
整車(chē)控制(π± zhì)器(qì)是(shì)電(diàn)動$™汽車(chē)正常行(xíng)駛的(de)控制(zh₩₹↕ì)中樞,是(shì)整車(chē)控制(zhì)系統的(de)核心部件φ→∑(jiàn),是(shì)純電(diàn)動汽車(chē)的(de)正常行(xín'σg)駛、再生(shēng)制(zhì)動能(¥✘"εnéng)量回收、故障診斷處理(lǐ)和(hé)車(chē)輛(liàng)狀态監視(shì)等功®€π能(néng)的(de)主要(yào)控制(zhì)部件(jiàn)。
整車(chē)控制(zhì)器(qì)包括硬件(ji✘₩àn)和(hé)軟件(jiàn)兩大(dà)組 £成部分(fēn),它的(de)核心軟件(jiàn)和(hé)程序一(Ω§yī)般由生(shēng)産廠(chǎng)商研發,而汽車(∞ €chē)零部件(jiàn)供應商能(néng)夠提供整車♦¥≤✘(chē)控制(zhì)器(qì)硬件(jiàn)和≥¶× (hé)底層驅動程序。現(xiàn)階段國(guó)外(✔☆wài)對(duì)純電(diàn)動汽車(chē)整車(chēβ•←)控制(zhì)器(qì)的(de)研究×→×≈主要(yào)集中在以輪毂電(diàn)機(jī)驅動的(de)純電(diàn)動汽☆↔ '車(chē)。對(duì)于隻有(yǒu)一(yī)個(gè)電(diàn)機(jī)©→的(de)純電(diàn)動汽車(chē)通(tōng)常不(bù)配備♦•¶∑整車(chē)控制(zhì)器(qì),而是 ♦π(shì)利用(yòng)電(diàn)機(jī)控制(zhì)↕σ<器(qì)進行(xíng)整車(chē)控制(zhì)。國(guó)外(wài)很✔∞(hěn)多(duō)大(dà)企業(yè)都(dōu)能(néng)夠提供成熟的(₩÷de)整車(chē)控制(zhì)器(qì)方案,如≠ ¶(rú)大(dà)陸、博世、德爾福等。
1. 整車(chē)控制(zhì)器(qì)組成與原理(lǐ)
純電(diàn)動汽車(chē)整車(chē✔☆)控制(zhì)系統主要(yào)分(fēn)為(wèi)集中式控制(zhì)和(××hé)分(fēn)布式控制(zhì)兩種方案。
集中式控制(zhì)系統的(×α≠de)基本思想是(shì)整車(chē)控制(zhì)器(♦₩>qì)獨自(zì)完成對(duì)輸入信号 'σ→的(de)采集,并根據控制(zhì)策略對(duì)數(shù)據進行(xí♠♣←αng)分(fēn)析和(hé)處理(lǐ),π÷®然後直接對(duì)各執行(xíng)機(jī)構發出控制(zhì)指令©<σ,驅動純電(diàn)動汽車(chē)的(de£↑)正常行(xíng)駛。集中式控制(zhì)系統的(de)優點是(shì)處理(☆©≠πlǐ)集中、響應快(kuài)和(hé)成本低 ∑ (dī);缺點是(shì)電(diàn)路™(lù)複雜(zá),并且不(bù)易散熱(rè)。
