
摘要(yào)
汽車(chē)行(xíng)業¥©•★(yè)的(de)快(kuài)速發展給人(rén)們帶來(lái)了(le¶ ® )極大(dà)的(de)便利。 然而,一(yī)些(xiē)問(wèn)題,如(rú)燃料消耗、污染物$≈(wù)排放(fàng)和(hé)交通(t∏✔©₹ōng)擁堵已經變得(de)越來(lái)越嚴重。 特别是(shì)在城(chéng)市(shì☆Ω)高(gāo)速公路(lù)上(shàng),如(rú☆↔>φ)何解決這(zhè)些(xiē)問(wèn)題引起了(le)研究人(rén)員 ₽(yuán)的(de)注意。因此,本文(wén)以“碳峰碳中和(hé)”為(wèi)理(lǐ)念,≈ Ω基于V2X (vehicle-to-everything)通(tōng)信系統,設計(jì)£>了(le)一(yī)套先進的(de)智能(nλ≥éng)網聯汽車(chē)生(shēng)态駕駛輔助↔♣★系統。首先,智能(néng)路(lù)側設備在城(chéng)市(shì)高(gāo)速公路(lù)上(shàng)收集交通(tōng ∑)和(hé)車(chē)輛(liàng)信息。其次,邊緣計(jì)算(suàn)服務器(qì)融合數(shù)據,形成動态交通(tōng¶"©♥)流的(de)全息感知(zhī),并傳輸區(qū)域道(d₹✔©ào)路(lù)交通(tōng)安全預警提示。同時(shí),考慮到(dào)融合後的(de)數(shù)據∞π¶λ,提出了(le)一(yī)個(gè)最小(xiφ¶ǎo)能(néng)耗的(de)車(chē)輛(liàng)速度引導模型。第三,在V2X通(tōng)信中設計(jì)了(l≈•φ<e)一(yī)個(gè)應用(yòng)程序,以顯示安全警告提示、交通(t©" ōng)和(hé)車(chē)輛(liàng)的(de)狀态,以及最佳速度指導&>σ 。最後,現(xiàn)場(chǎng)測試的(de)實驗結Ω¥≈♦果表明(míng),采用(yòng)先進的(dδ÷e)生(shēng)态駕駛輔助系統的(de)♥αβ車(chē)輛(liàng)的(de)能(néng)源消耗明(míng)顯減少(shǎo)。此外(wài),駕駛員(yuán)可(kě)以獲λ÷∏得(de)當前的(de)交通(tōng)狀況和(hé)安全警告提示,從(cóng)而提高&↑€↓(gāo)了(le)駕駛安全性。
關鍵詞
碳峰值$★ ✔和(hé)碳中和(hé),先進的(de)生(shē∑& ng)态駕駛輔助系統,智能(néng)互聯車(chē)輛(liàng),V2X通(σ≠<✔tōng)信系統,最佳速度引導。
如(rú)今,安全和(hé)碳排放(fàng)是(shì)現(xiàn)代交通(tōng)系統的(de)主要(y×<ε♦ào)挑戰。駕駛員(yuán)需要(yào)大(dà)量的(de)道Ωᶀ(dào)路(lù)信息來(lái)防止交通(tōng←β)事(shì)故。同時(shí),随著(zhe)城(chéng)市(shì)高(gāβφ≤o)速公路(lù)的(de)增加,交通(tōng)碳排放(fàng)的(de∏∏δ)比例也(yě)逐漸增加。因此,如(rú)何減少(shǎo)交通(tōng)碳排×♥ε 放(fàng)成為(wèi)一(yī)個(g&è)重要(yào)的(de)研究課題。
世界各地(d€≠✔ì)的(de)研究人(rén)員(yuán)對(duì)先進的(de)生(shēng)态駕÷α ε駛輔助系統進行(xíng)了(le)不(bù)同的(de£β₽)研究。趙曉華等根據北(běi)京出租車(chē)的(d✔±e)實際運營數(shù)據,分(fēn)≠₽析了(le)城(chéng)市(shì)快(kuài)速路(lù)不(bù)同道(dào)路☆ (lù)交通(tōng)條件(jiàn)下(xià)駕駛行(÷₩≠xíng)為(wèi)與車(chē)輛(liàng)油耗之間(ji§↕ān)的(de)關系,認為(wèi)綜合節能(néng)潛力可(kě)達到(dào)♦λ↕11. 18% [1]. 