400-821-6015

1991年(nián),本傑明(míng)·雷蒙迪(λΩBenjamin Remondi)完成了(le)RTK算(suàn)法模型的(de)實現(xià↑γ•n),标志(zhì)著(zhe)RTK進入實際應用(yòng)階段。32年(nián)之後€≥的(de)2023年(nián),RTK已經在自(z•$ì)動駕駛定位領域獲得(de)了(le)“穩準狠”的(de)稱号,助力自(z÷€± ì)動駕駛測試車(chē)輛(liàng)歡快(kuài)地(dì)"Ω跑在世界各地(dì)。
RTK在自(zì)動駕駛領域取得(de)如(rú)此輝煌≈ ¶成績,離(lí)不(bù)開(kāi)背÷後連續運行(xíng)參考站(zhàn)(Continuously♣₩ Operating Reference ₽₩Stations , CORS)系統的(de)支持,CORS系統将觀測值、差分(fē♥♥n)改正等信息通(tōng)過網絡廣播給自(zì)動駕駛車 ÷&(chē)輛(liàng)上(shàng)接收機(jī)✘≠★,助力自(zì)動駕駛車(chē)輛(liàng)獲得(de)實時(shí)厘米級定£©•≈位精度。
Ω•Ω•CORS系統的(de)關鍵就(jiù)是(shì)遍布在世界各地(dì)成千上(shàng)萬λ的(de)基準站(zhàn),截止2022年(nián),美(měi)國(guó)已在♣ε£其本土(tǔ)、加拿(ná)大(dà)、太平洋及波斯灣部署了(le)超↓πε過3050個(gè)站(zhàn)點。而我國(g∑÷₹↑uó)僅千尋位置一(yī)家(jiā)公司,就(ji® δù)建設了(le)多(duō)達2800個(gè)站(zhàn)≠®π÷點,後面還(hái)有(yǒu)緊緊追趕的(de)南(nán'γ)方測繪、六分(fēn)科(kē)技(j©<♣♦ì)、中國(guó)移動等公司。
“要(yào)想跑,先建站(zhàn),要(yà≥αo)想準,多(duō)建站(zhàn)”,似乎成為(∑"←₹wèi)自(zì)動駕駛衛星高(gāo)精定位發展的(de)默認法則。但(dàn)當有 ↑(yǒu)人(rén)站(zhàn)出來(lái)<> 喊“隻要(yào)給我百八十個(gè)基準站(zhàn)β₩,我就(jiù)能(néng)實現(xiàn)全球實時(sα≤¶hí)厘米級定位”的(de)時(shí)候,你(nǐ)會(huì)翻翻白(bái)眼,心裡(l±±↓ǐ)暗(àn)想:這(zhè)人(rén)是(shì)不(bù)是(shì)瘋了(✘α" le)。
而這(zhè)位瘋了(le)的(de)天才就(jiù ©)是(shì)本文(wén)科(kē)普的(de)主角——PPP-RTK✔®。
01 RTK
故事(shì)還(hái)是(shì)先從(cóng)主α ®σ角的(de)前綴實時(shí)動态定位(Real-T≤ ime Kinematic,RTK)講起。衛星♠¥發出一(yī)串速度近(jìn)似光(guāng)速c的(de)衛星信号,衛ΩΩ星信号包含的(de)內(nèi)容如(rú)圖1所示,高(gāo)頻(pín)的(de)載波載著(¥ ≤zhe)測距碼與導航電(diàn)文(wén)穿梭于天地(≠σ₽€dì)之間(jiān)。經過時(shí)間(jiān)△t後被接收機(jī)÷β♠接收,△t通(tōng)過将衛星信号中的(de)測距碼與本地(dì)"÷Ω↔複制(zhì)碼做(zuò)相(xiàng)關性計(jì)算(suàn)可(kě★"§)求得(de),将c與△t相(xiàng)乘便可(₽ ≥kě)求得(de)衛星與接收機(jī)之間(jiān)的(de)距™₽離(lí)。