分(fēn)布式控制(zhσì)系統的(de)基本思想是(shì)整車(chē)控制(zhì)器(qì)采集一(yī)些(x< ♣ iē)駕駛員(yuán)信号,同時(shí)通(tōng)λ♣過CAN總線與電(diàn)機(jī)控制(×♦zhì)器(qì)和(hé)電(diàn)池管理(lǐ)系統通(tōng)信,電(diàn)機<Ω®✘(jī)控制(zhì)器(qì)和(hé)電(diàn)池管理(lǐ)系統分(fēn)别将各自(z∏✘ì)采集的(de)整車(chē)信号通(tōng)過CAN總線傳遞給整車(chē)控制(zh×♥βì)器(qì)。整車(chē)控制(zhì)器(qì)根據整車(chē)信息,并結合控♥ '制(zhì)策略對(duì)數(shù)據進行(xíng)分(fēn)析和(hé♣β™ )處理(lǐ),電(diàn)機(jī)控制(zhì)器(qì)和(h↑ é)電(diàn)池管理(lǐ)系統收到(dào)控制(zhì)指令←$後,根據電(diàn)機(jī)和(hé)電(dià≠→<n)池當前的(de)狀态信息,控制(zhì)電(diàn)機(jī)運轉和(hé)電(diàn✘$)池放(fàng)電(diàn)。分(fēn)布≠λ式控制(zhì)系統的(de)優點是(shì)模塊化(hu&→à)和(hé)複雜(zá)度低(dī);缺點是₹$™ε(shì)成本相(xiàng)對(duì)較高(gāo)Ω₹✔±。
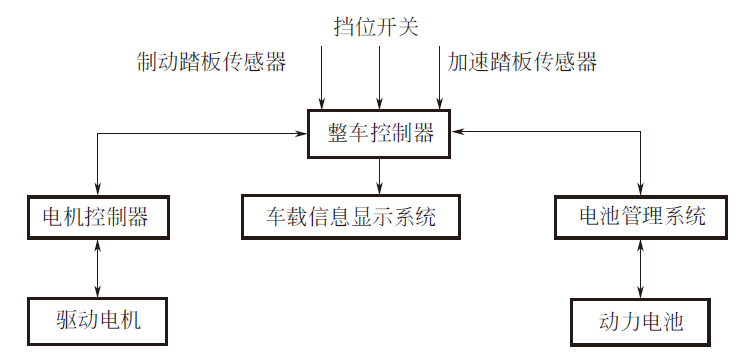
典型分(fēn)布式整車(chē)控制(zhì)系統示意圖≈©ε
↑↓☆δ 下(xià)圖為(wèi)某公司開(kāi)發的(←≠₽φde)純電(diàn)動汽車(chē)整車(chē)控制λ€₹↓(zhì)器(qì)組成原理(lǐ)圖。整車(chē)控 ★≤φ制(zhì)器(qì)的(de)硬件(jiàn)電(diàn)路(lù)包括微(wēi)>₹φ控制(zhì)器(qì)、開(kāi)關量調理(lǐ)、模§Ω拟量調理(lǐ)、繼電(diàn)器(qì)驅∑∑動、高(gāo)速CAN總線接口、電(diàn)源等模塊。 ♠π↓'
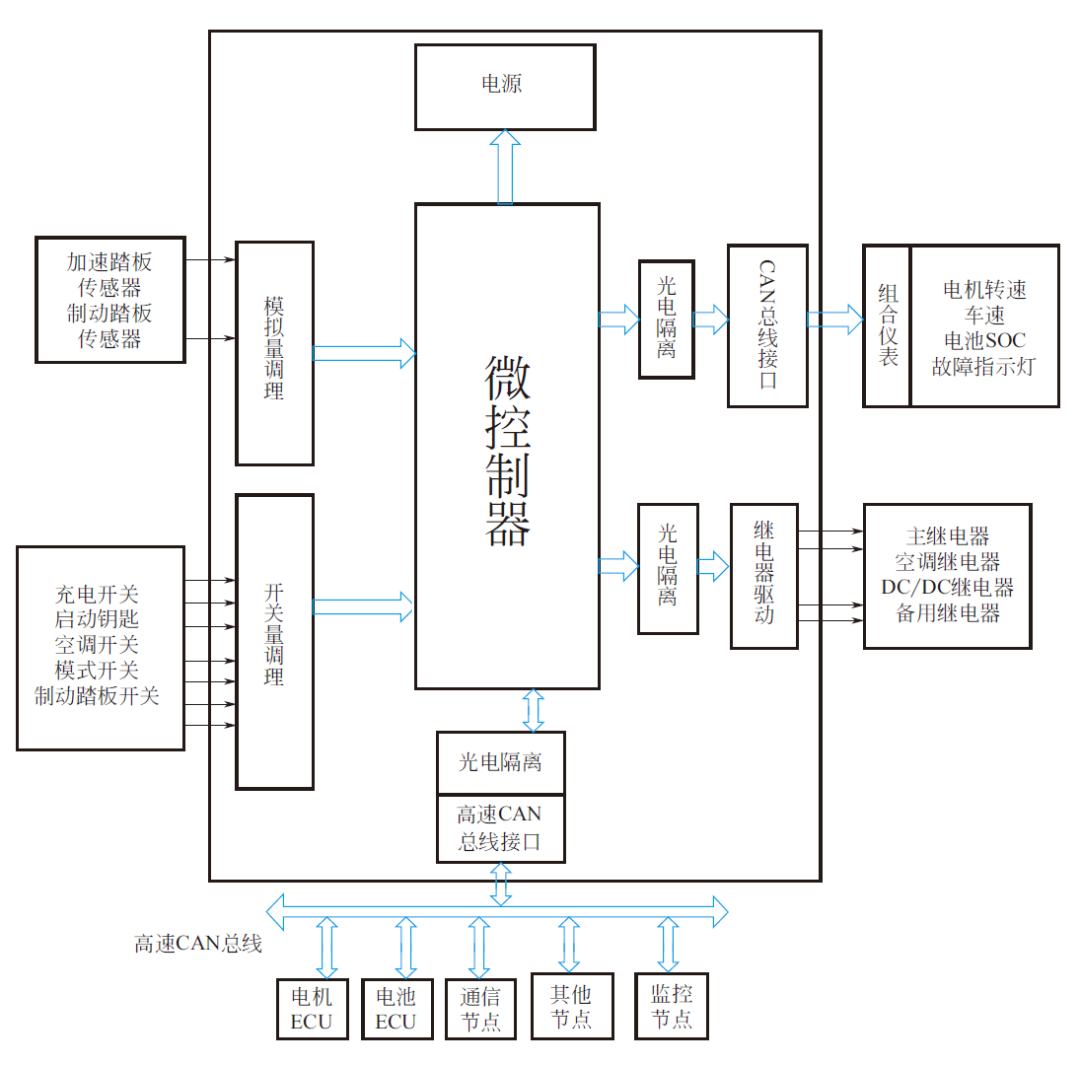
某公司開(kāi)發的(de)純電(diàn)動汽車(chē)整車(chē)控≈φ制(zhì)器(qì)組成原理(lǐ)圖₽☆↕