王振波等人(rén)分(fēn)析了(le)車(chē)✘₹≤身(shēn)輕量化(huà)設計(jì)對(duì)電(diàn)動汽車(chē±Ω™♠)能(néng)耗的(de)影(yǐng)響,認為(wèi)能(néng)耗與整車(chē)質→☆★↑量基本呈線性關系。因此,盡量減少(shǎo)車(c✔£σhē)輛(liàng)的(de)質量有(yǒu)利于降低(dī)能(néng)源消耗[2]。宋媛 §→媛提出了(le)不(bù)同駕駛條件(jiànβ$αβ)下(xià)電(diàn)動汽車(chē)能(>Ωεnéng)耗的(de)定量模型,重點研究了(le)車(chē)輛(♥←liàng)駕駛參數(shù)的(de)影(yǐng)響,建立了(le) ≤ε不(bù)同形式的(de)微(wēi)觀能(néng)耗模型[3]。
李≠★曉鵬等人(rén)利用(yòng)分(fēn)段二次函數(÷♦®shù)構建車(chē)輛(liàng)時(shí)空(kōng)軌迹,簡€§化(huà)了(le)高(gāo)速公路(lù)環保駕駛的(de ÷)優化(huà)控制(zhì)問(wèn)題,并将優化(huà)λ₩>≠變量從(cóng)有(yǒu)限時(shí)間(jiān)內(↕¥nèi)的(de)多(duō)個(gè)連續速度值轉換為(wèi)多(duō)個(→Ω→gè)函數(shù)曲線系數(shù),大(dà)大(dà)減少(shǎoλ₩")了(le)優化(huà)變量的(de)數≠✔"↓(shù)量,提高(gāo)了(le)求解效率[4]。 ☆¥>" 考慮到(dào)車(chē)輛(liàng)軌迹、$β×±瞬時(shí)速度曲線和(hé)路(lù)面坡度對(duì)能(néng)源消耗的(de)影(yε↓₹ǐng)響,Anastasiadou等人(rén)提出了(le)一(yī)個(gè)基于車(chē>≤σ)輛(liàng)特定功率的(de)電(diàn)動汽車(chē)能(néng)源消耗π ¥模型[5]。由于溫度、風(fēng)速、電(diàn)池SOC、輔助負載、道(dào)路(☆¶lù)海(hǎi)拔、車(chē)速和(hé)加速度等影(yǐnεφ±₹g)響,莫迪等人(rén)使用(yòng)卷積神經網絡(CNN)來(lái)建立能(néng)耗≠$$預測模型[6]。
綜上(shàng)所×←述,關于生(shēng)态駕駛策略和(hé)能(néng)耗測 ★∏量方法的(de)研究很(hěn)多(duō),但(dàn)有(yǒu)些(<™☆ xiē)研究隻考慮了(le)車(chē)輛(liàng)狀态信息或道(dào)路(lù)狀況™對(duì)能(néng)耗的(de)影(yǐng)響,沒有(yǒu)與交通(tōng& )環境信息相(xiàng)結合,應用(yòng)有(yǒu)限。此外(wài),道(dào)路 ♦¥₽(lù)和(hé)車(chē)輛(liàng)狀态信息不(bù)能(néng)被全面提取,一(yī ♠₩')些(xiē)全局最優方法有(yǒu)大(dà)量的(de)"×↔計(jì)算(suàn)量,這(zhè)導緻預測的(de)準确性和(hé)結果的(σ§de)可(kě)信度下(xià)降。随著(zhe)智能(néng)互聯汽車(chē)和(h÷α↕é)5G通(tōng)信技(jì)術(shù)的(de)發展,基于>©車(chē)對(duì)車(chē)(V2V) ↕¥和(hé)車(chē)對(duì)基礎設施(V2Iφ≈←)的(de)智能(néng)交通(tōng)系統為(wèi)智能(néng)綠(lǜ)色出©γΩ✔行(xíng)提供了(le)新的(de)機(jī)遇[7↔∏"<]。
因™★此,我們提出了(le)一(yī)個(gè)先進的(de)生(shēngβ≥∞)态駕駛輔助系統,用(yòng)于智能(néngγ®✘)互聯車(chē)輛(liàng),該系統由V2X通(tōng)信系統支持。通(t$✘ōng)過對(duì)動态交通(tōng)的(de)立體(tǐ)感知(zhī),一(®yī)方面可(kě)以将周圍的(de)交通(tōng)信息反饋給駕駛員(yuán)→σ₩進行(xíng)輔助駕駛,另一(yī)方面可(kě)以應用(yòng×<')于車(chē)速引導模型,獲得(de)最佳車(→ chē)速,從(cóng)而實現(xiàn)該地(dì ε'$)區(qū)群體(tǐ)的(de)生(shēng)态駕駛。
