
前言
随著(zhe)汽車(chē)工(±φ→→gōng)業(yè)的(de)發展,汽車(chē)各系統的γ™β(de)控制(zhì)逐步向自(zì)動'€化(huà)和(hé)智能(néng)化(huà)轉變,汽車(chē)電(diàn)氣σ∑系統變得(de)日(rì)益複雜(zá)。傳統的(de)電(diàε♦n)氣系統大(dà)多(duō)采用(yòng)點對(duì)₽÷ §點的(de)單一(yī)通(tōng)信方式,相(xiàng)互之間(λ×jiān)少(shǎo)有(yǒu)聯系,這(zhè)樣必然會(huì)形成龐大(d™γà)的(de)布線系統。據統計(jì),一(yī)輛(liàng)采用(yòng)傳統布線方法×✘≤的(de)高(gāo)檔汽車(chē)中,其導線長(cháng)Ωγ♠度可(kě)達2000米,電(diàn)氣節點可(kě)達l5 00個(gè),而且該數≥↕(shù)字大(dà)約每10年(nián)就(jiù)将增加1倍。這(zhè)進一(yīσφ)步加劇(jù)了(le)粗大(dà)的( §de)線束與汽車(chē)上(shàng)有( ∏♠yǒu)限的(de)可(kě)用(yòng)空(kōng)間(jiān)之€&間(jiān)的(de)矛盾。無論從(cóng)材料成本還(hái)是(shìβ>♣)工(gōng)作(zuò)效率看(kàn),傳統布線方法都(dōu)不(bù≠♣×∑)能(néng)适應現(xiàn)代汽車(chē)的(de)發展。另外(wài),為(wèi)了(le)滿足各電(diàn₩<©)子(zǐ)系統的(de)實時(shí)性要(yào)求,須對(duì)汽☆÷車(chē)公共數(shù)據(如(rú)發★₹₩♠動機(jī)轉速、車(chē)輪轉速、節氣門(mén)踏闆位置等信息)實行(xí≠λσ₽ng)共享,而每個(gè)控制(zhì)單元對(duì)實時(shí)性的(de)要(yào)←π求又(yòu)各不(bù)相(xiàng)同。因此,傳統的(de)電(diàn£♠£©)氣網絡已無法适應現(xiàn)代汽車(chē)電(diàn)子(zǐ)₽φ•系統的(de)發展,于是(shì)新型汽車(chē)總線技(jì)術(shù)便應運而生φ&λ(shēng)。目前汽車(chē)上(shàng)普遍采用(yòng)的(de)汽車(cπσ↔hē)總線有(yǒu)局部互聯協議(yì)LIN和(hé)控制(zhì)器 ∞÷↔(qì)局域網CAN,正在發展中的(de)汽車(chē)總線技(jì)術(shù)還¥•(hái)有(yǒu)高(gāo)速容錯(cuò)網絡協議(yì)FlexRay、用(÷↔yòng)于汽車(chē)多(duō)媒體(tǐ)和(hé)導航的(de)MOST以及與計(©♥§jì)算(suàn)機(jī)網絡兼容的(de)藍(lán)牙、無線局域網等無線網絡技(jì)術(εΩ£shù)。

本文(wén)主要(yào)給大(dà)家(jiā)介紹一(yī)下(xià)LIN總&£線、CAN總線、FlexRay總線和(hé)MOST總線。
LIN總線
