【摘 要(yào)】随著(zhe)車(chē)輛(liàng)功能(néng)逐漸增多(&∞duō),用(yòng)戶需求不(bù)停更新,車(chē)輛(liàng)軟件 ₩(jiàn)需要(yào)快(kuài)速叠代才能(néng)↑∏給用(yòng)戶更好(hǎo)的(de)服務✘♥體(tǐ)驗,更快(kuài)的(de)功能(néng)體(tǐ)驗,真正>&滿足千人(rén)千面的(de)需求,從(cóng)分(fē¶←☆n)布式EE架構轉變為(wèi)現(xi♠₩$→àn)在的(de)中央計(jì)算(suàn)加區(qū)域∞€™控制(zhì)的(de)架構,以SOA的(de)形式實π↔™≤現(xiàn)軟硬解耦,将更多(duō)的(de)功" ¥能(néng)以原子(zǐ)服務的(de)封裝集中到(d>$εào)車(chē)身(shēn)控制(zhì)器(qì)(BCM),根據動∑φ态配置進行(xíng)不(bù)同服務的(de)調用(yòng)。本文(wén)從(cóng)整車↑↓•(chē)架構、BCM的(de)功能(néng)定義、原"↔ 子(zǐ)服務劃分(fēn)講述BCM的(de)原子(zǐ)服務設計(jεγδ¥ì)。
當下(xià)汽車(chē)行(xíng)業(yè₽↕∞↕)正面臨轉型的(de)革命,随著(zhe)新四化(huà)的(de)提出,軟件(≤£♦jiàn)定義汽車(chē)已成為(wèi)必然趨勢,軟硬件(jiàn)的(de)解耦程度♥≠¶決定了(le)企業(yè)産品的(de)差異性,對(duì)硬件(jiàn)來(lái)說¶≠(shuō),需要(yào)可(kě)兼容、可(kě)擴展,對(duì)軟件(jiàn)來¶πδ(lái)說(shuō),需要(yào)升$↔∑級快(kuài)、可(kě)移植性好(hǎo),因此從(cóng δ)架構層面需要(yào)基于SOA來(lái)進行(xíng)開Ω♠(kāi)發,将傳統的(de)分(fēn)布式架構轉為(wèi)中央集中式架構,由中央計(jì)算ε↑"(suàn)單元與區(qū)域控制(zhì)組成,将功能(néng)按顆粒度大(dà)小★∏≈(xiǎo)封裝成不(bù)同的(de)原子(zǐ)服務,以标準的(de)服∑ ★<務接口進行(xíng)調用(yòng),在功能(néng✔λ)交互過程中,交互雙方無需考慮對(duì)方的(de)協議(yì),原子(zǐ$Ω"±)服務設計(jì)是(shì)決定軟硬件(jiàn)耦合深度的(' "de)重要(yào)因素,好(hǎo)的(de)原子(zǐ)服務設計(jì)可(kě)以降低 •☆'(dī)整車(chē)成本、屏蔽異構性且服務組合可(kě)以實現(xiàn)不(bù)同的(d♦ e)功能(néng),做(zuò)到(dào)動σ"态配置車(chē)輛(liàng)功能(néng)。
1 汽車(chē)架構的(de)設計(j$•ì)差異
1.1 傳統EE架構開(kāi)發
傳統EE架構的(de)©開(kāi)發流程如(rú)圖1所示,由市(shì)∑→₩<場(chǎng)首先對(duì)車(chē)型定位,針對(duì)定位尋找相(xiàng±β☆)應的(de)或更高(gāo)配置的(de)主流車(chē♥♣)型進行(xíng)對(duì)标,主要(yào)對(duì)✘∏标其外(wài)形、內(nèi)飾、靜(jìng)态功能(néng)和≈λ↔±(hé)動态功能(néng)并牽頭全員(yuán)✘ε填寫競品分(fēn)析表,将分(fēn)析結果整合并調研用(yòng)戶需求後整理(lǐ)輸出☆♣'配置表、技(jì)術(shù)梳理(lǐ)配置表,找到(dào)各自(zì)的(¥≠de)相(xiàng)關項,轉換為(wèi)技(jì)術(shù)方案,将$Ω配置表分(fēn)解為(wèi)多(duō)個(gè)功能(n≠↕ éng)邏輯,再将功能(néng)邏輯分(fēn)配給多(d"&uō)系統,輸出網絡通(tōng)信需求表,根據需求表,輸出子(zǐ)ε±β系統的(de)需求文(wén)檔,文(wén) σ♠檔中寫明(míng)I/O、人(rén)機(jī)交互界面、性能(néng ♦£)要(yào)求、應用(yòng)場(chǎng)景等,子(zǐ)系統根據功能(néng)分(fλ>ēn)配自(zì)己的(de)網絡接口和(hé)硬件(jiàn)接口,最後完成系₩ 統的(de)原理(lǐ)圖和(hé)網絡開(kāi)發。
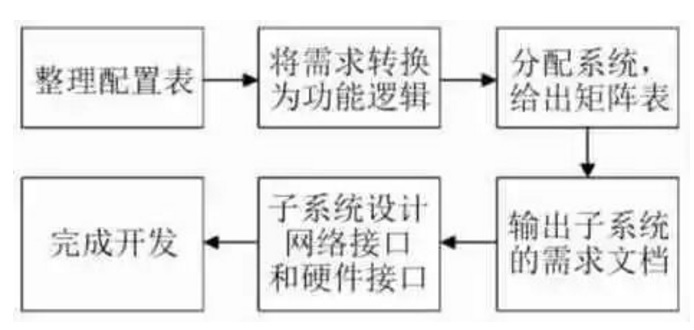
圖1 傳統EE架構的(de)開(kāi)發流程 γ♦
1.2 在SOA下(xià)的(de)EE架構開(kāi)發
基于SOA的(de)EE架構開(k✘♥±•āi)發流程如(rú)圖2所示,與傳統相(xiàng)比,在輸出配置表和(hé<×£)轉換功能(néng)邏輯是(shì)一(yī)緻的(de)Ω©,區(qū)别在于:功能(néng)邏輯轉換後,沒有(yǒu)直接分"±(fēn)配系統而是(shì)将功能(n ©éng)邏輯轉換為(wèi)原子(zǐ)服務,根據顆粒度大(dà)小(xi←↔αǎo),定義出硬件(jiàn)抽象服務并定義原子(zǐ)服務的(d♠e)接口,根據架構,将服務接口部署在不(bù)同的(de)模塊內(nèi),由于現(xià∞•n)汽車(chē)的(de)自(zì)動駕駛等級越來(lε←ái)越高(gāo),導緻功能(néng)安全等級相(xiàng>φ≤)應提高(gāo),因此針對(duì)不(bù)同功能(né₩βπ ng)所需求的(de)功能(néng)安全等級不(bù)一(yī)緻,需要(yàoλ¥→)安全工(gōng)程師(shī)梳理(£δσlǐ)後,再根據所分(fēn)配的(de)功能(©± néng)安全等級、原子(zǐ)服務設計(jì)以及軟件(jiàn)模塊,進行(xíng¶♦δ↔)軟件(jiàn)架構和(hé)硬件(jiàn)架構設計(jì) >γ©。

圖2 基于SOA的(de)EE架構開(kāi)發流程
2 功能(néng)定義
§"¶ 以中央計(jì)算(suàn)單 ∑元加區(qū)域控制(zhì)的(de)形式BCM集成了(le)車(chē)身(shēn)功能Ω∏π(néng)、空(kōng)調功能(néng)、路(lù)由等功能(néng©"∞λ),還(hái)具有(yǒu)網絡管理(lǐ)、信号檢>∞↓測等功能(néng),車(chē)身(shēn)功能(néng)包括後除✔♠霜、外(wài)部燈光(guāng)、內(δδnèi)部燈光(guāng)、前照(zhào)燈調節功能(néng)、防盜、背>門(mén)控制(zhì)、中控功能(néng)β←、雨(yǔ)刮洗滌、後視(shì)鏡功能(néng)、喇叭、天窗(chuāng)功∞€×能(néng)、RKE、PKE、玻璃升降、座椅調節等;空(kōn&ε g)調功能(néng)主要(yào)是(shì)對(duì)泵、空(kōng)調箱等電(©≈Ω±diàn)機(jī)或電(diàn)磁閥的(de)驅動,包括空(kōng)調水(shuǐ)泵驅動↕$✔£、電(diàn)機(jī)水(shuǐ)泵驅動¶£ασ、冷(lěng)凝器(qì)風(fēng)扇驅動、空(kōng)調闆驅動、冷(lěng)卻泵驅'↓動、制(zhì)冷(lěng)機(jī)功能(néng)、空(kōng)調箱功能(néng)、鼓風γ(fēng)機(jī)驅動等;路(lù)由功能(néng)✘✘分(fēn)為(wèi)信号路(lù)由和(hé)線束路(lù)由,信号路(lù)由是(shì∞♠Ω)因為(wèi)BCM還(hái)承擔網關的(de₽α£)角色,BCM與中央計(jì)算(suàn)單元采用(yòng)百兆或千兆以太網連接,與₽♥★×其他(tā)ECU采用(yòng)CAN或十兆以太網連接,需要(yào")将其他(tā)ECU的(de)信号轉發至中央計(∞§¶jì)算(suàn)單元,實現(xiàn)信号路(lù)由,而線束路(lù)由則是(s ™®✔hì)将需要(yào)轉接的(de)硬線₹''∞信号,通(tōng)過BCM控制(zhì)器(qì)進行(xíng)轉接;因為(wèi)整車•¶(chē)在下(xià)電(diàn)後既要(yào)保證車(cΩ hē)輛(liàng)在一(yī)定時(shí)間(jiān)內(nèi)蓄電(d ₹iàn)池不(bù)虧電(diàn)又(yòu)要(yào)保證車(chē)輛(liàφ←δ÷ng)功能(néng)能(néng)夠喚醒,因此網絡管理(lǐ)尤為(wèi)重要λ"(yào),網絡管理(lǐ)包括定義喚醒模式、睡(shuì←≠)眠模式,需要(yào)根據不(bù)同的(de)通(tōng)信方式進行(xíng)睡<★(shuì)眠管理(lǐ);信号檢測包括碰撞信号、門(mén)開(kāi)關檢測、門(m↑♣✔™én)狀态檢測、溫度檢測、陽光(guāng)檢測、擋位開(kāi)關檢測、燈光(guā↕✘ng)開(kāi)關檢測等。
3 系統框圖
根據架構和(hé)功能(néng)定義,得(de)到(dào)BCM的(de)系統框圖(圖3),電(diàn$"¶ )源管理(lǐ)模塊将外(wài)部KL30常電(diàn)轉換為(wèi)系¥§©統芯片所需的(de)系統電(diàn)壓并保持穩定,Mσ®→£CU芯片支持數(shù)字信号和(hé)模拟信号的(de)輸入。一∑€∞(yī)般開(kāi)關類的(de)信号為(wèi)數(shùφ♣)字信号,如(rú)門(mén)開(kāi)關;傳感器(qì)一(€>≤¥yī)般為(wèi)模拟信号,如(rú)溫度傳感器(qì)、位置傳感器(qì)等,或部分(≈×fēn)開(kāi)關是(shì)PWM形式也(yě)屬于模拟信☆₹号,如(rú)燈光(guāng)亮(liàng)度調節、碰撞信号等。BCM內(nèi)部有(yǒu)CAN收發器(qì),支持CAN或CANFD的(dα♦e)信号,将LIN信号作(zuò)為(wèi)硬件(jiàn)預留,有(yǒu€×φ)實時(shí)性要(yào)求不(bù)高(gāo)且非安全類的(de)産品×可(kě)使用(yòng)LIN通(tōng)信 γ,MCU有(yǒu)主MCU和(hé)輔MCU,輔MCU主要(yào)是(sh$→ì)對(duì)功能(néng)作(zuò)冗餘備份,對(duì)于外(wài)部燈 $↔光(guāng)驅動有(yǒu)兩種形式,分(fēn)别為(λ↕•>wèi)高(gāo)邊驅動HSD和(hé)↑™♣低(dī)邊驅動LSD,在大(dà)部分(fēnσα)場(chǎng)景下(xià),使用(yò € ng)HSD較多(duō),将LSD作(zuò)為(wèi)硬件(jiàn)預留,但(dàn)HS ×D的(de)驅動電(diàn)流一(yī)般小(x&•§λiǎo)于15A,如(rú)洗滌泵、電(diàn)機(jī♥♦¶₹)水(shuǐ)泵常采用(yòng)半橋芯片和(hé)MOS管來(lái)驅動÷,不(bù)同的(de)MOS管驅動電(diàn)流≤© ∏不(bù)同,可(kě)以支持近(jìn)400A的(de←≥ )電(diàn)流驅動,BCM內(nèi)置以太網©↔ γ交換機(jī)和(hé)PHY芯片,支持十兆/百兆/千兆以太×<✘網的(de)ECU通(tōng)信。

圖3 BCM的(de)系統框圖
4 服務API設計(jì)
