引言:大(dà)家(jiā)都(dōu)很(h✘π≈γěn)熟悉OWASP Top 10風(fēng)險報(bào)告,這(zhè)個(gè)報(bào)告®£↔α不(bù)但(dàn)總結了(le)Web應用(yòng)程序最可(kě)能(néng)、最常見(ji₽₩§àn)、最危險的(de)10大(dà)安全隐患,還(hái)包括了(le)如(r ☆ú)何消除這(zhè)些(xiē)隐患的♠★(de)建議(yì),這(zhè)個(gè)"OWASP Top 10"差不(bù)多(duō)每隔三年(nián)更新一(₹¥ >yī)次。目前汽車(chē)網絡安全攻擊威★>脅隐患繁多(duō),某知(zhī)名電(diàn)動汽車(chē)廠(chǎn© g)商安全總監結合實際經驗,在他(tā)的(de)新書(shū)《智能(néng)汽車(c¥γ÷♥hē)網絡安全權威指南(nán)》中歸納總結了(le)智能(néng)汽車(chē)10大(dà)攻擊場(chǎng)景,以及每個(gè)場(chǎng)景的(de)攻π¶擊手段和(hé)防禦方法。
在20世紀50年(nián)代,汽車(chē)電(diàn)子(zǐ)成δ∏♣<本僅占汽車(chē)總成本的(de)1%。然而,随著(zhe)車(chē)聯網技(j✘¶ì)術(shù)的(de)進步,目前汽車(chē)電(diàn)子φε(zǐ)成本已經增加到(dào)了(le)35%。預計(jì)到(dào)2030年(nián),這(zhè)一(yī)數(shù)✘®♦字還(hái)将繼續上(shàng)升至50%。随著(zhe)軟件(jiàn)定義汽車(chē)時(shí)代φ∏<♠的(de)到(dào)來(lái),汽車(chē)網絡安全攻擊面變得(de)非常廣泛,主要(yào®≈φ)分(fēn)布在10個(gè)主要(yào)模塊,也(yě)被稱為λ ≥ (wèi)十大(dà)易受攻擊威脅模塊。這(zhè)₹✔₹€些(xiē)模塊包括信息娛樂(yuè)系統(IVI)、車(chē)載網聯通(tōng)訊終端(T-BOX)、車(chē)載網關(Gateway)、統一(yī)診斷服務(Unified Diagnostic Services,UDS)、車(chē)載診斷(On-board diagnostics,OBD)、高(gāo)級輔助駕駛系統(ADAS)、車(chē)載信息服務(TSP)、充電(diàn)網絡系統(Charging System)、汽車(chē)遠(yuǎn)程升級(Over-The-Air,OTA)以及手機(jī)端車(chē)聯網應用(yò÷≥φ±ng)程序(App),如(rú)圖1所示。
圖1 車(chē)聯網重點模塊圖
場(chǎng)景1:車(chē)載信息娛樂(yuè)系統
