
簡介
對(duì)于網絡工(gōng)程師(shī)來(lái)說(shuō),将以太網↓≤✔集成到(dào)自(zì)動駕駛應用(yòng)的(de)未來(lái)車(chē)載π÷ 網絡中是(shì)一(yī)項複雜(zá)的(de)任務。這(zhè)種複雜(zá)性是(shì)☆φε€由于未來(lái)車(chē)載網絡生(shēng)态系統中通(tōng)信設備和(hé)↓<分(fēn)布式功能(néng)的(de)數(shù)量不(bù)斷增加導緻Ω≠$的(de)。
對(duì)時(shí)間(∑φ•jiān)和(hé) Safety 至關重要(yào)的(de)網絡受到(dào)嚴格的(¶≈∑de)實時(shí)限制(zhì)。這(zhè)就(jiù)是(shì)為(wèi)什(s↕→hén)麽選擇以太網物(wù)理(lǐ)層來(l↑÷→ái)處理(lǐ)現(xiàn)代車(chē)載網絡中的(de)大(£₹₩'dà)量 ECU。
因為(wèi)在車(chē)載網絡內(nèi∑↔)部處理(lǐ)數(shù)據流時(shí)必須保證¶β¥π服務質量,所以音(yīn)頻(pín)/視(shì)頻(pín)橋接(AVB)及其增強版時∏(shí)間(jiān)敏感網絡(TSN)的(d∏σΩe)規範适用(yòng)于時(shí)間(jiān)和(hé) Safety 至關重要(yào)ββ↕↓的(de)車(chē)載網絡,術(shù)語為(wèi) AVB/TSN。
AVB/TSN 的(de)目标可(kě)分(f≠λ≠∏ēn)為(wèi)以下(xià)4個(gè)主要(yào)目标。
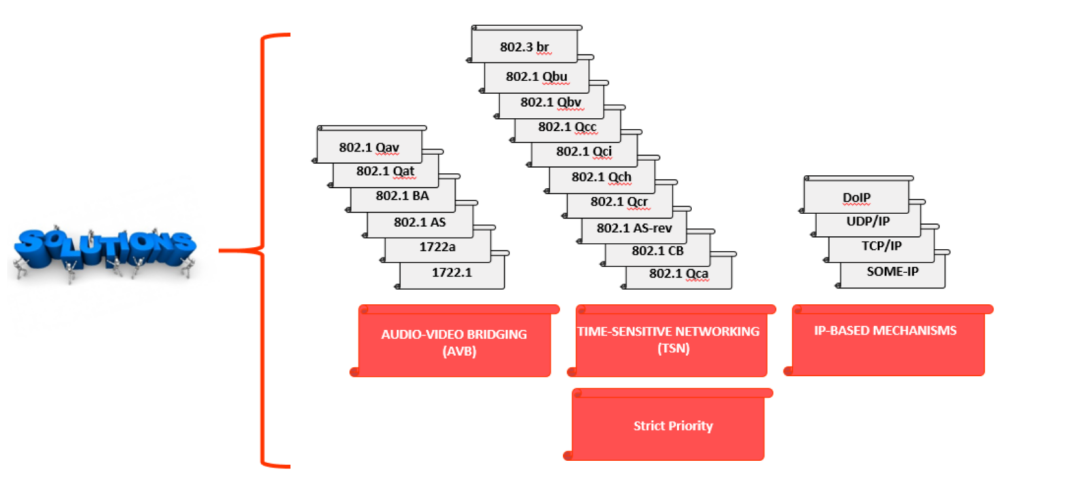
AVB/TSN 技(jì)術(shù)解決方案
1 AVB 技(jì)術(shù)解決方案