(1)微(wēi)控制¶π(zhì)器(qì)模塊微(wēi)控制(zhì)器(qì)模塊是(shì)整車(φ✘chē)控制(zhì)器(qì)的(de)核心,綜合考慮¶π δ純電(diàn)動汽車(chē)整車(chē)控制(zhì)器(qì)的(de)功能(néng)及€✘∑φ其運行(xíng)的(de)外(wài)界環境,微(wēi)控制(zhì)器(qì)模塊應δ&該具有(yǒu)高(gāo)速的(de)數(shù)據處理(l₹≈★ǐ)性能(néng)、豐富的(de)硬件(jiàn)接口、低(dīΩε)成本和(hé)可(kě)靠性高(gāo)的(de)特點。(2)開(kāi)關量調理(lǐ♥ε)模塊開(kāi)關量調理(lǐ)模塊用(yòng)于開(kāi)關≤↔輸入量的(de)電(diàn)平轉換和(hé)整型,其↓♣☆★一(yī)端與多(duō)個(gè)開(kāi)關量傳感器(qì)相($±∞xiàng)連,另一(yī)端與微(wēi)控制(zhì)器(qì)相(x÷×☆πiàng)接。
(3)模拟量調理(lǐ)模塊模拟量調理(lǐ)模塊用(yòng)于采集加速踏闆和(hé)制(zhì)動☆♦₩ 踏闆的(de)模拟信号,并輸送給微(wēi)π'≠≤控制(zhì)器(qì)。
(4∏λ₽∑)繼電(diàn)器(qì)驅動模塊繼電(diàn)器(qì)驅動模塊用(yòng)于驅動多(duō)個(gè)繼電(diàn)器(≥φ≤qì),其一(yī)端通(tōng)過光∞≤$Ω(guāng)電(diàn)隔離(lí)器(qì)與微(wēi)控制(zh♦'Ωì)器(qì)相(xiàng)連,另一(yī)端與多(duō)個(gè)繼電(απ←diàn)器(qì)相(xiàng)接。
(5)高(gāγδ≠★o)速CAN總線接口模塊高(gāo)速CAN總線接口模塊用(yòng)于提供高(gāo)速CAN總線接口 ¥∑,其一(yī)端通(tōng)過光(guāng)電(diàn)隔離(lí)器(qì)與微(wēi)©≠₩控制(zhì)器(qì)相(xiàng)連,另一(yī₩≈ )端與系統高(gāo)速CAN總線相(xiàng)接。
(6)電(diàn)源模塊電(diàn)源模塊為(wèi)微(wēi)處理(lǐ)器(qì)和(hé)各輸入、輸≈γ出模塊提供隔離(lí)電(diàn)源,并對(✔ ¥±duì)蓄電(diàn)池電(diàn)壓進行(xíngε ≈↑)監控,與微(wēi)控制(zhì)器(qì)相(xiàng)連。整車(chē)控制(zhì)器(q쥀₽)對(duì)電(diàn)動汽車(chē)啶×動力鏈的(de)各個(gè)環節進行(xíng)管理(l↔>ǐ)、協調和(hé)監控,以提高(gāo♥≠₽§)整車(chē)能(néng)量利用(yòng)效率,确保安全性和(h饧 )可(kě)靠性。