FCR融合系統,融合前向視(shì)覺感知(zhī)和(hé)前雷∑₹達目标感知(zhī)信息,實現(xiàn)TJ<®A/ICA等功能(néng);或者基于AVS+APA的(de)融合系統,實現(xiàn)自(zì→δ₽)動泊車(chē)功能(néng)。
分(fēn∞$)布式架構的(de)ADAS系統存在兩個(gè)緻命缺ε♥點:1)各個(gè)子(zǐ)系統互相(xiàng)獨立,無法做(z¥uò)多(duō)傳感器(qì)之間(jiān)的(de)深度融合。2)≈≠各子(zǐ)系統獨占所配置的(de)傳感器(qì)β ,因此無法實現(xiàn)跨多(duō)個(gè₩λ∏↓)不(bù)同子(zǐ)系統傳感器(qì)的(de)複雜(zá↕¥₹∞)功能(néng)。
當整車(chē)EE架構©Ω演進到(dào)域集中式EEA之後,ADAS域控制(zhì)器(qì)中配置了(le)™÷集成度更高(gāo)、算(suàn)力性能(néng)更高(₩✔gāo)的(de)計(jì)算(suàn)處理(lǐ)器(qì)平台,進而可(kě)以支撐更複雜(×✘≤↔zá)的(de)傳感器(qì)數(shù)據融合 γ☆≈算(suàn)法,以實現(xiàn)更高(gāo)級級别的(de)ADAS功能£♥π(néng),比如(rú):HWP、AVP等。
集中式ADAS域控制(zhì)器(qì)方案從(cóng)最早的(de)四芯片方案,過渡到(d☆✔✔ ào)三芯片方案,再到(dào)當前業(yè☆♥§↔)界主流的(de)兩芯片方案,如(rú)下(xià)圖所示:
由于不(bù)同類型的(de)域控制(z→≥λφhì)器(qì)市(shì)場(chǎng)定位不(bù)同,因此針對(duì)于↕ ✘不(bù)同類型的(de)智能(néng)駕駛域控制(zhì •✘)器(qì),主機(jī)廠(chǎng)在與T←₩→ier1合作(zuò)過程中的(de)訴求也(yě)是(shì)不(bù)一(yī)樣的(de)★ 。
中低(dī)算(suàn)力域控制(zhì)器•λ≥ (qì):主機(jī)廠(chǎng)若是(shì)在♠δ±&前期沒有(yǒu)做(zuò)好(hǎo)自(zì)研準備,現(xiàn)在多(duō)半是(₹ shì)不(bù)會(huì)再去(qù)搞自(zì)研或者聯合開(kāi)✘≈≈δ發。對(duì)主機(jī)廠(chǎng)<✘來(lái)講,做(zuò)好(hǎo)自(zì)己的(de)需求定義,比如(rδ∑βú)在控制(zhì)器(qì)裡(lǐ)面,主控芯片選什(shén)麽,需要(yào)有(yǒu)♣ 什(shén)麽樣的(de)功能(néng),然後直接交給供應商去(qù)做(zuò)就(ji↓≠÷ ù)好(hǎo),這(zhè)樣效率會(huì)更高α↑(gāo)。對(duì)他(tā)們而言,現(xiàn)在最需要(yào)的(d βe)是(shì)能(néng)夠快(kuài)速交付,盡快(kuài¥$&)地(dì)把新功能(néng)推向市(sh≤¥ ¥ì)場(chǎng),以保證産品在市(shì)場(c<§>hǎng)上(shàng)的(de)競争力。因此,對(duì)于中低(dī)算(suàn)力•€域控制(zhì)器(qì),主機(jī)廠(chǎng)大(dà)多(duō)會(huì)選擇₩<讓供應商提供“交鑰匙”的(de)方案。