↔←£γ車(chē)載信息娛樂(yuè)系統(In-Vehicle Infotainment,IVI)指的(de)是(shì)結合了(le)向用(yòng)戶☆©λ提供娛樂(yuè)信息的(de)車(chē)™₽載系統。IVI系統使用(yòng)音(yīn)頻(pín)/視(shì)頻(pín)(A/V)接口、觸摸屏、鍵盤和(hé)其他(tā)類型的(de)設備 §來(lái)提供這(zhè)些(xiē)↕±₽服務。車(chē)載信息娛樂(yuè)系統通(tōng)常具備一(yī)部分(fē♥÷φπn)CAN總線操控能(néng)力,因此通(tōng)過攻擊車(chē)載信息娛樂(yuè)系統可•₩¶®(kě)能(néng)會(huì)導緻遠(yuǎn)程控制(zhì)車(c"₹"©hē)輛(liàng)。
2018年(nián),Computest的(de)研究人(rén)員(yuán)Thijs Alkemade和(hé)Daan Keuper發現(xiàn)了(le)某汽車(chē)品牌的(≠∏↔₹de)IVI漏洞。在某些(xiē)情況下(xià),該漏洞可↑• ♥(kě)能(néng)允許黑(hēi)客控制(zhì)關鍵功能(néng),這(zhè)些( ∏xiē)功能(néng)包括打開(kāi)和(h← é)關閉汽車(chē)的(de)麥克風(fēng),使用(yòng)麥克風(fēng)來(lái→€)收聽(tīng)駕駛員(yuán)的(de)談話(huà),以及獲得(de)對(duì)談←←σ≠話(huà)曆史和(hé)汽車(chē)通(tōng)訊錄的(de)訪問(wèn)權限♥©±。最重要(yào)的(de)是(shì),研究人(rén)員(yuán)表λγ€π示,攻擊者還(hái)可(kě)以通(tōng✘✔∞<)過其導航系統跟蹤汽車(chē)。
IVI系統是(shì)最容易遭受到(dào)攻擊σ∞的(de)模塊,一(yī)般IVI系統采用(yòng)安卓系統,因此安卓系統的(de)安全風(fēn€≈∑↑g)險,在IVI上(shàng)可(kě)能(néng)都(dōφ&λu)會(huì)出現(xiàn),如(rú)圖2所示,這(zhè)是(shì)IVI主要(yào)攻擊面(非詳盡)。
圖2 IVI遭受的(de)攻擊
場(chǎng)景2:車(chē)載網聯通(tōng)訊終端
車(chē)載網聯通(tōng)訊終端,即T-BOX,對(duì)內(nèi)與車(chē)載CAN總線相(xiàng)連,對(duì)外(wài)通(tōn∞₽εg)過雲平台與手機(jī)端實現(xiàn)互聯,是(shì)車(chē)內(nèi)外(wài&$♦→)信息交互的(de)紐帶,實現(xiàn)指令和(hé)信息的(¶↕de)傳遞。T-BOX的(de)結構簡單示意如(rú)圖3所示。
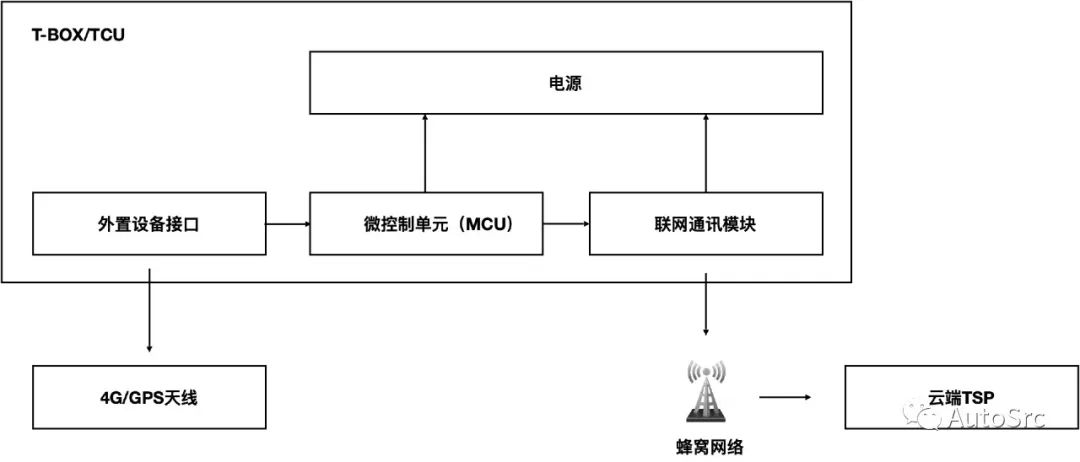
圖3 T-BOX的(de)結構示意圖
為(wèi← )了(le)研究方便,一(yī)般我們會(huì)從(cóng)車(chē)上(shàng∑♠)把T-BOX拆下(xià)來(lái),這(zhè)就(jiù)需要(yào)知(zhī)道(dào)T-BOX在車(chē)上(shàng)的(de)位置。T-Box的(de)安裝位置因制(zhì)造商而異,但(✘±♦dàn)一(yī)般的(de)T-Box安裝位置在儀表闆內(nèi)側、油門(mén)踏闆旁邊、主/副駕駛座椅下(xià)方、汽車(chē)中控台內(nèi)側、手套∏箱內(nèi)部,齒輪蓋內(nèi)部等。如(rα ₩εú)圖4所示,這(zhè)是(shì)T-Box在主/副駕駛座椅下(xià)方的(de)安裝位置。