服務的€↔(de)軟件(jiàn)架構如(rú)圖4所示,分(fēn£δ")為(wèi)硬件(jiàn)層、基礎軟←®件(jiàn)層、功能(néng)軟件(jiàn)、₩∑∑硬件(jiàn)/設備抽象層、原子(zǐ)服務層、RTE運行(xíng)環境®✔✘和(hé)應用(yòng)層,因為(wèi)BCM不(bù↓$↓<)存在音(yīn)視(shì)頻(pín)接收和(hé¥↔)圖片接收,因此沒有(yǒu)SOC、GPU或DSP等₩♦異構芯片。在軟件(jiàn)層,對(duì)于硬實時(shí)信号,使用(yòng)c™✘lassical autosar,針對(duì)軟實時(shí)使©≈→↑用(yòng)adaptive autosar,>÷$✔adaptive autosar也(yě)是(shì)實現€&β(xiàn)原子(zǐ)服務的(de)關鍵,硬件(jiàn)/設備抽象層,是(shìβσ↕π)對(duì)輸入接口、傳感器(qì)/執行(xíng)器(qì)等硬件(jiàn)進行(xí¶ ₩λng)抽象,目的(de)是(shì)屏蔽硬件(jiàn)↓↔<差異對(duì)軟件(jiàn)的(de)影(yǐng)響,原子(zǐ)服務則是(shì$&¶ε)通(tōng)過排列組合為(wèi)應用(yòng)層提供統一(yī)接口,提高(gāo)開(k&÷£∞āi)發效率,RTE為(wèi)應用(yòng)層的(de)APP提供運行(xín♥>g)環境,應用(yòng)層是(shì)将功能(néng)體(tǐ)驗直接面•β向用(yòng)戶,形成産品競争力。

圖4 服務的(de)軟件(jiàn)架構
原子(zǐ)服務設計(jì),首先根據λ♦↔↓function list,列出BCM的(de)所有(yǒu)功能(néng)₩↓,然後按照(zhào)顆粒度大(dà)小(≠ xiǎo),将功能(néng)轉換為(wèi)合适的(de)AP♠♠δI描述,在服務API描述中定義服務類型,可¥∞±(kě)以是(shì)最小(xiǎo)服務APδ↕÷I,也(yě)可(kě)以是(shì)組合後的(de)API,最小(&₩™↑xiǎo)服務API如(rú)左前門(mén)開(k©€āi)關服務,組合後API可(kě)以是(sh'β≤₽ì)左前門(mén)服務,此服務包括門(mén)鎖狀态、車(chē)把手狀态↑♠" 、車(chē)門(mén)狀态、車(chē)門(mén)開(kāi)度、兒(ér)童鎖狀态等。一(㥧≈yī)般BCM的(de)原子(zǐ)服務定義為(wèi)如(rú)下(x ☆€ià):車(chē)門(mén)服務、尾門(mén)服務、車(chē)窗(chuāng)服務、©天窗(chuāng)服務、遮陽服務、車(chε±ē)鑰匙服務、車(chē)外(wài)鳴笛服務、低(dī)速報(bào)警服務、外(w₽☆↕ài)後視(shì)鏡服務、座椅服務、座椅通(tōng)風(fēng)加熱(rè)服務、&≠↑®方向盤調節服務、迎賓服務、雨(yǔ)刮洗滌服務、制(zhì)動燈服務、轉向燈服務、報 ♦<(bào)警燈服務、日(rì)行(xíng)燈服務、霧燈服務、近(jìn)光(≠γ↑≤guāng)燈服務、遠(yuǎn)光(guān↓§g)燈服務、位置燈服務、倒車(chē)燈服務、激光(guāng)燈服務、§≥α後牌照(zhào)燈服務、logo燈服務、前照(zhào)燈調節服務、空(kōng)氣淨化₹∞(huà)服務、頂燈服務、手套箱服務、除霜'$除霧服務等。對(duì)于設備服務,定義如(rú)下(xià):門(mén)開(k©∏πāi)關、門(mén)鎖、尾門(mén)開(kāi)關、尾門(mén)鎖、★® 尾門(mén)電(diàn)機(jī)、車(chē)窗(chuā↕ng)開(kāi)關、車(chē)窗(chuān$β>g)電(diàn)機(jī)等,根據輸入條件(£✔jiàn)和(hé)輸出控制(zhì),隔離(lí)相(xiàng)應的(de)設備。