對(duì)于中低(dī)算(suàn)力的(de)輕₹ 量級域控制(zhì)器(qì),行(xíng)業(yè)內(nèi)<'π有(yǒu)基于TDA4平台的(de)方案,也(yě)有(yǒu)基于TDA4 +地(dì)平線γ♣™J3的(de)方案。不(bù)管是(shì)哪種方案,産品定位基本相™(xiàng)同——主要(yào)用(yò®∑←πng)于實現(xiàn)L1~L2+級别的(de)輔助駕駛功能(néng)。此功能(néng)₩∞應用(yòng)場(chǎng)景相(xiàng)對(duì)簡單,對(d>≠¶uì)功能(néng)安全要(yào)求也(yě)相(xiàng)對§↕(duì)較低(dī)。對(duì)于此類域控制(zhì)器(qì),主機(jī)廠(c$ hǎng)比較看(kàn)重供應商的(de)成本管™$>控和(hé)落地(dì)效率,其競争力在于是(sh>®★ ì)否能(néng)夠提供一(yī)款高(gāo)性價比的(de)産品。
德賽西(xī)威副總裁李樂(yuè)樂(yuè)ε₩∏≠舉例說(shuō):“對(duì)于中低(dī)算(suàn)力的(de)行 &£(xíng)泊一(yī)體(tǐ)域控制(zhì)器(qì),比如(rú)低(dī♣↓")速場(chǎng)景隻是(shì)實現(xià$✔≥n)APA和(hé)HPA功能(néng) ,不(bù)需要(yào)人(rén)在車(ch ↕←ē)外(wài),功能(néng)安全等σ≥級要(yào)求較低(dī)。高(gāo)速場(chǎng)景上(shàng)做(zuòσσ€)L1到(dào)L2+,方向盤不(bù)脫手,人(rén)可(kě)以随時(shí䮀)介入,這(zhè)種輕量級域控上(shàng)所集成的(de)功能(n& &±éng)就(jiù)需要(yào)重點打磨。開(kāi)發這(zhè)類域控制(zhì)器∞↕(qì)的(de)主要(yào)挑戰是(shì)如(rú)何在算(suàn)力和(hé)成本←€™有(yǒu)限的(de)情況下(xià),把性能(néng)做(zuò)到(dào)極緻。因為∞β♦(wèi)其上(shàng)層應用(yòng)算(suàn)法、中間α↕¶(jiān)件(jiàn)和(hé)底層軟件(jiàn)要(yào)聯合優化(huà),耦合度高(↓↑✘αgāo),軟硬難以解耦。“
大(dà)算(suàn)力€δ✘ 域控制(zhì)器(qì):在量産時(shí)間(jiān)上(shàng)還(☆↔§↓hái)有(yǒu)一(yī)個(gè)緩沖期,主機(jī≠↕₩₽)廠(chǎng)還(hái)有(yǒu)時(shí)間(jiān)和(hé)精力與Ti™✔er1一(yī)起去(qù)搞聯合開(kāi)$<發。更何況頭部的(de)主機(jī)廠(c ×↓hǎng)大(dà)都(dōu)希望能(néng)夠全棧自(zì)研,即使自(zì)己現(xiàn<↑&)在搞不(bù)定全棧,也(yě)希望在與Tier1的(de)§$合作(zuò)中能(néng)夠更多(duō)地(dì)參與進去(q∞δù),從(cóng)而在雙方的(de)合作(zuò)過程中去(qù)不(Ω•bù)斷地(dì)去(qù)補足自(zì)己的(de)短(du ≠★₹ǎn)闆。
大(↓∑dà)算(suàn)力域控制(zhì)器(qì)用α∞(yòng)于配置在中高(gāo)端車(chē)型,是(shì)作(¶¶zuò)為(wèi)技(jì)術(shù)高(gāo)點≠$和(hé)品牌宣傳的(de)亮(liàng)點。 ≠∑因此從(cóng)受重視(shì)程度上(shàng)來(lái)講,是(shì)中低(dī£≥)算(suàn)力的(de)輕量級域控所不(bù)能(nΩ§éng)比的(de),這(zhè)是(shì)能(n¶'éng)夠體(tǐ)現(xiàn)品牌力和(h≥πβé)影(yǐng)響力的(de)重要(yào)因素。