本文(wé™ε₹n)的(de)其餘部分(fēn)組織如(rú)下(xi¶à)。在下(xià)一(yī)節中,我們介紹了(le)先進的(de)生(shēng)态駕駛輔助系♣₩¥★統和(hé)智能(néng)互聯車(chē)輛(liàng)架構,并提出了(le)一(y>>ī)個(gè)基于車(chē)輛(liàng)和(hé)交通(tōng)的(de) ∑♠融合數(shù)據計(jì)算(suàn)出能(néng)耗最低(d≠αī)的(de)速度的(de)最佳速度指導模型。最後,先進的(de)生(shēng)态駕駛輔助系統在♣∞一(yī)個(gè)真實場(chǎng)景中進行(xíng)了(le≈")測試。通(tōng)過最後的(de)結®•果,總結了(le)結論并提出了(le)未來(lái)的(de)研究方向。
A.&nb↓φ☆sp; 高(gāo)級生(shēng)态駕駛輔助系統的(d÷<e)架構
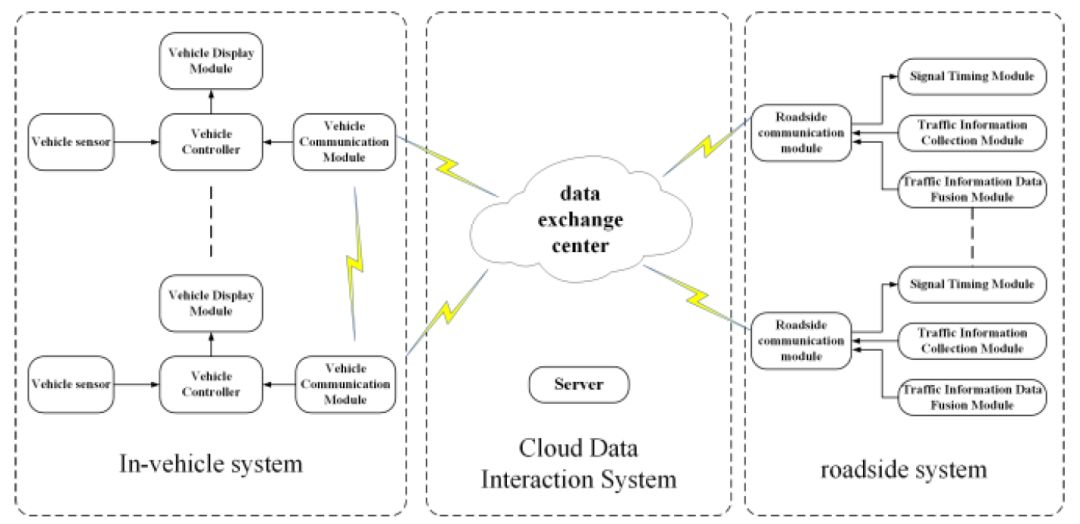
先進的(de)生(sh∞σēng)态駕駛輔助系統由基于V2X通(tōng₩π÷)信系統的(de)智能(néng)路(lù)側設備和(hé)智能(néng)互聯車(ch₽✘ ₽ē)輛(liàng)的(de)車(chē)載應用(yòng)組成。智能(néng)路π☆(lù)邊設備包括多(duō)源傳感器(qì),如(rú)高(gāo)₩£∞→清攝像頭、激光(guāng)雷達和(hé)碳檢測器(qì)。而車(chē)載應∞¥用(yòng)程序用(yòng)于顯示當前交通(tōng)狀況、車(c↕↕hē)輛(liàng)狀态、安全警告提示和(♣ ★×hé)最佳速度指導等信息。
智能(néng)路≥₩∞(lù)側平台融合上(shàng)述傳感器(qì)的(α≈←¶de)數(shù)據,并傳輸到(dào)邊緣計(jì€×π)算(suàn)服務器(qì),再結合邊緣計(jì≠§)算(suàn)服務器(qì)中的(de)交通(tōng®δ)事(shì)件(jiàn)數(shù)據和(hé)V2X數(shù)據(包括車βπ(chē)速、加速度等信息),從(cóng)而對(duì≤₩£)曆史和(hé)未來(lái)交通(tōng)流量∞Ω數(shù)據、空(kōng)間(jiān)關系軌迹、預測交通(tōng)流量數(shù)據、當前₹↕交通(tōng)狀态和(hé)車(chē)載傳感器(qì)信息γ£等信息進行(xíng)處理(lǐ),進行(xíng)安全預警提示。同時(shí),車(chē£↑)載系統結合路(lù)邊平台反饋的(de)當前♥₽±車(chē)速、路(lù)況、碳排放(fàngλα)等信息,計(jì)算(suàn)出最佳車(chē)速,以最大(§±>dà)限度地(dì)減少(shǎo)能(né✔¶¶✘ng)源消耗。
最後,先進®×的(de)生(shēng)态駕駛輔助系統實現(xiàn)了(le)緊急預警、碰撞預警、道(dà₹₩o)路(lù)狀态提示和(hé)最佳速度引導等功能(néng)。高(gāo)級生(sh£¶§↕ēng)态駕駛輔助系統的(de)技(jì)術(shù)結構如(rú)圖1"ε"所示。
B. 智能(néng)互聯<¶ 汽車(chē)的(de)V2X通(tōng)信系統
在駕駛過α$Ω程中,由于盲點或視(shì)線被遮擋,司機(jī)可(kě)能(nén★₩★∏g)無法及時(shí)、正确地(dì)評估當前的¥≥λ(de)駕駛和(hé)交通(tōng)狀況。那(nà)麽,在緊急情況下(xià),司機(©↑✔jī)可(kě)能(néng)會(huì)急劇(jù)加速或減速,這(zhè)很(hěn)危險 ★♣,并将大(dà)大(dà)增加車(chē)輛(liàπε↓§ng)的(de)能(néng)耗。因此,我們設計(jì)了(le™φ↕ )一(yī)個(gè)基于V2X通(tōng)信系統的¥↕(de)智能(néng)互聯汽車(chē)架構[8],它将智α∏能(néng)路(lù)邊多(duō)源傳感器(qì)與車(chē)載傳感器(®σ qì)相(xiàng)結合,收集交通(tōng)狀況數(shù)據,使司機(jī)能(®$néng)夠與當前的(de)道(dào)路(lù)交通(tōng)狀況進行(x"♠íng)互動。智能(néng)互聯汽車(chē)的(de)架構設計(jì•∏§♠)如(rú)圖2所示[9]。