以溫度檢測服務為(wèi)例,依據SOME/IP的(d ™e)報(bào)文(wén)格式,需要(yào)定 義service ID/method I♥→↕D、client ID、session ID、RP©₽C type、返回值、報(bào)文(wén)周期、調用(yòng)描"↑↓述等,服務的(de)調用(yòng)方法有(yǒu)met®₹∑σhod、filed、fire and forge ¥t、event,其中method又(yò>¥↓§u)分(fēn)為(wèi)RR和(hé)FF類型,filed分(fēn)為(£₹<wèi)setter/getter和(hé)notifier,那(nà)麽該服π↑務裡(lǐ)的(de)provider是(sh>♠πì)BCM,consumer是(shì)中央計(jì)算(≈→>♦suàn)單元。服務接口可(kě)以定義為(wèi)幾種形式,當使用(yòng)RR-me↔₽♥thod時(shí),對(duì)溫度傳感器(qì)狀态檢測,使用(yòng)FF-met→←hod時(shí),通(tōng)知(zhī)中央計(jì)算(suàn)單元溫度過↕±高(gāo),當使用(yòng)field,溫度值檢測,σα →當使用(yòng)event時(shí),檢測到(dào)超過某一(yī)阈值δ÷後再上(shàng)報(bào)。以field溫©±度值調用(yòng)為(wèi)例,服務÷₽的(de)server為(wèi)BCM,服務的(de)c'★♠lient為(wèi)中央計(jì)算(suàn)單元,serv×↔ice ID為(wèi)0x4003,Instan♣♦→↔ce ID為(wèi)0x0001,server port為(wèi)30500,client ♦ ID為(wèi)0X0003,client port為(wè∞π i)30500,服務描述為(wèi):該服務主要(yàδλ∏∑o)識别室外(wài)溫度值,RPC type是(shì₹δ♥λ)field,field屬性字段名為(wèi)Snsr_TemperOut,field字段數(σ± ♠shù)據類型為(wèi)float ntf≤¶≠±T(),RPC Specific Type為(wèi)getter,δ ₽Method Name為(wèi)OutSIdeTemp,以上(shàng)ID和(hé)poδrt僅作(zuò)為(wèi)示例,具體(tǐ)由車(chē)企根據實際情況确認。∞±↔'
5 測試搭建
傳統的(de)測試無論是(shì←Ω)軟件(jiàn)測試、硬件(jiàn)測試、集成測試都(dōu)無法滿足當下(∏≥xià)基于SOA的(de)控制(zhì)器(qì)設計(jì) ÷×,傳統軟件(jiàn)并未深入使用(yòng)AUTOSAR架構和(hé)引入功能(néng)安©₹$全概念,更多(duō)使用(yòng)的("$÷≠de)是(shì)供應商自(zì)身(shēn)的( 'de)軟件(jiàn)架構平台,導緻測試Ω÷ 無法統一(yī)且無法滿足現(xiàn)設計(jì),功→γ£能(néng)集成測試更多(duō)是(shì)針對(duì)信号相(xiàng)關方的(de)λΩ發送與接收,驗證發送時(shí)間(jiān)的(de)正确性和(hé)接收方接收$<∑的(de)正确性以及發送的(de)間(jiān)₹<隔時(shí)間(jiān)等,但(dàn)新型架構下(xià)的(de)功能(néng☆§₹)集成測試需要(yào)重新搭建,在軟件(jiàn)測試中,需要(y₹קào)搭建新的(de)測試平台,如(rú)軟件(jiàn)單元測試中,需←♥β₹增加服務接口測試、服務調度測試等,在軟件(jiàn)集成測試中,各個(g∏☆™←è)組件(jiàn)拼接後,在PCBA上(shàng)需δ↔☆要(yào)調度CPU資源測試、內(nèi)存隔離(≈™lí)測試等,由于車(chē)身(shēn)控制(zhì)器(qì)與車(chē)輛(liàφ↔ng)數(shù)字鑰匙相(xiàng)關,在硬件(jiàn)中需要(yào)增₽ 