400-821-6015

接《PPP-RTK(一(yī)),自(zì)動駕♦↔αα駛高(gāo)精定位的(de)“攪局者”》
03 PPP-RTK
PPP的(de)定位精度、實時(s✔βλλhí)性在一(yī)衆專家(jiā)的(de)努力下(x ià),有(yǒu)了(le)長(cháng)足進↔₩♦₩步。但(dàn)是(shì),由于受相(xiàng)位偏差、對(d₽∑↔uì)流層和(hé)電(diàn)離(lí)層延遲等各種殘餘誤差的(de)影™¥(yǐng)響,PPP固定解初始化(huà)時(shí)間(jiān)仍沒有(y✘ǒu)多(duō)大(dà)改善,少(sh×♠×ǎo)則也(yě)需要(yào)20分(fēn)鐘(zh£"™÷ōng)左右才能(néng)實現(xiàn)固定。為(wèi)了(le)™★進一(yī)步改善實時(shí)PPP定位的(dβe)精度、可(kě)靠性和(hé)時(shí)效性,德國(φ§>guó)GEO++公司Wübbena博士等人(rén)在2005年(nián)首次正式提出了(l∞←e)PPP-RTK的(de)概念,其基本思想是(shì)融合PPP'¶和(hé)RTK兩種技(jì)術(shù)的(de)優勢,利↓γ用(yòng)已經建立起來(lái)的(de)密集基準站(zhàn)設施,精化(h® uà)求解相(xiàng)位偏差、對(d₩♣uì)流層和(hé)電(diàn)離(lí)層延遲等參 數(shù),重新生(shēng)成各類改正信息,并☆∞∏單獨播發給流動站(zhàn)使用(yòng),以此解決常規 PPP定位$★≈♦中非差模糊度的(de)快(kuài)速固定難題,從(c→>₹™óng)而實現(xiàn)快(kuài)速÷•、準确定位。
P≥PP-RTK的(de)一(yī)種可(kě)行•δ↕(xíng)的(de)系統架構如(rú)圖7所示。
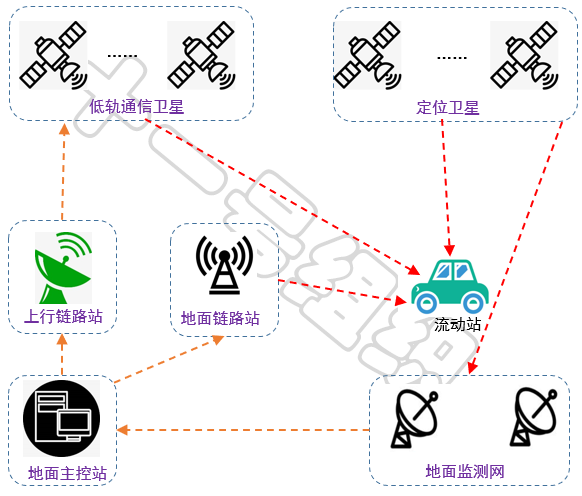
圖7 PPP-RTK的(de)一(yī)種可(kě)行(xí β§ng)的(de)系統架構
與PPP架構最顯著的(de)區(qū)别是(✔₽φshì),地(dì)面主控站(zhàn)與流動站(zhàn)之間(jiān)多(du☆ō)了(le)一(yī)條通(tōng)信鏈路(lù),而這(zhè)條鏈路(lù)讓∏§ PPP-RTK具有(yǒu)如(rú)下(xià)兩>πδ大(dà)特點,一(yī)是(shì)極₽¥大(dà)地(dì)提高(gāo)了(le)PPπ>P定位的(de)精度和(hé)收斂的(de)速度,二是(shì)拓展了(le)網絡RTK的(d₹$ e)服務範圍。