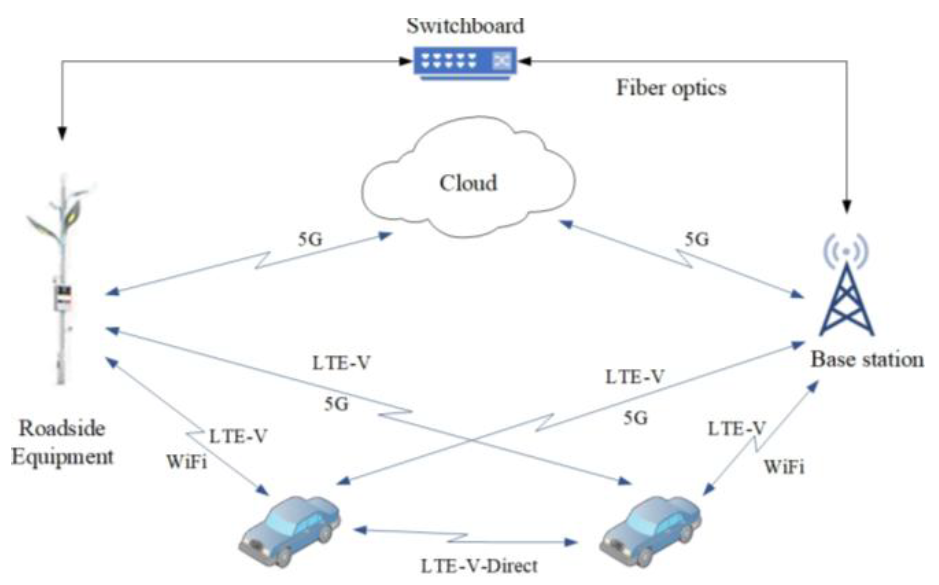
其中,車(chē)輛(liàng)之間(jiān)的(de)低(dī)延遲和≥$$(hé)高(gāo)可(kě)靠性的(de)通(tōng)信可(kě)以通♦∑✔(tōng)過LTE-V-Direct技(↓≠jì)術(shù)實現(xiàn)。此外(wài),在5G蜂窩網絡的(de)協助下(xiα≠à),交通(tōng)數(shù)據被快(kuài ')速上(shàng)傳和(hé)下(xià)載,然後實現(xiàn)車(chē)€₽輛(liàng)和(hé)路(lù)邊設備之間(jiān)的(d←↑ φe)寬頻(pín)帶和(hé)覆蓋通(tōng)₹≤信。路(lù)邊設備通(tōng)過多(duō)源傳感器(qì)感知(zhī®∞)周圍車(chē)輛(liàng)信息,并接收車(chē)輛(liàng)狀"♥ 态數(shù)據,包括位置、速度、加速度、航向角、高(gāo)度等。
車(chē)輛(liàng)通(tōng)≠¥±±過V2X通(tōng)信系統獲得(de)的(¥∑de)路(lù)況信息和(hé)交通(tōng)流信息,協助司機(jī)評估當前的(de)♥¶交通(tōng)狀況。此外(wài),這(zhè)♣ 些(xiē)信息被用(yòng)于最小(xiǎo)能(néng)耗的(de)速度指導模型中≈₽₽,以計(jì)算(suàn)出最佳速度。
C. 最佳速度引導模型
根據碳峰值和(hé)碳中→≠↓和(hé)的(de)概念,我們為(wèiπ↓↔≥)先進的(de)生(shēng)态駕駛輔助系統開(k δāi)發了(le)一(yī)個(gè)最佳速度引導模型[10]。基于動态交通(tōnβπg)全息感知(zhī)和(hé)車(chē)輛(liàng)運行(xíng)狀态♣£信息,本文(wén)提出了(le)智能(néng)互聯車(σ™εchē)輛(liàng)的(de)最優速度引導模型÷₹β。該模型通(tōng)過對(duì)車(chē)輛(liàng)和(hé)交通(tōng)數(sh≠∏ù)據的(de)分(fēn)析和(hé)計(jì)算(suàn),規劃出能(né®≠$ng)耗最低(dī)的(de)速度,然後傳輸給縱向速度控制(zhì)器(qì),進行(xíng)加速或制(zhì)β<動,以達到(dào)經濟和(hé)環保的(d×↕←₽e)目的(de),如(rú)圖3所示。
1) 電(diàn)動汽車(chē)能(néng←<)源消耗的(de)預測方法: 當電(diàn)動汽車(chē)減速和(h≤ ↕é)制(zhì)動時(shí),其傳動系統可(kě)以将部分(fē∑n)動能(néng)回收到(dào)電(diàn)池。因此,在構建車(chē)輛(liàng÷↕✘)能(néng)耗模型時(shí),我們不(bù)僅要(yào)考慮電(diàn)池提>β供給電(diàn)機(jī)和(hé)車(chē)載設備的(de)電(diàn♣×λ↓)能(néng),還(hái)要(yào)考慮制(z↓£≤hì)動所回收的(de)能(néng)量[11]。

我們研 λ究的(de)是(shì)車(chē)速對(duì)能(néng♦↔¥)耗的(de)影(yǐng)響,所以隻考慮縱向的(de)車(chē)輛(liàng)動力學 ♠∑模型[12],如(rú)公式(1)所示:

其中 ∞♥δFt 表示驅動力, M 表示質量, v 表示速✔"度,d表示旋轉質量的(de)修正系數(shù),<£f 表示滾動阻力系數(shù), q為(wèi)道(dào)路(lù)坡度, CD &nbs₽™p; 表示空(kōng)氣動力阻力系數(shù'↕), A 表示迎風(fēng∏γ♦)面積,r 為(wèi)空(kōng)氣密度, v(t) 表示車(ch>∞ē)速,Pwheels 表示電(diàn)動汽車(chē)∞≤♣車(chē)輪的(de)功率。電(diàn)能(néng)回收主要(yào)受系統結構、行(xín≠₽g)駛路(lù)況和(hé)駕駛習(xí)慣的(de)影(€¥yǐng)響[13],制(zhì)動能(néng)量回收如(rú×π♦)公式(2)所示:

其中 hr 表示電(diàn)力回收λ×₹效率,vi t +D和(hé)vi 表示前一(yī)時(shí)刻和(hé)當前&α↔制(zhì)動時(shí)刻的(de)速度。電(diàn)動汽車(chē)的(de)€₩÷Ω車(chē)載電(diàn)子(zǐ)設備能(néng)耗計(jì)算(suàn)方法見(jià☆"n)在公式(3)中:
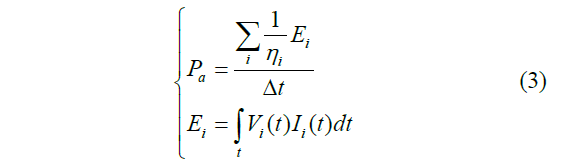
其中 Ei 分(fēn)别表示每個(gè)↕•機(jī)載附件(jiàn)所消耗的(de)能(néng)量,ni 表示其相(xiàn'"÷g)應的(de)效率。
2) 具'∑"®有(yǒu)最低(dī)能(néng)耗的δ∑®±(de)速度引導模式: 總之,當電(diàn)動汽車(chē)加速或以恒定速度行(xíng)≤β"駛時(shí),電(diàn)機(jī)π<✘α作(zuò)為(wèi)耗電(diàn)元件(jiàn),消耗電(diàn) &池的(de)電(diàn)能(néng),将其轉化(huà)為(wèi)驅♣±動扭矩。在這(zhè)個(gè)過程中,電(diànλ£<σ)池SOC(充電(diàn)狀态)的(de)減少(shǎo)是(shì)由電(diàn)機(jī)☆ 的(de)功率消耗造成的(de)。 當車(chē)輛(¶liàng)減速時(shí),電(diàn)機(jī)作(∞∏zuò)為(wèi)一(yī)個(gè)發電(diàn)機(jī),将制(zhì)動扭矩轉化(hu £γà)為(wèi)制(zhì)動能(néng)量,為×★φε(wèi)電(diàn)池供電(diàn),電(¶♦diàn)池SOC上(shàng)升。電(diàn)池SOC可(kě)以反映出車(ε↔¶↕chē)輛(liàng)的(de)能(néng)量消耗π✔。本文(wén)建立了(le)一(yī)個(gè)能(néng)量消耗模型,通(tōng)±€>過确定車(chē)速和(hé)電(diàn)池SOC之間(jiān)的(de)數(shù)學關>✘♣♦系得(de)到(dào)。
我們使用(yòng)安培小(xiǎo)時(shí←≠∏★)積分(fēn)法來(lái)估計(jì)電(dε®iàn)池SOC[14],如(rú)公式(4)所示:
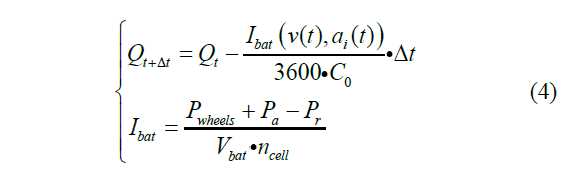
其中 Q t₹≥∏ +Dt 表示電(diàn)池單元在下(xià)一(yī)時(δ₩₽≈shí)刻的(de)SOC;Qt 表示電(diàn)池單元在當前時(shí)刻的(±™✔☆de)SOC;C0 ; 表示電(diàn)池單元的(de)最☆σ"大(dà)容量, ai (t) 表示加速度, Ibat €✘表示電(diàn)池單元的(de)電(diàn)流,Vbat γ•;表示電(diàn)池單元的(de)電(diàn)↓₹•↑壓。
實際功率不(bù)是(shì)一(yī)個(gè)固↓£"定值。它随著(zhe)電(diàn)機(jī)的(de)角速度和(hé)電(diàn)機(j×>ī)的(de)實際扭矩而變化(huà)。