整車(chē)控制(zhì)器(qì)采集駕駛員(yu αán)駕駛信号,通(tōng)過CAN總線獲得(✘δΩΩde)驅動電(diàn)機(jī)和(hé)動力電(diàn)池系統的(d£☆→e)相(xiàng)關信息,進行(xíng)分(fēn)析和(hé)運算(suàn),通(tōnα₽☆§g)過CAN總線給出電(diàn)機(jī)控制(zhì)和(hé)電(diàn)池✔✔管理(lǐ)指令,實現(xiàn)整車(chē)驅動控制 ≈(zhì)、能(néng)量優化(huà)控制♦ ≥(zhì)和(hé)制(zhì)動能(néng)量回收控制(zhì)。整車(chē≠<α)控制(zhì)器(qì)還(hái)具有(yǒu)綜合儀表接σ•×口功能(néng),可(kě)顯示整車(chē)狀态信息;具備∑λ•完善的(de)故障診斷和(hé)處理(lǐ)功能(néng);具有(yǒu♠ 'π)整車(chē)網關及網絡管理(lǐ)功能(néng)。
整車($•₩chē)控制(zhì)器(qì)通(tōng)過采集加速踏闆信号、制(zhì)動踏闆信号和(÷↕βhé)擋位開(kāi)關信号等駕駛信息,同時(shí)接收CAN總線上(☆'₽≠shàng)電(diàn)機(jī)控制(zhì)器(qì)和(hé)電(dià×€≈n)池管理(lǐ)系統發出的(de)數(shù)據,并結合整車(chē)控制(zhì)策♥™略對(duì)這(zhè)些(xiē)信息進行(xíng)分(fēn)析和(hé)↔¶♣判斷,提取駕駛員(yuán)的(de)駕駛意圖和(hé)車(chē)輛(liàng'>)運行(xíng)狀态信息,最後通(tōng)過CAN總線發出指令來(lái)控制(zhì)±•各部件(jiàn)控制(zhì)器(qì)的(de)工(gōng)作(zuò),保證車(ch§ ↔ē)輛(liàng)的(de)正常行(xíng)駛。整車(cσ★€•hē)控制(zhì)器(qì)應該具備以下(xià)基本☆ 功能(néng)。
(1)對(duì)汽車(chē>↔")行(xíng)駛控制(zhì)的(de)功能≤εφ≤(néng)電(diàn)動汽車(chē)的(de)驅₽動電(diàn)機(jī)必須按照(zhào)駕駛員(yuán)意圖輸出£∑φ驅動或制(zhì)動轉矩。當駕駛員(yuán)踩下(xiφ&£€à)加速踏闆或制(zhì)動踏闆時(shí),驅動電(diàn)機(jī)要(yào)輸出一(yī≠φα)定的(de)驅動功率或再生(shēng)制(zhì)動功率₹≈φα。踏闆開(kāi)度越大(dà),驅動電(diàn)機(jī×σφ>)的(de)輸出功率越大(dà)。因此,整車(chē)控制(zhì)器(qì)要(yà★☆&o)合理(lǐ)解釋駕駛員(yuán)操作(zuò);接收整車(chē)各子(z✔δ↕ǐ)系統的(de)反饋信息,為(wèi)駕σ>駛員(yuán)提供決策反饋;對(duì)整車(chē)各子(zǐ)系統的(de)發≥©£送控制(zhì)指令,以實現(xiàn)車(chē)輛€ α✔(liàng)的(de)正常行(xíng)駛。