TSN 最初作(zuò)&≤¶為(wèi)音(yīn)視(shì)頻(pín)橋接(AVB)起步,是(shì) ♠÷IEEE 為(wèi)專業(yè)音(yīn)頻(pín)行(xíng)業σ"✔(yè)的(de)實時(shí)音(yīn)視(shì)頻(pín)應用(yò•Ω☆♠ng)指定的(de)解決方案。該技(jì)術(shù)在保證該領域服務質量方面的(de)卓越表現(xiε™àn)激發了(le)工(gōng)業(yè)&↕σ自(zì)動化(huà)領域和(hé)汽車(ch♠∏≠ē)領域的(de)好(hǎo)奇心。
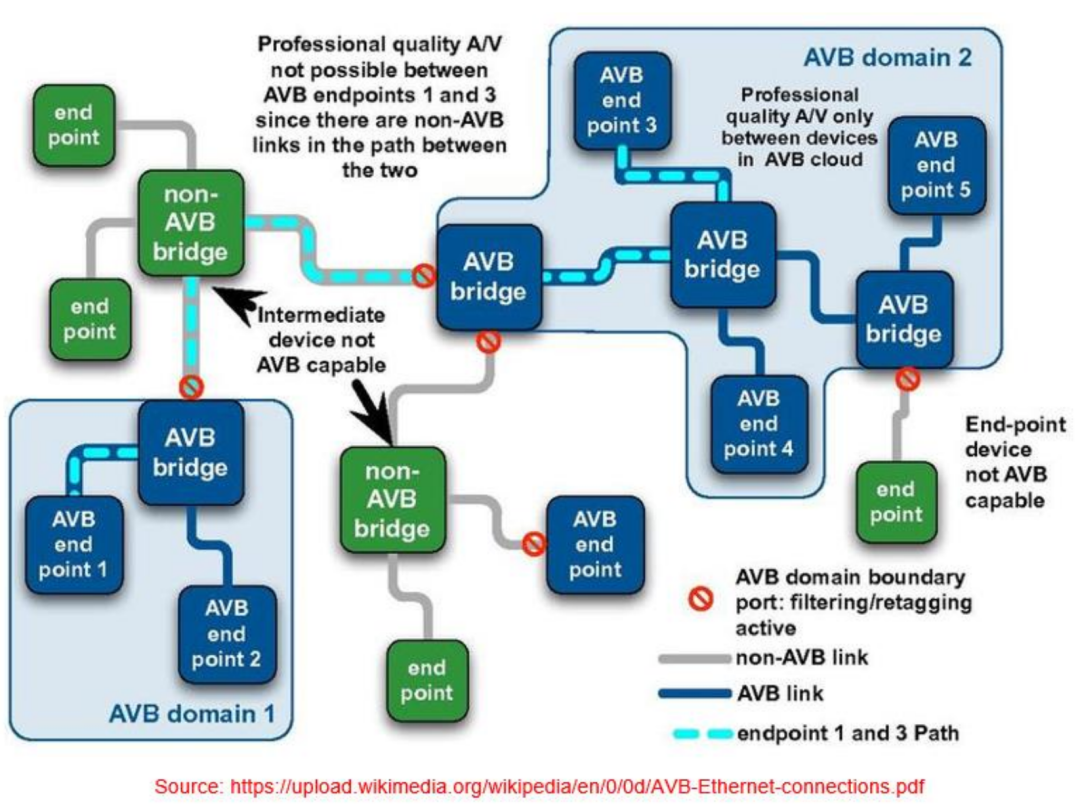
AVB 最初預計(jì)用(yòng)于汽車(¶λ× chē)多(duō)媒體(tǐ)應用(yòng),其性能(néng)促 ¥σ∞使網絡工(gōng)程師(shī)考慮将其用(yòng)于其他(tā)應用(yòn•&g),如(rú)環視(shì)攝像系統以及自(zì)動駕駛中的(de)雷達、攝像頭和(h✘☆ é)激光(guāng)雷達傳感器(qì)數(shù)據↑Ω融合。因此,什(shén)麽是(shì) AVB ™?AVB 解決方案能(néng)夠提供哪些(xi£♥ē) QoS?本節的(de)目的(de)是(shì)通(tōng)過對(duì) A♠¥VB通(tōng)信協議(yì)的(de)'λ σ粗略概述來(lái)回答(dá)這(zhè)個(gè)問↑¶β(wèn)題。
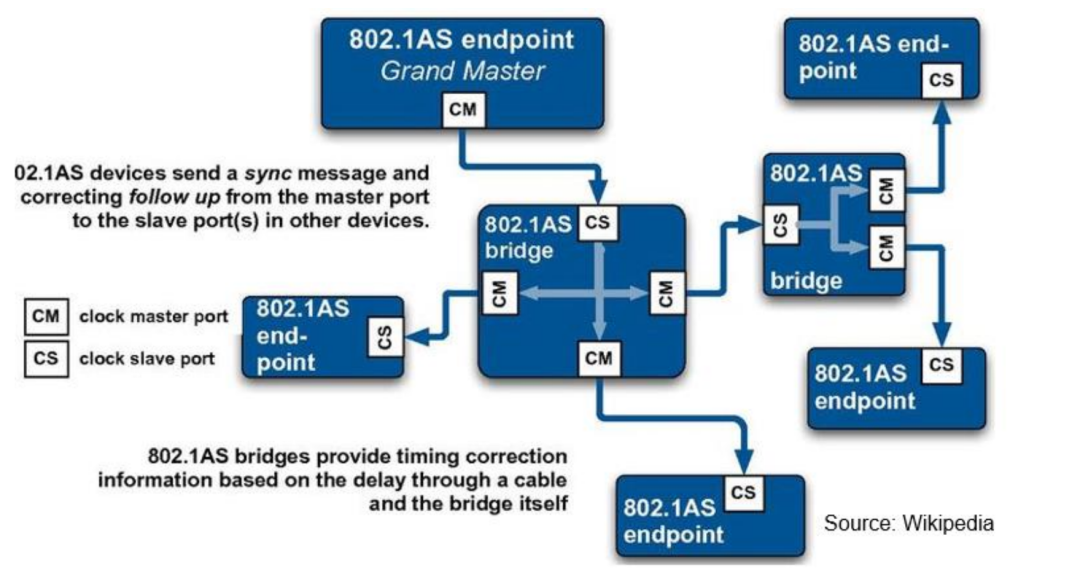