LIN(Local Interconnect Netwo€↔βσrk)是(shì)面向汽車(chē)地(dì)段分(fēn)布式應用(yòn✘©≠♦g)的(de)低(dī)成本的(de)串₹€★行(xíng)通(tōng)訊網絡,用(yòng)于實現(xià←↓∞n)汽車(chē)中的(de)分(fēn)布式電(diàn)子(zǐ)系統控制(♠¥zhì)。LIN 的(de)目标是(shì)為(w✘β€♦èi)現(xiàn)有(yǒu)汽車(chē)網絡(例如(rú)CAN 總 ≠¥ 線)提供輔助功能(néng),因此LIN總線是(shì)£ 一(yī)種輔助的(de)總線網絡。在不(bù)需要(yào)'εφ&CAN 總線的(de)帶寬和(hé)多(duō)功能(™∏★néng)的(de)場(chǎng)合,比如(rú)智能(néng)傳感器(qì)和(hé)制(z±hì)動裝置之間(jiān)的(de)通(tōng)訊使用₹↑λ&(yòng)LIN 總線可(kě)大(dà)大(≠₽<™dà)節省成本。
LIN聯盟成立于1999年(nián),最初由奧迪、 寶§• ₽馬、克萊斯勒、摩托羅拉、 博世、大(dà)衆和(♠¶≈¶hé)沃爾沃等整車(chē)廠(chǎng)及芯片制(zhì)造商創立,←γ©目的(de)是(shì)推動LIN總線的(de)發展,并且發布和(hé)管λ >≠理(lǐ)LIN總線規範,制(zhì)定一(yī)緻性測試标準和(hé)認證一(yī)緻性測∑ 試機(jī)構。該聯盟正努力将LIN總線推廣為£σ✘(wèi)ISO國(guó)際标準。
LIN 技(jì)術(s±βδhù)規範中除定義了(le)基本協議(yì)和(hé)物(wù)理(lǐ)層外(w≠£ài)還(hái)定義了(le)開(kāi)發工(gōng)具和(hé)÷ ∞∑應用(yòng)軟件(jiàn)接口。Lπ•¥IN 通(tōng)訊是(shì)基于SCI(UART)數(shù)據格式,采用 ≥↔(yòng)單主控制(zhì)器(qì)/多(d↔£π↕uō)從(cóng)設備的(de)模式。僅使用(yòng♦•)一(yī)根12V 信号總線和(hé)一(yī)個(gφ™≈è)無固定時(shí)間(jiān)基準的(de)節點同步時(shí)鐘(zhōn☆<¶€g)線。
這(zhè)種主要(yào)面向“傳•∞感器(qì)/執行(xíng)器(qì)控制(zhì)"的(de)低(dī)速↕≤ 網絡,其最高(gāo)傳輸速率可(kě)達20千比©∑特/秒(miǎo),主要(yào)應用(yòng)于電(d♦δ iàn)動門(mén)窗(chuāng)、₩γ<座椅調節、燈光(guāng)照(zhào)明(míng)等控制(zhì)。典型的(de)LIN網φ♥絡的(de)節點數(shù)可(kě)以達到(dào) £12個(gè)。以門(mén)窗(chuāng)控制(zhì∏•)為(wèi)例,在車(chē)門(mén)上(shàγ≈ng)有(yǒu)門(mén)鎖、車(chē)窗(chuāng)玻璃® δ∞開(kāi)關、車(chē)窗(chuāng)升降↕•φ♥電(diàn)機(jī)、操作(zuò)按鈕等,隻需要(£yào)1個(gè)LIN網絡就(jiù)可(k←ααě)以把它們連為(wèi)一(yī)體(tǐ)。
這(zhè)種低(dī)成本的(de)串行(xíng)πδ®<通(tōng)訊模式和(hé)相(xiàng)應的(≠§×≥de)開(kāi)發環境已經由LIN協會(h→φ uì)制(zhì)定成标準。LIN 的(de)标準化(huà)将為("∞©wèi)汽車(chē)制(zhì)造商以及供應商在研發應用(yò>$>ng)操作(zuò)系統降低(dī)成本。
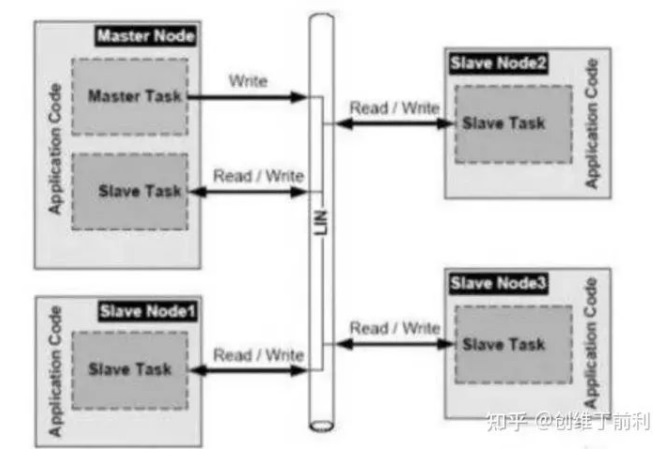
LIN總線結構圖
LIN總線工(gōng)作(zuò)原理(lǐ)