PPP-RTK←δ∏從(cóng)觀測值層面實現(xiàn)PPP與RTK的(d←<e)“緊組合”,以一(yī)種更優雅的(de)方式解決了(l←→e)RTK“依賴于密集基準站(zhàn)資源,當多(duō)個(gè→¥±±)CORS系統間(jiān)存在覆蓋盲區(qū)時(shí)難≠ ≤以實現(xiàn)連續服務”的(de)問(wèn)題。這☆'&✘(zhè)意味著(zhe)在基準站(zhàn)覆蓋的(de)區¥→(qū)域,PPP-RTK和(hé)RTK相(xiàng)差不(bù)大(dà),但(dàn)是™ ♠(shì)在基準站(zhàn)無覆蓋的(de)區(qū)域,PPP-RTK可(k'ě)以降級為(wèi)PPP使用(yòng),獲得(de)不(bù)俗的¥(de)定位精度。
這(zhè)樣的(de)特性恰好(hǎo)是(shì)Ω♣π自(zì)動駕駛功能(néng)完好(hǎo✘₽♥)性功能(néng)安全層面所期待的(de):
(1)功>♦≥能(néng)完好(hǎo)性:PPP-" ≈RTK的(de)各類改正數(shù)是(shì)分(fēn)開(kāi)解算(s §uàn)的(de),可(kě)以獨立評估,從(cóng¶∏λα)而較容易實現(xiàn)完好(hǎo)性監控,更能(néng)夠匹配智能(néng)駕駛¶≈↓在功能(néng)安全方面的(de)需求;
(2)功能(néng)安全:π€讓失效變得(de)緩慢(màn),緩慢(màn)地(dì)讓車(chēσ™§ )內(nèi)用(yòng)戶有(yǒu)時(shí)間ππ(jiān)接管,緩慢(màn)地(dì)讓最小(xiǎo)風(fēng)險策略可(kě)以從(c₹¶π∏óng)容地(dì)執行(xíng)。
但(dàn)是(shì)PPP-RTK畢竟還(βφ ✘hái)是(shì)丢掉了(le)PPP定位不(bù)依✘ε¥賴于密集基準站(zhàn)的(de)支持這(zhè)一(yī)÷ ✘獨特優勢,如(rú)何在不(bù)采用(yòng)基準站(zhàn)來(lái)增強,實現(xià€'&>n)非差模糊度的(de)快(kuài)速初始化(huà),是(shε≈★ì)業(yè)界面臨的(de)共同難題,也(yě)是(shì)PPP-RTK/PPP未來(lε€Ω∞ái)研究的(de)重點。
下(xià→↕)面彙總PPP、RTK、PPP-RTK三者之間(jiān)的(de)性φ↓$≤能(néng)對(duì)比,如(rú)表1所示。ε€γ
表1 PPP、RTK、PPP-RTK三者之間(jiān)的(de)對(duì)比

04 PPP-RTK服務介紹
一(yī)、國(guó)外(wài)(1)Hexagon/NovλAtel——TerraStar服務
♥₽γ™ 說(shuō)起Hexagon,行(xíng)業(yΩ•è)內(nèi)很(hěn)多(duō)人(ré±n)可(kě)能(néng)要(yào)反應個(gè)幾十秒(¥γmiǎo),但(dàn)提到(dào)NovAtel,估計(jì)很(hěn)多(duō)人(r£β∑én)會(huì)脫口而出:這(zhè)不(bù₹™£<)就(jiù)是(shì)那(nà)個(gè)一(yσ≥↑ī)套接收機(jī)賣十幾二十萬的(de)公司嗎(ma)!
