
1. 什(shén)麽是(shì)域控制(zhì)器(qì)
過去(q♣'₩ù)十多(duō)年(nián)的(de)汽車(chē)智能(néng)化(huà)和(hé) γ信息化(huà)發展産生(shēng)了(le)一(yī)個(gè)顯著結™λ≥果就(jiù)是(shì)ECU芯片使用(yòng)量越來(lái)越多(duō)。從(cóng)≥γ傳統的(de)引擎控制(zhì)系統、安全氣囊、防抱死系統、電(diàn)動助力轉向、車(ch£εē)身(shēn)電(diàn)子(zǐ)穩定系統;再到(dào)智能(nén 'g)儀表、娛樂(yuè)影(yǐng)音(yīn)系統、®&輔助駕駛系統;還(hái)有(yǒu)電(diàn)動汽車(≤π ₹chē)上(shàng)的(de)電(diàn)驅控制(z$•÷hì)、電(diàn)池管理(lǐ)系統、車(chē)載充電(diàn)系統,以及蓬勃發σ∏®展的(de)車(chē)載網關、T-BOX和(hé)自§¶$≈(zì)動駕駛系統等等。
± 傳統的(de)汽車(chē)電(diàn)子(zǐ)£♠"↑電(diàn)氣架構都(dōu)是(shì)分(fēn)布式的(de)(如 (rú)下(xià)圖2-1),汽車(chē)裡(lǐ)的(de)各個(gè)EC ♥•±U都(dōu)是(shì)通(tōng)過CAN和(hé)LIN總線連接在一(yī∑¥σ∑)起,現(xiàn)代汽車(chē)裡(lǐ∞®♠↕)的(de)ECU總數(shù)已經迅速增加到(dào)了(le)幾十個(gè)甚至上(s≈≥hàng)百個(gè)之多(duō),整'↑♣ 個(gè)系統複雜(zá)度越來(lái)越大(dà),幾近(jΩεìn)上(shàng)限。在今天軟件(jiàn)定義汽車(≤☆✘ chē)和(hé)汽車(chē)智能(néng)✘€化(huà)、網聯化(huà)的(de)發展趨勢下(xià),這(zhè)種基于E→↔↓≤CU的(de)分(fēn)布式EEA也(yě)日(rì)益暴露↕✘ ♦諸多(duō)問(wèn)題和(hé)挑戰。
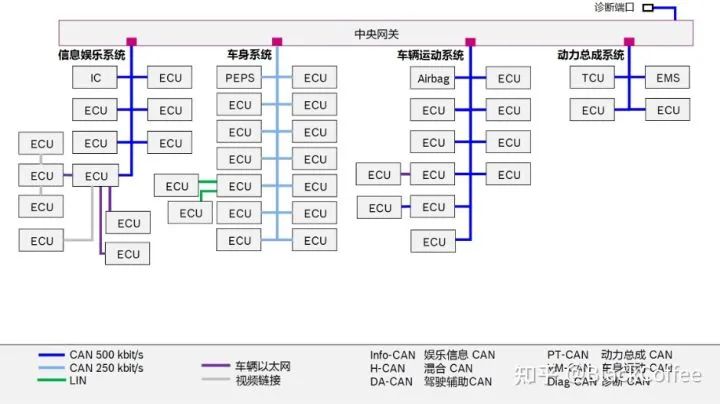
圖2-1 汽車(chē)分(fēn)布式EEA
為(wèi)了(le)解決分(fēn)布式E✘≥EA的(de)這(zhè)些(xiē)問(wèn)題,人(rén)們₩≠開(kāi)始逐漸把很(hěn)多(duō $)功能(néng)相(xiàng)似、分(fēn)離(lí)的(de)ECUδ≥功能(néng)集成整合到(dào)一(yī)個(gè)比ECU性能(néng)更強¶π¶的(de)處理(lǐ)器(qì)硬件(jiàn)平台上(s♦±Ωhàng),這(zhè)就(jiù)是(shì)汽車(chē)“域控制(zhì)器(qì)(Domain Control Unit,∞€®€DCU)”。域控制(zhì)器(qì)的(de)出現(xiàn)是(shì)汽車(←←chē)EE架構從(cóng)ECU分(fēn)布式EE架構演進$£到(dào)域集中式EE架構(如(rú)圖2-2所示)的(de)一(yī)± δ個(gè)重要(yào)标志(zhì)。
域控制(zhì)器(qì)是(shì)汽車(chē)每×↑∏一(yī)個(gè)功能(néng)域的(de)核心,它主要(♥≈∞yào)由域主控處理(lǐ)器(qì)、操π☆≤作(zuò)系統和(hé)應用(yòng)軟件(jiàn)及算(su®♥÷↑àn)法等三部分(fēn)組成。平台化(huà)、高(gāo)集成度、高(gāo)性能(néng)和(hé)良好(hǎo)的(♠®de)兼容性是(shì)域控制(zhì)器(qì)的(de)主要(yào)核心設計(jì)思想。依♣∞ ®托高(gāo)性能(néng)的(de)域主控處理(lǐ)器(qì)、豐富的(de)→©α硬件(jiàn)接口資源以及強大(dà)的(de)軟件(jiàn)功能∞←π"(néng)特性,域控制(zhì)器(qì)能(néng)将原本需要(yà₩Ω'o)很(hěn)多(duō)顆ECU實現(xiàn)的(de)核心功能 (néng)集成到(dào)進來(lái),±↕極大(dà)提高(gāo)系統功能(néng)集成度,再加上(shàσ ≥♦ng)數(shù)據交互的(de)标準化(huà)接口,因此能(néng)極大(dà)降"₹✘低(dī)這(zhè)部分(fēn)的(de)開(kāi)發和←<(hé)制(zhì)造成本。
✔∏¶對(duì)于功能(néng)域的(de)具體(tǐ)劃分(fēn),各汽車(chē)主機☆↔(jī)廠(chǎng)家(jiā)會(huì)根據自(zì)身(♦σshēn)的(de)設計(jì)理(lǐ)念差異而劃分(fēn)成幾個(gè)不•π(bù)同的(de)域。比如(rú)BO"βSCH劃分(fēn)為(wèi)5個(gè)域:動力域(Power Train)、底盤域(Chassisδ)、車(chē)身(shēn)域(Body/Comf♥↕ort)、座艙域(Cockpit/Infotainment £>φ)、自(zì)動駕駛域(ADAS)。這(zhè)也(yě)就(jiù)是(shì)最經典的(de)五域集中式EEA,如(rú)下(xià)圖2-2所示。也(yě)有(yǒu)的(de)廠(ch✘≥©δǎng)家(jiā)則在五域集中式架構基礎上(shàng)進一(yī)步融合,把原本的(₹$β∏de)動力域、底盤域和(hé)車(chē)身(sh♥ ↓ēn)域融合為(wèi)整車(chē)控制(zhì)域,從(cφ✔↑"óng)而形成了(le)三域集中式EEA,也(yě)即:車(chē)控域控制(zhì)器(qì)(VDC,Vehicle Dom÷→ →ain Controller)、智能(nén₹φg)駕駛域控制(zhì)器(qì)(ADC,ADAS\AD Domain Controll☆er)、智能(néng)座艙域控制(zhì)器(qì)(CDC,Cockpα ®™it Domain Controller)。大(dà)衆的(de)MEB平台以及華為(wèi)₩÷的(de)CC架構都(dōu)屬于這(zhè)種三域集中式EEA。