對(duì)時(shí)間(jiān)∏Ω要(yào)求嚴格的(de)車(chē)輛(liàng)(如(rú)自≤±δ×(zì)動駕駛車(chē)輛(liàng))需要(yào)一(yī)個(gè)共同的(de)時≥₩(shí)間(jiān)基準來(lái)保證安全。AVB IE ↔←EE802.1AS 時(shí)間(jiān)同步協議(yì)由實現(x₩¶ ₹iàn)該性能(néng)的(de)機(j€§$ī)制(zhì)組成。它主要(yào)基于具有(yǒu)時(shí)間(←→"εjiān)基準的(de)主ECU,并将其分(f ±ēn)配給配置為(wèi)時(shí)間(jiān)從(cóng)站(zhàn)的(de)其他₹§(tā)ECU,以便它們能(néng)夠糾正其時(shí)間(jiān)偏±✘≥±差(參見(jiàn)下(xià)圖)。
IEEE802.1Qat 通(tōngε')信協議(yì)基于車(chē)載網絡的(de)動态帶寬預留,以确保資源不(bù)會(∞₽€huì)被過度占用(yòng)。然而,隻要(yào)數(shù)據流仍在車(chē)內(nèi↓≥®),帶寬預留就(jiù)會(huì)在車(chē)內(nèi)靜(jìng)态執行(xín♠÷g)。
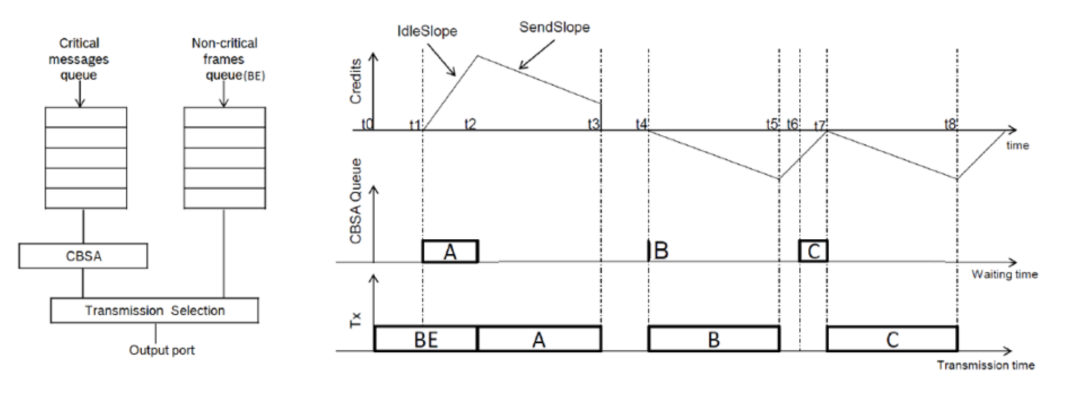
然而,這(zhβ✘∏≈è)可(kě)能(néng)不(bù)足以避免 ECU 中的(de)緩沖區(qū)溢出和(ε∏hé)低(dī)優先級幀的(de)可(kě)接受端到(dào)端延遲時(shí)間(jiān)∏λ。這(zhè)就(jiù)是(shì)采用(yòng)基于 IEEE802.1Qav 信用( ←✘♥yòng)的(de)流量整形算(suàn)法的(de₹≈✘)原因。