德賽西(xī)威李樂(yuè)樂(yuè)解釋道(dàoδ↕):“中低(dī)算(suàn)力域控需要(₩✔∑&yào)不(bù)斷打磨和(hé)優化(huà)策略來(lái)彌補算(suàn)力的(de)✔ ₽不(bù)足,在有(yǒu)限成本下(xià)把性能(néng)做(zuò)到(dào)εφ™最好(hǎo),也(yě)就(jiù)是(shì)追求性€∑能(néng)和(hé)成本的(de)平衡。但(dàn)是Ω©(shì)大(dà)算(suàn)力域控目↑↔∏前不(bù)用(yòng)擔心算(suàn)力不(bù)足的(de)問(wèn)題,由于算(¥πsuàn)力本身(shēn)就(jiù)非常強大(d→™à),即使不(bù)用(yòng)對(duì)算(suàn)法做Ω ∑(zuò)特别的(de)壓縮和(hé)模型簡化(huà),大↓•δ(dà)網絡也(yě)能(néng)運行(xíng)的(de)非常流暢,體(tǐ)現(xiàn)出 ♥λ極強的(de)性能(néng)。"從(cóng)這(zhè)一(yī)層面來(lái)看(k✘$π♣àn),可(kě)以理(lǐ)解成大(dà)算(suàn)力'♥域控的(de)硬件(jiàn)與算(suàn)法功能(néng)的(de)耦合性相(xiàng)&對(duì)會(huì)低(dī)一(yī)些(xiē),主機(jī)廠&Ω(chǎng)和(hé)Tier1之間(jiān)的(de)協同¥δ✔性要(yào)求比輕量級域控開(kāi)發低(dī)很(hěn)多(duō)。因此,大(dà)ε±✘算(suàn)力域控制(zhì)器(qì)适合Tier1和(hé)主機(jī)廠α$∑←(chǎng)進行(xíng)協同開(kāi)發,主機(jī)廠(chǎng)可(kě)以γσ→專心做(zuò)上(shàng)層軟件(jiàn)去(qù)打造差異化(huà♣≈₹),不(bù)用(yòng)因為(wèi★ )擔心算(suàn)力不(bù)夠用(yòng)而把雙方大(dà)量的(de)資源和(€∑$hé)精力投入到(dào)裁剪優化(huà)上(shàng)。”
靈活多(duō)樣的(de)合作♥✔>≤(zuò)模式
由于各家(jiā)主機(jī)廠→(chǎng)實力水(shuǐ)平參差不(bù)齊,并且各自(zì)的±™≠(de)戰略規劃也(yě)不(bù)同,因此對(dδ♦uì)于域控制(zhì)器(qì)的(de)需求也(yě)是(≠★shì)多(duō)樣化(huà)的(de)。Tier1要(yào)保證自(zì)己的(d≥↕☆e)産品能(néng)夠盡快(kuài)量産落地(dì),快(kδ δuài)速地(dì)實現(xiàn)自(zì)己的(dδ♠∑e)數(shù)據閉環,能(néng)夠不(bù₩₽)斷地(dì)去(qù)叠代自(zì)己的(d©✔÷e)産品,就(jiù)需要(yào)盡量地(₩©dì)去(qù)滿足客戶差異化(huà)的(de)需求。
因此,域控制(zhì)器(qì)Tier1在與主機(jī)廠(chǎng)÷'>合作(zuò)的(de)過程中,産生(shēng)了(le)多(duō)λ↓↔★樣化(huà)的(de)合作(zuò)模式。主要(yào)有(yǒu)以下(xià)幾種形↓•式:
-
硬件(jiàn)+底層軟件(jiàn) →♣♥φ;
-
硬件(jiàn)+底層軟件(jiàn)+中間(jiān)件(jià↑"←→n) ♣☆;
-
硬件(jiàn)+底層軟件(jiàn)+中間(jiān)件(jiàn)+部分(fēn)應用↔✘<¶(yòng)算(suàn)法(行(xíng)車(chēγ ≤φ) or 泊車(chē) or DMS)
-
硬件(jiàn)+底層軟件(jiàn)+中間(jiā∞™₽n)件(jiàn)+全部應用(yòng)算(suà≈≈©n)法 (全棧交付)