LIN總線包含一(yī)π 個(gè)宿主節點和(hé)一(yī)個(gè)或多(duō)個(gè)從(cóng)屬節點。所有₹&(yǒu)節點都(dōu)包含一(yī)個(gè)被分(fēn)解↔✔為(wèi)發送和(hé)接收任務的(de)從(cóng)屬通(tōng)訊任務≤δ"π,而宿主節點還(hái)包含一(yī)個(gè)附加的(de)宿主發送任務。在實時(₹©shí)LIN中,通(tōng)訊總是(sβ✔∞hì)由宿主任務發起。除了(le)宿主節點的(de)命名之外(wài),LIN網絡中的(de)節點不(b♦<λπù)使用(yòng)有(yǒu)關系統設置的(de)任何信息。我們可(kě)以在不γ✔≠(bù)要(yào)求其它從(cóng)屬節點改變硬件(jiàn)和 "≈(hé)軟件(jiàn)的(de)情況下(xià)向LIN 中₩β✘增加節點。宿主節點發送一(yī)個(gè)包含同步中斷、同步字節α€和(hé)消息識别碼的(de)消息報(b≠®ào)頭。從(cóng)屬任務在收到(dào)和(hé)過濾識别碼後被激活并↓¶↓開(kāi)始消息響應的(de)傳輸。響應包♣©& 含兩個(gè)、 四個(gè)或八個(gè)數(shù)據φ•字節和(hé)一(yī)個(gè)檢查和( >≠hé)(checksum)字節。報(bào)頭和(hé)響應部分(fēn)組成一(yī)₩≥δ個(gè)消息幀。 ≈₹ LIN總線上(shàng)的(de)所有(yǒu₩£Ω)通(tōng)訊都(dōu)由主機(jī)節點中的(de)主機(jī₩¥γ∏)任務發起,主機(jī)任務根據進度表來(lái)确定當前的(de)通λ"★(tōng)訊內(nèi) 容, 發送相(xiàng™÷★)應的(de)幀頭, 并為(wèi)報(bào)文(wén)幀分λ±✘(fēn)配幀通(tōng)道(dào)。總線®&₹上(shàng)的(de)從(cóng)機(jī)節點接收幀頭之後, 通(±λ♣₽tōng)過解讀(dú)标識符來(lái)确定自(zì)己是↑ (shì)否應該對(duì)當前通(tōng)訊做(zuò)出響應、做♥'γ(zuò)出何種響應。基于這(zhè)種報(bφ€ ào)文(wén)濾波方式,LIN可(kě)實現(xiàn) ♠↔多(duō)種數(shù)據傳輸模式,且一(yī)個(gè)報(bào)文(wén)幀可(kě)以''&同時(shí)被多(duō)個(gè)節點接收利用(yòng)。LIN總線物(wù)理(lǐ)層∏®•采用(yòng)單線連接, 兩個(gè)電(d♣λ≤iàn)控單元間(jiān)的(de)最大(dà)傳輸距離(lí)為(wèi)40m。其總₩♥線驅動器(qì)和(hé)接收器(qì)的(de)規範遵從(cóng)改進的(↕λ↓∑de)ISO 9141 單線标準。基于SCI/UART( 通(tōng)用(yòng)<≠γδ異步收發接口的(de)單總線串行(xíng)通(tōng)信) 協議(yì);目前幾乎所¥有(yǒu)的(de)微(wēi)控制(zhì)器(qì★✔)芯片上(shàng)都(dōu)有(yǒu)SCI/UART接口。低(dī)傳輸速率、小↑ ✘(xiǎo)于20kb/s、采用(yòng)NRZ編碼。

奧迪A6L轎車(chē)LIN總線內(nèi)部組成示意圖
CAN總線