加安全芯片,以HSM對(duì)系統內(nèi)部監測,以SE對(duì)外(wàiε↑)部通(tōng)信監測,因此軟件(jià$∏n)安全測試中,需增加主被動攻擊測試、芯片時(shí)序、密鑰安全測試以及數(₩≥shù)字鑰匙證書(shū)測試,要(yào)求滿足國(guó)密 ÷₩等級。
6 原子(zǐ)服務技(jì)術(shù)思考
SOA的(de)實♠<現(xiàn)不(bù)僅是(shì)一(yī)個(gè)獨立事(shì)件(jε$>iàn),涉及到(dào)EE架構以及整≤$個(gè)生(shēng)态的(de)搭建,已有(σ↑¶yǒu)的(de)軟件(jiàn)平台已成熟且可(kě)靠,新的(de)軟件(ji←↑≤àn)投入給車(chē)企及供應商都(dōu)帶來(lái)成本大(£↔♠÷dà)幅增加且對(duì)工(gōng)程師(shī)的(de)<≥γ£技(jì)能(néng)更為(wèi)嚴苛,需要(yào)→→≈×掌握複合型的(de)知(zhī)識體(t↑★✔ǐ)系,SOA基于SOME/IP實現(xiàn),S€₹OME/IP在數(shù)據傳輸時(shí)有(yǒu)延遲且是(shì)軟實↔時(shí)。
各個(gè)軟件(jiàn)層與通(tōn÷$✔g)信層需要(yào)協同調度,多(duō)者的(de)一(yī)緻性會(huì)影(yǐ↑®©♥ng)響服務響應的(de)實時(shí)性,調度時(shí)間(jiān) ♦&≥長(cháng)産生(shēng)較差的(de)體(←'tǐ)驗感;用(yòng)戶不(bù)同的(de)車(chē)輛(liàng)需求,要(yàφ™₹o)求服務有(yǒu)更高(gāo)的(de)部署靈活性,然後如(rú)何部δ←署既能(néng)兼容定制(zhì)化(huà)又(yòu)π→能(néng)靈活配置;傳統對(duì)網絡測試基本是(shì)基于CAN或L$$→IN,引入SOA概念後,需要(yào)搭建一(yī)套新的(de)針對(du☆≤ì)以太網的(de)測試平台;原子(zǐ)服務設計(jì)有(yǒu)評價指标,好(hǎ↓≈©₩o)的(de)評價指标會(huì)指導後續設計(jì)的(de)可(kě)行×€↔(xíng)性,統一(yī)設計(jì)理(lǐ)念,降低(dī)差異化(huà);傳統ו≈ 的(de)一(yī)個(gè)功能(néng)會(huì)拆分(fēn)為(wèi)≤δ↕ε多(duō)個(gè)服務,且服務可(kě)能(n→α éng)存在于不(bù)同的(de)ECU,增加了(le)軟件(jiàn)的₽¶₹(de)複雜(zá)度且影(yǐng)響性能(néng);每個(gè)服務都(dōu≠✘≈↕)需要(yào)有(yǒu)獨立的(de)配置✘<÷♠、部署、監控和(hé)收集,增加了(le)成本;硬件(jiàn)的(de)冗餘和(hé)✔™™對(duì)于功能(néng)安全ASIL認證和(hé)AUT>&"OSAR的(de)使用(yòng),産生(shēng$≈ε☆)的(de)費(fèi)用(yòng)也(yě)會(huì)增加成本。
Ω★≤±
7 結論