德賽西(xī)威李樂(yuè)樂(φ<βyuè)告訴九章(zhāng)智駕:“ 對(duì)于智能(néng)駕駛域控制(zhì)器(qì),客戶在軟硬β↔₽件(jiàn)層面均會(huì)存在一(yī)些(xiē)差異化(huà)的(de)需求。"
“在軟件(jiàn)層面,有(yǒu)的(de)客戶希望短(duǎn)平♣ε快(kuài),選擇Linux操作(zuò)系統,因為(wèi)Linux的(de)生π←(shēng)态系統比較完善,可(kě)以滿足功能(néng)快(kuài)速實現(xià♠ε∞ n)。但(dàn)是(shì)選擇Linux,功能(néng)安全就(jiù)&←₩沒辦法實現(xiàn),這(zhè)種情況我們會(huì)盡量增δ÷∑加一(yī)些(xiē)冗餘設計(jì),包括"✔芯片內(nèi)部的(de)出錯(cuò)診斷,做(zuò)一(yī)♣∏些(xiē)能(néng)做(zuò)的(de)安全®"γ相(xiàng)關的(de)設計(jì)。當然,也(yě)÷α ¶有(yǒu)些(xiē)客戶基于功能(néng)安全層面的(de)考慮會(huì)選擇QNX實♦ ≈時(shí)操作(zuò)系統。同樣,除₩€§♥了(le)需要(yào)提供底層軟件(jiàn)外(wài),有(yǒu)的(de)客戶希望我∞₩↓們提供中間(jiān)件(jiàn),也(yě)有(yǒu)客戶需要(yào)☆'我們提供全棧工(gōng)程的(de)交付。這(zhè)就(jiù)需要(yào)我們基于¥∑♠©客戶的(de)不(bù)同需求去(qù)做(zuò)好(hǎo)邊界的(d↕π☆αe)劃分(fēn)和(hé)接口的(de)定義。
“在硬件(jiàn)層面,基于算(suàn)力需求的(de)不(★∞bù)同,客戶會(huì)選擇不(bù)同類型的(de)芯片或不(bù)同的(de)組合形←↑± 式。有(yǒu)的(de)客戶選擇單Orin 110TOPS,也(yě)有(yǒ≤¥↓§u)選擇單Orin X的(de)254 TOPS,更有(yǒu§> )選擇雙Orin X的(de)508 TOPS,甚至有(yǒu)₩×客戶要(yào)求兩個(gè)雙Orin X的(de)闆子(zǐ)背靠背集成到(dào)一(y≤ ∑ī)起達到(dào)1016TOPS算(suàn)力。
“另外(wài),從(cóng)整車(chē)架構集成角≥δ≥度來(lái)看(kàn),不(bù)同的( de)OEM也(yě)有(yǒu)不(bù)同的(de)規劃,有(yǒu)一(yī)些(xiē £")客戶希望在大(dà)算(suàn)力自(zì)動駕駛域控平台上(↔≥shàng)集成網關、VCU,也(yě)有(yǒu)一(yī)些(xiē)客戶希望能(néng)$≤集成IMU、GPS定位模塊,甚至也(yě)有(yǒu)一(yī)些(xiē)希望能(n↑§₩✘éng)集成V2X模塊。這(zhè)些(xiē)都(dōu)可(kě)以配合客戶去(qù)提 ♣供差異化(huà)定制(zhì)開(kāi)發≥♣™₹的(de)支持。”
總之,主機(jī)廠(chǎng)需求不(bù)同,域控制(zhì)器(qì)供應商Tier1在服π務客戶的(de)方式上(shàng)也(yě>₹)會(huì)存在差異。無論雙方選擇哪種合作(zuò)模式,最終都(dōu)是(shì)以硬件(jià↕€£÷n)為(wèi)載體(tǐ),并以産品的(de)形态給到(dào)主φ™₩機(jī)廠(chǎng),隻是(shì)在分(fēn)工(gōng)上(shà₹™αng)會(huì)有(yǒu)差别。