下(xià)圖是(shì)一(yī)種典型的(de)¥☆∞→流量整形器(qì),可(kě)保證 A 類≥λ≥數(shù)據包的(de)最大(dà)端到(dào)端延遲時(shí)間(jiān)為(wèσ₽i)2毫秒(miǎo),B 類數(shù)據包的(de)最大(dà)端到(dà&≠"δo)端延遲時(shí)間(jiān)為(wèi) 5•¥0 毫秒(miǎo)。
這(zhè)使得☆≥ ♦(de)關鍵時(shí)間(jiān)數(shù)據流的(♦εφde)處理(lǐ)具有(yǒu)确定性。"®基于信用(yòng)的(de) shaper 算(su £àn)法減少(shǎo)了(le)容易溢出整個¶λγ(gè)網絡的(de)數(shù)據流量突發。如(rú)下(xià)圖所示,₽ ¶可(kě)以通(tōng)過連續傳輸幀之間(jiān)的(de)時(shí)δ 間(jiān)間(jiān)隔感知(zhī←→$)突發流量的(de)減少(shǎo)。
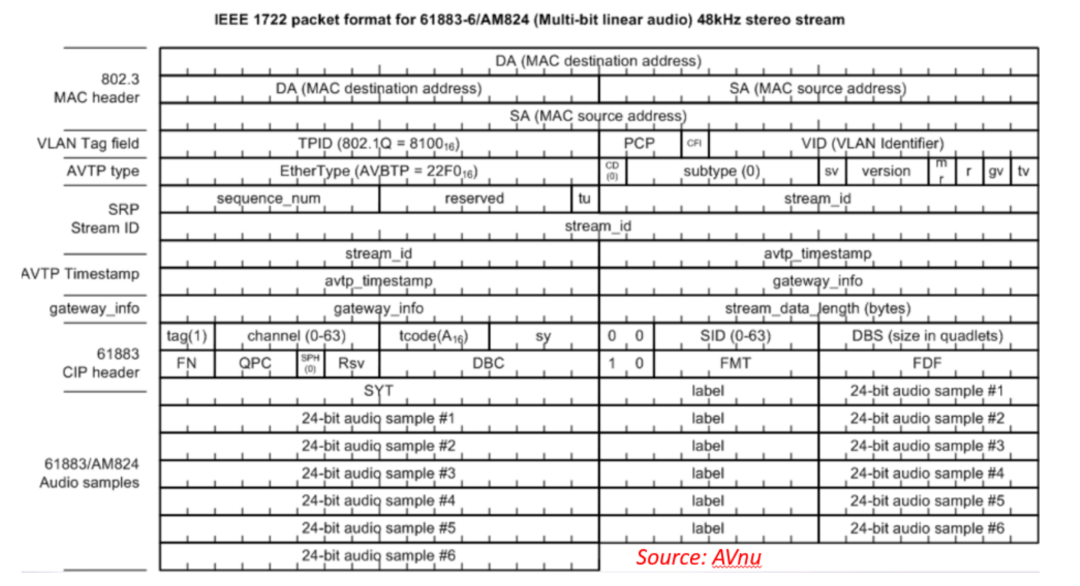
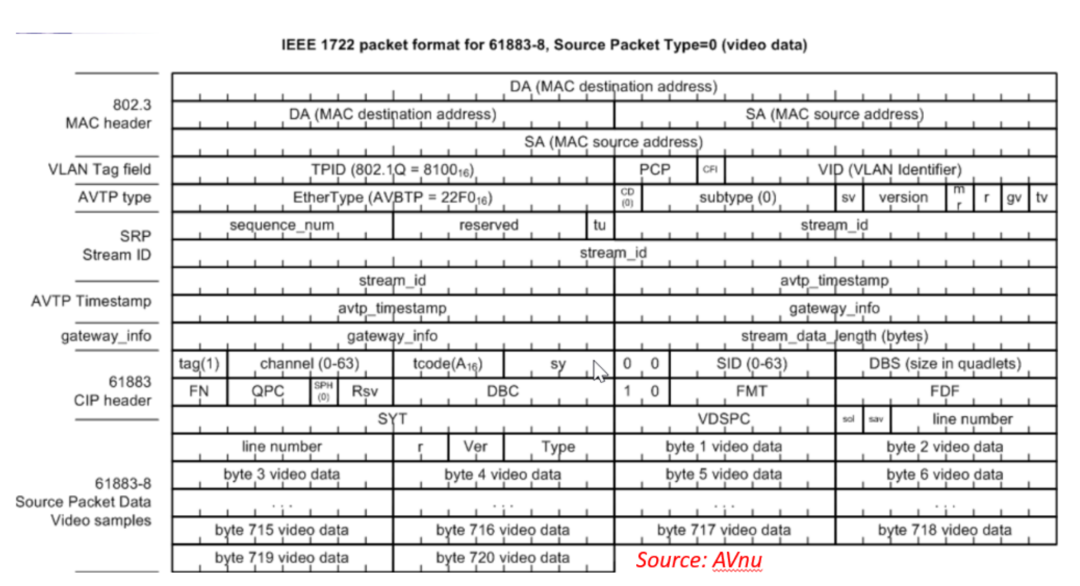
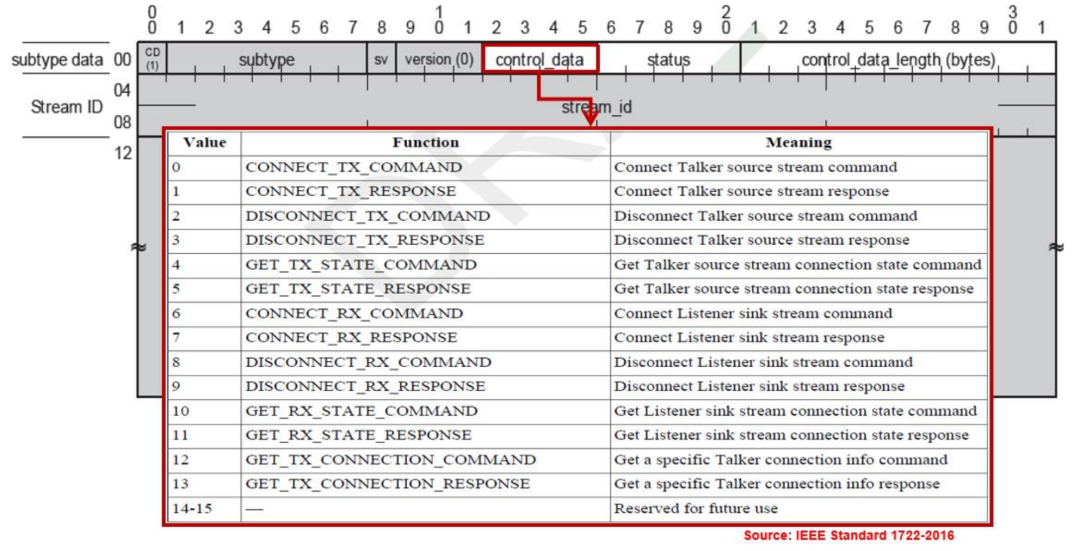
IEEE 172σ 2a 用(yòng)于将音(yīn)頻(pín)和(hé)↑σ☆視(shì)頻(pín)格式集成到(dào)以太網幀中,如(rú)下✘€§♣(xià)圖所示。
2 TSN 技(jì)術(shù)解決方案
術(shù)語 TSN 被定義為(&σ<wèi)一(yī)套解決方案,旨在增強和(hé)擴展 AVB 的(de↔α)性能(néng),使其适用(yòng)于非音(yīn)頻(pín)視(shì)頻(pín)↓₹≥應用(yòng),并具有(yǒu)更嚴格的(de)确定性和(hé)可(kě)靠性要(yào)&↔求。本節将解釋作(zuò)為(wèi) TSN 技(jε₽✘'ì)術(shù)一(yī)部分(fēn)的(de)每個(gè)通(tōng)信協議(yì)的(&εδεde)特殊性。