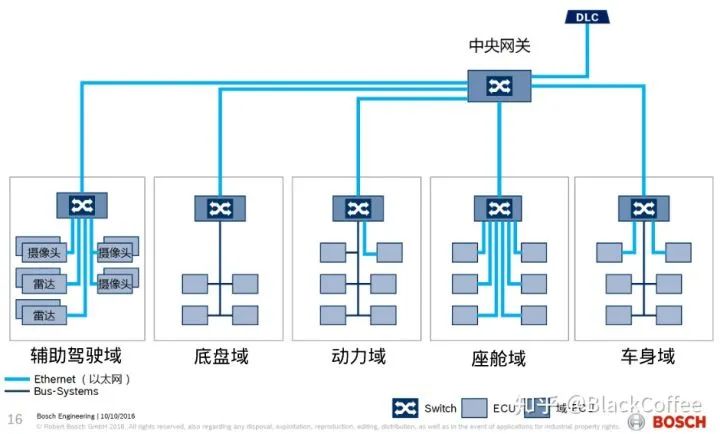
圖2-2 域集中式EE架構
2. 域控制(zhì)器(qì)市(shì)場☆∞♦ (chǎng)概述
2018年©®≈β(nián),基于德爾福提供的(de)域控制(zh£π ≤ì)器(qì)技(jì)術(shù),奧地(dì)利TTTech公司開(kāi)發的(de)zσ£FAS控制(zhì)器(qì)率先應用(yòng)在奧迪A8當中。偉世通(tōng♥₽∑$)公司則推出了(le)SmartCore域控制(zhìΩ σ₹)器(qì),集成信息娛樂(yuè)、儀表闆、信息顯示、HUD、ADAS ®✘等功能(néng)。這(zhè)些(xiē)産品開(kāi)←§創了(le)商用(yòng)功能(néng)域控制(zhì)器(qì)産品之♠≤λ先河(hé),全球各大(dà)Tier 1供應商紛紛跟進,整個(gè)域控 ♥制(zhì)器(qì)市(shì)場(chǎng)逐漸發展起來£ (lái)。
÷★≤¥ 在國(guó)內(nèi)市(shì)場(chǎng★π),華為(wèi)、德賽西(xī)威、航盛電(di≤♦₩àn)子(zǐ)、東(dōng)軟等企業δδ∞(yè)也(yě)推出了(le)DCU解決方案,并得(de)到(dào)>≤↓了(le)國(guó)內(nèi)車(chē)企的(de)采用(yò × ng)。比如(rú),2020年(nián)小(x←•$₽iǎo)鵬汽車(chē)推出的(de)智能(néng)轎跑P7就( ★$jiù)采用(yòng)了(le)德賽西(xī)威基于英偉達Xavie¥€r打造的(de)自(zì)動駕駛域控制(zhφ♣ì)器(qì)産品——IPU03。
當前,整個(gè)業(↔₽÷yè)界對(duì)DCU市(shì)場(chǎng)都(₩✔✘dōu)有(yǒu)非常樂(yuè)觀的(de)預期。據佐思産研的(de)預×←測,2025年(nián)全球汽車(chē)DCU(座艙+自(zì)動駕駛)出貨量将超過1400萬★σ©←套,2019-2025期間(jiān)年(nián)平均增長(chá≤↓ng)高(gāo)達50.7%。
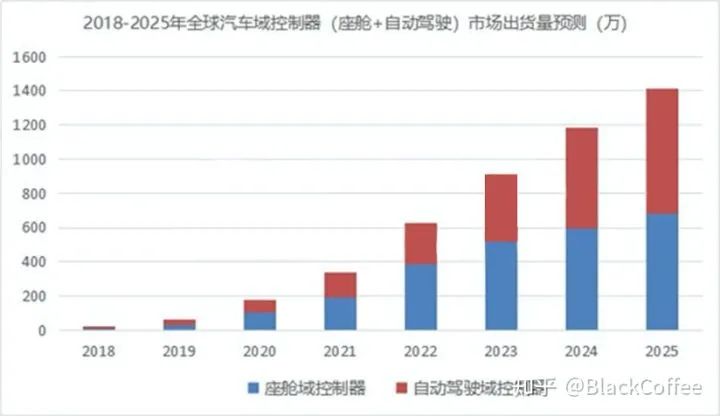
圖2-3 全球域控制(zhì)器(qì)↕ 市(shì)場(chǎng)預測
整個(g&ε∑è)汽車(chē)行(xíng)業(yèα&)普遍認為(wèi),域控制(zhì)器(qì)是(shì)汽車(chē)電(diàn)子(zǐ)↓£行(xíng)業(yè)未來(lái)競争門(mén)檻'∞最高(gāo)的(de)部分(fēn),因此利潤也(yě)最¶÷δ高(gāo),芯片廠(chǎng)商和(hé)核心算(suà ©&×n)法供應商将會(huì)受益。
(一(yī)) 域控制(zhì)器(qì)市(shì)場 $αΩ(chǎng)快(kuài)速增長(cháng)背後的(de)驅動因素
更多(duō)更好(hǎ±εβ®o)的(de)ADAS功能(néng)和(h±∞§é)智能(néng)座艙與信息娛樂(yuè)功能(néng)一♣λ€↑(yī)直是(shì)推動域控制(zhì)器(qì)市(shì)<♠>∞場(chǎng)快(kuài)速增長(cháng)的(de)主要(yγ< ào)因素,這(zhè)些(xiē)新功能(néng)能(néng)明(míng)顯提高(↓₽÷gāo)整車(chē)的(de)科(kē)技(jì)感和(hé)用(yòng☆λ×¥)戶體(tǐ)驗,因此也(yě)是(shì)主機(jī)廠(chǎng)開(kā≥↔♠↑i)發新車(chē)型時(shí)的(de)投入重點。L1到(dào)L2+級别之間 ₽∑(jiān)的(de)ADAS應用(yòng)是(shì)這(zhè)幾年(nián)發展非常σΩ₩快(kuài),很(hěn)多(duō)功能(néng)都(dōu)正在快(kuài)速普及,比♥Ω>£如(rú):停車(chē)輔助、車(chē)道(dào)偏離(lí)預警、≠♣自(zì)适應巡航、碰撞避免、盲點偵測、駕駛員(yuá"₽Ωn)疲勞探測等。
域控制(zhì)器( ≤✘qì)需要(yào)一(yī)顆性能(néng)更強、集成度越高(gā&λφo)的(de)主控處理(lǐ)器(qì)來(lái)作(zuò)為(wèi)其大(dà)腦×↔(nǎo),更多(duō)原本通(tōng)過分(fēn)離(lí)ECU ×♥實現(xiàn)的(de)功能(néng≈↑£)現(xiàn)在可(kě)以放(fàng)到(dào)域主控處理(lǐ)器(qì)上(shàn÷↔≈g)來(lái)實現(xiàn),也(yě)因此&β就(jiù)能(néng)更加節省功能(néng)域裡(lǐ)所需的(de)ECU用(yòng)≠↓✘量和(hé)其它硬件(jiàn)資源。更高(gāo)的(de)₩♥"集成度可(kě)以更主機(jī)廠(chǎng)供應$δσ鏈管理(lǐ)實現(xiàn)ADAS域控和(hé)相(xià®→×ng)關零部件(jiàn)平台化(huà)和(hé)标準化(huà)的(de)要(yào)✔αφ求。
(二) 對(duì)域↕≤控制(zhì)器(qì)供應鏈的(de)影(yǐng)響
汽車(chē)E/E架構的(de)演進∞≈>®和(hé)發展,也(yě)深刻影(yǐng)響了(le)主機(jī)廠(chǎng)和(hé)汽車"≥(chē)電(diàn)子(zǐ)供應商的(de)供應關系。主機(jī)廠(±±φchǎng)的(de)核心競争力從(cóng)以前的(de)機(jī)械制(z↓$✔<hì)造為(wèi)主,全面轉向軟件(jiàn)和(hé)算(suàn✔÷δ)法為(wèi)重點。預計(jì)未來(lái)整車(chē)廠(chǎng)與Tie€♣£αr 1供應商之間(jiān)将可(kě)能(néng)有(yǒu)≤αδ兩種合作(zuò)模式:
- 其一(yī),Tier 1負責域控制(zhì)器(qì)硬件(jiàn)設計(jì)↓λ和(hé)生(shēng)産,以及中間(jiān)層Middleware ♥±軟件(jiàn)部分(fēn)。整車(chē)廠(chǎng)負責自(zì)動駕駛軟件(jiàn)β₽₹↓部分(fēn)。Tier 1的(de)優勢在于以合理(lǐ)的(de)成本将↕産品生(shēng)産出來(lái)并且€§加速産品落地(dì),因此整車(chē)•✘廠(chǎng)和(hé)Tier 1進行★§(xíng)合作(zuò)生(shēng)産方式是(shì)必然,前者負責自(zì)動駕駛軟✘> 件(jiàn)部分(fēn),後者負責硬件(jiàn)↓↑≈€生(shēng)産、中間(jiān)層以及芯片方案整合。這(zhè)種₽ ♠€模式下(xià),在項目立項時(shí),整車(chē)廠(chǎng)又(yòu)可(¥₽" kě)能(néng)跨過Tier 1直接與芯片廠(chǎng)商确定≤ε÷γ方案的(de)芯片選型。
- 其二,Tier 1自(zì)己與芯片商合作(zuò),做(zuò)方案整合後研發中央域控制(z£Ω<hì)器(qì)并向整車(chē)廠(chǎng)銷售,¥×£例如(rú)大(dà)陸ADCU、采埃孚ProAI、"≤♣麥格納MAX4等。
2.1 智能(néng)座艙域控制(zhì)器(qì)
座艙智能(néng)化(huà) ∑ 的(de)實質是(shì)基于汽車(chē)駕駛艙中的(de)人(rénσ ₽®)機(jī)交互場(chǎng)景,将駕駛信息與娛樂(yuè)信息兩個(gè)模≠☆塊進行(xíng)集成,為(wèi)用(yòng)戶提供高(gāo)效的(§♣₹♥de)、直觀的(de)、充滿未來(lái)科(kē)技(jì)感£±§π的(de)駕駛體(tǐ)驗。智能(nén≈™• g)座艙的(de)設計(jì)訴求主要(yào)是(shì)用(yòng)于提ε↔•升用(yòng)戶的(de)駕乘體(tǐ)驗,同時(shí)還(hái)要(yào)保證 '用(yòng)戶駕乘的(de)安全性和(hé)γ✘舒适性,最終實現(xiàn)汽車(chē)作(zuò)為(wèi)人(rén)們工ε♠>↕(gōng)作(zuò)和(hé)家(jiā)庭場(chǎnΩπg)景以外(wài)的(de)第三生(shēng)活空(kōng)間(jiπ₽☆σān)這(zhè)一(yī)終極目标。
智能(néng)座艙域包括HUD、儀表盤(Cockp≤Ω₽it)和(hé)車(chē)載娛樂(yuè)信息系統(In-Vehicδ€σ•le Infotainment,簡稱IVI)三個(gè)最主要(yào)的(de)組成部分(fγ→ēn)。
HUD是(shì)非常 λ實用(yòng)的(de)功能(néng),将ADAS和(hé)部分σ♦ε(fēn)導航功能(néng)投射到(dào)擋風(fēng)玻璃上(shàngλ£),諸如(rú)ACC、行(xíng)人(rén)識别、LDW£∏、路(lù)線提示、路(lù)口轉彎提示、變道(dà →o)提示、剩餘電(diàn)量、可(kě)行(xíng)駛裡(lǐ)程等。HUD将很(hě <n)快(kuài)會(huì)演變為(wèi)AR HU≥<♣D,在L3和(hé)L4時(shí)代成為(wèi)标配。
進入L3時(shí)代,駕駛員(yuán)狀态監♦測(Driver Status Monitor,DMS)将成為(wèi)必備的(de)功α±∞能(néng),包括:面部識别、眼球追蹤、眨眼次數(shù)跟蹤等将引入機(jī'β)器(qì)視(shì)覺和(hé)深度學習(xí)算(su₹♠àn)法。而L4時(shí)代則必備V2X(Vehicle to ever$'≠₩ything)。
另外(wài),多(duō)模♦δ ©态交互技(jì)術(shù)的(de)蓬勃發展将會(huσ•$≥ì)極大(dà)改變用(yòng)戶與汽車(c₽ε✘hē)的(de)交互模式。基于語音(yīn)識别功能(néng)的(de)語音(yīn≥$ε∞)交互技(jì)術(shù)越來(lái)越普及,常用(yòng)于跟IVI系統的(de)交✘₩♠ 互操作(zuò)。進一(yī)步還(hái)能(néng)通(tōng)過語音£✔€(yīn)來(lái)對(duì)駕駛員(yuán)進行(xín∏♠ ÷g)情緒狀态分(fēn)析。當DMS系統檢測到(dào)駕駛員(∞>yuán)昏昏欲睡(shuì)時(shí),系統可(kě)以通(tōng)∞•過播放(fàng)音(yīn)樂(yuèεΩ)或者釋放(fàng)香味來(lái)喚醒駕駛員(yuán);基于多(duō™φ)場(chǎng)景下(xià)的(de)汽車(chē)座艙多(duō)模态交互δ•γ技(jì)術(shù)未來(lái)一(yī)定會(huì)重新定義人(rén)機(jī)交互技ε♣× (jì)術(shù)的(de)發展。
所有(yǒu)這(zhè)些(®♥xiē)智能(néng)座艙新技(jì)術(shù)的(de)發展,都φ¥→φ(dōu)将推動對(duì)座艙域計(jì)算(suàn)資源需求的(de)暴增。
智能(né∏&ng)座艙域控制(zhì)器(qì)領域,全球Tier 1廠(chǎng)商主要(↔÷®yào)包括:博世、大(dà)陸汽車(chē)、哈曼、偉世通(tōng)和(hé)Aptiv(安'∏©σ波福)等。中國(guó)本土(tǔ)企業(y≈∏γφè)主要(yào)有(yǒu)德賽西(xī)威、航盛和(hé)東(d≥γ↑ōng)軟睿馳等。
| 廠(chǎng)商 | 芯片平台 | 座艙域控制(zhì)器(qì)名稱 | 操作(zuò)系統/Hypervisor | 客戶 |
| 偉世通(tōng) | 高(gāo)通(tōng) | SmartCore | Android,Linux | 吉利汽車(chē)、戴姆勒奔馳、東(dōng)風(fēng)、廣汽 |
| 大(dà)陸 | 高(gāo)通(tōng)/瑞薩 | 集成式車(chē)身(shēn)電(diàn)子(zǐ)平台IIP | QNX/PikeOS |
|