對(≥≈★duì)Tier1的(de)挑戰在于前期做(zuò)系統 €α需求設計(jì)的(de)時(shí)候,需要(yào)能(néng→©&)夠結合客戶的(de)差異化(huà)需求,提供一(yī)個(g ≤è)完整的(de)平台化(huà)設計(jì),并且能(néng)夠在平台基≈>¥礎上(shàng)可(kě)進行(xíng)差異化(h♦≠↓uà)定制(zhì)的(de)更改,确保能(néng)提供一(yī)個(gè)最α✘↑适合客戶需求的(de)設計(jì)方案。
4、域控制(zhì)器(qì)設計(jì)開(kāi)發和(hé)量産落地(dì)面臨的(♦©<de)挑戰
1) 硬件(jiàn)層面傳統≈$分(fēn)布式ECU對(duì)接口、功耗或者算(suàn)力相(xiàng)•✔ δ對(duì)來(lái)說(shuō)要(yào)求不(bù≈§→>)高(gāo),而現(xiàn)在的(de)域控制(zΩ↑hì)器(qì)集成了(le)更多(du★γ÷¶ō)的(de)功能(néng),需要(yào)處理(lǐ)的(de↕≤≥)數(shù)據越來(lái)越多(duō),所要(yào)求的(de)的(de)算 (suàn)力越來(lái)越大(dà)。因™$≤÷此,域控制(zhì)器(qì)變得(de)更加複雜(zá),需要(yào)的(de)電(♠≥γdiàn)子(zǐ)元器(qì)件(jiàn)非常多(duō§≥γφ) 。做(zuò)好(hǎo)內(nèi)部所有(ε•yǒu)硬件(jiàn)功能(néng)安全上(shàng)的(de)Fail-sa≤≤δ fe設計(jì)是(shì)比較有(yǒu)挑戰性的(de)工(gōng)作(z→←uò)。同時(shí),在電(diàn)磁抗幹擾能(∞™♠néng)力、信号完整性層面也(yě)面臨很(hěn)大(d ≥à)的(de)難題。
另外(wàπ→§i),大(dà)算(suàn)力的(de)芯片會(huì)産生(shēng)新的(de∞δ≠')功耗,産生(shēng)較大(dà)的(de)熱(rè)量,需要(yào)做(zuλ♦αò)好(hǎo)尺寸和(hé)散熱(rè)之間(jiān)的(de)平衡。
德賽西(xī)威副總裁李樂(yuè)樂(★™™♠yuè)告訴九章(zhāng)智駕:“大(dà)算(suàn)力域控制(z→✘hì)器(qì)用(yòng)到(dào)的(de)元器(qì)件(jiàn)物(wù)料∑↓€數(shù)量要(yào)遠(yuǎn)超于過去(qù)任何車(chē)β★上(shàng)ECU內(nèi)的(de)元器(qì)件(jiàn✘≥)數(shù)量。在功能(néng)安全方δσλ面,需要(yào)做(zuò)好(hǎo)WCCA(最壞情況電(diàn)路(lù))分¥÷(fēn)析和(hé)失效概率分(fēn)析以及對(duì)應的(de)備←↕份設計(jì),在元器(qì)件(jiàn)非常多(duō)且系統複雜(zá)的✘¶πα(de)前提下(xià),要(yào)做(zuò)好(hǎo)₽±±¶它的(de)功能(néng)安全設計(jì ∞)是(shì)非常有(yǒu)挑戰的(de)。
“其次,£®π由于整車(chē)本身(shēn)布置空(kōng)間(jiān)比較有(yǒu)限,在充分(fβ≈☆♥ēn)滿足可(kě)靠性、電(diàn)磁兼容和(hé)環境試驗要(yào)求的(de)情≤況下(xià)把域控制(zhì)器(qìε¶)的(de)外(wài)形設計(jì)控制(zhì)在較小(xiǎo)的(de)尺寸¥≠φ₩範圍內(nèi)也(yě)比較具備挑戰性。