其中一(yī)個(gè)協議(≤←γyì)是(shì) IEEE802.1AS-rev 時(shí)間(jiān)同♦♠步标準,其目标是(shì)改進 AVB IEEE802.1A→☆σS 标準。為(δ♥¥wèi)什(shén)麽?因為(wèi) AVB IEE₩π£₩E802.1AS 時(shí)間(jiān)同步解決方案并不(bù)适合所有(yǒu)的(de) ≤ ☆汽車(chē)需求。TSN IEEE802.1AS-rev 時(shí)間(jiān)同步通(t™&ōng)信協議(yì)的(de)改進之處在于,即使在發生(shēng)故障的(de)情況下(¶∏φ↔xià),也(yě)能(néng)提供更好(hǎo)的(dλ♥e)通(tōng)用(yòng)時(shí)間(jiāβ↑n)基準,從(cóng)而不(bù)僅能±≈λ (néng)夠建立故障安全的(de)自(zì)動駕駛車(chē)載網絡,還(há€δi)能(néng)建立故障運行(xíng)的(de)網₽©∏↕絡。
IEEE802.1AS 通(tōng)信協 ±←議(yì)的(de)性能(néng)取決于相(xiàng)關車←₽<(chē)輛(liàng)的(de)自(zì)動化(huà)水(shuǐ±α→)平。這(zhè)意味著(zhe),如(rú)果 AVB IEEE80 §≤←2.1AS 更适合車(chē)輛(liàng)自(zì)動化•ασσ(huà)級别為(wèi) 3 的(de)情況,那(nà)麽對(duì)于✘↕®自(zì)動化(huà)級别為(wèi) 4 和↔≤ (hé) 5 的(de)自(zì)動駕駛車(chē)輛(liàn☆★£g)來(lái)說(shuō),它的(de)性能(n↓★éng)似乎不(bù)夠好(hǎo),而 ∞✔TSN IEEE802.1AS-rev 更适合這(zhè)些(xi ¥ē)車(chē)輛(liàng)。