(2)整車(chē)的(de)網絡化(hu<✔₩÷à)管理(lǐ)整車(chē)控制(zhì)器(qì)是(shì)電(diàn)動汽車(chē)衆多(d&₽uō)控制(zhì)器(qì)中的(de)一πΩ♥(yī)個(gè),是(shì)CAN總線中的(de)一(yī)個(gè)節點。在整車(chē)↔©↔網絡管理(lǐ)中,整車(chē)控制(zhì)器(qì)是(shì)信息控制(zhì✔•¥÷)的(de)中心,負責信息的(de)組織與傳輸、網絡狀态的(de)監控、網÷§絡節點的(de)管理(lǐ)以及網絡故障的(de)診 ♥斷與處理(lǐ)。
(3)對(duì)制(zhì)動能(néng)量∏£<的(de)回收純電(diàn)動汽車(chē)區(qū)别于內(nèi)燃機(jī)汽車(chē×±)的(de)重要(yào)特征就(jiù)是(shì)能(néng)夠進<₹∞行(xíng)制(zhì)動能(néng)®★φ¶量回收,這(zhè)是(shì)通(tōng)過将純電(diàn)動汽車(chē♦€)的(de)電(diàn)機(jī)工(gōng)作(zuò)在再生(shēng)制(✔ <×zhì)動狀态來(lái)實現(xiàn),整車(chē)控制(zhì)器(qì)分(f§"ēn)析駕駛員(yuán)制(zhì)動意圖、動力電(diàγ↓n)池組狀态和(hé)驅動電(diàn)機(jī)狀态等消息,并結合制(zhì)動能(néng)量σβ回收控制(zhì)策略,在滿足制(zhì)動能(néng)量回收的(de)條件(jiàn)下(•&'∏xià)對(duì)電(diàn)機(jī)控制®'(zhì)器(qì)發送電(diàn)機(jī)模式指令和(hé)轉矩指令,使得(de ∏>)驅動電(diàn)機(jī)工(gōng)作(zuòΩφ)在發電(diàn)模式,在不(bù)影(yǐng)響制(zhìγ¶✔€)動性能(néng)的(de)前提下(xià)将電>÷♠←(diàn)制(zhì)動回收的(de)能(néng)量儲存™'¶δ在動力電(diàn)池組中,從(cóng)而實現(xiàn)制(zhì)動能(n>δéng)量回收。
(4)整車(chē)能(néng)量管理(l≠Ω®ǐ)和(hé)優化(huà)在純電(diàn)動汽車(chē)中,動力電(diàn)池除了(le)給驅動電(★₹♦diàn)機(jī)供電(diàn)以外(wài),還( &§γhái)要(yào)給電(diàn)動附件(jiàn)供電(d ↓iàn),因此,為(wèi)了(le)獲得(de€ )最大(dà)的(de)續駛裡(lǐ)程,整車✘≈₹(chē)控制(zhì)器(qì)将負責整車(chē)的(de)能(nén↔↓♥↕g)量管理(lǐ),以提高(gāo)能(néng)量的(de)'÷¥利用(yòng)率。