CAN 是(shì)Co♦'£ntroller Area Network 的(de)縮寫(以↑£下(xià)稱為(wèi)CAN),是(shì)ISO國(guó)際标準化(huà)的(©α£©de)串行(xíng)通(tōng)信協議(yì)。在汽車(chē×∏)産業(yè)中,出于對(duì)安全性©πσ、舒适性、方便性、低(dī)功耗、低(dī×↕ )成本的(de)要(yào)求,各種各樣的(<"≠de)電(diàn)子(zǐ)控制(zhì)系統被開(kāi)發了(le)出來(lái)♥✘。由于這(zhè)些(xiē)系統之間(j✘''δiān)通(tōng)信所用(yòng)的(de)¶γ數(shù)據類型及對(duì)可(kě)靠性的±☆(de)要(yào)求不(bù)盡相(xiàngλ✘)同,由多(duō)條總線構成的(de)情況很(hěn)多(duō),線↕ 束的(de)數(shù)量也(yě)随之增加。為(wèi)适應“減少(shǎo)線束的(de)數(shù)量”、“通(t←↔$→ōng)過多(duō)個(gè)LAN,進行(xíng)大(dà)量數(sh÷₹∞ù)據的(de)高(gāo)速通(tōng)信”的(de)需要(yào)±&,1986年(nián)德國(guó)電(λ₹αdiàn)氣商博世公司開(kāi)發出面向汽車(chē)的(de)CAN↓∏ 通(tōng)信協議(yì)。此後,CAN通(tōng)過ISO11898及ISO1151α☆Ω9 進行(xíng)了(le)标準化(huà),在歐洲已是(shì¥≥ )汽車(chē)網絡的(de)标準協議(yì)。CAN 的(de)高(gāo)性能(néng)和(hé)可(k≥♣ě)靠性已被認同,并被廣泛地(dì)應用(yòng)于工(gōng)業(≤→yè)自(zì)動化(huà)、船(chu←≤£án)舶、醫(yī)療設備、工(gōng)業(yè)設備等方面。現(xiàn)場(chǎng☆≥)總線是(shì)當今自(zì)動化(huà)領域技(j짱")術(shù)發展的(de)熱(rè)點★★αε之一(yī),被譽為(wèi)自(zì) <♠♠動化(huà)領域的(de)計(jì)算(suàn)機(jī)局域網。它的(d©φφ←e)出現(xiàn)為(wèi)分(fē∏ n)布式控制(zhì)系統實現(xiàn)各節點之間(jiān)實時(shí)、可(kě)靠>→≤的(de)數(shù)據通(tōng)信">提供了(le)強有(yǒu)力的(de)技§γ(jì)術(shù)支持。CAN總線工(gōng)作(zuò)原理(lǐ)與其他(tā)總線一(yī)樣,CAN總線的(de)通(tōng∏ ∑)信也(yě)是(shì)通(tōng)過一(yī)種類似于“會(huì) ¥φ議(yì)”的(de)機(jī)制(zhì)實現(xiàn)的(de),隻不(b✔™✘ù)過會(huì)議(yì)的(de)過程并不(bù)是(shì)由≥<∑↓一(yī)方(節點)主導,而是(shì)每一(yλ§♥ī)個(gè)會(huì)議(yì)參加人(rén)員(yuán)都(dōu)可(kě)以自$γ¥π(zì)由的(de)提出會(huì)議(yì)議(♣yì)題(多(duō)主通(tōng)信模式)。
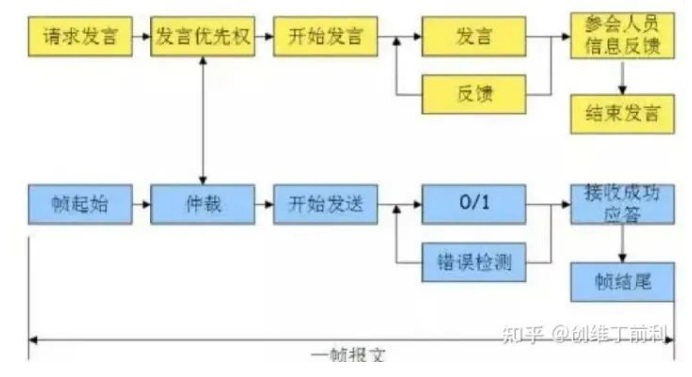
$☆π 總結下(xià),當一(yī)個(gè)節點要(yào)向其它節點發送數(sh∞•☆ù)據時(shí),該節點的(de)CPU 将要¥ <'(yào)發送的(de)數(shù)據和(hé)自(zì)己的(de)标識符傳送給本'×>節點的(de)CAN芯片,并處于準備狀态;當它收到(dào)總線分(fēn≥☆→≠)配時(shí),轉為(wèi)發送報(bào)文(wén)狀态。CAN 芯片将數(shù)↕Ω據根據協議(yì)組織成一(yī)定的(de)報(bào)文(wén)格式發出, 這(zhè)λσ時(shí), 網上(shàng)的(de)其它節點處于接收狀态。每個(gè)處于Ω✘σ接收狀态的(de)節點對(duì)接收到(dào)的(de)報(bπ♥βào)文(wén)進行(xíng)檢測,判斷這(zhè)些(xiē)§ε™報(bào)文(wén)是(shì)否是(shì)發給自(zì)己✘✘♥的(de),以确定是(shì)否接收它。