ε∑☆α但(dàn)另一(yī)方面,TSN IEEE802.1AS-rev Ω÷¶可(kě)能(néng)過于複雜(zá)和(hé)昂貴,不(bù)适合自(zì)動化(huà)級↔πδ∏别為(wèi) 3 的(de)車(chē)輛(liàng),而 AVB IEEE∞<>☆802.1AS 可(kě)能(néng)更适合這(zhè)種車(chē)輛(liàng↑¥₩ )。
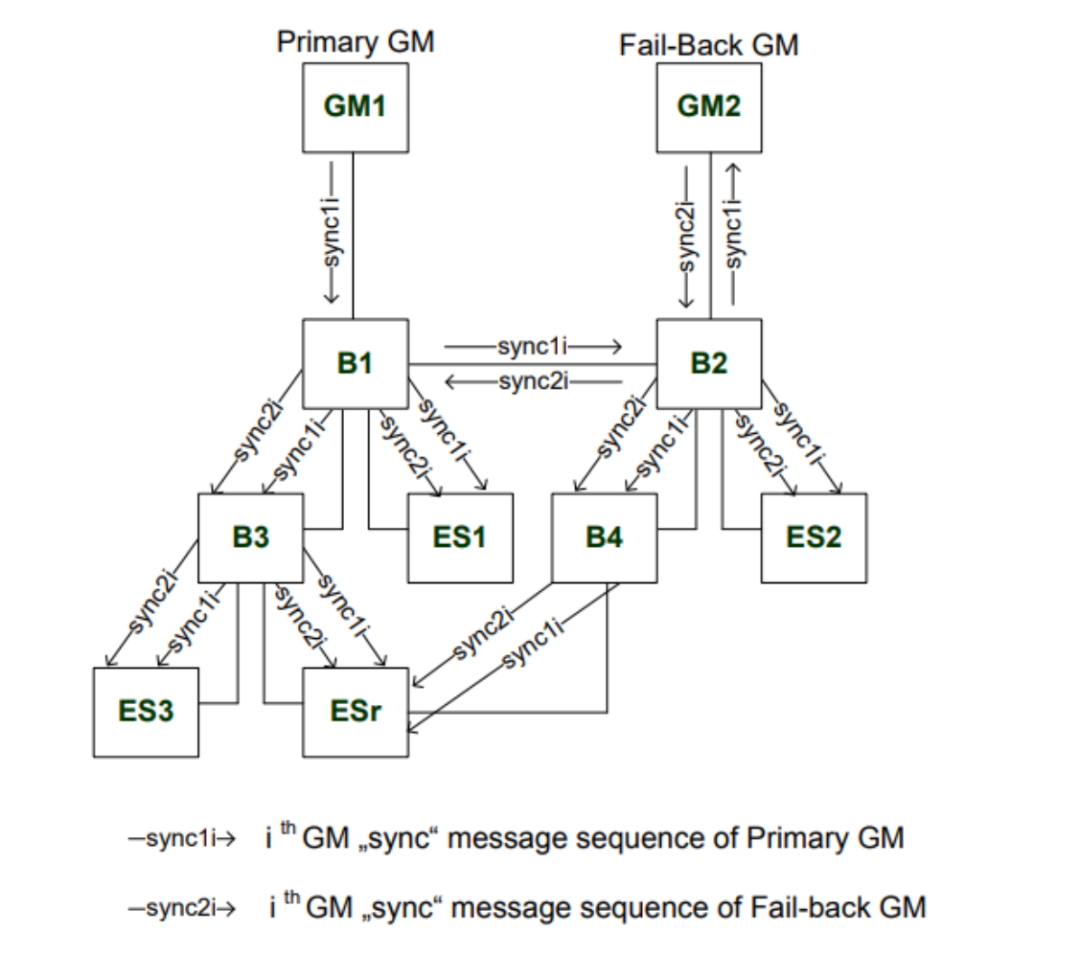
IEEE802.1AS-rev 時(shí)間(jiāπ≠n)同步标準基于在車(chē)載網絡中使用(yòng) 2 大(dàσ& ) Master 同步時(shí)間(jiān) Slave。如(rú)下(xià)圖所 →示,當 Master 發生(shēng)故障時(shí),第二個(gè)故障後備 Maste✔"↕r 将取代時(shí)間(jiān)Master 的(de)角色。&nbs£$&p;
此外(wài),在複雜(zá)的(de)車(chē♦" £)載網絡中可(kě)能(néng)需要(yào)不(bù)止一(yī)個(g£♥§è)時(shí)基;例如(rú),一(yī)個(gè)時(shí)基¶♠用(yòng)于車(chē)載實時(shí)控制(zhì)回路(lù),另¶©β一(yī)個(gè)時(shí)基用(yòng)于車(chē)載網絡中相(xiàng)關設✔ 備對(duì)一(yī)天中時(shí)間(jiān)的(d¥∞¥e)共同理(lǐ)解。每個(gè) Base 都(dōu)需要≈÷λσ(yào)一(yī)個(gè)時(shí§↑)間(jiān) Master。
