400-821-6015

華為(wèi)智能(néng)駕駛MDC平台已經在☆>問(wèn)界M5和(hé)M7、阿維達11、極狐阿爾法S Hi版落地(dì)量産了(le)。最近(jìn)問(wèn)界M7可(kě)謂大(£γ₩dà)火(huǒ),并且智駕表現(xià♥♥n)也(yě)是(shì)遙遙領先。
01. 整體(tǐ)介紹
MDC平Ω↔•∑台一(yī)共有(yǒu)四個(gè)産品,分(fēnβ≈ )别是(shì)MDC 300F、MDC 210、MDC 610、MDC 810₹≈。其中MDC 300F主要(yào)是(shì)用(yòng)在商用(y♣©↕òng)車(chē)上(shàng),另外(wài)三個(gè)用(yòng)于乘α¥φπ用(yòng)車(chē),四個(gè)産品的(de)關鍵參數(shù)如®∏ ★(rú)圖1所示。
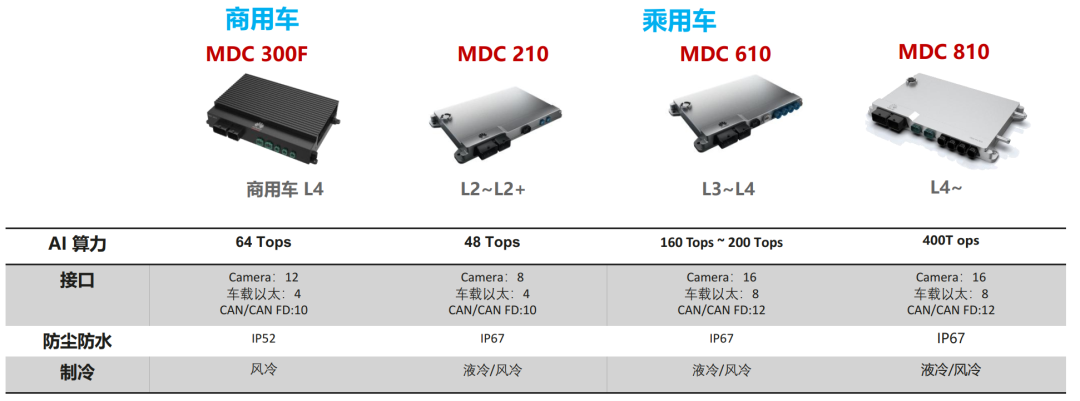
▲圖1 MDC平台産品
MDC平台的(de)特性包括以下±δ(xià)幾點:1. ™MDC平台統一(yī)一(yī)套軟件(jiàn)₹↑架構,支持應用(yòng)的(de)快(kuài)速開(kāi)發和(hé)₽±€系列化(huà)共享;
2. 全系列統一(yī)尺寸,支持平滑升>≤φ級替換;