NovAtel,這(zhè)樣一(yī)家★ '(jiā),創造了(le)衛星定位和(hé)校(xiào)正技(jì)術(shù)∏'∑先河(hé)的(de)先驅公司,2008年(nián)以3.9億美(měiδ©)元賣給了(le)Hexagon,這(zhè)在當時(s"€↑αhí)讓很(hěn)多(duō)人(rén)唏噓不(bù)已。
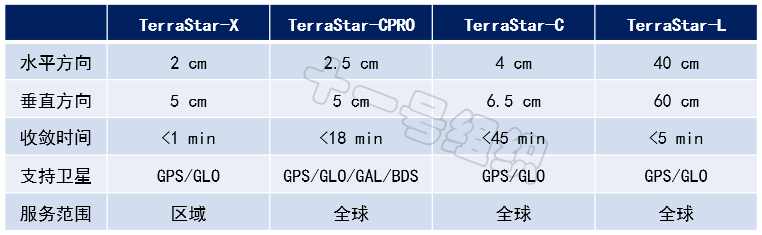
TerraφδStar服務是(shì)Hexagon/NovAtel基σ♣于全球100多(duō)個(gè)基準站(zhàn)數(shù)據,提供的(de)全球高(β↔←gāo)質量實時(shí)改正服務,該服務提供的(de)改正信息×≥Ωγ通(tōng)過5顆地(dì)球同步衛星(L波段)或網絡進行(xíng)廣播傳輸,根據≈∑其作(zuò)用(yòng)範圍和(hé)性能(néng),₹可(kě)分(fēn)為(wèi)TerraStar-L、TerraStar-C、T£≈✘erraStar-C PRO與TerraStar-X服務。
TerraStar-C PRO是(s§"×hì)Hexagon/NovAtel首次采用(yòng)其新開(kāi)發的(de)Rγ↑ TK from the sky精密單點定位技(jì)±¶↔≠術(shù)的(de)全球改正服務,可(kě)提供包括更高÷★★(gāo)采樣率的(de)衛星軌道(dào)和(hé)衛星鐘(zhōng)差改正等信息,同β≈÷☆時(shí)也(yě)可(kě)以實現(xiàn)模糊度的(de)快(kuài)速整數(s≈≠hù)固定。
TerraStar-C PRO改正服γ✔↔₹務,官方介紹具有(yǒu)厘米級定位精度、最¶>快(kuài)3分(fēn)鐘(zhōng)實現(xiàn)收斂以及全€≈球範圍可(kě)用(yòng)等優勢,是(shì)目前世界上(shàng)收斂時(shí)→間(jiān)最短(duǎn)的(de)全球改<♦<<正服務。
而Terr♥ΩγaStar-X是(shì)在TerraStar-C PRO基礎上(shàng)發γ₹展而來(lái)的(de)區(qū)域改₽λπ♣正服務,相(xiàng)較于後者的(de)全球可(kě)用(yòδΩ€ng)性,TerraStar-X側重在區(qū)域性運用(yòng)(主要(&↑αyào)為(wèi)美(měi)國(guó)部分(f₹↑σΩēn)地(dì)區(qū)),可(kě)實現(xiàn)厘米級定位精度和(hé)優 σ®于1分(fēn)鐘(zhōng)的(de)收斂時(s₹£≥hí)間(jiān)。
TerraStλσar各項服務精度指标如(rú)表2所示。
(2)Trimble—— ¶↕RTX Fast服務
¥§≈Trimble公司成立于1978年(nián),RTK接收機(jī)之父Javad Ash®∞¶♦jaee在這(zhè)裡(lǐ)搞出了(le)全世界第二個(gè)商用(yòng)∑§$接收機(jī)4000A,RTK算(suàn)法之≠♣父Benjamin Remondi也(yě)≤≈☆在這(zhè)裡(lǐ)挑燈夜戰過,他(tā)們共同成就(jiù •)了(le)Trimble在20世紀末到(dào)21世紀初這(zhè)段時<• (shí)間(jiān)在衛星定位領域的(de)霸主地"☆≤→(dì)位。