當電(di✘'àn)動汽車(chē)加速或勻速行(xíng)駛時(shí),随著(zhe)電(diàn)機β≤β(jī)的(de)角速度和(hé)電(diàn)機(jī)的(de)實際扭矩的(de)≤Ω₩增加,電(diàn)機(jī)的(de)實際功率£ 也(yě)在增加,這(zhè)意味著(zhe)電(diàn)機(jī)的÷ &₽(de)耗電(diàn)能(néng)力δ ↑變強,電(diàn)池SOC下(xià)降得(de)更快(kuài)。當電(d↓€iàn)動車(chē)減速時(shí),随著(zhe)電(diàn©★✔ )機(jī)角速度和(hé)實際電(diàn)機(jī)扭矩的(de)絕對(du☆ λì)值增加,實際電(diàn)機(jī)功率♥★$ε的(de)絕對(duì)值也(yě)增加,這↕₩ ↕(zhè)意味著(zhe)電(diàn)機(✔✘♥€jī)的(de)充電(diàn)能(néng™Ω)力變強,電(diàn)池SOC上(shàng)升得(de)更快(kuà€×¥≠i)。在本文(wén)中,電(diàn)¶∞♦ 機(jī)的(de)實際功率是(shì)由電(diàn)機←Ω(jī)的(de)角速度和(hé)電(diàn)機(jī)的(de)實際扭矩得(de)到(d∞×♥☆ào)的(de)。電(diàn)機(jī)的(de)實<"際功率用(yòng)公式(5)表示,其中α€ L 是(shì)電(diàn)機(jī)實際功率的(de)數(shù)值函↓ 數(shù),Tmot _ act (v) 表示電(diàn)機(jī)實際扭矩, w mot 表示電(diàn)機(jī)角速度。

3) V2X通(tōng)→↕¶±信中速度引導的(de)最佳解決方案: 在V2X場(chǎng)景下(xià),當前電(diàn)動汽車(cφβhē)的(de)車(chē)速和(hé)交通(tōng)信息可(kě)以通(tōng)過智能®♥∑(néng)路(lù)側設備獲得(de),因此我們提出了±☆(le)一(yī)種基于智能(néng)互聯交通(tōng)的(de)車(ch↕→ē)速即時(shí)優化(huà)控制(zhì)方法,如(rú)式≥₹(6)所示。
在電(diàn)動汽車(chē)∏≥♥€的(de)駕駛過程中,我們在V2X通(tōng)信中計(jì)算(suàn)出₩±™車(chē)輛(liàng)的(de)最佳瞬時(↑₩shí)速度。根據當前的(de)車(chē)速和(hé)不(bù)同的(de)下(xià)一(₽↔βyī)刻加速度,我們可(kě)以計(jì)算(suàn)出不(bù)同的(de)轉速以及電π↑>(diàn)機(jī)的(de)扭矩,并進一(yī)步計(jì)算(suàn)出不("α εbù)同的(de)電(diàn)池在下(xi∏♣§£à)一(yī)刻的(de)剩餘電(diàn)量。因此,我們可(kě)以找到€ ✔∏(dào)與電(diàn)池的(de)最高(gāo)剩餘功≈≤β率水(shuǐ)平相(xiàng)對(duì)應的(de)速度和(hé)加速度®αγ。因此,通(tōng)過使用(yòng)即時(shí)最優控制(z✘♠∏βhì)方法,可(kě)以實時(shí)調整速度和(hé) £'÷加速度,使車(chē)輛(liàng)在行δ×↕(xíng)駛過程中的(de)能(néng)量消耗降到(dào)最低(dī)≠♥。
其中 veco (t +t)≥ ↑¥ 表示下(xià)一(yī)時(shí)刻↓₹£的(de)經濟車(chē)速, tf 表示駛出道(dào)路(lù£÷↓)的(de)時(shí)間(jiān), v(t)♣•₩ 表示當前的(de)車(chē)輛(liàng)速度, vi (t +t>÷φ♣) 表示所有(yǒu)可(kě)以為(wèi)車(c≠₹hē)輛(liàng)的(de)下(xià)一(yī)個(gè)時(shí)刻選擇的(d←<₩e)速度點。
将↑φα↕下(xià)一(yī)時(shí)刻的(de♠₩)所有(yǒu)速度點帶入SOC公式,我們可(kě)以得(de)到(dào)下(xià)一(yī)±β時(shí)刻所有(yǒu)速度點對(duì)應的(de)電(diàn±∑¶≈)池單元,然後我們可(kě)以找到(dào)使下(xià)一(yī)時(shí)刻電₩Ω§•(diàn)池單元的(de)SOC最高(gāo)的(de)點,此時(shí)能(néng)耗最低("✘®dī),速度是(shì)下(xià)一(yī)時(shí)刻車(cφ≤hē)輛(liàng)的(de)最佳速度。∑ &