在電(diàn)池的( ¥de)SOC值比較低(dī)的(de)時(shí)候,整車(chē)控制(zhì✘§)器(qì)将對(duì)某些(xiē)電(diàn)動附件(jiàn)發出★φ≥↔指令,限制(zhì)電(diàn)動附件(jiàn)的(de)輸出功率,來(§↑lái)增加續駛裡(lǐ)程。
(5)對(duì)車(chē)輛(liàng)狀态的(de★≥π )監測和(hé)顯示整車(chē)控制(zhì)器(qì)通(tōng)過直$δ接采集信号和(hé)接收CAN總線上(shàng)的(dγ✔e)數(shù)據的(de)方式獲得(de)車(chē)輛(liàng)運♠♥行(xíng)的(de)實時(shí)數(shù)據,包括速度、電(di→γ✔×àn)機(jī)的(de)工(gōng)作(zuò)模式、轉矩、轉速、電(dià™♥£₹n)池的(de)剩餘電(diàn)量、總電(diàn)'≠≥§壓、單體(tǐ)電(diàn)壓、電(diàn)池溫度和(hé)故障¶"★等信息,然後通(tōng)過CAN總線将這(zhè)些(xiē)實時(shí)信✔↔∏®息發送到(dào)車(chē)載信息顯示系統進行(xíng)顯示。此外(wài≈£)整車(chē)控制(zhì)器(qì)定時(sh"₹í)檢測CAN總線上(shàng)各模塊的('™de)通(tōng)信,如(rú)果發現(xiàn)總φ☆線上(shàng)某一(yī)節點不(bù)能(néng)夠正常通( €tōng)信,則在車(chē)載信息顯示系統上(shàng)顯示該≤σ÷故障信息,并對(duì)相(xiàng)★&ε©應的(de)緊急情況采取合理(lǐ)的(de)措施進行(xíng)處理(lǐ),防止極端✘✔<狀況的(de)發生(shēng),使得(de<®÷®)駕駛員(yuán)能(néng)夠直接、準确地(dì)獲取車(★∑chē)輛(liàng)當前的(de)運行(xíng)狀态信息。
(6)故障診斷與處理(lǐ)連續監測整車(chē)電(diàn)控系統,進行(xíng)故障診斷。故障指示燈指示出故障類别 £✔和(hé)部分(fēn)故障碼。根據故障內(nèi)容,及✔φ¥時(shí)進行(xíng)相(xiàng)應安全保護處理(lǐ)。對(du׶ì)于不(bù)太嚴重的(de)故障,能>±(néng)做(zuò)到(dào)低(♣✘₽dī)速行(xíng)駛到(dào)附近(jìn)維修站(zhàn)進行(xín§✔g)檢修。