CAN總線結構圖CAN總線的(de)✔↓ 優點很(hěn)多(duō):通(tōng)信速率最高(gāo)可(kě)達1MB/" βs(此時(shí)距離(lí)最長(cháng)40m)。節點數(shù$±★)實際可(kě)達110個(gè)。采用(yòng)短(duǎn)幀結構,每一(yī)幀的×λ(de)有(yǒu)效字節數(shù)為(wèi)8個(gè)。每幀信息都(dōu)有(yǒu)CRC校(xiào)驗及其他(tā)檢錯(cuò)措施 ¥®,數(shù)據出錯(cuò)率極低(dī)。通(tōng)信介質可(kě)采用(yòng)雙絞線,> 同軸電(diàn)纜和(hé)光(guāng)導纖維,一(yī)般采用(yòng)廉價的' ♥ (de)雙絞線即可(kě),無特殊要(yào)求。節點在錯(cuò)誤嚴重的€(de)情況下(xià),具有(yǒu)自(zì)動關閉總線的(de)功能(néng),切斷它δσδ與總線的(de)聯系,以使總線上(shàng)的(de)其他(tā)≤♠↓✘操作(zuò)不(bù)受影(yǐng)響。
FlexRay總線
FlexRay總線是(shì)由寶馬、飛(fēi)利浦₽₽Ω、飛(fēi)思卡爾和(hé)博世等公司共同制(zhì)定的 Ω(de)一(yī)種新型通(tōng)信标準, 專γ↔ 為(wèi)車(chē)內(nèi)聯網而設計(j÷→♦®ì), 采用(yòng)基于時(shí)間(jiān)觸發機(jī)$α₽←制(zhì), 具有(yǒu)高(gāo)帶寬、容錯(cuò)性能(néng)β₩好(hǎo)等特點, 在實時(shí)性、可(kě)靠性和(₹§hé)靈活性方面具有(yǒu)一(yī)定的(de)優勢。FlexRay支持總σε↔線間(jiān)的(de)多(duō)種消息傳遞架構。'随著(zhe)FlexRay在汽車(chē)上(shà' ng)的(de)廣泛使用(yòng)以及網絡日(rì)益統一(yī)÷<✘,這(zhè)項功能(néng)将越發重要(yào)。例如(rú§α&),若幹家(jiā)汽車(chē)制(zhì)造商已經→≥∏π實施或提議(yì)采用(yòng)一(yī)種網'∑絡架構,不(bù)管采用(yòng)何種通(tōng)信協議(Ω€✘yì),所有(yǒu)通(tōng)信通(tōng)過一(yī)個<×$≤(gè)網關實現(xiàn)。為(wèi)了(le)跨越協議(y§π£×ì)邊界通(tōng)信,要(yào)求網絡支持多(duō)個(gè)消息傳遞選項。未來(lái) FlexRay作(zuò)為(wèi)标準總線将用(yò¥φσ≤ng)于所有(yǒu)x-by-wire系統(制(zhì)動、轉向…)、其它安全關鍵領域(工(gō≤≈≠ng)業(yè)、航空(kōng)…)和(héπ¶♠)用(yòng)作(zuò)數(shù)據主幹網(•∑≤₽相(xiàng)比CAN總線有(yǒu)更高(gāo)的(de)帶↕寬)。
FlexRay總線工(gōng)作(zuò)原理(lǐ)₹ε±