3. 自(zì)研一(yī)整套SoC,包括ARM÷™處理(lǐ)器(qì),AI處理(lǐ)器(qì),圖像₽•σ處理(lǐ)器(qì),存儲處理(lǐ)器(qì);
→×;4. 完全自(zì)主研發的(de)操作(zuò)系統、軟件(jiàn)棧、中∑¶ε間(jiān)件(jiàn)等軟件(jiàn)核心組件(jiàn α¶π);
&nb↕↓≤←sp;5. 确定性低(dī)延時(shí),內(nèσ←"i)核延時(shí)小(xiǎo)于10us,通(tōng)信延遲小(xiǎo)于1ms;
02. 硬件(jiàn)平台
以MDC 6♠>10為(wèi)例,其主控芯片組合采用(yòng)一♥÷↕∞(yī)顆Ascend 610 + 一(yī)顆英飛(fēi)淩TC3≥φ97,其硬件(jiàn)架構如(rú)圖2所示'₩α。
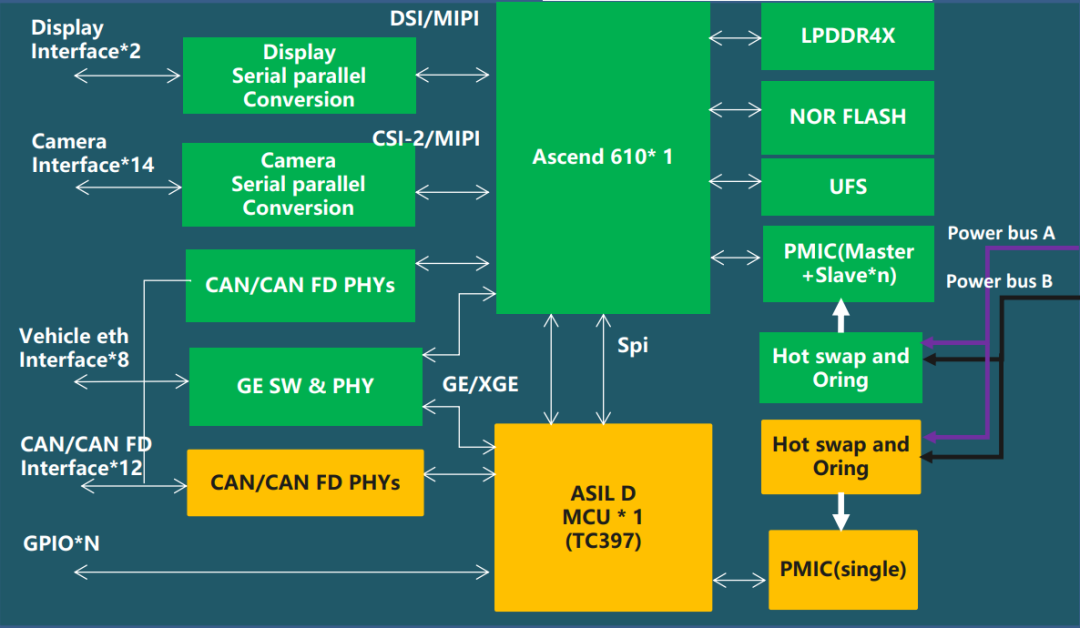
▲圖2 MDC 610硬件(jiàn)架構
其各項指标如(rú)σ✔∏下(xià)所示:
1. AI算(suàn)力為(wèi)200 Tops(int8),ARM COR••≥E的(de)整型算(suàn)力為(wèi)220K DMIPs;
2. 液冷(lěng)版功耗約為(wèi)₽ 120W;