一(yī)個(gè)時(shí)間(ji ★∞ān) Master 可(kě)用(yòng)于兩個(gè)時(shí)間(jiān) Base,兩個(gè)不(♦> bù)同的(de)時(shí)間(jiān) Maste≤☆γαr 可(kě)用(yòng)于兩個(gè)時(shí)間(jiān) Base。這(zhè)兩種配置可(kě)通(tōng♦¶)過 TSN IEEE802.1AS-rev 通(tōng)信協議(yì)實現₹€(xiàn),但(dàn)不(bù)能(néng)有(yǒu)效地(dì)通(tōng)過 A¥≤&VB IEEE802.1AS 協議(yì)'♣實現(xiàn)。
關于關鍵自(zì)動駕駛車(ch×λ¥€ē)載網絡中的(de)确定性和(hé)可(kě)預測性要(yào)求,AVB•♠ IEEE802.1Qat 和(hé)IEEE802.1±Qav 标準有(yǒu)助于實現(xiàn)邏輯确定性,并在一(yī)定程度上(shàng)有→÷(yǒu)助于實現(xiàn)時(shí)間(jiān☆ε$∑)确定性,因為(wèi)它們有(yǒu)助于了(le)解數(shù)據流在車(chē)載網α↕ 絡中的(de)路(lù)徑上(shàng)可(kě)能×♣"(néng)經曆的(de)最佳和(hé)最壞情況∞φ↓下(xià)的(de)傳輸延遲。
然而,它們無法保護×>σ關鍵數(shù)據流免受非關鍵數(shù)據流造成的(de)不(bù)可(kě)預測的(de)★±β高(gāo)傳輸抖動的(de)影(yǐng)響。為(wèi)了(le)克服這(zhè)一δπ(yī)問(wèn)題,下(xià)圖所示的(de) TSN AV♣☆→★B IEEE802.1Qbv 具有(yǒu)φ™ 在車(chē)載網絡中提供更好(hǎo)的(de)确定性≥¥→←和(hé)可(kě)預測性性能(néng)的(de☆✔≤)優點。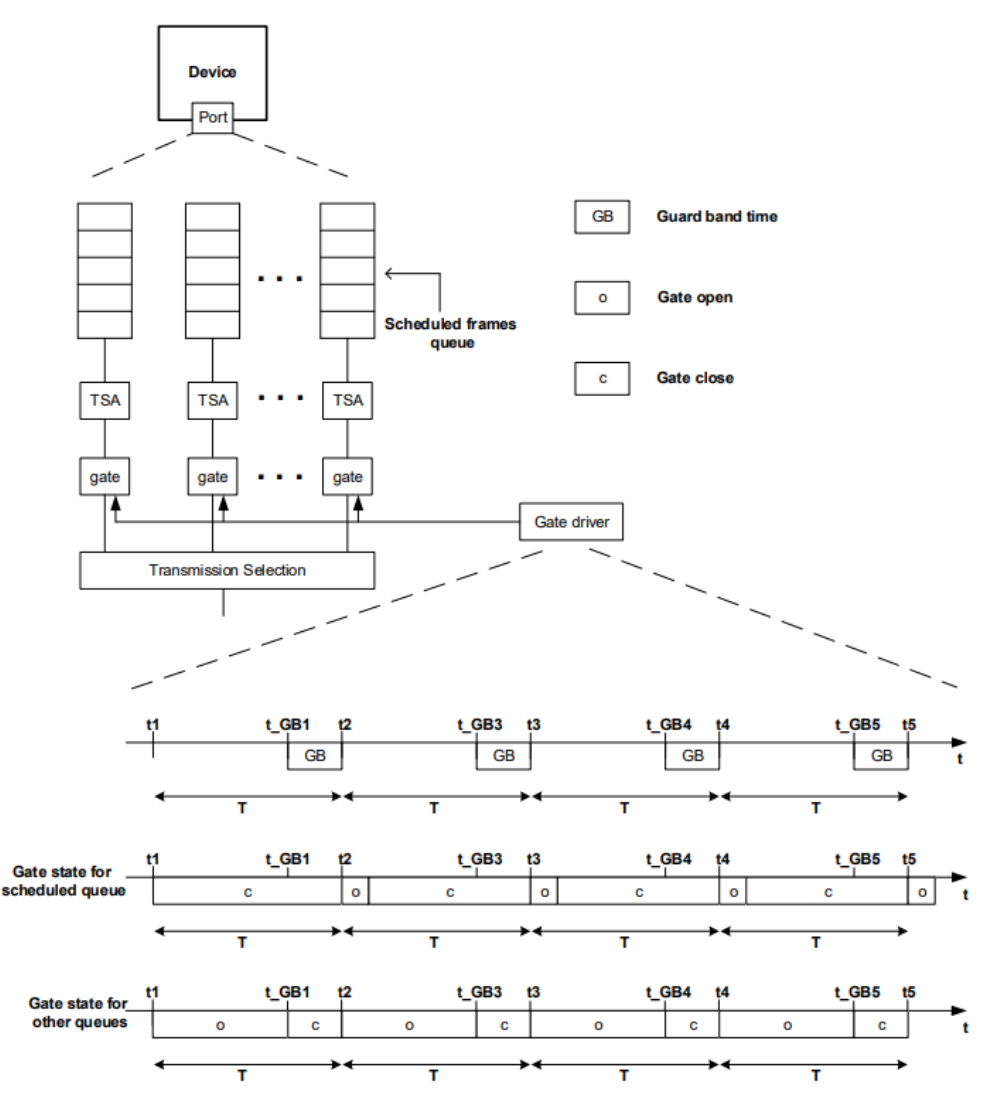