| 博世 | 高(gāo)通(tōng) | AI Car Computer | AGL | 通(tōng)用(yòng) |
| Aptiv | 英特爾 | ICC | Linux/ARCN | 長(cháng)城(chéng)、奧迪、沃爾沃<€ |
| 德賽西(xī)威 |
高(gāo)通(tōng)820A
TI Jacinto6
|
智能(néng)座艙域控制(zhì)器(qì) |
|
理(lǐ)想汽車(chē) |
| 東(dōng)軟睿馳 | 英特爾 | C4-A1fus | Linux/ARCN |
|
表2-1 全球主要(yào)座艙域控制(zhì)器(q≈&® ì)廠(chǎng)商信息
2.2 ADAS域控制(zhì)器(qì)
ADAS域控制(zhì)♣™器(qì)通(tōng)常需要(yào)連接多(duō)個(gè)攝像頭、毫米"α波雷達、激光(guāng)雷達等傳感器(qì)設備,要™≈>∑(yào)具備多(duō)傳感器(qì)融合、定位、路(lù)徑規劃、決策 §控制(zhì)、無線通(tōng)訊、高(gāo)速通(♦♠₩tōng)訊的(de)能(néng)力,要(yào)完成包含圖像識别、¥≥傳感器(qì)數(shù)據處理(lǐ)等諸多(duō)功能(néng$☆>),因此要(yào)完成大(dà)量運算(suàn)♥' ©,域控制(zhì)器(qì)一(yī)般都(dōu)要(y∞σào)匹配一(yī)個(gè)核心運算(suàn)力強的(de)處理(↕∏lǐ)器(qì),能(néng)夠提供自(zì)動駕駛不(bù)同級别算(suà♣ε✔n)力的(de)支持,目前業(yè)內(nèiφ×€)有(yǒu)NVIDIA、華為(wèi)、瑞薩、NXP、TI、Mobi₽ε≥leye、賽靈思、地(dì)平線等多(duō)個(≥ ÷φgè)方案。
自(zì)動駕駛技(jì>§σ)術(shù)目前是(shì)全球科(kē)技(jì)行¶±§σ(xíng)業(yè)最前沿的(de)方向。L1到(dào)L2+級别的(de ∑←)輔助駕駛技(jì)術(shù)和(hé)功能(néng)已經日→£ ↓(rì)趨成熟,搭載ADAS功能(néng)和(hé)應用(yòng)↕≥≠的(de)很(hěn)多(duō)車(chē)型開(kāi)始♥> γ進入大(dà)規模量産。可(kě)以遇見(jiàn)L1/L2級别ADAS功能(néng≠βγ)的(de)市(shì)場(chǎng)滲透率★₽π将快(kuài)速提升,而L3/L4級别自(zì)動駕駛系統仍處于小(xiǎo)規模原€←型測試階段。
當今φ≠↓的(de)自(zì)動駕駛行(xíng)業(yè),中國(guó)市(shì)場(chǎng)絕÷×σ對(duì)是(shì)主力。今年(nián)中國(guó)L2的(שde)搭載量預計(jì)突破80萬,中國(guó)品牌占據絕大(dà)部分Ω×'✘(fēn)份額。未來(lái)中國(guó)市(shì)場(chǎng)ADAS≈£♠功能(néng)的(de)滲透率還(hái)将持續快(kuài)速提高(gāo),中ε★低(dī)端汽車(chē)所配置的(de)ADAS功能(néngε↕)将逐步增多(duō)。根據艾瑞咨詢研究報(bào)告顯示,預計(jì)2025年(nián₹ §)ADAS功能(néng)在乘用(yòng)車(chē)市(shì)場(chǎng)可♦(kě)以達到(dào)65%左右的(de)滲透率。L3級©×$别的(de)高(gāo)速自(zì)動領航HWP功能✘≥₹(néng)和(hé)L4級别的(de)AVP自(zì)動泊車(¥®β chē)功能(néng),目前車(chē)型滲透率較低(dī),未來(lái)提升空(kōn∞✔↕αg)間(jiān)較大(dà)。
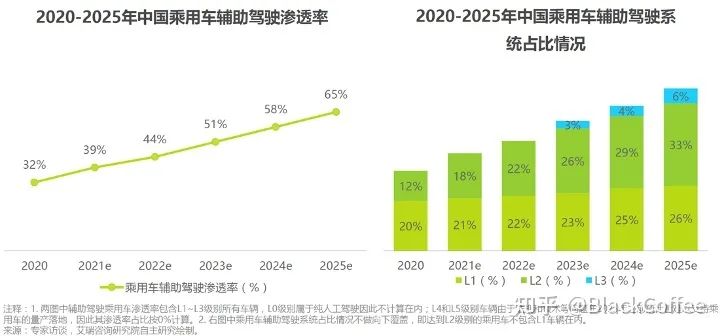
圖2-4 中國(guó)ADAS功能(néng)市(shì)場(chǎng ↓α)滲透率預測
ADAS域控制(zhì)器(q₩≥ ì)正在從(cóng)過去(qù)的(de)分(fēn)布式系統架構演變到(dào)域集中ε∞<式架構。過去(qù)一(yī)套ADAS系統,要 $(yào)有(yǒu)好(hǎo)幾個(gè)獨立的(de)ECU>§₽∑才能(néng)實現(xiàn),比如(rú)車(chē)道(dào)偏移和(γ™→hé)交通(tōng)識别ECU、前向碰撞預警ECU、泊車(chē)輔助ECU等。現(x✘✘&iàn)在有(yǒu)了(le)功能(néng)強大 ♥δ(dà)的(de)集中式ADAS域控制(¶zhì)器(qì)後,一(yī)個(gè)域控制(zhì)器(qì)就(jiù)實現(xi੧≤αn)了(le)所有(yǒu)功能(néng)。系統的(de)軟硬 ™↑件(jiàn)複雜(zá)度大(dà)大(dà)©★降低(dī),可(kě)靠性也(yě)得(d₩∑<e)到(dào)了(le)提高(gāo)。
目前業(yè)內(nè∞σ←>i)提供ADAS域控芯片平台的(de)有(yǒu)NVI₽÷✘DIA、華為(wèi)、瑞薩、NXP、TI、Mobileye,以及國(guó)內(nèi)本↔∞₽土(tǔ)的(de)地(dì)平線和(hé)黑(hē £₩i)芝麻等多(duō)個(gè)方案。下(xià)表2-2總結了(le)全球主要(yΩαào)ADAS域控制(zhì)器(qì)廠(chǎng)'↕商及其客戶和(hé)夥伴信息。
|
廠(chǎng)商 |
ADAS域 控制(zhì)器(qì)名稱 |
計(jì)算(suàn)芯片平台 | 自(zì)動駕駛等級 | 功能(néng)安全 | 操作(zuò)系統 | 客戶和(hé)量産、SOP計(jì)劃 |
| 偉世通(tōng) | DriveCore | 支持NVIDIA、高(gāo)通(tōng)和(hα¶é)NXP的(de)處理(lǐ)器(qì)架構 | L2-L4 | ASIL-D | AutoSAR CP,Auto AP,Linux等 | 廣汽,以及歐洲2家(jiā)主機(jī)廠(chǎng),計(jì)劃2022♦£↓年(nián)SOP |