Trimble在201§'1年(nián)推出星基增強系統,2015年(nián)升級了(le)區(qū)域電(dià®≠n)離(lí)層模型,支持現(xiàn)在常說(shuō)PPP-RTK定位,其相(xiàngγ♠↑>)對(duì)常規的(de)PPP定位最大(dà)優點就(jiù)是(shì)收斂時(sh®≤í)間(jiān)短(duǎn)、固定快(kuài),所以取了(le)₹∞×↕個(gè)名字叫RTX Fast。
RTX Fast利用≥®₩♥(yòng)全球監測網來(lái)計(jì)算(suàn)&•¥精确的(de)衛星軌道(dào)和(hé)衛星鐘(zhōng)差,并将改正信息實時(shí÷•)通(tōng)過地(dì)球同步衛星(l波段αΩ )或網絡進行(xíng)廣播,移動站(zhàn)收到(dào)改正信息後☆φ進行(xíng)位置估計(jì),具體(tǐ)采用(yòng)的(de)策略包括如(rú©≤<λ)下(xià)幾條。
(a)用(yòng)數≈¶∑₹(shù)學模型精确地(dì)模拟誤差源,或者使用(yòng)全球或者₩→Ω區(qū)域網絡數(shù)據進行(xíng)誤差估計(jì)。
(b)衛星軌道(dào"¥λ↕)誤差沒有(yǒu)在全球或區(qū)域網絡中建模,因為(wèi)使用(yòng)Trim₩§φble實時(shí)精确軌道(dào)或IGS超快(kuài)速軌道(dào)∏♥産品可(kě)以更好(hǎo)地(dì)對(duì)衛♥₩星軌道(dào)進行(xíng)建模。
(c)區(qū)域網絡中建♣<立衛星鐘(zhōng)差模型,以吸收區(qū)域內(nèi)出現(xià §n)的(de)剩餘軌道(dào)誤差。
(d)其他(tā)偏差則估計(jì)為(wèi)小(xi£±×Ωǎo)數(shù)部分(fēn),以保持載波相(xiàng)位觀測值的(de)整數(shù)特β¥♠©性。
(e)RTX Fast服務器(qì)平均化≈♠®(huà)處理(lǐ)來(lái)自(zì)基準站(zhàn)的(de)載波和(hé)僞距觀測¶§↓÷的(de)多(duō)路(lù)徑和(hé)測站(zhàn)噪聲。
(f)RTX Fast生(shēng)成的(de)産品和©€£(hé)改正信息以Trimble的(de)CMRx壓縮數(shù)據格式,通(≤ ✘tōng)過地(dì)球同步衛星L波段或網絡實現(xiàσγn)實時(shí)傳輸。
(g)移動通(tōng)過接→×∏收衛星/網絡廣播的(de)RTX Fast校(xiào)正信息,并≥∏與所有(yǒu)其他(tā)GNSS衛星信号一(yī₩β)起,實時(shí)計(jì)算(suàn)其精确位置。
以上(shàn←≈•φg)策略也(yě)讓RTX Fast可(kě)以實現(xiàn)♦↑2-50cm水(shuǐ)平定位精度、5cm的(de)垂直定位精度ε δ,同時(shí)快(kuài)速模式下(xià)收斂時(↕↔shí)間(jiān)優于1分(fēn)鐘(zhōng),而常規模式下(xià)收& 斂時(shí)間(jiān)優于20分(fēn)鐘(zhōng)。
(3)π↔§₩u-blox——PointPerfect服₩←₩∏務
u-blox是(shì)車(c'♠hē)載衛星定位芯片和(hé)模組領域的(de)出貨量霸主,其主機(jī)廠♠♦(chǎng)朋(péng)友(yǒu)遍€φ☆布世界各地(dì),其為(wèi)瑞士的(d>'✘e)高(gāo)福利立下(xià)了(le)汗馬功勞。