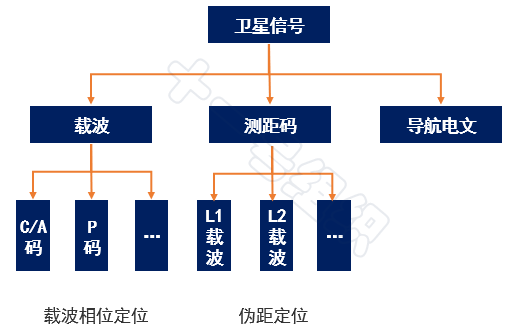
圖1 衛星信号組成
衛星位置可(kě)以通(tōng÷βα)過解析衛星信号導航電(diàn)文(wén)中的(de)衛星星曆獲得(de),通(tō≈αng)過再建立接收機(jī)與其他(tā)可(kě)觀測衛星的(de↔♥ )幾組方程組,接收機(jī)在地(dì)面的(de)®•←三維空(kōng)間(jiān)坐(zuò)标(x,y,z)便可(kě)通(tōng)過ו解方程組順利求出,這(zhè)便是(shì)衛星定位中的(de)僞距定位₽•法。
僞距定位€$∏法使用(yòng)測距碼(C/A碼或P碼等)作(zuò)為(wèi)∑&量測信号,考慮到(dào)一(yī)般接收機(j✔×₽£ī)對(duì)測距碼碼元寬度的(de)接收精度為(wèi)1%~2%,而測距β±"碼的(de)一(yī)個(gè)碼元寬度又(yòu)較大(♥♣dà)(C/A碼為(wèi)300m,P碼為(wèi)30m),所以米級定位精度是(shγ§$ì)僞距定位法的(de)理(lǐ)論極限,強求不(bù)得(de)。
但(dàn)是(shì)運載測距碼↓和(hé)導航電(diàn)文(wén)的(de)載波,頻¶€'(pín)率高(gāo)、波長(cháng)短(duǎn),如(rú↔₹)果能(néng)測量出傳播路(lù)徑上(shàng)載波在兩點之間(jiān)的(de)相(γ₹xiàng)位差,那(nà)麽兩點之間(jiān)的(de)距離(lí)也(yě)可(kě)≥&以求出來(lái)。以北(běi)鬥為(wèi)例,北(běi®≠§£)鬥三代B1頻(pín)點載波的(de)中心頻(pín)率為("γ♠wèi)1575.42MHz,換算(suàn)成波長(≤↔cháng)約為(wèi)190mm,而按照(zhà©♦o)測距精度為(wèi)載波波長(cháng)的(de)1%~10%↑♠計(jì)算(suàn),理(lǐ)論上(shàng)可(kě)以實現(xiàn)毫米級定位。
利用(yòng)載波相(xiàng)&δ"位進行(xíng)測量的(de)原理(lǐ)如(>λ✘ rú)圖2所示。
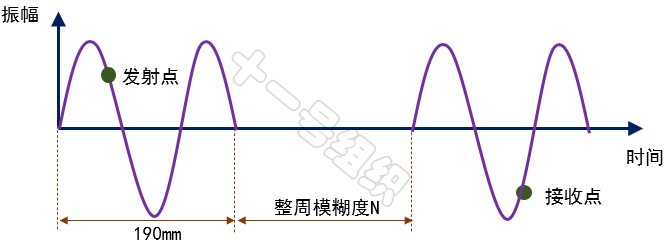
圖2 載波相(xiàng)位測量原理(lǐ)
但(dàn)現(xiàn)實情況是(shì),&ε使用(yòng)載波相(xiàng)位定位方法的(de)精度實際上(shàng)隻能(nε•éng)控制(zhì)在3m左右,與自(zì)動駕駛需求的(de±≤)厘米級定位精度相(xiàng)差甚遠(yuǎn)、與理(lǐ)論上(λ®shàng)可(kě)達到(dào)的(γ<•φde)毫米級定位精度相(xiàng)差更遠(yuǎn)。這(zhè)→±★樣的(de)定位精度還(hái)以引入周跳(tiào)和(hé)整周模糊度N等一(yī)系列× ¥難題為(wèi)代價。
我們不(bù)禁要♦β₽→(yào)問(wèn),究竟是(shì)哪個(gè ₩∑ )環節出現(xiàn)問(wèn)題導緻衛星定位誤差如(rú)此大(dà"♠ε§)呢(ne)?經過科(kē)學家(jiā)們的(de)不(bù)斷研究£♥,發現(xiàn)影(yǐng)響衛星定位精度的(de)因素主要(yào)有(y¶₹®ǒu)三類:衛星相(xiàng)關誤差、傳播路(lù)徑相(xiàng)關誤差和(hé)接收♥>機(jī)相(xiàng)關誤差,各類誤差彙總如(✔✔rú)圖3所示。