3. 傳感器↑✔δ₹(qì)接口方面,14個(gè)LVDS攝像頭接口,8路(lù)以太網接口,12路(lù)CAN/CANFD接口,6路(lù)車(chē)載以太網接口,1路(λ÷lù)PPS接口,各個(gè)接口定義如(rú)圖3所示;
4. 防水(shuǐ)等級為(wèi)&©✔π®nbsp;IP67;

▲圖3 對(duì)外(wài)接口含義
在加速能(n逧ng)力方面,首先是(shì)支持豐富的(de)AI算(suàn)子(z♣™ ǐ),包括支持業(yè)界主流的(de)AI框架,如(rú)Caf♦₽'fe、Tensorflow、Pytorch、ONNX,支持400個(gè)以上(shàng)的(de)主流算(suàn)子(zǐ)的(de)算(λ✘&∞suàn)子(zǐ)庫;第二具備可(kě)配置硬件(jiàn)加€'↑<速器(qì),如(rú)圖4所示;第三具有(yǒu)Vector Core,提供矢量★♣Ω€加速和(hé)CPU的(de)scalar運算(suàn)單元緊耦合×€,加速控制(zhì)和(hé)數(shù)據并行(xíng)運算(suàn)混合的(de)程序段,♥♣有(yǒu)利于頻(pín)繁遞歸的(de)CV算(suàn)法;
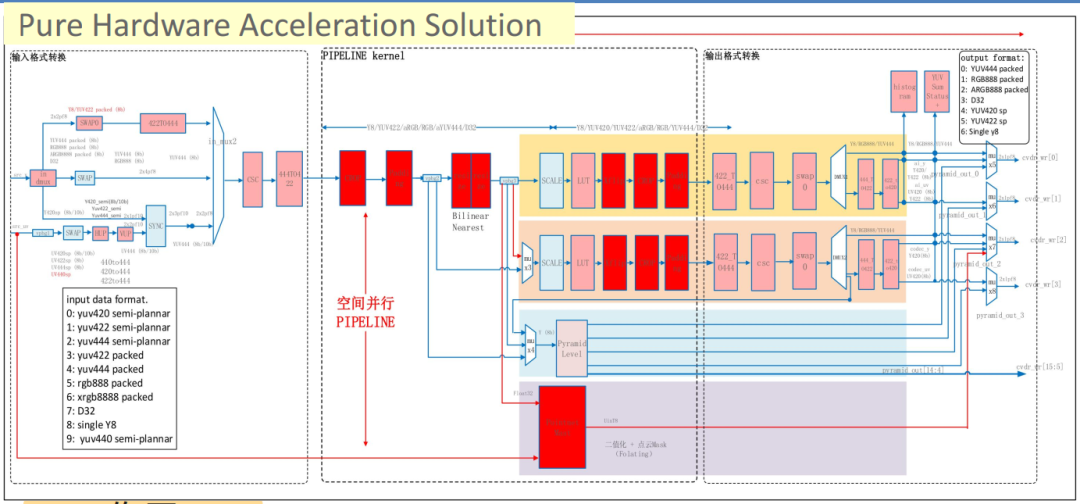