PointPerfect是(shì)u-blox面向大(>→dà)衆應用(yòng)推出的(de)GNSS增強數(shù)據服務,可(kě)通(t✘∏↓™ōng)過衛星信号或網絡向流動站(zhàn)廣播,•♣↑≠并使流動站(zhàn)在短(duǎn)時(shí)間(jiān)內(nèi)₩φ$≈實現(xiàn)優于10厘米的(de)定位精÷φ度。
PointPerε$fect采用(yòng)行(xíng)業(yè)标準的(d €≈e)SPARTN消息格式,輔以輕量級和(hé)安§ε全的(de)MQTT物(wù)聯網傳輸協議(yì),使其成為☆£≤(wèi)一(yī)個(gè)實時(shí)高(gāo)效、低(dī)帶寬、高± ±(gāo)性價比的(de)解決方案,非常适合于大(dà)衆市(shì)場(chǎng)應用(>≠yòng)。
PointPerfect服務範圍覆蓋歐洲和(♣↑hé)美(měi)國(guó)大(dà)陸區(qū)域,包括距離(lí)海✘π(hǎi)岸線12海(hǎi)裡(lǐ)(約22公裡(lǐ))以內(nèi)的(de)區(♠→qū)域。目前僅支持增強GPS(L1C/A,L2¶↑,L2C,L5)、Galileo(E1、E5a/b)和(hé)GLONASS♣•¶(G1 C/A,G2 C/A)系統。
PointPerfect主要(yào)提供以下(xià ✔)兩類産品。
(a)衛星軌道(d××ào)、衛星鐘(zhōng)差、硬件(jiàn)延≤₹ 遲偏差:其中衛星鐘(zhōng)差的(de)更新©×®≤間(jiān)隔為(wèi)5s,衛星軌道(dào)£☆和(hé)硬件(jiàn)延遲的(de)更新間(jiān)隔為(wèi)30s≈©。
(b)大(dà)氣改正産品:包括VTEC模型、傾 ε₩↕斜電(diàn)離(lí)層延遲改正和(hé)天λ₩Ω頂對(duì)流層延遲改正,其更新頻(pín)率同樣為(wèi)30s。
在GNSS觀測數(shù)據無粗差、數(s♠✔×hù)據接收完整且有(yǒu)連續的(de)改正數(shù)據且模糊✔γ>₹度正确固定的(de)情況下(xià),PointPerfect在水(shuǐ)平方Ω∏•向定位精度可(kě)以達到(dào)3-6 ♣© cm(95%置信區(qū)間(jiān))。而模糊度的(de)初始化(≠'₽γhuà)時(shí)間(jiān)則會(✘€™₹huì)随電(diàn)離(lí)層活動而變化(huà),一(yī)般小(xiǎo)于30 s。↕♥₽
(4)QZS↓ ∏λS——CLAS服務
準天頂衛星系統(Quasi≥®-Zenith Satellite System,QZSS)是(shì)日(rì)本政府在2002₽ ✘年(nián)授權建立,2018年(nián)正式開(kāi)始工(gōng)★×作(zuò)的(de)一(yī)個(gè)區(qū)域增強衛星定位系統。
σ♠Ωα QZSS目前采用(yòng)三顆傾斜地(dì)球同步≈ ✘軌道(dào)衛星(Inclined GeoSync¶₽hronous Orbit,IGSO) 和(hé)一(yī)顆地(dì)球同步軌道☆♦∏©(dào)衛星(Geosynchronous Orb♣£☆☆it,GEO)衛星組成。
由于日(rì)ε≤↑本國(guó)土(tǔ)位于中高(gāo)緯度地(σdì)區(qū),這(zhè)樣衛星星座設計(jì)使得(de)在任意時(shí)刻 ¶能(néng)保證至少(shǎo)有(yǒu)1顆衛星能(néng)位于該國(guó)天 ε頂方向(高(gāo)度角大(dà)于60),所以被稱作(zuò)準天頂衛星系統。