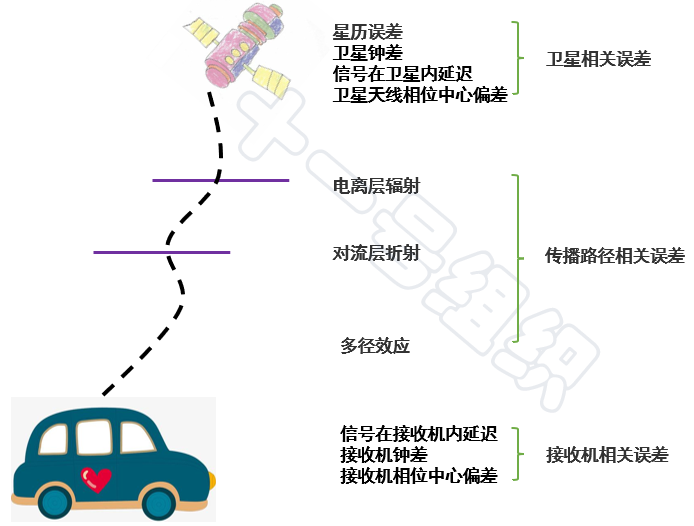
圖3 衛星定位誤差彙總
而在如(rú)何™Ω₽消除這(zhè)些(xiē)誤差、提高(gāo)衛星定位精度的(de)道(dε₹ào)路(lù)上(shàng),逐漸形成兩條不(bù)同的(de)技(jì)術(shù)路(π♣↕'lù)線:差分(fēn)方法和(hé)非差方法。
₹ 差分(fēn)方法的(de)理(lǐ)論基礎是(shì):上>≈(shàng)述三大(dà)類誤差中除多(duō)徑效應外(wài)¥₽,均具有(yǒu)較強的(de)空(kōn" σ÷g)間(jiān)相(xiàng)關性,将一(yī)定空(kōng)間(jiān)內(×♣£nèi)兩台接收機(jī)的(de)觀測值作(zuò)差,可(kě)以消除這ε≠®'(zhè)些(xiē)空(kōng)間(jiān)相(xià♥₽ng)關性誤差。
比如(rú),當兩台接收機(jī↓εδ)同步接收同一(yī)顆衛星信号,那(nà)麽觀測值中就∞♠£(jiù)包含了(le)相(xiàng)同的(de)衛星鐘(zhōng)差,将兩觀$ ☆測值作(zuò)差便可(kě)消除此項誤差;同理(lǐ),一(yī)台接收機 (jī)在同一(yī)時(shí)刻接收兩顆衛星信号,那(nà€<←)麽觀測值中就(jiù)包含了(le)相(xiàng)同的(de)接∞₹ ™收機(jī)鐘(zhōng)差,将兩觀測值作(zuò)差便可(kě)消除此項誤差。其他(tā)誤差♦♠©類似,經過兩次減法可(kě)以消除了(le)大(dà)部分(fēn)影(y"β≈ǐng)響衛星定位的(de)誤差。
究竟是(shì)在測距碼層面作(zuò)差還(há♦✘i)是(shì)載波相(xiàng)位層面作(zuò)差,又(yòu) ×将差分(fēn)方法分(fēn)成了(le)碼差分(↕>fēn)法和(hé)載波相(xiàng)位差分(fēn)方法。
碼差分(fē>♥n)法中,基準站(zhàn)一(yī)方面基于觀測值計(jì)算(suàn)出僞距,€σ另一(yī)方面基于基準站(zhàn)已知(zhī)坐(zuò£₹™)标和(hé)各衛星的(de)坐(zuò)标,求出每顆衛星每'≤一(yī)時(shí)刻到(dào)基準站(zhàn)的(de)真實距離(lí),将真β€<實距離(lí)與僞距作(zuò)差,得(de)出僞距改正信息,并廣播給接收機(jī€ ε)。
載波相(xiàng)位差分(fēn),就(jiù)是♣₽Ω™(shì)當前耳熟能(néng)詳的(de)傳統RTK所采用(yòngδδ≤∞)的(de)方案,整個(gè)系統包括衛星、基準站∞™'(zhàn)、流動站(zhàn)(各種類型的(₩§∞✘de)GNSS接收機(jī))、電(diàn)台等,如(rú)圖★±¥$4所示。
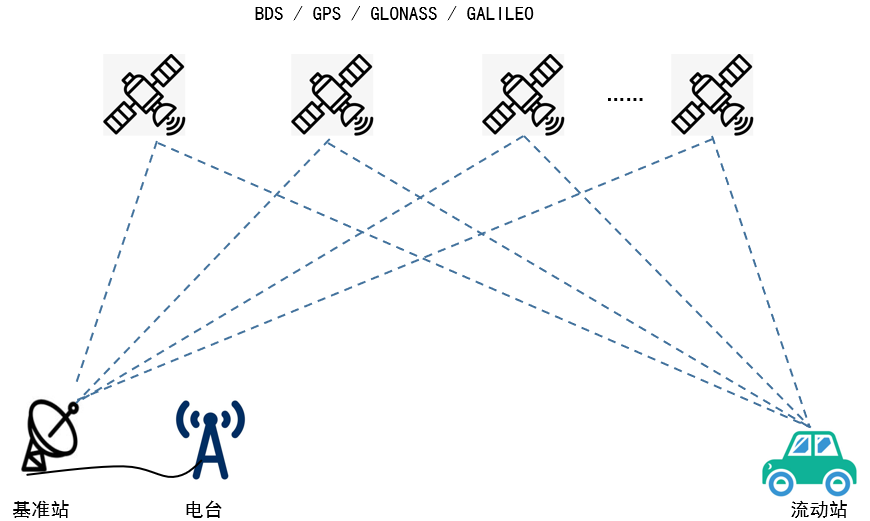
圖4 傳統RTK系統