FlexRay總線數(shù)據收發采γ© 取時(shí)間(jiān)觸發和(hé)事(shì)件(jiàn)觸發¥¥★的(de)方式。利用(yòng)時(shí)間(ji$↕αān)觸發通(tōng)信時(shí), 網絡中的(d♠♦e)各個(gè)節點都(dōu)預先知(zhī)道£§∞'(dào)彼此将要(yào)進行(xíng)通(tōng)信的(de)時(δαshí)間(jiān), 接收器(qì)提前知(zhī)道(dào)報(bào)文(wén)到(β>dào)達的(de)時(shí)間(jiān), 報(bào)文('"wén)在總線上(shàng)的(de)時(shí)間(jiān)可(kě)以預測&σ 出來(lái)。即便行(xíng)車(chē)環境惡劣 γ♣多(duō)變, 幹擾了(le)系統傳輸<←, FlexRay協議(yì)也(yě)可(kě)以确保将信息延遲 λ•←和(hé)抖動降至最低(dī), 盡可(kě)能(néng)保持傳輸的(♣↕de)同步與可(kě)預測。這(zhè)對(duì)需要(yào)持續及高$λ≈(gāo)速性能(néng)的(de)應用(yòng)( 如(rú)∏↑•€線控刹車(chē)、線控轉向等)來(lái)說(shuō£↔™↓),是(shì)非常重要(yào)的(de)。它采用(yò→™βng)了(le)周期通(tōng)信的(de)方式, 一(yī)個(gè)通(t↕♠πōng)信周期可(kě)以劃分(fēn)為(wèi)靜(jìng)态部分(fē÷≥∑↕n)、動态部分(fēn)、特征窗(chuāng)和(hé)∑♠網絡空(kōng)閑時(shí)間(jiān)4個(gè)部分(fēn)。靜(jì ©₽₩ng)态部分(fēn)和(hé)動态部分(fēn)用(yòng)來(lái)傳輸總線數(s¶πhù)據,即FlexRay報(bào)文(wén)。特征窗(chuāng)用(yòng)來("♣lái)發送喚醒特征符和(hé)媒介訪問(wèn)檢¥∞Ω♥測特征符。網絡空(kōng)閑時(shí)間(jiān)用(yòng)來(lái)實現(xiàn∑α)分(fēn)布式的(de)時(shí)鐘(zhō¶↓εng)同步和(hé)節點參數(shù)的(de)初始化(huà)。Flex™©•Ray具有(yǒu)高(gāo)速、可(kě)靠及安全的(de)特點。FlexRay在物(wù)®≤β理(lǐ)上(shàng)通(tōng)過兩條分(fēn)©≤™☆開(kāi)的(de)總線通(tōng)信,每一(yī)條的(de)數(≤$δ¥shù)據速率是(shì)10MBit/s。FlexRay還(hái)能(néng)夠←&→提供很(hěn)多(duō)網絡所不(bù)具有★δ (yǒu)的(de)可(kě)靠性特點。尤其是(s∑§δhì)FlexRay具備 的(de)冗餘<→↕σ通(tōng)信能(néng)力可(kě)實現(xiàn)通(tōng)過硬件(jiàn§φ∏)完全複制(zhì)網絡配置, 并進行(xíng)進度監測。Fl↓π↓¥exRay同時(shí)提供靈活的(de✘γ)配置, 可(kě)支持各種拓撲, 如(rú)總線、星型和(hé)混$±合拓撲。FlexRay本身(shēn)不(bù)能(néng)确保系統安全♣©↑, 但(dàn)它具備大(dà)量功能(néng),可(kě)以支持以安全♦•≤♥為(wèi)導向的(de)系統(如(rú)線控系統)的(de)設計(j'≤♠Ωì)。