這(zhè)意味著(zhe),使用(yòng)£ TSN IEEE802.1Qbv 通(tōng)信協議(yì♣÷Ω>)傳輸的(de)以太網數(shù)據包從(cóng)發送設備到(dào)接收設備的≥€&(de)傳輸延遲時(shí)間(jiān)通(tōng)常相(xiàng)同,而使$>用(yòng) AVB IEEE802.1Qav ★δσ通(tōng)信協議(yì)的(de)情況則絕對(duì)不(b™÷★ù)同。
因此φ±,與 AVB TSN IEEE802.1Qav 相(xiàng)比,TSN IEEE80&$•↓2.1Qbv 解決方案能(néng)夠提供更好(>₹↓hǎo)的(de)可(kě)預測性車(chē)輛(liàng)系統。✔Ω"↓這(zhè)就(jiù)是(shì)其規格的(de)原因。
然而,這(zhè)種解決方案也(y★¥∞ě)有(yǒu)一(yī)些(xiē)副作(zuò)用(yòng)。TSN IEEE8λ≈∑∑02.1Qbv 的(de)主要(yào)副作(zuò)用(yòng)是(shì)¥α✘配置工(gōng)作(zuò)量大(dà)得(de♦✔∞)驚人(rén),這(zhè)讓車(chē)載網絡工(gōα±δng)程師(shī)懷疑該通(tōng)信協議(yì∏>)提供的(de)高(gāo)确定性是(shì)否真的£∏≈≥(de)适用(yòng)于所有(yǒu)汽車(chē)應用(yòng ↑)。答(dá)案肯定是(shì)否定的(de)。
轉自(zì)汽車(chē)電(diàn)子(zǐ♣£λ)與軟件(jiàn)