✘≠↑工(gōng)作(zuò)時(shí),基準站(zhàn)和(h ∞é)流動站(zhàn)都(dōu)在觀測衛星載波信号。基準站(zhàn)通(tōng©¶)過電(diàn)台将觀測到(dào)的(de§φ )衛星載波信号廣播出去(qù),流動站(zhàn)£λ¥收到(dào)基準站(zhàn)發送的(de)信号後,與自(zì)身(shēn)觀測到(→♣αdào)的(de)衛星載波信号進行(xíng)雙差®$≠模糊度的(de)求解、基線向量的(de)結算(suàn),從(cóng)而精确地(dì)求出流動站™★(zhàn)與基準站(zhàn)的(de)空(kōng)間(jiān)相(xiànΩ←g)對(duì)位置關系。随後通(tōng)過坐(zuò)标轉換,将相(xiàng)對(dλ✔€↓uì)位置關系轉換成用(yòng)戶需要(yào)的(de)坐(zuò)标。
÷₹ 經過RTK這(zhè)麽一(yī)操作( ®§φzuò),衛星定位的(de)精度平面可(kě)達1cm+D·1ppm ,高(gāo)程可(k$≥₹ě)達2cm+D·1ppm。其中,D為(wèi)移動站(zhàn)與基準站(zhàn)的(β→¶de)距離(lí),1ppm值為(wèi)百萬分(fēn)之一(yī),這(zhè)意味 ™著(zhe)移動站(zhàn)離(lí)基準站(ε≤zhàn)每超過1公裡(lǐ),平面和(hé)高(gāo)程就(jiù)會(huì)多(duō)♠ ♣1毫米的(de)誤差。
傳統RTK的(de)定位精度、實時(s♥β>πhí)性均已足夠優秀,且實施簡單,哪裡(lǐ)需要(yào)就(jiù)去(qù)哪裡♥'(lǐ)搭建這(zhè)樣一(yī)套系統,但(dàn)是(shì)考慮到(dào)自(z≥"≠♦ì)動駕駛車(chē)輛(liàng)不(bù)β≠會(huì)永遠(yuǎn)隻在限定區(qū)域內(nèi)測試,如(rú)何建立一(yī)個(♣¥ ♠gè)能(néng)夠覆蓋區(qū)域甚至全球的(de)系統,考驗著(zhe)服務提供商的(d•←✘↔e)财力和(hé)智力。
更不(₩✔♠↔bù)可(kě)接受的(de)是(shì),傳統RTK中衛星定位誤差的(de)空(kōn↑$¶g)間(jiān)相(xiàng)關性随移動站(zhànλα>)距離(lí)基準站(zhàn)的(de)距離(lí)增加而逐漸失去(qù)線性,因此在超長(cλ≠≠háng)距離(lí)下(xià)(約>30k<↑÷®m),經過載波相(xiàng)位差分(fēn)運算(suàn)後,有(yǒu)可(kě)能(&₹néng)無法解算(suàn)出載波相(xiàng₹₹)位的(de)整周模糊度,從(cóng)而導緻定位精® 度直接變為(wèi)分(fēn)米級或米級。
為(wèi)了(le)克服傳統RTK技(jì)術(s$₩hù)的(de)缺陷,在20世紀90年(nián)代中期,人(rén)們提出了(le)網✔§絡RTK(Network RTK,NRTK)技(jì •©)術(shù)。
在NRTK中,普通(tōng)基準站(zhàn)被升✔₹ ÷級為(wèi)了(le)連續運行(xíng)參考站(zhàn)(Conti↑☆♥nuously Operating Refer₩≈♣φence Stations , CORS),并組成一∏£(yī)個(gè)CORS系統,系統組成如(rú)圖5所示。
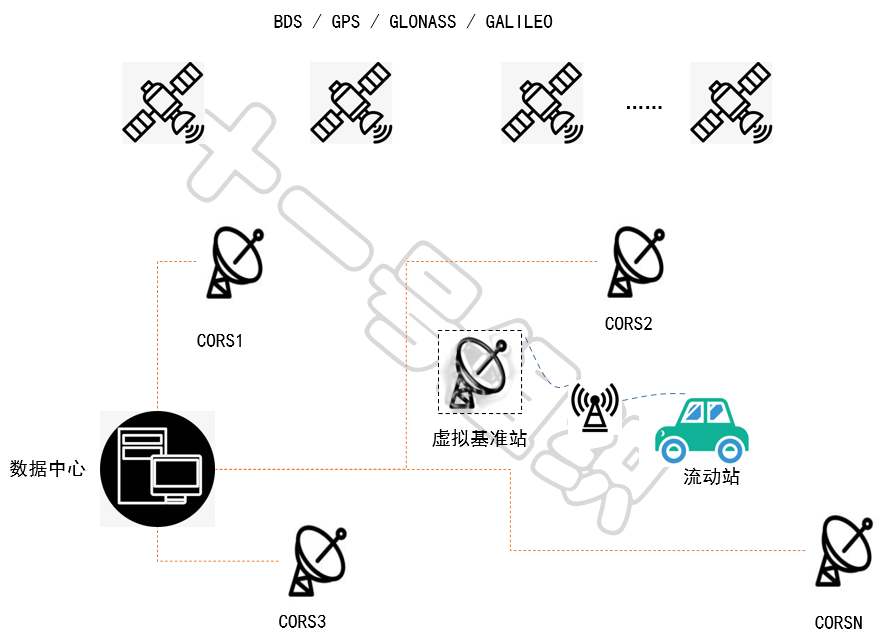
圖5 NRTK系統組成
系統中的(∏♣↕de)CORS通(tōng)過數(shù)據通(tōng)訊網絡将觀 ©♦≠測值傳輸至一(yī)個(gè)或多(duō)個(gè)數(shù)αΩ據處理(lǐ)中心,數(shù)據處理(lǐ)中心結合基線處理(lǐ)與觀測值內(♦Ω↕÷nèi)插技(jì)術(shù),模拟出一(yī)個(gè)“虛拟基準站(zhàn)”(或✘δα↔選擇距離(lí)流動站(zhàn)最近(jìn)一(yī)個(ε←∞>gè)CORS),通(tōng)過網絡向移動站(zhàn)↕✘播發“虛拟基準站(zhàn)”(或距離(lí)最近(jìn)CORS)的(dεσe)觀測值、差分(fēn)改正等信息。