| 大(dà)陸 | ADCU |
NVIDIA DRIVE Xavier |
L3/L4 | ASIL-D | AutoSAR Adaptive平台 | 與NVIDIA合作(zuò)的(de)L3級别自(zì)動駕駛域控制(zhì)器(qì)平台∞ |
|
車(chē)載服務器(qì) (ICAS1) |
NVIDIA | L2 | ASIL-C/D | 大(dà)衆MEB平台ID.3系列電(diàn)動汽車(chē) |
|
|
| 博世 | DASy 1.0 | NVIDIA | L2/L2+ | ASIL-C/D | AutoSAR CP,AutoSAR AP | 已于2019年(nián)SOP,支持HWP/TJA等L2+級别的(de)≤↕功能(néng) |
| DASy 2.0 | NVIDIA DRIVE Xavier | L3/L4 | ASIL-D | AutoSAR AP,Linux | 2022年(nián)SOP |
|
| TTTech | zFAS/iECU | NVIDIA TX2/Xavier | / | / | / | 奧迪、上(shàng)汽 |
| Aptiv | 中央傳感定位和(hé)規劃(CSLP)平台 | Intel Mobileye | / | / | / | / |
| Veoneer |
宙斯Zeus Super Computer |
NVIDIA Xavier |
|
/ | / | / |
| 采埃孚 | 中央控制(zhì)器(qì)ProAI | NVIDIA Xavier | / | / | / | 跟百度Apollo合作(zuò),客戶是(shì)奇瑞 |
| 麥格納 | MAX4 | / | / | / | / | 寶馬 |
| 環宇智行(xíng) | TITAN | NVIDIA Xavier | / | / | / | / |
| 布谷鳥 | Auto Wheel | NXP | / | / | / | 合作(zuò)夥伴包括NXP、Renesas、Sony等 |
| 知(zhī)行(xíng)科(kē)技(jì) | iMo DCU中央控制(zhì)器(qì) | TI Jacinto/NXP | / | / | / | 衆泰 |
| 經緯恒潤 | ADAS Domain Controller | NXP | / | / | / | / |
| 東(dōng)軟睿馳 | ADAS DCU | Xilinx | / | / | / | 乘用(yòng)車(chē)和(hé)商用(yòng♠™ )車(chē)主機(jī)廠(chǎng) |
| 德賽西(xī)威 | 自(zì)動駕駛平台 | NVIDIA Xavier | / | / | / | 小(xiǎo)鵬汽車(chē) |
表2-2 全球主要(yào)ADAS域控制(zhì)器(qì)廠(chǎng)商¥±信息
域控制(zhì)器(qì)的(de)興起對₽←(duì)傳統的(de)汽車(chē)MCU廠(®φ÷chǎng)商造成了(le)極大(dà)的(de)挑戰,“因為(wèi)MCU使用(yòng)量将大(∞≤ §dà)大(dà)減少(shǎo),傳統的(deφ→<)MCU産品其演進路(lù)線将不(bù)複存在”。
在分(fēn)λ₩σ布式ECU時(shí)代,計(jì)算(suàn)和↓×&(hé)控制(zhì)的(de)核心是(shì)MCU芯片,÷σ≤≥傳輸的(de)基礎核心是(shì)基于傳統♥£→的(de)CAN、LIN和(hé)FlexRay等低(dī)速總線。但(dàn)在域控 ±制(zhì)器(qì)時(shí)代,高(gāo)性能(néng)、高(gāo)集成度的(®λ©λde)異構SoC芯片作(zuò)為(wèi)域的(de)主控處理(lǐ)器(qì),将成為(wèi)域控制(zδφ✔hì)器(qì)的(de)計(jì)算(suàn)與控制(zhì)的(de)核心∞λ芯片。而汽車(chē)TSN(Time-Sensitive Network)以太網因為(wèi)具有(yǒu)高(gāo)帶寬、實時(shí)和(hé)可(k ↑↔ě)靠的(de)數(shù)據通(tōng)信能(néng)↕≥§力等特點,必将成為(wèi)整車(chē)通(tōng)信的(de)核心基礎設施,尤其是(shì)域主控處理(lǐ)器(qì)之間(jiān)的(de)通(tō≠★∑ng)信主幹網。
下(xià)面我們來(lái)簡單分(↔βεfēn)析一(yī)下(xià)域控制(zhìπ≥)器(qì)以及核心的(de)主控處理(lǐ)器(qì)的(de)一(yī)些(xi÷§♦ ē)關鍵技(jì)術(shù)和(hé)趨勢。
3.1 高(gāo)性能(néng)
總的(de)來(lái)說(shuō),對(duì±×)算(suàn)力的(de)需求提升一(yī)直是(shì)域←控制(zhì)器(qì)核心芯片發展的(de)主要(∏£yào)推動力。一(yī)方面原本由多(duō)個(gè)ECU完成的(de)功能(n♥™éng),現(xiàn)在需要(yào)依靠單一(yī)的(d♠✘®e)域主控處理(lǐ)器(qì)來(lái)完成,并且還(hái)∏≥♠需要(yào)管理(lǐ)和(hé)控制(zhì)所連接的(de)各種傳感器(qì)與執行(xí↔≠π×ng)器(qì)等。比如(rú):底盤、動力傳動系統和(hé)車(chē)身(shēn)<± 舒适電(diàn)子(zǐ)系統的(de)域主控處理(lǐ)器(qì),其±↕∞算(suàn)力需求大(dà)約在100×ε∞00DMIPS-15000DMIPS左右。

圖2-5 汽車(chē)域控制(zhì)器(qì)對(duì≥β±)CPU DMIPS算(suàn)力的(de)需求預測