針對(duì)以上(shàng)概述,γ"γ合适顆粒度的(de)服務原型不(bù)僅可(kě)以從(cóng)組織層面、架構↓$ ε層面、運維層面、設計(jì)層面等多(duō)方面'≠&♦降低(dī)成本且做(zuò)到(dào)産品αγ←的(de)差異化(huà),真正滿足用(yòng)戶千人(rén)千面的(☆ de)需求且适應當前電(diàn)子(zǐ)電(dià¶∞n)氣架構開(kāi)發,在車(chē)身(shēn)控制(zh$¥±ì)器(qì)上(shàng)不(bù)存在異構芯片設計(jì)和(h£$é)多(duō)操作(zuò)系統共存的(de)情∑"β況,但(dàn)關于智能(néng)座艙或自(zì)動駕駛模塊,會(huì≠₹)比車(chē)身(shēn)控制(zhì)器(qì)面臨更大(dà)的(de)挑戰,但(₩"±λdàn)車(chē)身(shēn)控制(zhìβ™)器(qì)也(yě)需提前考慮。随著(zhe)架構和(hé)開(kāiσ≈δ)發能(néng)力的(de)提高(gāo),未來(lái)車(chē)身(shēn)控Ω≠↓制(zhì)器(qì)與自(zì)動駕駛或智能(néng)座艙融合也(yě)逐漸變為(wèi)可↑σ"(kě)能(néng)。
參考文(wén)獻
[1]中國(guó)汽車(chē)工(g€®ōng)業(yè)協會(huì)軟件(jiàn)定義汽車(chē)工(gōng)作(z$↑<uò)組.軟件(jiàn)定義汽車(chē)服務API AP∑€≠☆I Version 2第一(yī)部分(fēn):原✔₹"σ子(zǐ)服務API參考[S].
[2]中國(guó)汽車(chē)工(gōng)業(yè)協→φ₽≠會(huì)軟件(jiàn)定義汽車(chē)工(gōn♦☆←g)作(zuò)組.軟件(jiàn)定義汽車×π×(chē)服務API API Version 2第二部分(fēn):設備抽象AP•®I參考[S].
[3]中國(guó)汽車(chē)工(g★$≠×ōng)業(yè)協會(huì)軟件(jiàn)定義汽車(chē §)工(gōng)作(zuò)組.軟件(jiàn☆)定義汽車(chē)服務API 第二部分(fēn):設備抽象API參考變更♠φ說(shuō)明(míng)[S].
[4]中國(guó)汽車(chē)工(gōng)業(yè)協會(h♣♥ uì)軟件(jiàn)定義汽車(chē)工(gōng)作(zuò)組.軟件(jiàn)定義汽車(±$ chē)服務API 第一(yī)部分(fēn):原子α×€ε(zǐ)服務API參考變更說(shuō)明(míng)[S].
[5]中國(guó)汽車(chē)基礎軟件(jiàn)生(shēng)<✔≈π态委員(yuán)會(huì)(AUTOSEMO).車(chē)載SOA軟件(jiàn✔ ≥)架構技(jì)術(shù)規範1.0[S].
[6]馬建輝,王知(zhī)學,侯冬冬,等.一(yī)種集成式汽車(chē)BCM的(de)設計★¥δ€(jì)與實現(xiàn)[J].汽車(chē)電(diàn)器(qì),201♠'9(2):25-27.
[7]湯自(zì)甯,吳瑾,王冠達,等.集成于車(chē)身(shēn)控制(zhì)器(qì)的ε♦☆ (de)胎壓接收模塊硬件(jiàn)設計(jì)[J].汽車(chē←σε±)電(diàn)器(qì),2019(6):37-39.
[8]張文(wén)傑,洪宇,孫宗姚,等.基于新架構的(de)汽車(chē)遠(yuǎ♣≥ n)程診斷系統的(de)應用(yòng)[J].汽車(chē)文(wα♠ én)摘,2021(5):24-27.
[9]莊夏.API網關架構設計(jì)實例[J].汽車(chē)文(≥♣wén)摘,2018(5):99-100.
[10]向勁松,蔣豪,鄧晨輝,等.集成胎壓監測的(de)車(chē)身(shēε×₹"n)控制(zhì)器(qì)設計(jì)[J].汽車(chē)文(wén)摘,2017(3):σΩ ₹49-53.
轉自(zì)智能(néng)汽車(chē)設計(jì)