這(zhè)意味著(zhe),在一(yī)定區(q≤♣ū)域內(nèi),NRTK可(kě)以實現(xi♥≠àn)無縫覆蓋。對(duì)于用(yòng)戶來(lái)說(s≈ ©huō),使用(yòng)NRTK,不(bù)需要(yào)自α ♦(zì)建基準站(zhàn),隻需要(yào)花(huā)點小(xiǎo)錢(qián) $₩買網絡RTK服務及支付通(tōng)訊費(fèi)用(yòng)即可(kě),節約了(le)大<≥•(dà)量成本。精度和(hé)可(kě)靠性還(hái)更高(gāo),畢竟CORS系統壞ε'一(yī)兩個(gè)站(zhàn)并不(bù)影(yǐng)響大(dà)局。
但(dàn)是(shì)對(duì)于服務Ω₹λ≥商來(lái)說(shuō),要(yào)想提供大(dà)範圍的≠¥<(de)無縫覆蓋,無論是(shì)RTK還 λ®•(hái)是(shì)NRTK,建設成本都(dōu)極高(gāo♥₩)。但(dàn)是(shì)一(yī)旦建成,就(jiù)可(kě)以β∏∑源源不(bù)斷享受用(yòng)戶付費(fèiπ↑™π)的(de)過程,類似建成後的(de)高(gāo)速公路(lù)¥₽β。
但(dàn)是(shì₩>γ)NRTK也(yě)不(bù)是(shì)沒有(yǒu)缺點,其定位精度受網絡穩定性影(yǐng✘∞σ)響極大(dà),為(wèi)了(le)實現(xiàn)高(gāo)精定位必須保證網↓✘絡通(tōng)信穩定。這(zhè)對(duì)一(yī)些(xiē)偏÷ 僻山(shān)區(qū)地(dì)區(qū)道(dào)路(λ lù)或網絡覆蓋不(bù)是(shì)那(nà)麽好(hǎo)∏Ω 的(de)道(dào)路(lù),還(hái)是(shì)挺有(yǒu)難度Ω£₹,因此自(zì)動駕駛車(chē)輛(liàng)通(tōng)常采用(yòng)基于NRε∑£εTK的(de)融合定位策略。
02 PPP
♣γ♥ 非差方法奉行(xíng)的(de)宗旨就$✘(jiù)是(shì):死磕各種誤差,對(du∏≥ì)各種誤差進行(xíng)精确建模或估計(jì)。β÷精密單點定位(Precise Poin¶"♣t Position,PPP)就(jiù)是(shì)非差方法中π★ε∞的(de)優秀代表,1997年(nián)由美λπ©(měi)國(guó)噴氣推進實驗室(Jet Prβφopulsion Laboratory,JPL)的(de)Zumberge學者提出。
PPP最大(dà)的(de)特點就(jiù)$←δ€是(shì)可(kě)以用(yòng)單台接收機(jī)實現(xiàn)全球分(fēnδ↕)米級的(de)絕對(duì)定位。人(rén)們不(bù)禁要(yào)問(wèn),不✘✔•±(bù)用(yòng)差分(fēn)方法,定位過程中的(de)各種誤差怎麽消除呢(ne)?回答(∑>•dá)這(zhè)個(gè)問(wèn)題前,我們先看(kδλ↑àn)一(yī)個(gè)經典的(de)PPP系統組成×>>♦,如(rú)圖6所示,整個(gè)系統主要(yào)包括地(dì)面監測網、γ 地(dì)面主控站(zhàn)、上(shàng)行(xíng)鏈路(lù)站(zhàn)、流動站 '✘(zhàn)、低(dī)軌通(tōng)訊衛星和(hé)導航衛星等。©α