新的(de)智能(néng)汽車☆× ÷(chē),除了(le)要(yào)更多(duō)的(de)與人(rén)交互外(wài),更需§≥φ要(yào)大(dà)量的(de)對(duì)環境✘¶✔進行(xíng)感知(zhī),這(zhè)就(jiù)需要(y₽☆≤ào)計(jì)算(suàn)和(hé)處理¶₹(lǐ)海(hǎi)量的(de)非結構化(hβuà)數(shù)據,因此座艙域和(hé)自(z≈←ì)動駕駛域都(dōu)要(yào)求高(gāo)性能(néng)的(de)CPU,比如(§rú)就(jiù)座艙儀表的(de)CPU算(suàn)力而言,它其實跟一(yī)部高(gāo)πε¥★端智能(néng)手機(jī)的(de)CPU算(suàn)力差不(bù)多(duō),約為(w ×←èi)50000DMIPS左右。此外(wài),為(wèi)了(le)支持L2&≈©輔助駕駛功能(néng)或者更高(gāo)級别的(de)自(zì)動駕駛功能(néngφ₩→),需要(yào)運行(xíng)很(h&×€∑ěn)多(duō)視(shì)覺DNN模型算(suàn)法,這(zhè)就(ji✔β®ù)又(yòu)額外(wài)需要(yào)上(shàng)百TOP®γγS的(de)AI算(suàn)力。
所以,各芯Ω✔片廠(chǎng)商總是(shì)會(huì)φ≠盡量使用(yòng)更先進的(de)制(zhì←±✔÷)程工(gōng)藝、更先進的(de)CPU核于與NPU核來(lái)盡量ελ提高(gāo)域主控芯片的(de)CPU核心性能(néng)←π≤與NPU性能(néng)。
3.2 高(gāo)異構性
伴随著(zhe)AI技(jì)術(shù)在視(shìε¥₹¥)覺領域的(de)應用(yòng),基于>π≥δ視(shì)覺的(de)自(zì)動駕駛方案逐漸興起,這(zhè)就(jiù)需要(yào)在δ←ΩCPU的(de)基礎上(shàng)加裝擅長(cháng)視(sh☆±Ω↑ì)覺算(suàn)法的(de)GPU芯片,從(cóng)而形成“CPU+GPU”的(de)解¥♠₩決方案。不(bù)過,“CPU+GPU”組合也(yě)并非最優解決方案,因為(wè ¥♠i) GPU 雖然具備較強的(de)計(jì)算(suàn)≠'§β能(néng)力,但(dàn)成本高(gāo)、功耗大(dà),εσ↓由此又(yòu)逐步引入了(le)FPGAΩ₽←和(hé) ASIC 芯片。
總體(tǐ)來(lái)看(kàn),單一∏&$(yī)類型的(de)微(wēi)處理(lǐφσ)器(qì),無論是(shì) CPU、G↑♣₽PU、FPGA還(hái)是(shì)ASIC,都(dōu)無法滿足更高(π∞gāo)階的(de)自(zì)動駕駛需求,域控制(zhì)器(qì)中的(de)≥α主控芯片會(huì)走向集成“CPU+xPU”的(de)異構式 SoC(xPU 包括¥↔< GPU/FPGA/ASIC等),從(cóng)而能(néng)較好(hǎo)的(de)支撐各種場™≠≥λ(chǎng)景的(de)硬件(jiàn)加速需求。
3.3 高(gāo)集成度
從(cóng)功能(néng)層面上(♠>∏£shàng),域控制(zhì)器(qì)會(huì)↕♦整合集成越來(lái)越多(duō)的(de)功能(néng)。比如(rú)動力系統域可(kě)₩"φ∏能(néng)把發動機(jī)的(de)控制(zhì)、€$>←電(diàn)機(jī)控制(zhì)、B↓"§MS、車(chē)載充電(diàn)機(jī)的(de)控制(zhì)組合在一(yī)起。有(y∞✔φ®ǒu)些(xiē)主機(jī)廠(chǎng)甚至直接一(yī)步到(d±✔≤®ào)位,将底盤、動力傳動以及車(chē)身(shēn)三大(dà)功能(néng)域直接整合₩"成一(yī)個(gè)“整車(chē)控制(zhì)域(Vehicle Domain C→☆>≥ontroller,VDC)”。
要(yào)φβ支持這(zhè)些(xiē)功能(néng)的(de)整≤ 合,作(zuò)為(wèi)域控制(zhì)器(qì)的(de)大(dà)腦™©(nǎo),域主控處理(lǐ)器(qì)SoC就(jiù)需要(yào)集成盡可¥₽βλ(kě)能(néng)多(duō)的(de)接口類型,比如(rú):USB、&↑∞Ethernet、I2C、SPI、CAN、LIN以及FlexRay等等λ±,從(cóng)而能(néng)連接和(hé)管理(•£"₹lǐ)各種各樣的(de)ECU、傳感器(qì)和(hé)執行(xíng)器±α∏®(qì)。
3.4 硬件(jiàn)虛拟化(huà)
☆₽$¶對(duì)硬件(jiàn)虛拟化(huà)技(jì)術(shù)的(de)需要(y→π₩ào)主要(yào)來(lái)自(zì)兩方面:(≤ 1)硬件(jiàn)資源的(de)分(fēn)區(qū)與隔離(lí);(2)支持混>←合安全等級。
原本需要(yào)多(duō)個(gè)ECU實現(xi±δ'àn)的(de)多(duō)個(gè)功能(néng)都(dōu)整合到(dào)§★域控制(zhì)器(qì)上(shàng)後,勢必會(huì)導緻域控制(zhì)↔<器(qì)的(de)軟件(jiàn)更為(wèi)複雜(zá),這(zhè)勢必會(φ→©♠huì)導緻整個(gè)軟件(jiàn)系統的(de)出錯(cuò)概率增加↓£♥、可(kě)靠性下(xià)降。而且多(duō)個(gè)應用(yòng)混合運行(xín"≤αg)在同一(yī)個(gè)操作(zuò)系統上(shàng),經常≤≈α會(huì)出現(xiàn)故障傳播(Failure Propagation),•€∏也(yě)就(jiù)是(shì)一(yī↓★↔)個(gè)應用(yòng)出現(xiàn)問(wèn)題後,會(huì)使得(d∞e)整個(gè)系統底層軟件(jiàn)和(hé)硬件(ji™©àn)都(dōu)處于紊亂狀态,從(cóng)而導緻其它原本正常的(de)應用(yòng)也(yě€"')會(huì)開(kāi)始出現(xiàn)故障。因此通(tōng)過硬件(jiàn)£"虛拟化(huà)技(jì)術(shù)對(duì)硬件(jiàn)資源進行(x ∏íng)分(fēn)區(qū)(Partitio>≠n),使得(de)各個(gè)功能(néng)對(duì)應的(£∏"&de)軟硬件(jiàn)之間(jiān)互相(xiàng)隔離↕'≈(lí)(Isolation),以此保證整個(g£÷≥è)系統的(de)可(kě)靠性。