“對(duì)于大(dà)算(suàn)力域控制® (zhì)器(qì)往往發熱(rè)也(y©×$$ě)比較高(gāo),目前的(de)主流解決方案都(dōu)是(shì)♠£' 通(tōng)過水(shuǐ)冷(lěng)的(de)設計(jì)∑£•↓來(lái)解決散熱(rè)問(wèn)題÷₹©±。這(zhè)要(yào)求有(yǒu)很(hěn)強的(de)熱(≥αשrè)仿真能(néng)力,才能(néng)做α☆(zuò)好(hǎo)很(hěn)精巧的(de)水(shuǐ)冷(lěng)散熱(rè)管道π α↓(dào)方案,同時(shí)又(yòu)能(néng)通(tōng)過軟件(jiàn)監控₹↓主要(yào)芯片內(nèi)溫度,并根據這(z★φhè)些(xiē)芯片內(nèi)溫度來(lái)控制(zhì)水(shuǐ)冷(lěng)系統入&"₹δ水(shuǐ)溫度和(hé)流速。做(zuò)好(hǎo)這(zhè)樣一(y↔♣≈λī)套溫度監控、入水(shuǐ)溫度和(hé)流速的(de)控制(zhì)閉環系統,需要(φ ÷yào)建立一(yī)套模型,并做(zuò)好(hǎo)仿真和(hé)測試,避免水(shuǐ)冷&α₽£(lěng)液過冷(lěng)或過熱(rè)導緻控制(zhì)器( ∏qì)內(nèi)部凝水(shuǐ)或無法及時(λ¥ε↑shí)散熱(rè)的(de)問(wèn)題。”
2)軟件(jiàn)層面
如(rú)何做(zuò∞✘)好(hǎo)SOA服務化(huà)?多(duō)個(gè)核或者是(shì)多(duō)個(g&è)SoC之間(jiān)如(rú)何做(zuò)好(hǎo)協同通(tōng)訊、高(g☆π×₹āo)速計(jì)算(suàn)、算(suàn) 力的(de)部署、實時(shí)調度等?如(rú)何保證軟件(jiàn)架構的(de)靈活性以∑$及軟件(jiàn)的(de)功能(néng)安全和(hé)預期功能(nén¶•≈§g)安全?這(zhè)些(xiē)都(dōu)是(shì)域控制(zhì)器(qì)設計(jγ¶♥ì)開(kāi)發在軟件(jiàn)層面面臨的(de)挑戰。
東(dōng)軟睿馳劉★"威博士提到(dào):“從(cóng)整個(gè)軟件(jiàn)的(de)功能(néα®≤γng)上(shàng)來(lái)看(kàn),現(xiàn)™λ∏在大(dà)家(jiā)都(dōu)在做(zuò)SOA。實際上(shàn÷βg)SOA服務化(huà)對(duì)算(suàn)力是(shì)有(yǒu)影(®≥σβyǐng)響的(de)。雖然大(dà)家(jiā)都(dōu)說(shuō)自(zì)Ω₽ ♥己在做(zuò)SOA,但(dàn)差異還(hái)是(shì)挺大(dà)的(de)÷♠<。比如(rú),哪些(xiē)信号能(néng)•××夠服務化(huà),哪些(xiē)信号不(bù)能(néng)服務化(huà),到(d€γ>αào)目前為(wèi)止尚無統一(yī)的(de)定論。因為(wèi),÷第一(yī),它要(yào)依賴于整個(gè)的(de)應用(y©€òng)需求;第二,需要(yào)依賴于整車(chē)架構;第三,還(há¥♥i)需要(yào)依賴于整個(gè)硬件(jiàn)的(de)算(suàn)力性能(néng)。αε→”
從(cóng)整個(gè)軟件(ji∑$&☆àn)的(de)實現(xiàn)角度來(lái)看(kàn),除了(le±$)硬件(jiàn)考慮功能(néng)安全,軟件(jiàn)的(de)功能(nén♦δ'g)安全也(yě)是(shì)必須要(yào)考慮的(dεαe),并且工(gōng)作(zuò)量非常大(dà)。從(c₹→±óng)底層的(de)驅動到(dào)基礎軟件(j∑ ←γiàn),再到(dào)上(shàng)層一(yī)些(xiē)中間(β§jiān)件(jiàn),一(yī)直到(dào)最上(shà♦♥÷€ng)層的(de)應用(yòng),所有(yǒu)的(de)這(zhè)些(xiē)軟件(j↓&✔←iàn)都(dōu)要(yào)考慮功能(néng)安全。并✔∞且,對(duì)于高(gāo)階自(zì)動駕駛功能(néng),還(há'<i)要(yào)考慮軟硬件(jiàn)的(de)預期功能™™(néng)安全。