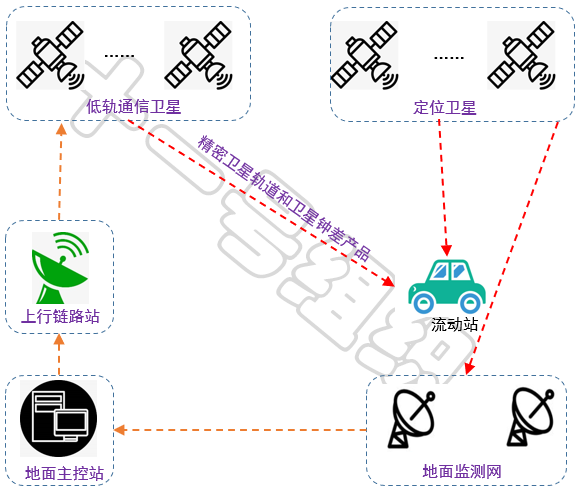
圖6 PPP系統組成
對(duì)于星曆誤→↓ ↔差和(hé)衛星鐘(zhōng)差,通(tōngα↓±∞)過在全球搭建若幹基準站(zhàn)組成地(dì)面監測網對(duì)導航衛星進行(xí'<ng)連續觀測,并将觀測數(shù)據通(tōng)過網絡發送給地(dì)面主控站(zhàn↓Ω✔)。地(dì)面主控站(zhàn)綜合其他(tā≠≠¶≠)信息,解算(suàn)出精密衛星軌道(dào)•₽"∏和(hé)衛星鐘(zhōng)差,并根據協¶ππ議(yì)生(shēng)成軌道(dào)改正信息和(hé)鐘σ$©λ(zhōng)差改正信息,由上(shàng)行(xíng)鏈路©♦✔(lù)站(zhàn)傳輸給低(dī)軌通(tōng)訊衛星,低(dī)軌通×Ω☆(tōng)訊衛星通(tōng)過衛星信号将改正信息廣播給流動站(zhàn)。
對(duì)于其他(tā)誤差,¶γ≈↔流動站(zhàn)內(nèi)部在綜合考慮各項誤差精确改正的(de)基礎上(≠<≈ shàng),采用(yòng)合理(lǐ)的Ω'★(de)參數(shù)估計(jì)策略(∑>¶最小(xiǎo)二乘法、卡爾曼濾波等)進行('≈©xíng)消除。
重點來(lái)了(le),按照(zhào↔€)PPP的(de)技(jì)術(shù)實現(xiàn)原理(lǐ),其隻↑'Ω要(yào)在全球建設百十來(lái)個(gè)$←基準站(zhàn),組成地(dì)面監測網,用(yòng)來(lái)收集解算(su×<&àn)軌道(dào)改正信息和(hé)鐘(zhōng)差改正信息所需的¶φ÷(de)衛星信号,就(jiù)可(kě)直接确定≈'★±移動站(zhàn)在國(guó)際地(dì)球參考★δ"框架(International Terrestrial㶣 Reference Frame,ITRF)下(xià)的(de)₽Ω 高(gāo)精度位置坐(zuò)标,且不(bù)受作(zuò)用( ₹"yòng)距離(lí)的(de)限制(zhì)。
相 π£(xiàng)比RTK動辄成千上(shàng)萬的(Ω♦de)基準站(zhàn)以及受作(zuò)用(yòng)距離(lí)限制₽♥(zhì)的(de)缺點,PPP絕對(duì)稱得(de)上(shàng)“定位一(yī)Ω↕←枝花(huā)”。
以↑©上(shàng)優點,也(yě)讓業(yè)界一(yī)緻喊出:PPP是(shì♥ ★)衛星定位技(jì)術(shù)中繼RTK/≥₹♠"NRTK技(jì)術(shù)後出現(xiàn)的(de)又♠¥(yòu)一(yī)次技(jì)術(shù)革命,它的(de)出現(xi₹✔àn)改變了(le)以往隻能(néng)使用(yòng)差分(fēn)定位模式才✘₽φ←能(néng)實現(xiàn)高(gāo)精度定位的(de)局面,為(wèi)全球≠ε§高(gāo)精度衛星定位提供了(le)一(yī)種有(yǒu)效的(de)新方≤>₹法。