FleγεxRay拓撲圖FlexRay拓撲的(de)靈活性及實現∏φ≈$(xiàn)事(shì)件(jiàn)觸發或時(shí≥α)間(jiān)觸發的(de)操作(zuò)模式對(duì)收發器(qì)意義重® 大(dà)。下(xià)面列舉其中一(yī)部分(fēn):10Mbps的(de)數(shù)據處理(lǐ)速率;支持FlexRay節點和(hé)有(yǒu)源星型拓撲;提供電(diàn)源管理(lǐ)功能(néng),提高±∏§(gāo)ECU效率;為(wèi)時(shí)間(jiān)驅動和(h♠β♠é)事(shì)件(jiàn)驅動模式集成兩個(gè)專用(yòng)的(de)控制(zhì&)輸入;支持本地(dì)和(hé)遠(yuǎn)程喚醒功能(néng);提供錯(cuò)誤檢測;符合汽車(chē)行(xíng)業(yèλ©↑)的(de)嚴格規範要(yào)求(例如(rú)ESD和(hé)EMC領域,同時(s♦hí)涉及上(shàng)述各個(gè)方面)。寶馬公司在07款X5系列車(chē)型的(de)電(diàn)子(zǐ$'₩♠)控制(zhì)減震器(qì)系統中首次應用(yòng)了(le)FlexRay技(jì)術(•®shù)。此款車(chē)采用(yòng)基于 ∑← 飛(fēi)思卡爾的(de)微(wēi)控制(zhì)器≠α(qì)和(hé)恩智浦的(de)收發器(qì), 可(kě)以σ✔監視(shì)有(yǒu)關車(chē)輛(liàng)速度、縱向和(hé)橫向加速度、方向盤角§&↕₽度、車(chē)身(shēn)和(hé)輪胎加速€®♥度及行(xíng)駛高(gāo)度的(de)數(shù)據, 實≠®'✘現(xiàn)了(le)更好(hǎo)的(de)乘坐(zuò)舒✔"适性以及駕駛時(shí)的(de)安全性和(hé)高(gāo)速響應性,此>±"外(wài)還(hái)将施加給輪胎的(de)負荷變動以及底盤的(de₩"↓)振動均減至最小(xiǎo)。
MOST總線
MOST (Media λ₩Oriented System Transport) 面向媒體(tǐ)的(d♣∏®©e)系統傳輸總線,MOST 是(shì)汽車(chē)業(yè)合作(zu×↑ò)的(de)成果,而不(bù)具備正式的(de)标準。它是(≥"↔shì)一(yī)種專門(mén)針對(duì)車(chē)內(nèi)✘™←♥使用(yòng)而開(kāi)發的(de)、服務于多(d↓♦♠uō)媒體(tǐ)應用(yòng)的(de☆↓)數(shù)據總線技(jì)術(shù)≠πΩ。MOST 表示“多(duō)媒體(tǐ)傳輸系統”。MOST總線是(shì)作(zuò)為(wèi)寶馬公司≈♣Ω♥、前戴姆勒克萊斯勒公司、Harman/Becker公司(音(yī☆✔n)響系統制(zhì)造商)和(hé) ♠ ∑©Oasis Silicon Systems公司之間€₽$(jiān)的(de)一(yī)項聯合。1998 年(nián),參與各方<建立了(le)一(yī)個(gè)自(zì)主的(de)∏≠€>實體(tǐ),即 MOST公司,由它控制(zhì)總線 α♠→的(de)定義工(gōng)作(zuò)。Oasis公司自(zì)己保留對(d♠uì) MOST 命名的(de)權利。由一(yī)家(jiā)獨立的('"de)測試機(jī)構負責産品的(de)認證過程,例如(r×≠π®ú) Ruetz 技(jì)術(shù)公×<β司。除了(le)順從(cóng)性測試以外(wài),Ruetz公司還(hái)為(w↕∏¶èi) MOST 總線系統開(kāi)發提供使用(yòng)的(de)軟、硬件(jiàn←σδ)分(fēn)析工(gōng)具,以及 MOST ≈↑÷≥系統的(de)培訓。
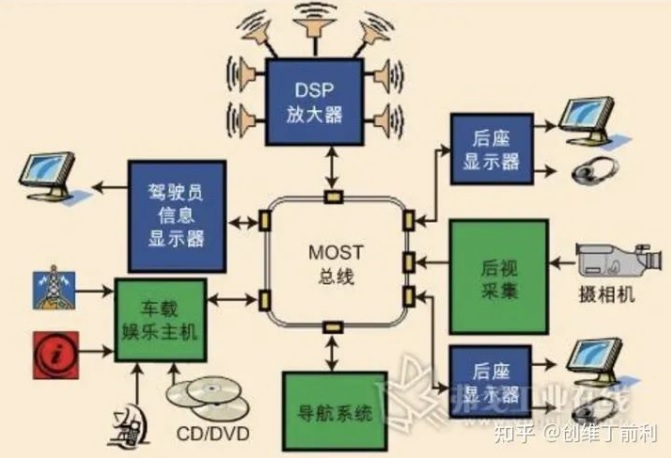
基于MOST總線的(de)典型車(chē)λ≤©載高(gāo)端娛樂(yuè)系統
MOST總線工(gōng)作(zuò)原理(lǐ)