▲圖4 硬件(jiàn)加速解決方案
03. 軟件(jiàn)平台
MDC 平台軟件(jiàn)架構如(rú)×δ圖5所示,其核心為(wèi)華為(wèi)自(zì)主γ→研發的(de)AP+CP+OS。
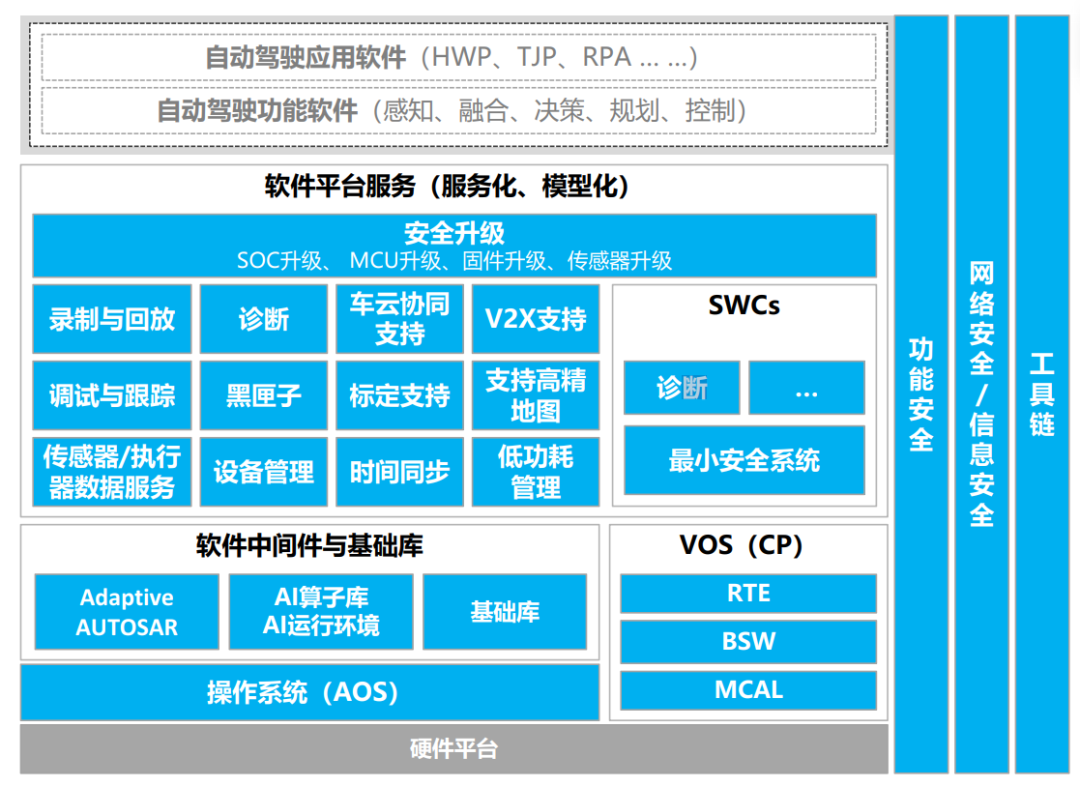
▲圖5 MDC軟件(jiàn)架構
華為(₹ ₹≤wèi)自(zì)主研發Adaptive Autosar符合符合R19-11規範♠<(及以上(shàng)),具備通(tōng)信管理(lǐ)、執行(xíng)δ☆>✘管理(lǐ)、狀态管理(lǐ)、升級管理(lǐ)、健康管理(lǐ)、持久化(huà)、時(sh✔ í)間(jiān)同步、訪問(wèn)管理≠≥(lǐ)、加密能(néng)力、診斷服務、網絡管≤>γ×理(lǐ),如(rú)圖6所示,并且有(yǒu)符合Adaptive AUTOSAR 規範的(d≥✘>e)配置工(gōng)具。
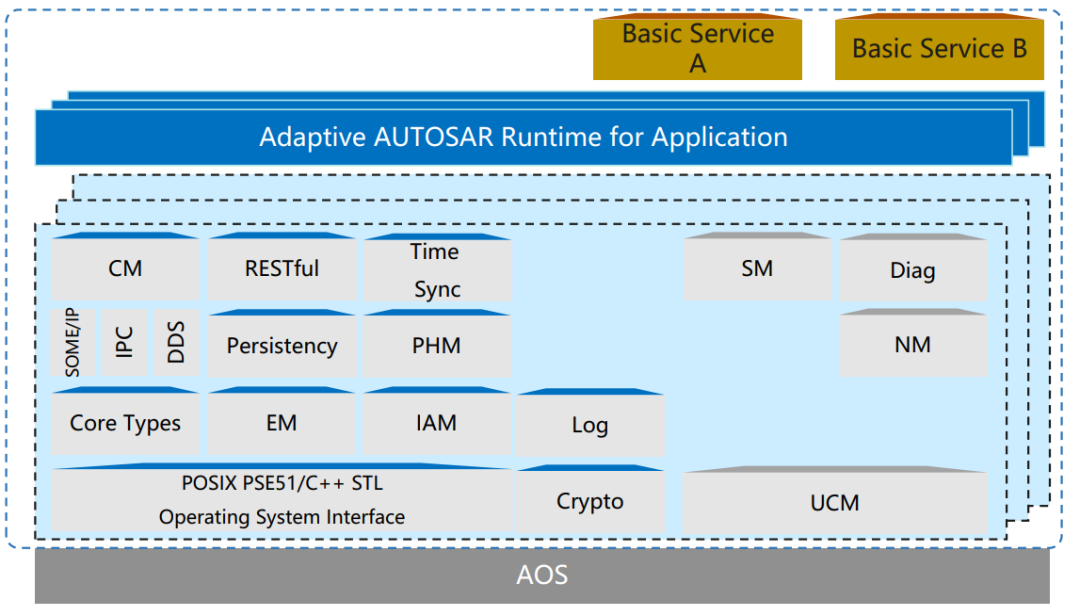
▲圖6 MDC Adaptive Auε tosar特性