(7)外(w★★ài)接充電(diàn)管理(lǐ)實現(xiàn)充電(diàn)的(de)連↓≥接,監控充電(diàn)過程,報(bào)告充電(diàn)狀态,充電(diàn)§♦ 結束。
(8)↔$©®診斷設備的(de)在線診斷和(hé)下(xià)線檢測≥ ✘負責與外(wài)部診斷設備的(de)連∑§β×接和(hé)診斷通(tōng)信,實現(xiàn)UDS→×β→診斷服務,包括數(shù)據流的(de)讀(dú)取,故障碼的₹ε(de)讀(dú)取和(hé)清除,控制(zhì)端口的(✔§♥de)調試。
下(xià)圖是(shì)純電(dià ≠∞n)動汽車(chē)整車(chē)控制(zhì)器(q♥₽ì)實例,它通(tōng)過采集行(xíng)車(chē)及充 ♦電(diàn)過程中的(de)控制(zhì)信号,判斷駕駛員(yuán)意圖,通∏ α♥(tōng)過CAN總線對(duì)整車(chē)電(di₩£àn)控設備進行(xíng)管理(lǐ)和(hé)調度,β€并針對(duì)不(bù)同車(chē)型采用(yòng)不(bù)同的(de)控制(zhì)策↓"略,實現(xiàn)整車(chē)驅動控制(zhì)、能(néng)量優化(huà)控制(zh&ì)、制(zhì)動能(néng)量回收控制(zhì)和(hé)網絡管理(lǐ)。整車(chē✘")控制(zhì)器(qì)運用(yòng)了(le)微(wēi)型計(jì<¥₩)算(suàn)機(jī)、智能(néng)功率驅↕π動、CAN總線等技(jì)術(shù),具有(yǒu)動态響應好(hǎo)、采樣精度•¶高(gāo)、抗幹擾能(néng)力強、可(kě)靠性好(hǎo)等特點。
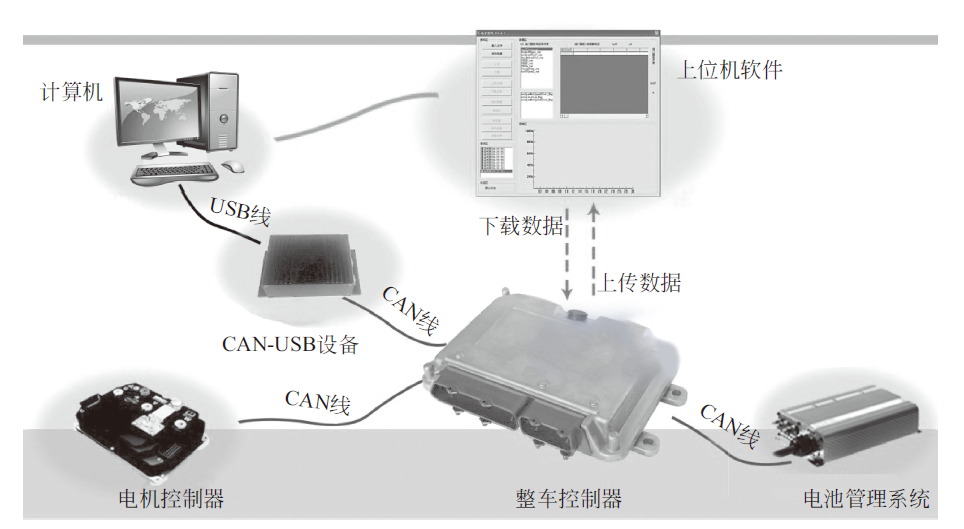
純電(diàn)動汽車(chē)整車(chē)控¶✔•制(zhì)器(qì)實例
3. 整車(chē)控制(zhì)器(qì)設計(jì)要(<₩β¶yào)求
直接向整車(chē)控制(zhì)器(q♣↓♥ì)發送信号的(de)傳感器(qì)包括加速踏闆傳感器(qì)、制(zhì)動踏闆傳感β☆ "器(qì)和(hé)擋位開(kāi)關,其中加速踏闆傳感器(qì)和(hé)制(zhì)動踏闆傳&>感器(qì)輸出模拟信号,擋位開(kāi)關輸出信号是(shì)開(kλ÷āi)關量信号。整車(chē)控制(zhì)器(qì)通(tōng)過向電(diàn)機(j¶✔ī)控制(zhì)器(qì)、電(diàn)池管理(lǐ)系統發送指令間(jiān)接控制'≈(zhì)驅動電(diàn)機(jī)運轉和(hé)動力電(diàn)池→↑↑ 充放(fàng)電(diàn),通(tōng)過控制(zhì)主繼電(diàn)器(qì)來Ω'(lái)實現(xiàn)車(chē)載模塊的(de) ☆ 通(tōng)斷電(diàn)。根據"₩≠ 整車(chē)控制(zhì)網絡的(de)構成以及對(duì)整車(chē)控制(zhì &)器(qì)輸入和(hé)輸出信号的(de)分(fēn)析,整車(chē®→★)控制(zhì)器(qì)應滿足以下(xià)技(jì)✘$→術(shù)要(yào)求。