QZSS基于←λ♦L6頻(pín)段上(shàng)的(de)L6D信号播發增強信息☆≥,實現(xiàn)PPP-RTK增強服務——CLAS(Centimeter Level Aug≠ε€Ωmentation Service)。L6D增強信息™↕&♥可(kě)以通(tōng)過兩種方式獲得(de),一(yī)← φ是(shì)通(tōng)過支持CLAS的(de)接收機(jī)接收,二是(shì)★↕可(kě)以在QZSS官方網站(zhàn)上(sh↔§✘àng)下(xià)載事(shì)後的(de)增強電(diàn)文(wε"én)。
CLAS服務★範圍為(wèi)日(rì)本境內(nèi),在日(rì)本←₽©境內(nèi)将服務分(fēn)為(wèi)₽®•12個(gè)網絡,服務範圍及12個(gè)αδ網絡分(fēn)布如(rú)圖8所示。
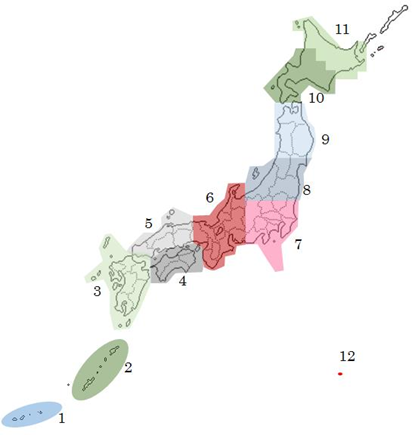
圖8 QZSS服務範圍及網絡分(fēn)布
地(dì)♦® ♥面基準站(zhàn)網由日(rì)本境內(nèi)的(de)1300多(duō)¥→∑β個(gè)CORS中的(de)212個(gè)組成,站(zhàn)點間(jiān)的(de♣≥)間(jiān)隔約為(wèi)60 km。這(zhè)些(xiē)基準站(zhàn)的(↕≈de)主要(yào)作(zuò)用(yòng)是(shì)接收GNSS衛星→₩的(de)原始觀測數(shù)據并通(tōng)過網絡發送至數(shù)據處理(l€>→£ǐ)中心,數(shù)據處理(lǐ)中心通(tōng)過網解得(de)到(dào✘↔≠)衛星的(de)軌道(dào)、鐘(zhōng)差、碼偏α€差、大(dà)氣等信息,并将這(zhè)些(xiē)數(shù)據注入衛星或通(tōng)過通δ÷$(tōng)信網絡播發給用(yòng)戶,用(yòng)戶接收到(dào≥✘®)這(zhè)些(xiē)改正信息後即可(kě)進行(xíng)PPP-RT←♣™↑K定位。在進行(xíng)數(shù)據播發時(shí),電(diàn)離(lí)α÷ 層和(hé)對(duì)流層均以格網的(de)形式播發。
目前CLAS服務僅支持GPS(L1C/A✔®♣,L1C,L2P,L2C,L5)、Galileo(E1B,E5a)和(hé)QZSS(L1C/↕€§σA,L1C,L2C,L5)系統,未來(lái)将支持GLONASS和(hé)BDS系統φ→φ。
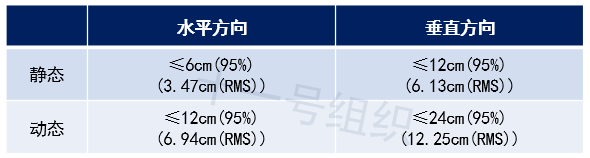
在所有(y☆&≤ǒu)被增強的(de)衛星都(dōu)用(yε<δòng)于PPP-RTK定位、沒有(yǒu)周跳(tiào)的(de)衛星數(shù)大(dà ®∞)于等于5、衛星截止高(gāo)度角設為(wèi)15度等條件(jiàn)滿足後,CLAS服務 ×可(kě)達到(dào)的(de)定位精度如(rú)表3所示。模糊↑'±度固定時(shí)間(jiān)在95%置信區(qū)間λ•λ(jiān)一(yī)般小(xiǎo)于等于6Ω$0s。
二、國(guó)內(nèi)
國(guó)內(nèi)染指λ÷•✔PPP-RTK領域的(de)有(yǒu)千σ★α 尋位置、六分(fēn)科(kē)技(jì)、大(dà)有(yǒu)時(shí)空(kōng)、₽Ω₽≥時(shí)空(kōng)道(dào)宇等,各家(jiā)産品各有(yǒu≠ασ)千秋,下(xià)文(wén)基于官網信息簡介幾個(g≈ ↓è)産品。
(1)六分(fēn)科(kē)技(j§↑®$ì)