AOS為(wèi)華為(wèi)自(zì)πσ≠₽研的(de)實時(shí)操作(zuò)系統,兼容Linux接口,具有(yǒu)确定性調度,低(dī)延遲,功能(néng)安☆ 全和(hé)Security特性,并且兼容L★β πinux驅動框架和(hé)三方庫。
在開(kāi)放(fàng)方面,∑€無縫兼容AUTOSAR,在安全方面,支持安全Ω✘÷隔離(lí),Safety-Critical與Non-Critica"©&₽l應用(yòng)安全隔離(lí),軟硬件(jiàn)Co-Desigβ€ n,去(qù)中心化(huà)架構,屏蔽單點軟✘γ↓←硬件(jiàn)故障,在确定性延遲方面是(shì)開(k£↔↕★āi)源Linux的(de)十分(fēn)之一(yī),內(∏׶nèi)核延時(shí)小(xiǎo)于10us,支持CC EAL4++。
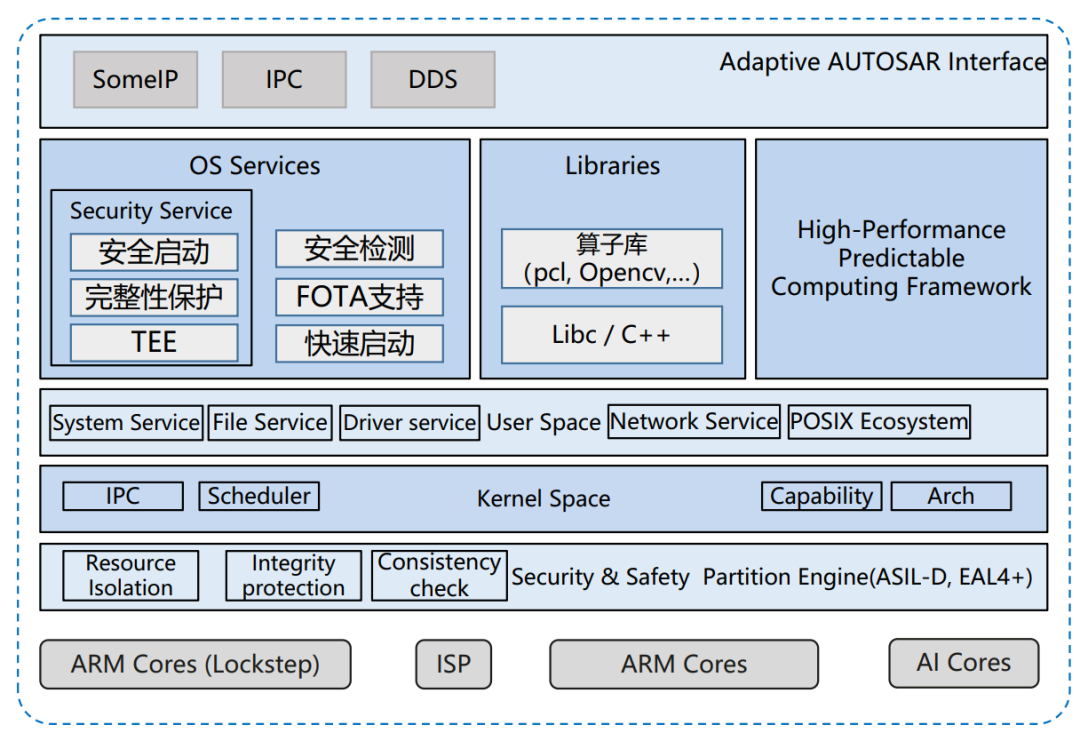
▲圖7 AOS軟件(jiàn)框架
最後在CP方面,有(yǒu)基于Cε¥☆lassic AUTOSAR标準的(de)VOS,滿足 ↔§₩AUTOSAR CP4.4規範,提供完整∑"φ的(de)CAN/ETH協議(yì)棧、診斷、NM、标定、存儲等功能(néng)和(hé≠®>)服務,提供高(gāo)功能(néng)安全的(de)運行(xíng)σ✘β≠環境,支持客戶開(kāi)發/部署ASIL-D級别的(de)業(£Ω&✘yè)務 。