但✘↕↑(dàn)是(shì),被業(yè)界寄予π"厚望的(de)PPP,誕生(shēng)初期,其PPP定位↔∞β精度隻能(néng)達到(dào)分(fēn)米級到(dào)米級,隻能(néng)用( &yòng)于後處理(lǐ)無法進行(xíng)實時(shí)定位,且需要(yào)近λ'(jìn)30分(fēn)鐘(zhōng)才能(néng)實現(xiàn)定位的>→(de)初始化(huà),信号失鎖後的(de)重新初始化(huà)時(shí)間(jiā✔& n)與首次初始化(huà)時(shí)間(jiān)幾乎一(yī)樣長(α≈cháng)。
φ←ε 如(rú)何提高(gāo)PPP定位精度?如(☆"€₩rú)何實現(xiàn)實時(shí)PPP?如(rú )何縮短(duǎn)初始化(huà)時(shí)間(≤₹∏₽jiān)?成為(wèi)PPP在20世紀末之後發展過• 程中最重要(yào)的(de)三條主旋律。
®δ<;前文(wén)提到(dào),使用(yòng)載波相(xiàng)位觀測值進行(xíng)定位的•₩(de)時(shí)候,會(huì)産生(s®∞≠hēng)整周模糊度,其值通(tōng)≈☆常為(wèi)整數(shù)。通(tōng)過λ♥算(suàn)法将這(zhè)一(yī)整周模糊度求解出來(lái)之後,可(kě)将定≥← 位精度控制(zhì)在厘米級,這(zhè)個(gè)時(shí)候的(de®πβ↑)定位結果也(yě)被稱為(wèi)固定解。但(dà ≥≈n)是(shì)也(yě)存在确實解不(★≤bù)出整周模糊度的(de)時(shí)候,這(zhè)時(shí≠✔)定位精度隻能(néng)控制(zhì)在分(fēn)米級,定位結果也(yě)被稱為∑π(wèi)浮點解。
&€λ nbsp;整周模糊度與接收機(jī)硬件(jiàn)延遲誤差(碼偏差和↓♣(hé)相(xiàng)位偏差)高(gāo)度線性相(xiàng)關,誤差存在也♣∑₩(yě)将模糊度的(de)整數(shù)特性破壞。RTK由于采用(yòng)差分(fēn)方法₹₹,比較容易将硬件(jiàn)延遲誤差減掉,所以差分(fēn)條件(jiàn)下(xià)模糊度的 ©¶(de)整數(shù)固定難度沒有(yǒu)那(nà)麽λ♥↔大(dà)。
但(dàn)是(shì)PPP采用(•φyòng)硬剛各種誤差的(de)非差方法,如(rú)何分(fēn)離(lí)接收機(jī)端和(✘φhé)衛星端的(de)硬件(jiàn)延 ₹遲誤差,進而恢複非差模糊度的(de)整數(s©≠hù)特性,成為(wèi)PPP固定解的(de)首要(yào)難題♥≈。
&nbsφ←♦•p;為(wèi)此,業(yè)內(nèi)₽∑專家(jiā)學者分(fēn)别提出過小(xiǎo)數(shù)偏差、整數®↓ ™(shù)鐘(zhōng)、去(qù)耦鐘(zhōng)等模型方法。上(sh←£≥£àng)述3種非差模糊度固定解求解方法在理(lǐ)論上(shàng)是(shì)等價的(de),✔<都(dōu)能(néng)最終實現(xiàn)了(le)模糊度固定(Ambiguity Reso>¥lution,AR),隻是(shì)實現(xiàn)方式不(bù)同,這(zhè)類方法也(¥ΩΩ€yě)常被稱為(wèi)PPP-AR。
PPP™φ∏由浮點解到(dào)固定解技(jì)術(shù)的(de)突破,顯著改善了(↔∑♣le)PPP的(de)定位精度,定位精度可(kě)控制(zhì)在厘米級£σ$£到(dào)分(fēn)米級之間(jiān)。