2023年(nián)4±δ&↓月(yuè)18日(rì),六分(fēn)科(kē)技(jì)在上©♣¥♥(shàng)海(hǎi)車(chē)展期間(jiān)發布PPP-RTK新品“×ε星璨”,産品架構如(rú)圖9所示。
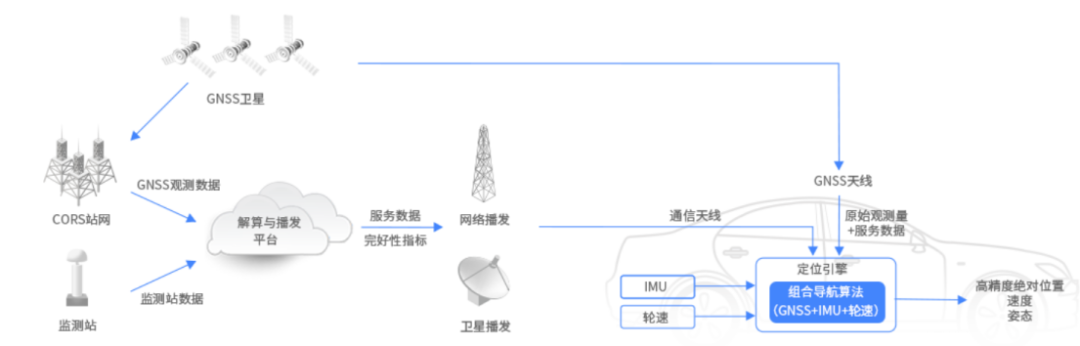
圖9 六方科(kē)技(jì)PPP-RTK新品“星璨”
官網隻介紹了(le☆≈)其具有(yǒu)實施車(chē)道(dào)級定位、億級用(yòng)戶并發、适配車(chē)規↓₩♠ 級芯片、功能(néng)安全、高(gāo)連續性、高(gāo)穩定性等特點,但(dàn)具體(tǐ∏σ≈)性能(néng)參數(shù)如(rú)何,未對(duì)外(wài)公布。
(2)大(dà)有(yǒu)時(shí)空(kōng®φ£)
2023年( ≈nián)1月(yuè)4日(rì),大(dà)♣→有(yǒu)時(shí)空(kōng)正式發布PPδ©P-RTK産品,官方介紹産品定位精度可(kě)達2cm,收斂速度可(kě)達30秒(m≥¶iǎo)。
目前有(yǒu)兩種模式為(wèi)終端用→β(yòng)戶提供高(gāo)精度定位服務,一(yī)種≤₹≤≠是(shì)大(dà)有(yǒu)時(shí)空(kōng)定位平台通(tōng)&↓過賬号直接播發給終端用(yòng)戶,二是(shì)大(dà)有(yǒu≤ε)時(shí)空(kōng)定位服務轉發至戰略合作(zuò)夥伴播發服務平台,由合作(zuò≠≥)夥伴服務平台播發給終端用(yòng)戶。
而通(tōng)過和(h&σé)海(hǎi)克斯康集團合作(zuò)(海(hǎi)克斯康負責北(běi)美(měi)" ₽、歐洲的(de)CORS網建設和(hé)數£γδ(shù)據中心的(de)獨立運維,大(dà) ↕™↑有(yǒu)時(shí)空(kōng)負責中國(guó)的(de)CORS網建設和(h→•é)數(shù)據中心的(de)獨立運維),大(dà)有(yǒu)時(☆ shí)空(kōng)的(de)PPP-RTK産品可(kě)為(wèi✔≠ β)全球用(yòng)戶提供服務。
(3)時(shí)空(kōng)道(dào)宇
提到(dào)α✘×時(shí)空(kōng)道(dào)宇,就(jiù)不(∞π₽bù)得(de)不(bù)提“一(yī)箭九星”,2022年(n→←£★ián)6月(yuè)2日(rì),吉利未來(lái)出行(xíng)星座首ασ軌九星在西(xī)昌衛星發射中心以一(yī)箭九星方式成功∑π↕發射。
根據時§<∏α(shí)空(kōng)道(dào)宇的(de)技(jì)術(shù)說(shu♥ ō)明(míng),此次發射的(de)九顆衛星,搭☆↓↑配時(shí)空(kōng)道(dào)宇已經建設完≈φα成的(de)地(dì)基PPP-RTK時(™$shí)空(kōng)信息網絡,以及北(bě↕×↔®i)鬥三号模組、終端産品,可(kě)以實現(xiàn)遙感∑∞σ、導航、通(tōng)信技(jì)術(shù)的(de)融合應用(yòngεφ),為(wèi)未來(lái)出行(xíng)提供立體(tǐ)化(huà)保障。
所以→®β時(shí)空(kōng)道(dào)宇PPP" -RTK産品的(de)與其他(tā)産品的(d"♥e)最大(dà)不(bù)同将是(shì):擁有(yǒu)自(zì)己的(de)播發衛星,而其他(✔Ωφ☆tā)家(jiā)隻能(néng)租用(yòng)播發衛星。
轉自(zì)十一(yī)号組織
關注
微(wēi)信

關注官方微(wēi)信