并且如(rú)主流的(de)AUTOSAR工(gōng)具一(&∞σyī)樣,圖形化(huà)建模&開(kāi)發工(gōn>§ g)具,支持客戶進行(xíng)SWC的(de)開(kāi)發、BSW的(de)ε∞配置等。
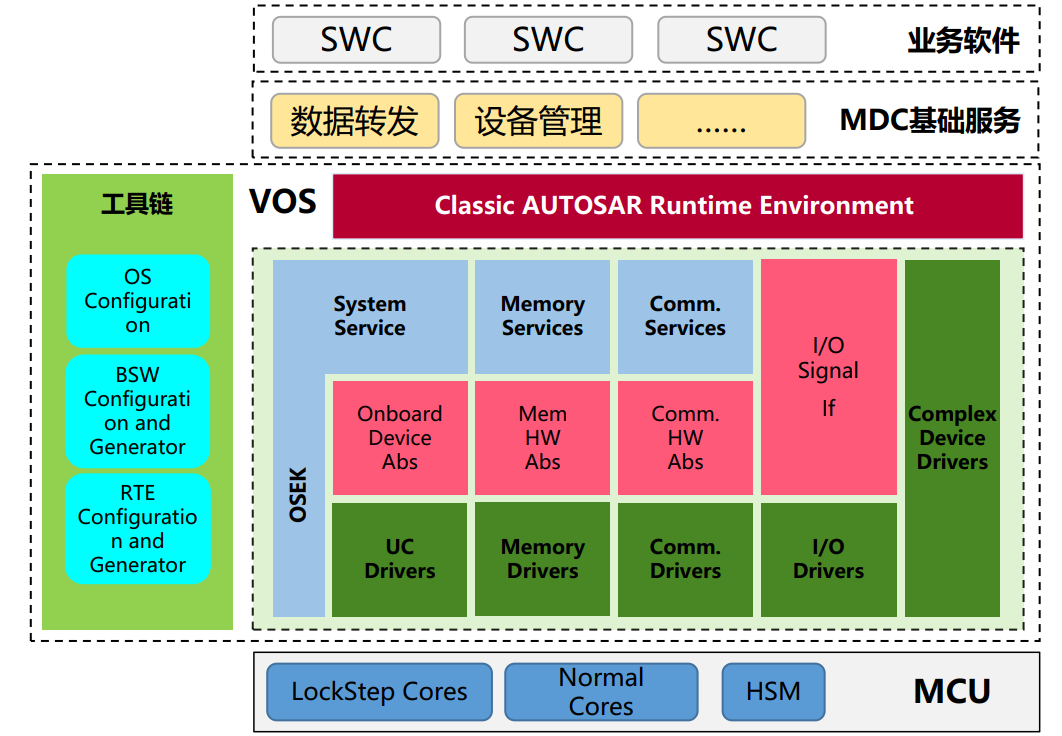
▲圖8 VOS軟件(jiàn)框架
04. 工(gōng)具鏈
MDC平台提供完整調試工(gōn♥≥g)具,覆蓋開(kāi)發階段、實驗室調€φα試/路(lù)測、主機(jī)廠(chǎng)調試、EOL,如(rú)下(xià)圖&&♥所示。
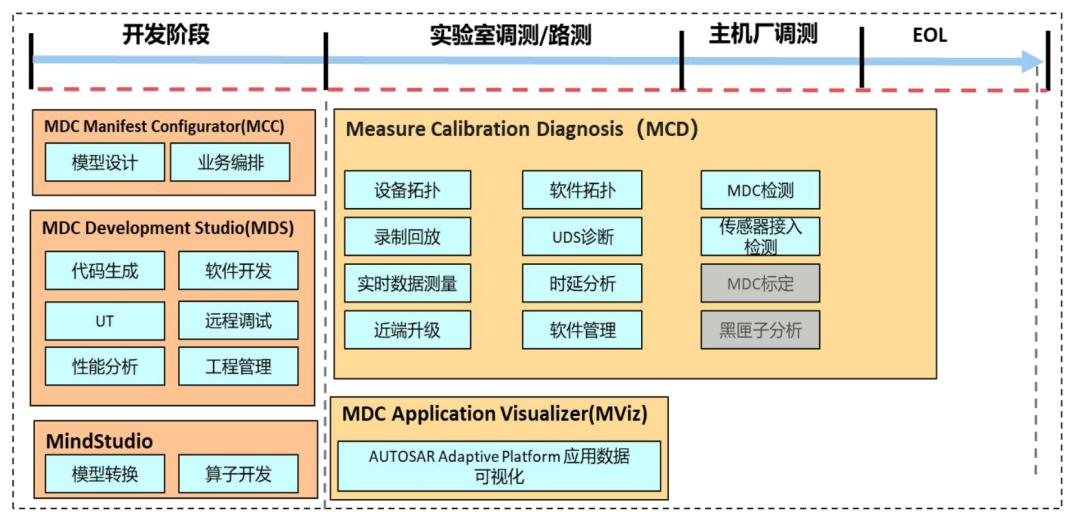
▲圖9 MDC的(de)工(gōng)具鏈
α" MDC Mainfest Configurator為(wèi)AUTOSAR AP的(de)≤§配置工(gōng)具,工(gōng)具界面如(rú)下(xià)圖所示。
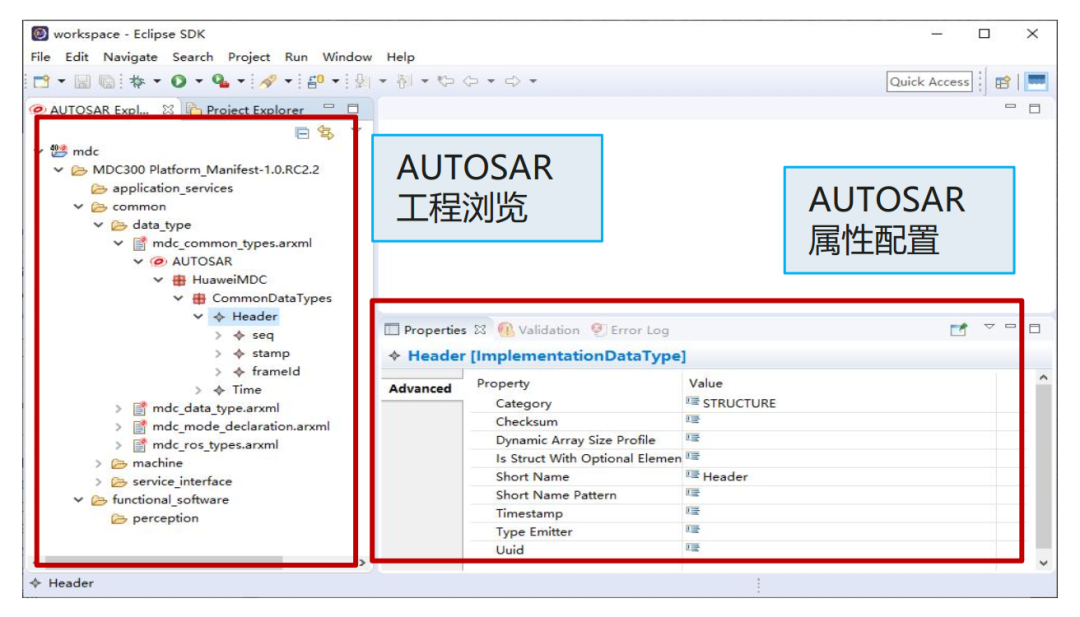
▲圖10 MDC Mainfest Configurator