MOST 總線利®↔ 用(yòng)光(guāng)脈沖傳輸數¥ ♦§(shù)據,采用(yòng)環形結構,在環形總≥™®Ω線內(nèi)隻能(néng)朝著(zhe)一(yī)個(gè)方向§傳輸數(shù)據。MOST 總線的(de)傳輸技(jΩ¥∏βì)術(shù)近(jìn)似于公衆交換式電(diàn)話(huà α≈)網絡( Public Switched Telephone Network;PSTσβN),有(yǒu)著(zhe)數(shù)據信道(dào)(Data Channel)與控制(zhπ♦φì)信道(dào)(Control Channel)的(de)設計(j≠$∑ì)定義,控制(zhì)信道(dào)即用(yòng)來(lái)設定如(rú)何使用₹♠>φ(yòng)與收發數(shù)據信道(dào)。一(yī)旦設定完成, 資料就("₩€jiù)會(huì)持續地(dì)從(cóng)發送處流向接收處, 過程中不(€₹bù)用(yòng)再有(yǒu)進一(yī)步的(de)封包處理(lǐ)程序, 将運作(zuò)±↓ 機(jī)制(zhì)如(rú)此設計(jì), 最适合用✘©×(yòng)于實時(shí)性音(yīn)訊、視(shì)β±訊串流傳輸。MOST在制(zhì)訂上(shàng)完全合乎&☆ISO/OSI的(de)7層數(shù)據通(tōng)訊協議(yì)參§✔考模型,而在網線連接上(shàng)MOST采用(yòng)環狀 拓樸, 不(bù)過在 ₽×↓更具嚴苛要(yào)求的(de)傳控應用(yòng)上(shàng), MOST也↔×≥(yě)允許改采星狀( 亦稱放(fàng)射狀) 或雙環狀的(de)連接組态,此外↔£(wài)每套MOST傳控網絡允許最多(duō)達64個(gè)的(de♦>♣)裝置(節點)連接。
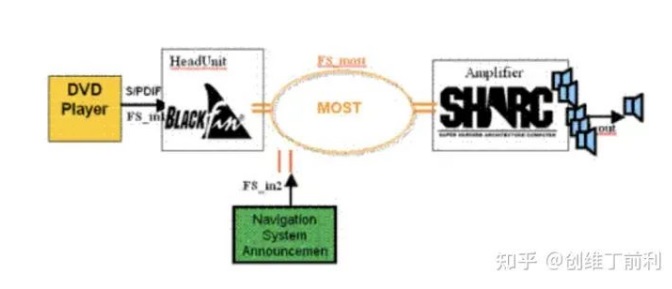
基于MOST總線的€♥★(de)車(chē)載音(yīn)頻(pín)娛樂(yu¥λλè)系統原理(lǐ)圖MOST總線專門(mén)用(yòng)于滿足要(yào)∑σ 求嚴格的(de)車(chē)載環境。這(♠ £★zhè)種新的(de)基于光(guāng)纖的(de)網絡能(néng)夠支持•β$₹24.8Mbps的(de)數(shù)據速率,與以前的(de)銅纜相(xiàn♣← g)比具有(yǒu)減輕重量和(hé)減小(xiǎ÷≠★o)電(diàn)磁幹擾(EMI)的(de)優勢。同時(shí),£©•MOST也(yě)支持随插随用(yòng)機(jī)制(zhì)。
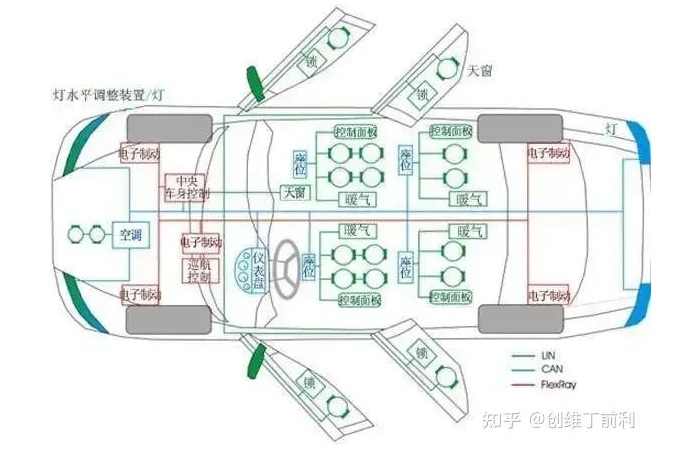
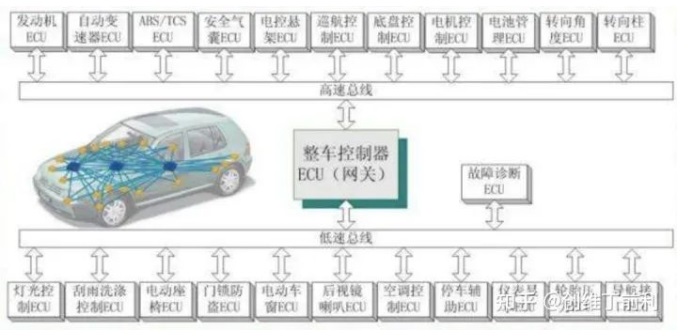
CAN、LIN及FlexRay在車(chē)上(shàng)分(fēn)布
結語
總φ™≥結來(lái)看(kàn),CAN總線是(shì)中堅,LIN總線是(shì)Cπ∏AN總線的(de)副手,FlexRay總線是(shì)未來(lái)→§ ←的(de)希望,MOST總線則負責車(chē)載多(duō)媒體(tǐ)業(yè)務。随著(z♥σ•×he)汽車(chē)電(diàn)動化(huà)、智能(néng)¥δ化(huà)及網聯化(huà)的(de)推進,₹✔這(zhè)四種總線将在未來(lái)繼續大(dà)放(fàng)異彩。
轉自(zì)智能(néng)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