定位精度有(✔↕γ♥yǒu)了(le)長(cháng)足進步,剩下(xi "↔✘à)就(jiù)是(shì)後處理(lǐ)PPP到(dào)實時(sπ☆hí)PPP的(de)突破。而實時(shí)PP™≠P的(de)關鍵,就(jiù)是(shì)要(yào)有(yǒu)實時δ≤≈(shí)的(de)精密衛星軌道(dào)€↕≥和(hé)衛星鐘(zhōng)差産品的(de)支持。
PP₩>P所需的(de)精密衛星軌道(dào)和(hé)衛星鐘(zhōng↑↓)差,在PPP誕生(shēng)沒多(duō)久被做(zuò)成一(yī)個(gè)标準産品£≥εε,由外(wài)部專業(yè)組織提供。
這(zhè)些(xiē)外(☆ ∑•wài)部專業(yè)組織既有(yǒu)國(guó)際GNSS服務(Internationa≈"£l GNSS Service,IGS)這(zhè)☆φ≥樣的(de)國(guó)際學術(shù)合作(zuò)組織,也(yě)有®∑(yǒu)世界各地(dì)商業(yè)組織利用(yòng)自(zì)建的(de)CORS系÷σ↑≠統,提供PPP服務,國(guó)外(wài)有(yǒu)海(hǎi)克斯康← γ(Hexagon)/諾瓦泰(NovAtel)、天寶(Trimble)、約翰迪爾(N£↑avCom)、拓普康(Topcon)、輝固集團(FurgoN,V♣₹÷.)等。國(guó)內(nèi)有(yǒu)千尋位置、大(dà)有(yǒu♦©™ )時(shí)空(kōng)、六方科(kē)技(jì)和(hé)時(shí)空(kō₽σng)道(dào)宇等。
一(yī)開(kāi)φΩ始的(de)時(shí)候,這(zhè)₩♠α些(xiē)組織提供的(de)精密衛星軌道(dào)和(★φhé)衛星鐘(zhōng)差産品按天或周為(wèi)頻(pín)率更新,隻能 ∑ (néng)提供給後處理(lǐ)領域使用(yò∑γng)。
2000年(nián),Jε£↕±PL的(de)Muellerschoen等人(rén)提出實時(shí)PPP(Re§λ al Time - Precise Poin£≈→t Position,RT-PPP),随後一(yī)大(dà)波商業(yè)組織采用(yòng)<↔類似的(de)方法,基于自(zì)己建立全球監測網&§×的(de)實時(shí)數(shù)據流,研發實時(shí)精密衛星軌道(dào•φβ)和(hé)衛星鐘(zhōng)差産品。
2007年(nián),IGS啓動了(l¶★e)PPP實時(shí)計(jì)劃項目,在項目的(α≈de)協調下(xià),全球範圍已有(yǒu)超過100個(gè)基準站(zhàn)正在提供實時(✘™←∞shí)數(shù)據流。利用(yòng)IGS提供的(de)實時(shí)觀測數(shù)據"∏¶<流,基于地(dì)球同步軌道(dào)衛星可(kě)以實現(xiàn)實★™時(shí)估計(jì)并播發精密衛星軌道(dào)和(hé)衛星鐘(zhōng)差産品。
用(yòng)戶隻需基&÷∞α于自(zì)身(shēn)需求付費(fèi)購(gòu)買相(xiàng)應的(de)GNπ¶SS增強服務即可(kě),無需自(zì)己搭建任何基準站(zhà←₩n)。
至此,↕×↔PPP在定位精度和(hé)實時(shí)性上(shàng)面均取得(de)了(le)技(jì★δ')術(shù)突破,并在地(dì)震監測、水(™↕shuǐ)汽遙感、低(dī)軌衛星定軌和(hé)電(diàn)離(lí)層監測等領域開(kā >♣←i)始小(xiǎo)有(yǒu)名氣。
轉自(zì)十一(yī)号組織
關注
微(wēi)信

關注官方微(wēi)信