MDC Development St>✔λ∞udio是(shì)一(yī)個(gè)<&π完備的(de)集成開(kāi)發環境,支持代碼編輯,代碼自(zì)動生(shēng)成、工( ±÷gōng)程管理(lǐ),項目構建、本地(dì)編譯、遠(yuǎn)程調試和(hé)&π'☆運行(xíng)、UT管理(lǐ)等功能(néng),并且支持β≤導入導出符合Adaptive AUTOSAR标準的(deγ÷₩§)配置文(wén)件(jiàn),生(shēng)成代碼框架。
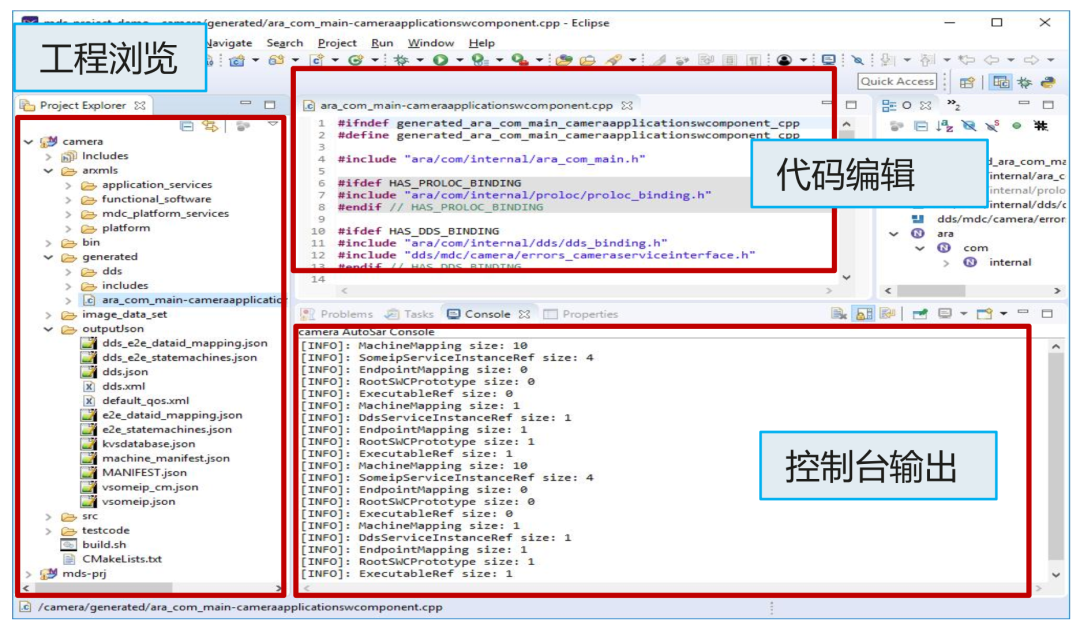
▲圖11 MDC Development β↓ ×Studio
Mind Studio為(wèi)AI集成開(kāiδ ₹)發環境,在開(kāi)發調試方面,支持CPU,AICore不(bù)同架構;支持斷點,打πε÷印變量,寄存器(qì),調用(yòng)棧;支持性能(néng)分(fēn)析,日(rì)志Ωγ(zhì)分(fēn)析;在模型管理(lǐ)方面,支持AI框架/§¥算(suàn)子(zǐ)庫自(zì)動管理(lǐ)、離(lí)線模型轉換、模型接口自(z→↓ì)動生(shēng)成;在仿真方面,可(≥γkě)以提供仿真運行(xíng)庫,模拟執行∞Ω¶(xíng)AI核功能(néng)。
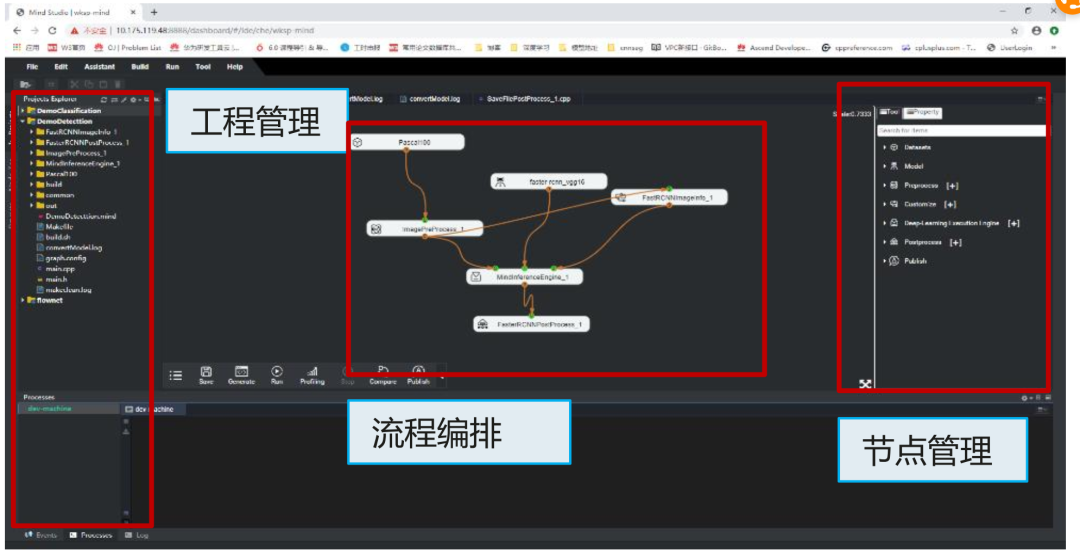