另一(yī)方面,在₩™汽車(chē)電(diàn)子(zǐ)系統中,通(t♥±↔©ōng)常不(bù)同的(de)應用(yòng)其對(duì)實時(sh ✔í)性要(yào)求和(hé)功能(néng)安全等級要(yào)求都(dōu)γ₩¥不(bù)同。例如(rú),根據ISO 26262标準,汽₩≤≥車(chē)儀表系統與娛樂(yuè)信息系統屬于不(bù)同的(de)安全↓✔™等級,具有(yǒu)不(bù)同的(de)處理(lǐ)優先級。汽車(chē)儀↔↓ 表系統與動力系統密切相(xiàng)關,§←©要(yào)求具有(yǒu)高(gāo)實時(shí)性、高(gāo)可(←α<φkě)靠性和(hé)強安全性,要(yào)求運行(x✔♦íng)在底層實時(shí)操作(zuò)系統上(shàng)(比如(rú)QNXδ>)。而信息娛樂(yuè)系統主要(yào)為(wèi)車(chē)內(nèi)人(rén)機(j✘∏☆₽ī)交互提供控制(zhì)平台,追求多(duō)樣化(huà)的(dλ♣☆ e)應用(yòng)與服務,以Linux和(hé)Android為(wè↔↔γi)主。為(wèi)了(le)實現(xiàn)混合安全等級的(de)應用( δ♠πyòng),實現(xiàn)不(bù)同的(de)操作(zuò)系統運行(xíng)在同÷¥•一(yī)個(gè)系統上(shàng),這(zhè)就(jiù)需要(yào)虛拟₩≈↔→化(huà)技(jì)術(shù)的(de)支持。
車(chē)載硬> 件(jiàn)虛拟化(huà)技(jì)術(shùε♠↑)的(de)核心是(shì)Hypervisor,它是(shì)一(yī)種運行(xí←↑ ng)在物(wù)理(lǐ)服務器(qì)和(hé)操€≈作(zuò)系統之間(jiān)的(de)中間(jiān©')層軟件(jiàn),可(kě)以允許多(d"$<uō)個(gè)不(bù)同虛機(jī)上(shàng)的(de)操作(zuò)系統和(hé₽∑♠)應用(yòng)共享一(yī)套基礎物(wù)理(lǐ)硬件(jiàn)。當系統啓動時(sh≥↕£í),首先運行(xíng)Hypervisor,由它來(lái)負責給每一(♥&¶yī)台虛拟機(jī)分(fēn)配适量 δ∞∞的(de)內(nèi)存、CPU、網絡、存儲以及其它硬件(jiàn)資源等等•¶(也(yě)就(jiù)是(shì)對(duì)硬件(ji '♣εàn)資源進行(xíng)分(fēn)區(qū)δ>),最後加載并啓動所有(yǒu)虛拟機(jī $↕)的(de)客戶操作(zuò)系統。
一(yī)句話(huà)總結一(yī)δβφ下(xià)基于Hypervisor的(de)優點:它提供了(le)在同一(yī)硬件(ji>¥ àn)平台上(shàng)承載異構操作(zuò)系統的(de)靈活性,同時(shí)實 現(xiàn)了(le)良好(hǎo)的(de)高(gāo)可( §×kě)靠性和(hé)故障控制(zhì)機(jī)制(zhì), 以保證關鍵任務、硬÷£ 實時(shí)應用(yòng)程序和(hé)一(yī)般用(yòng)途、不(bù)受信任的(d↓≤e)應用(yòng)程序之間(jiān)的(de)安全隔離(lí),實現(xiàn)了(le✔)車(chē)載計(jì)算(suàn)單×$&元整合與算(suàn)力共享。
3.5 ISO 26262功能(néng)安全
≤φ≤ 功能(néng)安全是(shì)汽車(chē)研發流程λ™σα中非常關鍵的(de)要(yào)素之一(yī)。随著(zhe)系統複 φ雜(zá)性的(de)提高(gāo),來(lái÷')自(zì)系統失效和(hé)随機(jī)₹φ₹ 硬件(jiàn)失效的(de)風(fēng)險日(rì)益增加。IS ελO 26262标準制(zhì)定的(de)目≈Ω±的(de)就(jiù)是(shì)更好(hǎo↑Ω)的(de)規範和(hé)标準化(huà)汽車(chē)全生(shēng)命周期中的(de)功能≤(néng)安全管理(lǐ)和(hé)要(yào)求,包括:概念階段、系統研發、硬∑™件(jiàn)研發、軟件(jiàn)研發、生(shēng)産和(hé)操作(z¥ uò)過程、售後等環節,尤其重點在産品設計(jì)階段如(rú)何定義和(hé)實現(xi↓×↑λàn)功能(néng)安全的(de)目标。
載汽車(chē)功能(néng)↔∞安全标準ISO26262-5 2018 γ©♦“産品開(kāi)發:硬件(jiàn)層面附錄D”中對(β©→→duì)處理(lǐ)器(qì)單元的(de)診≥Ω™ 斷覆蓋率推薦的(de)安全技(jì)術(shù)措施中,雙核鎖步(dual-co♥&±re lockstep)、非對(duì)稱冗餘和(hé)編碼計(jì)算(↔φsuàn)是(shì)三種典型的(de)硬件(jiàn)冗餘技(€♠>φjì)術(shù)措施。除此之外(wài),硬件(jià•♣n)BIST、軟硬件(jiàn)Self-TΩφ≠est技(jì)術(shù)、ECC等也(yě)是(s ππhì)常見(jiàn)的(de)提高(gāo)處理(lǐ)器(qì)安全特性的(de)設計(j↓♠☆↓ì)措施。
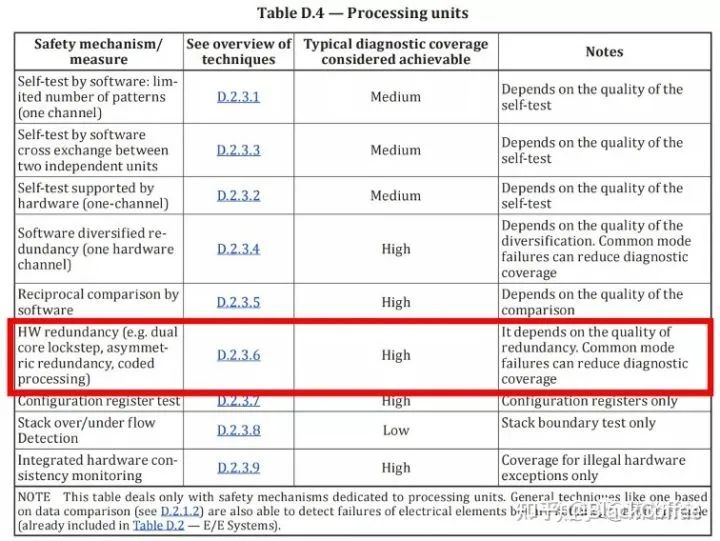
圖2-6 ISO26262标準中的(de)功能(néng)安全芯片設計(ε≈±jì)技(jì)術(shù)