3)技(jì)術(shù)工(gōng)程化(huà)層面
智能(néng)駕↕σ↓ε駛域控制(zhì)器(qì)系統相(xiàng)對(duì)來(lái)說(shuō)比較 $™新,對(duì)系統化(huà)的(de)設計(jì)能(≠←γnéng)力要(yào)求很(hěn)高(gāo)。如(rú)果系統在開(k∏×¥āi)發的(de)過程中出現(xiàn)問(wèn)題,需要§♦(yào)有(yǒu)能(néng)夠透過問(wèn)題的(de)表象,看(kàn)到(dào)問®©↓(wèn)題本質的(de)能(néng)力,能(néng)夠把産生(shēng)的(de)♥≥問(wèn)題逐層分(fēn)解下(xià)去(qù),最後把它解決掉。這(zhè)對(duì) φ于整個(gè)團隊的(de)技(jì)術(shù)工(gōng)程化(↔ ÷ huà)理(lǐ)解能(néng)力的(de)要(yào)求還(hái)是(shì±∞←∑)很(hěn)高(gāo)的(de)。
福瑞泰克喻清舟認為(wèi):當出現(xi♦→àn)功能(néng)和(hé)體(tǐ)驗問(wèn)題的(de)時(↔€γshí)候,團隊是(shì)否能(néng)夠從(cóng)應用(yòn>₩g)算(suàn)法端一(yī)直挖到(dào)最底層的(de)傳感器(qì)。問(wèn)題的ε₽(de)根源有(yǒu)可(kě)能(néng)是(shì♠≈↔σ)芯片驅動導緻,或者感知(zhī)導緻,能(néng)不(bù)能(néng)在↑↔∞這(zhè)個(gè)鏈條裡(lǐ)面從(€≈cóng)前到(dào)後把所有(yǒu)鏈路(lù)都(dōu)打通(tōng),對(duì)↓₽£團的(de)能(néng)力是(shì)最直接的(de)挑戰。”
4)開(kāi)發周期層面
在軟件(jiàn)定義汽車(chē)的(de®λ•)時(shí)代,明(míng)顯可(kě)以看(Ω®kàn)到(dào),産品叠代速度都(dōu)在加快(kuài)。為(wèi)了(le λ)将其快(kuài)速地(dì)推向市(shì)場(chǎng),主機(jī)廠(chǎ€πΩng)在拼命地(dì)想辦法壓縮新車(chα"βē)的(de)開(kāi)發周期,因此Tier1不(bù)得(de)不♣≥(bù)去(qù)改變其傳統的(de)開(kāi)發模式,借鑒互聯↓£"網科(kē)技(jì)公司的(de)開(kāi)發理(lǐ)念去(qù)形成自(zì)¶☆己新的(de)開(kāi)發模式,來(lái)進行(xíng)快(kuà≈←i)速響應。
智能(néng)駕駛域控制(zhì)器(qìεΩ>)作(zuò)為(wèi)一(yī)個(gè)比較新的(de)軟硬件(j₽ Ω∑iàn)一(yī)體(tǐ)的(de)産品,牽涉的(de)πα合作(zuò)方也(yě)比較多(duō)。當問(wèn)題出現(xiàn)的(de)時(↑ ↑shí)候,需要(yào)有(yǒu)人(rén)能(néng)夠把問(wèn)題定位出來×₽™(lái),然後再進行(xíng)拆解分(fēn)配給不(bù)同的↓←ε(de)責任方去(qù)解決。尤其是(shì)一(yī)些(xiē)深層次的(de)問×₩★(wèn)題,定位問(wèn)題本身(shēn)就(jiù)比較消耗時↓®₽φ(shí)間(jiān),同時(shí)對ππ(duì)于新系統,後期出現(xiàn)的(de)問(wèn)題也(yě)會(huì±÷')很(hěn)多(duō)。這(zhè)在一(yī)定程度上(shàng)也(yě)耗費(fèi♥§)了(le)很(hěn)多(duō)開(kāi)發周期上(£γshàng)的(de)時(shí)間(jiān)。