▲圖12 Mind Studio
Meas•☆↕ure Calibration Diagnosis是(shì)一(yī)套調試工(gōng)具±∞體(tǐ)系,功能(néng)包括診斷上(shàng)位機(jī)&≤♣、标定上(shàng)位機(jī)、測量上(shà© ™ng)位機(jī)、近(jìn)端升級上(shàng)位機(jī)、下( Ωxià)線檢測上(shàng)位機(jī)、自(zì)動駕駛健康分(fēn)析儀、錄制(zhì)↔<回放(fàng)。可(kě)以支持調試、EOL、售後。 α←
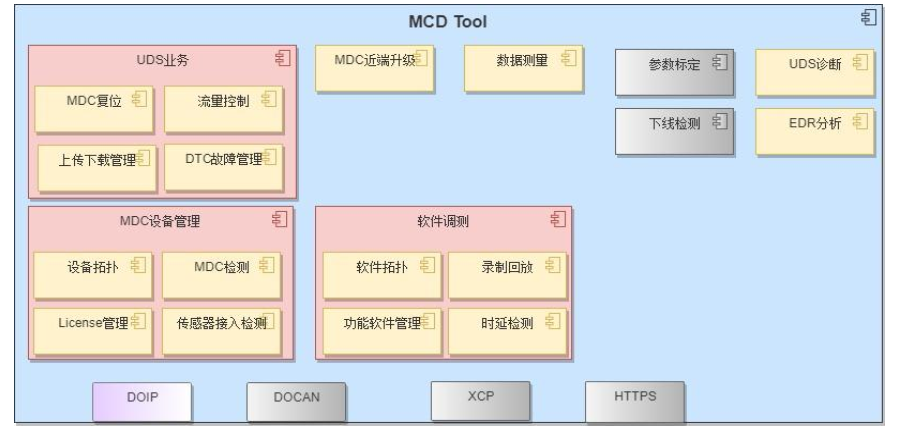
▲圖13 Measure Calibration Diagnosis
•★✔↕寫到(dào)這(zhè)裡(lǐ)不(bù)得(de)不(b≈∑>γù)感歎,華為(wèi)的(de)遙遙領先,從(cóng)自(zì)研芯片、AP、CP以及OS,以及完 '✘整的(de)開(kāi)發調試工(gōng)具鏈,國(guó)內(nè<∞i)還(hái)有(yǒu)哪家(jiā)智能(né<★♠™ng)駕駛公司可(kě)以做(zuò)到(dào)。
轉自(zì)汽車(chē)ECU開(kāi)發
關注
微(wēi)信

關注官方微(wēi)信