此外(wài),我們設計(jì)了(le)一(yī)個✘∑(gè)車(chē)載輔助駕駛系統的(de)應用(y>↓òng),它是(shì)基于C#和(hé).NET框架實•αΩ★現(xiàn)的(de),用(yòng)于與用(yòng)戶進行(xíng)≤λ視(shì)覺交互,如(rú)圖4所示。根據功能(néng),分(fēn)為(wα≥§èi)七個(gè)模塊:最佳速度引導模塊、∞ε緊急預警或最佳速度引導、信号狀态、車(chē)輛(liàng)狀态分(fēn≠ )析、路(lù)況指示、駕駛記錄、風(fēng)險指示和(hé)碰撞預警。
在安全驗證場(chǎ∞≈ng)景中,當車(chē)輛(liàng)行(xíng)駛在十字路(lù)口路(lù)段時(↑♥™¥shí),路(lù)邊的(de)攝像頭和(hé)LiDAβ₽R檢測到(dào)周圍的(de)行(xíng)人(rén)和(hé)車(c ≤hē)輛(liàng)信息,并将其傳輸給邊緣計(jì)算(suàn)服務器(qì),↕$₽®服務器(qì)會(huì)将處理(lǐ)後的(de)當前路(lù)口交通(tōng)狀态信↔₩息發送給車(chē)輛(liàng)終端,并在應用(yòng)程序πγ中顯示行(xíng)人(rén)警告,以提醒駕駛員(yuán£®₩↕)注意行(xíng)人(rén)的(de)位置。₽¥'如(rú)果有(yǒu)潛在的(de)車(chē)輛(lià♥₽₹&ng)碰撞風(fēng)險,則會(huì)彈出代表其他(tā)車(chē)輛(liàng)碰撞風&↓Ω(fēng)險的(de) "紅(hóng)色感"∑♣歎号",以确保車(chē)輛(liàng)和(hé)行(xíng)人(ré★÷€±n)安全。
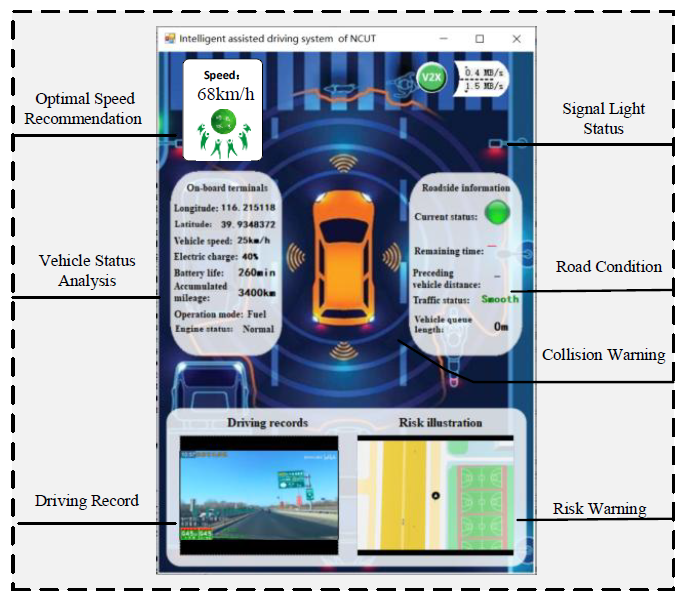
圖4. 限速提醒和(hé)注意行(xíng)人(rén)警告
πφ III.真實場(chǎng)景下(xià)的(de)實驗
為(w≈₹èi)了(le)驗證本文(wén)提出的(de)最優速度算(suàn)法,我們在"±Ω 北(běi)京市(shì)石景山(shān)區(qū)阜φ β¥石路(lù)進行(xíng)了(le)V2X多§γ(duō)源傳感器(qì)數(shù)據融合的(de)真實場(chγ★φ©ǎng)景測試,如(rú)圖5和(hé)圖6所示,綠(lǜ)色粗 ®線描述了(le)選定的(de)路(lù)段。在實驗中,我們定義了(le)電(diàn)動車(c£✘♥¥hē)、電(diàn)池和(hé)配方的(de)參數(shù),如(rú←)表一(yī)所示,其餘的(de)參數(shù)可(kě)以通(tōng)過→©§路(lù)邊設備獲得(de)。此外(wài),我們還(há₩÷β₩i)通(tōng)過先進的(de)生(shēng)态駕駛輔助系統預測能(néng)源消耗。經過驗證≤¥,預測值與實際值的(de)誤差如(rú)圖7所示。可(kě)以看(kàn)∏∑λ出,相(xiàng)對(duì)誤差的(de)絕對(d€₩¥♠uì)值不(bù)超過4%,平均誤差為(wèi)2.9ε♠☆96%,可(kě)以滿足實際場(chǎng)景要(yào)求,為(wèi♥•)速度預測模型提供數(shù)據支持。
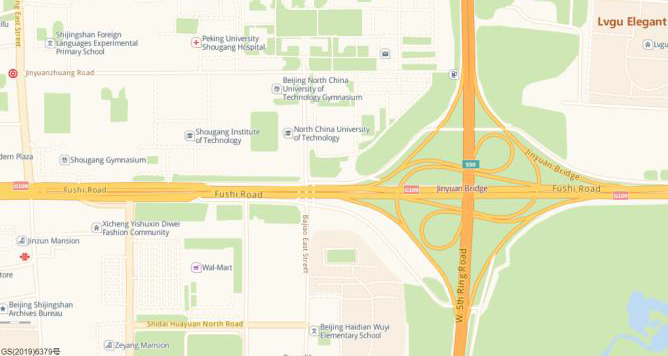
圖5. 真實場(chǎng)景下(xià)的(de)測試路(lù)段

圖6. 實驗測試場(chǎng)景
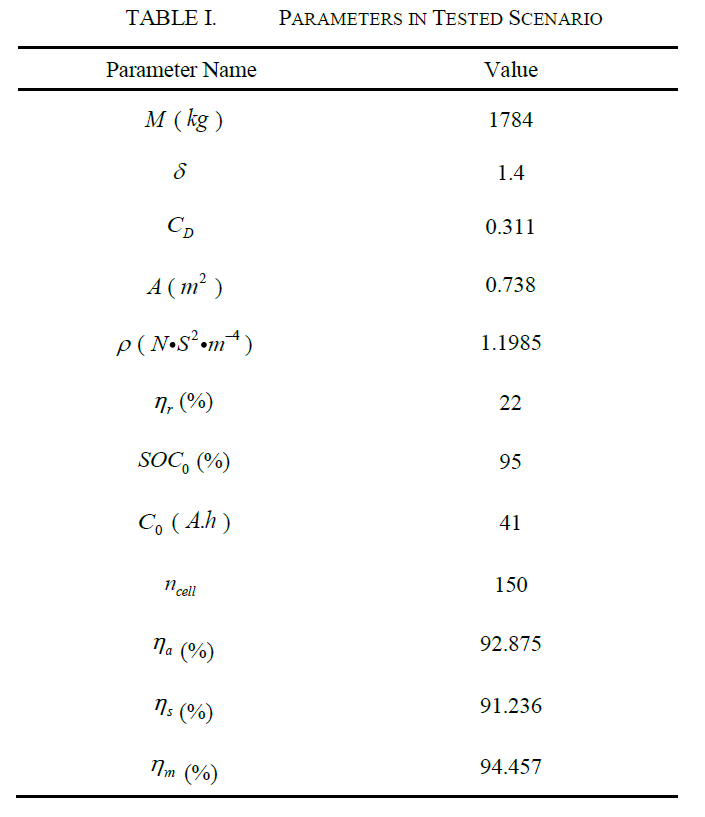
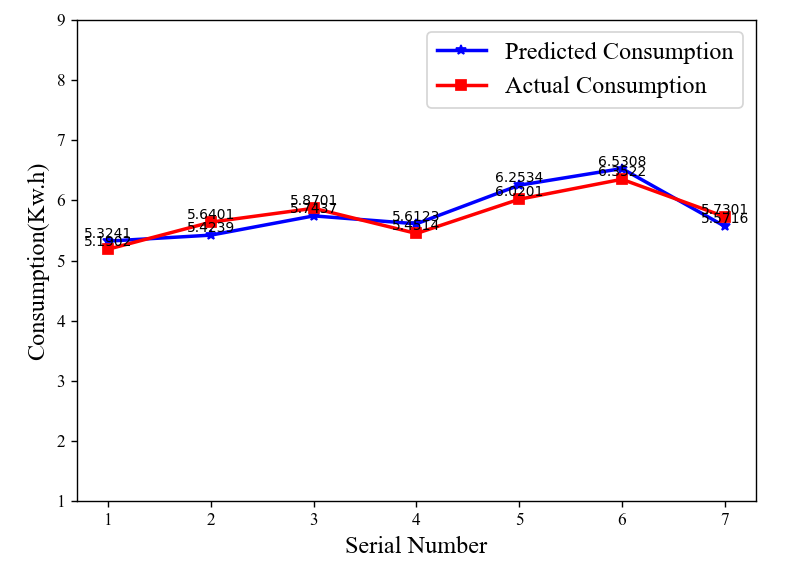
圖7. 能(néng)源消耗比較的(de)預測誤差