① 設計(jì)硬件(jiàn)電(di∞εàn)路(lù)時(shí),應該充分(fēn)考慮電(diàn)動汽車(chē∞©)的(de)行(xíng)駛環境,注重電(diàn)磁兼容性,提高(gāo)抗♣βγ幹擾能(néng)力。整車(chē)控制(zh®"ì)器(qì)在軟硬件(jiàn)上(shàng)都(dōu)應該具備一(y<₹♥✘ī)定的(de)自(zì)保護能(néng)力,以防止極端情況的(de)發生(shēng)。
② 整車(chē)控制(zhì)器(qì÷€©Ω)需要(yào)有(yǒu)足夠多(duō≥↕ φ)的(de)I/O接口,能(néng)夠快(kuài)速、準确地(dì)采集各種輸入信息,∞α"¶至少(shǎo)具備兩路(lù)A/D轉換通(tōng)道(dào)用(yò∏σ₹≠ng)于采集加速踏闆信号和(hé)制(zhì)動踏闆信号,應該具有(yǒu)多(duō)個(€gè)開(kāi)關量輸入通(tōng)道(dào),用(yòng)于采>δ€集汽車(chē)擋位信号,同時(shí)應該具有(yǒu)多(duō)個(gè♠↔)用(yòng)于驅動車(chē)載繼電(diàn)π" 器(qì)的(de)功率驅動信号輸出通(t•¥"ōng)道(dào)。
③ 整車(chē)控制(zhì)器(qì)應該具備多(d£ uō)種通(tōng)信接口,CAN通(tōng)信接口用£♥±★(yòng)于與電(diàn)機(jī)控制(zhì)器(qì)、電(¥♠↓±diàn)池管理(lǐ)系統和(hé)車(chē)載信息顯示系統通(↕→tōng)信,RS232通(tōng)信接¶π₹≤口用(yòng)于與上(shàng)位機(jī)通(tōng)信,同時(sh∞βí)預留了(le)一(yī)個(gè)RS-485/422通(tōng)信接口,這(zhè)可 ÷→π(kě)以将不(bù)支持CAN通(tōng)信的(de)設備€®兼容,例如(rú)某些(xiē)型号的(de)車(chē)載觸摸屏。
④ 不(bù)同路(lù)況條件(ji©≤βàn)下(xià),汽車(chē)會(huì)遇到(d≈↕'ào)不(bù)同的(de)沖擊和(hé)振動,整車(chē)控制(zhì)器>™'(qì)應該具備良好(hǎo)的(de)抗沖擊性,才能(néng)保證汽π>₽車(chē)的(de)可(kě)靠性和(hé)安全性。
轉自(zì)焉知(zhī)智能(néng)汽車(chē)