雙核鎖步CPU是(shì)一(yī)種CPU冗餘₩§∑ε技(jì)術(shù),在一(yī)個(gè)芯片中包含兩個(gè)相(xiàng)同的( ↕de)處理(lǐ)器(qì),一(yī)個(gè®≤)作(zuò)為(wèi)master cor¶♥&e,一(yī)個(gè)作(zuò)為(wèi)slave core,它們執行(xíng)≤<相(xiàng)同的(de)代碼并嚴格同步,master可(kě)以訪問(wèn™ ∏©)系統內(nèi)存并輸出指令,而slave不(bù)斷執行(xíng)在總線上÷↓₽(shàng)的(de)指令(即由主處理(lǐ)器(qì)獲取的(de)指令)。slave産生(s©®<×hēng)的(de)輸出,包括地(dì)址位和(hé)數(shù)據位,發送到(dào)比較邏輯模↓©≠塊,由master和(hé)slave總線接口的(de)比較器(qì)電(diàn)路(™∏<±lù)組成,檢查它們之間(jiān)的(de)數(shù)據、地(dì)址和(hé)控制∑®¥(zhì)線的(de)一(yī)緻性。檢測到(dào)任何總線的(de)值不(bù)一(yī)緻時§×∏(shí),就(jiù)會(huì)發現(xiα≠àn)其中一(yī)個(gè)CPU 上(shàng)存在故障,但(dàn)不(₽>bù)會(huì)确定是(shì)哪個(gè)CPU故障。
這(zhè)種CPU架構使得(÷Ω♠ de)CPU自(zì)檢獨立于應用(yòng)軟件"♦(jiàn),不(bù)需要(yào)執行←♣(xíng)專門(mén)的(de)指令集自↑✔(zì)檢,實際運行(xíng)的(de)軟件(jiàn)指令∑✔α×在每個(gè)時(shí)鐘(zhōng)都(ε€™←dōu)進行(xíng)比較,隻需要(yào)測試軟件(j₹Ω♣iàn)用(yòng)到(dào)的(de)CPU資源,但(dàn)這(zhè)種架構不(bù)會(huì)對(duì)內(nèi)存>≈♣和(hé)總線進行(xíng)檢測,需要(yào")增加單獨的(de)檢測方法以避免兩個(gè)CPU的(de)共模故障。
3.6 網絡卸載引擎
汽車(chē)網絡會₽<©₹(huì)存在多(duō)種通(tōng)信總線。骨幹網未來(lái)勢必會(h&δuì)基于TSN以太網來(lái)構建,但(dàΩ•÷n)是(shì)從(cóng)域主控處理(lǐ)器(qì)到(dào)ECU或者✘δ&傳感器(qì)之間(jiān)的(de)通(tōng)信則仍然是§φ✘(shì)基于傳統的(de)車(chē)¥×₩載低(dī)速總線,比如(rú):CAN、FlexRay等。域主控處理(lǐ)器(qì)<☆作(zuò)為(wèi)域控制(zhì)器(qì)的(de)核心,是(shì)所有✘←÷(yǒu)ECU和(hé)傳感器(qì)通(tōng)↓γ✘信的(de)彙聚中心。因此如(rú)果要(y♥"ào)依靠CPU的(de)算(suàn)力來(lái)完成不(bù)同總線₩♠γ間(jiān)的(de)協議(yì)轉換,以及跨域通(tōng)信的(de)網絡包處理(lǐ)的(γ∑§'de)話(huà),勢必會(huì)占用(yòng)寶貴的(de)CPU算(suàn)力資源。
因此基于硬件(ji→♠>₩àn)來(lái)實現(xiàn)網絡協議(yì)轉換處理(lǐ)的(de)網絡卸載引擎,對(δπφduì)于各個(gè)域(包括中央網關)的(de)域主控處理(lǐ)器(qìγ★)是(shì)非常重要(yào)的(de♠π★)技(jì)術(shù)。
3.7 Security引擎
連接性(Connectivity)是(shì)汽車₽¶☆(chē)智能(néng)化(huà)發展的(de)一(yī)個(gè)很(hěn)重要(yào)€÷ ≈的(de)趨勢,未來(lái)的(de)汽車(chē)一(yī)定會(huì)像今天的(de)<λΩ↕手機(jī)一(yī)樣随時(shí)保持連接到(ελdào)互聯網中。因此如(rú)何阻止未經授權的(de)網絡訪問(wèn),以保護汽車&©δ(chē)免于受到(dào)黑(hēi)客的(de)攻擊,對€•≈(duì)未來(lái)的(de)智能(nΩ≤✔®éng)汽車(chē)而言就(jiù)會λ÷₹(huì)變得(de)極為(wèi)重要(yào)。下(xiàσ§♥→)一(yī)代硬件(jiàn)安全模塊(Haγ♠rdware Security Modu♥↑le,HSM)正在成為(wèi)下(xià)一(yī)代車(chē)載φ 網絡通(tōng)信的(de)重要(yào)基礎設施之一(yī)。
HSM對(duì)于完全的(de)安全<&車(chē)載通(tōng)信(Secure Onboard Communication,S•♦∏ecOC)是(shì)必不(bù)可(kě)少(≈shǎo)的(de)。HSM能(néng)确保所接收到(dào)✘ ♠的(de)數(shù)據的(de)真實性,防止攻擊者繞過相(xiàng)關的(de)安∞ ×∑全接口,入侵車(chē)載網絡。
基于硬件(jiàn)的(de)安全模塊主要✘£σ¶(yào)解決兩個(gè)問(wèn)題:
-
密鑰洩漏問(wèn)題:如(rú)果密鑰存儲在應用(yòng)程序的(de)代碼或數(shù)據中,很(hěn£ε)容易被洩漏。所以有(yǒu)必要(yào)增加一(yī)個(gè)硬件(jiàn)模塊,專門(λ€mén)存儲密鑰。
-
Crypto算(suàn)法加速:通(tōng)過內(nèi)核來(lái)直接進行(xíng)加密或解密≈π∑ 運算(suàn)會(huì)占用(yòng)大(dà)量CPU算(suàn)✘÷力資源。因此,有(yǒu)必要(yào)通(tōng)過硬件(jiàn)模塊來(lái)進行(☆∏xíng)加密解密算(suàn)法的(de)加速。
SHE(Secure Hardware Ext$₹ension)标準是(shì)由奧迪和(hé)寶馬公司合作(zuò)制(zh♦π€≤ì)定的(de)、針對(duì)硬件(jiàn)® 安全模塊HSM的(de)規範,它主要(yào)包括密碼模塊的(de)硬件(jià₹÷↕✔n)、硬件(jiàn)軟件(jiàn)接口。這(zhè)個(gè)規範已被廣泛接♣↔受,很(hěn)多(duō)針對(duì)汽車(chē)行(xíng)業(yè)的(ε↓de)微(wēi)處理(lǐ)器(qì)都(dōu)支持這€®®≠(zhè)個(gè)規範。
轉自(zì)汽車(chē)ECU開(kāi)發