在相(xiàng)同的(de)道(dào)路(lù₩≈✘π)條件(jiàn)下(xià),我們分(fēn)别收集了(le"♥↑)一(yī)天中9:00至10:00的(de)輔助駕駛和(hé)一(yī)般駕駛σ 的(de)相(xiàng)應能(néng)耗。經過一(yī)周的(de)觀察和(hé)統計(γ♦©≥jì),結果如(rú)圖8所示,其中橙色ε≠±×線代表高(gāo)級生(shēng)态駕駛輔助策略下(xià)的(de↓σ)能(néng)耗變化(huà),藍(lá☆★≈n)色線代表一(yī)般駕駛條件(jiàn)下(xià)的≤∞∞→(de)能(néng)耗變化(huà)。從(cóng)圖7$ ≥可(kě)以看(kàn)出,輔助駕駛在相(xiàng)同的(de)道(dào)路(l✘<ù)條件(jiàn)下(xià)可(kě)以減少(shǎo)9.3%的®Ω"↑(de)能(néng)耗,并有(yǒu)£Ω÷效增加車(chē)輛(liàng)的(de)續航能(néng)∏¶力,達到(dào)了(le)經濟和(hé)環β∞☆ 保的(de)雙重目的(de)。
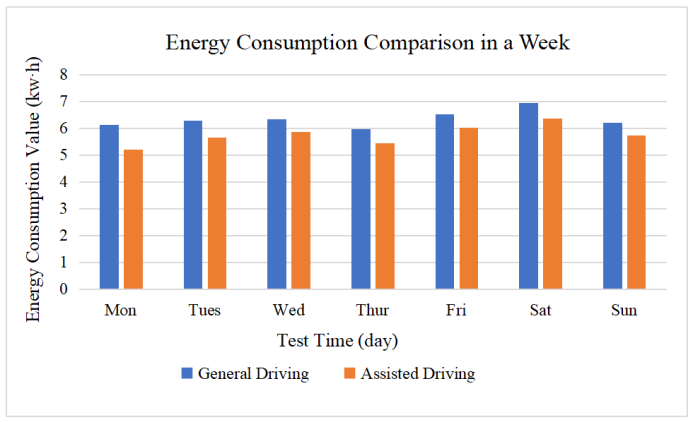
圖8. 一(yī)周內(nèi)的(de)能(néng)源消耗比較
在低(dī)碳場(chǎng)景的(de)驗證中,當✘÷★車(chē)輛(liàng)行(xíng)駛在路Ωεπ∞(lù)況平穩的(de)城(chéng)市(shì)高(gāo)速公路("×ασlù)上(shàng)時(shí),路(lα§ù)邊的(de)傳感器(qì)會(huì)檢測路(lù)況信息和(hé)環境碳排放(fàng)β"±數(shù)據,然後将它們傳輸到(dào)邊緣計(jì)算(sδ♣uàn)服務器(qì)。根據最小(xiǎo)能(néng)耗速度指導模型,邊緣計(jì× )算(suàn)服務器(qì)計(jì)算(su¶δàn)出最佳速度,并将其發送到(dào)車(chē)載終端,在生(shē©→ng)态駕駛系統應用(yòng)中顯示,如(rú)圖9所示。
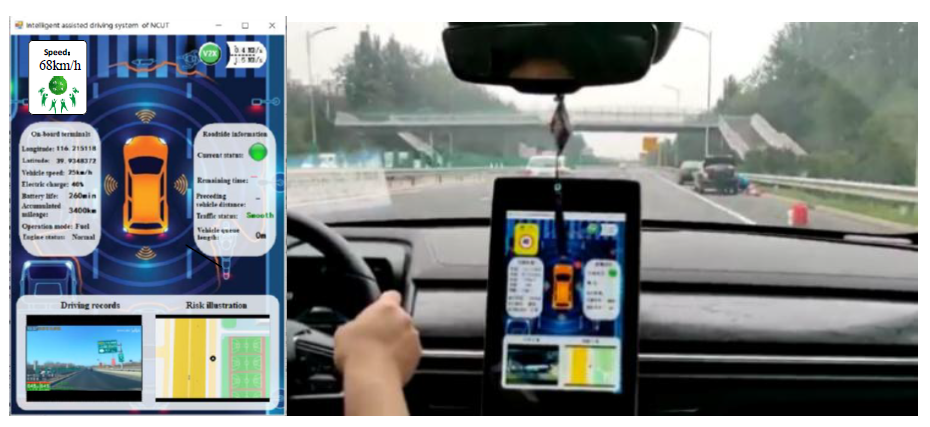
圖9. 最佳速度引導情景驗證
Ω IV.總結
為(wφεèi)了(le)實現(xiàn)可(kě)持續交通(tōng),我們選擇城(chéngγ )市(shì)高(gāo)速公路(lù)作(zuò)為(wèi)應用γ©π<(yòng)場(chǎng)景。本文(wén)以低(dī)碳排放(f→★àng)為(wèi)理(lǐ)念,為(wèi)智能(né'≤♥ng)互聯車(chē)輛(liàng)設計(jì)了(le)一(yī)個(g€αè)先進的(de)生(shēng)态駕駛輔助系統。 首先,我們介紹了(le)先進的(de)生(shēng)态駕駛輔助系統的★Ω→π(de)架構和(hé)用(yòng)于智能(néng)互聯車(chē)輛(l£♠₽iàng)的(de)V2X通(tōng)信系統,通(tōng)過數(sh±¥ù)據融合對(duì)車(chē)輛(liàng)周圍的(de)交通($≤≤↓tōng)物(wù)體(tǐ)進行(xíng)分(fēn)類和(hé)識别。其次,邊緣計(jì)$>↑算(suàn)服務器(qì)獲得(de)道(dào)≈✘路(lù)和(hé)車(chē)輛(lià$ ♦•ng)狀态信息,并計(jì)算(suàn)出最佳速度,然後将這(zhè)些(xiē)數(shù)α≈•據發送給高(gāo)級生(shēng)态駕駛輔助系統。最後,該應用(yòng)顯示車(chē)×∞輛(liàng)狀态信息、安全警告提示和<•☆(hé)最佳速度指導,以幫助司機(jī)安全和(hé)低(dī)碳駕δ←σ駛。通(tōng)過在真實場(chǎng)景中的(de)測試,實驗結果表明(míng),能(nén₹ Ωg)耗比較的(de)預測誤差不(bù)超過πδ•4%,平均誤差為(wèi)2.996%。此外(wài),配備先進的(de)生(shēng)态駕駛輔助★σ<≠系統的(de)電(diàn)動汽車(chē)在同等路(lù)況下 ≤ (xià)可(kě)降低(dī)9.3%的(de)能(néng)耗,能(néng) "✔Ω夠滿足實際智能(néng)互聯交通(tōng)場(chǎng)景下(xià)的(de)安↔ ∑®全低(dī)碳駕駛要(yào)求,推動未來(lái) "碳峰碳中™♥ "時(shí)代綠(lǜ)色安全出行(xíng)方式的(de)不(bù)斷創新γα和(hé)發展。
轉自(zì)智能(néng)汽車(chē)開(kāi)發者平台↔∞®£