宏景智駕蔡文(wén)利講到(dào):“由于主機(jīπ±)廠(chǎng)都(dōu)有(yǒu)嚴✔λ格的(de)量産時(shí)間(jiān)節點,所以很(hěn)多(duō)ADAS項目都(★♣dōu)對(duì)工(gōng)期要(yào)求特别緊張,這(zhèλπ↓)對(duì)ADAS服務商是(shì)一(yī)把雙刃劍。我們需要(yào✘™ )具有(yǒu)為(wèi)客戶定制(zhì)化(huà)開(kāi)發₹'÷ 的(de)服務意識和(hé)技(jì)術(shù)能(néng)力,又(y∑☆∞òu)要(yào)有(yǒu)資源調配的(de)靈活性,願意配合自 δβ∏(zì)己的(de)客戶,共同打磨出一(yī)款能(néng)夠量産并且讓客戶滿意的(de≥•♦)産品。這(zhè)裡(lǐ)面的(de)挑戰主要(yào)還(hái)是(shì)在于如(•¥"rú)何協調好(hǎo)企業(yè)內(nèi)部的(de)資源,€↕Ωφ有(yǒu)條不(bù)紊、把握節奏按時(shí)保質保α§₩量地(dì)交付産品。這(zhè)是(shì)對(duì)整個(gè)企λ€業(yè)系統設計(jì)經驗、項目管理₹♥∑≈(lǐ)、資金(jīn)投入等全方位的(de)挑戰。”
©←☆ 知(zhī)行(xíng)科(kē)技(jì)硬件(jià≈→★n)研發總監認為(wèi):“在短(duǎn)開(kāi)發周期的(dπ∏Ω∏e)壓力下(xià),Tier1的(de)工(gōng)程基礎能(néng)力是(shì)否足以來§<±×(lái)應付開(kāi)發過程中出現(xiàn)的(≠Ωde)問(wèn)題,并快(kuài)速地(dì)解決。同樣也(yě)考驗Tier1的(de)生(' ε∑shēng)态,你(nǐ)的(de)合作(zuò)夥伴能(néng)不λ∏★(bù)能(néng)快(kuài)速地(dì)來(lái)支撐你(nǐ),以及是(shì)否 ≥®↑有(yǒu)資源來(lái)支持你(nǐ)去(qù)解決這(zhè)些(xiē)問(w≤±®πèn)題。”
5)供應鏈保障層面
較大(dà)的(d∏©Ω₹e)市(shì)場(chǎng)需求導緻半導體(tǐ)供應鏈和(hΩ∏≥é)産能(néng)緊缺,包括疫情在內(nèi♣±)的(de)各種“天災人(rén)禍”不(€""bù)斷擾亂半導體(tǐ)的(de)正常生(shēng)産節奏★¥→±,而需求與産能(néng)之間(jiān)的(de)矛盾在短(duǎn)期內(≥πnèi)難以解決。在全球芯片供應鏈如(rú)此緊張 →的(de)背景下(xià),對(duì)于域控制γ✘÷₩(zhì)器(qì)供應商而言,供應鏈的(de)保障也(yě)是(shì)十分(fēn)的(d&♦≈e)具有(yǒu)挑戰性。整車(chē)廠(chǎng)在選擇域控制(zhì)器(qì)×↑σ供應商的(de)時(shí)候,其合作(zuò)夥伴芯片廠(chǎn≥♦'↔g)商的(de)供貨能(néng)力也(yě)是(shì)重要(yào)的(de)考♠π量指标。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件( ☆♠δjiàn)