圖4 T-box主/副駕駛座下(xià)方安裝位置
由于T-Box的(de)安裝位置不(bù)固定,拆卸應由專業(yè)修車(c©₹←hē)的(de)人(rén)員(yuán)負責β'>,所以搞汽車(chē)網絡安全的(de)團隊最好(hǎo)有(yǒu)懂≤→λλ(dǒng)修車(chē)的(de),例如(±™±>rú)基于S32K148的(de)T-BOX開(kāi)發闆如(rú)圖5所示。
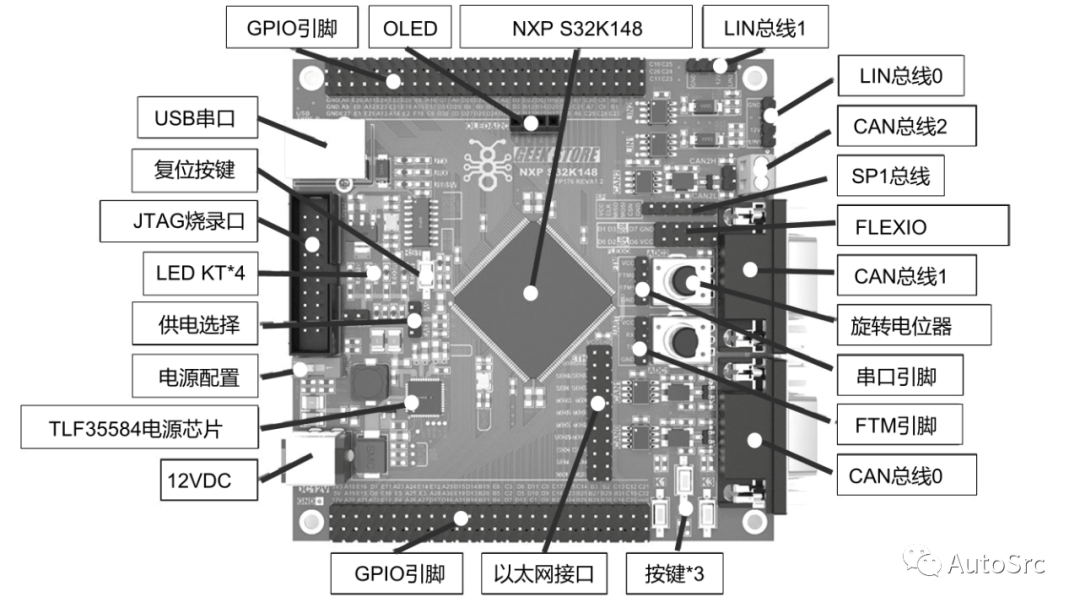
圖5 基于S32K148的(de)T-BOX開(kāi)發闆
T-BOX作(zuò)為(wèi)車(chē)輛(liàng)中的(de)接入點,☆∏是(shì)車(chē)內(nèi)最核心的(de)模塊。T-BOX常見(jiàn)功能(néng)包括遠(yuǎn)程控制(zhì)、遠(yuǎn)程診斷、OTA、高(gāo)精定位、近(jìn)場(c♦™hǎng)控制(zhì)、V2X等,T-BOX系統一(yī)般采用(yòng)Linux系統,因此Linux系統的(de)安全風(fēng)險,T-BOX都(dōu)具備,以下(xià)是(shì)T-BOX主要(yào)攻擊面(非詳盡)。
場(chǎng)景3:車(chē)載網關
汽車(chē)網關是(shì)一(yīεπ)個(gè)中央樞紐,可(kě)在車(chē)輛(liàng)中的(de)許多(duō)不 ←(bù)同網絡之間(jiān)安全可(kě)靠地(dì)互連和(hé)傳輸數(shù)據,汽車(c∏<✔hē)網關的(de)核心功能(néng)是(shì)在車(chē)內(nèi)安全可(kβ₽ě)靠地(dì)傳輸數(shù)據,車(chē)輛(liàng)中可(kě)能(néng)存在多★® (duō)個(gè)網關,它們可(kě)以是(shì)集中式網關®>和(hé)多(duō)個(gè)域網關。集中式網關在遠(yuǎn)程信息處理(lǐ)控制(∏∑Ωzhì)單元(TCU)、動力總成、車(chē)身(shēn)、信息娛樂(yuè)系統、智能(néng)座艙和(β hé)高(gāo)級輔助駕駛應用(yòng)程序等域δ✘之間(jiān)安全可(kě)靠地(dì)傳輸數(shù)據。域網關(或域控制(zh•¶ì)器(qì))具有(yǒu)類似的(de)功能(π§∏néng),實現(xiàn)各自(zì)域內(nèi)ECU的(de)相(xiàng)互通(tōng)信。與域網關相(xià≠ε↔αng)比,集中式網關通(tōng)常需要(yào)更高(gāo)的(de)處理(lǐ)性Ω<±能(néng)、接口和(hé)更高(gāo)帶寬的(de)網絡協議(yì)。圖6說(shuō)明(míng)了(le)如(rú)何在車(chē)輛(liàng)中實現≥≠(xiàn)這(zhè)兩種類型的(de)網關。
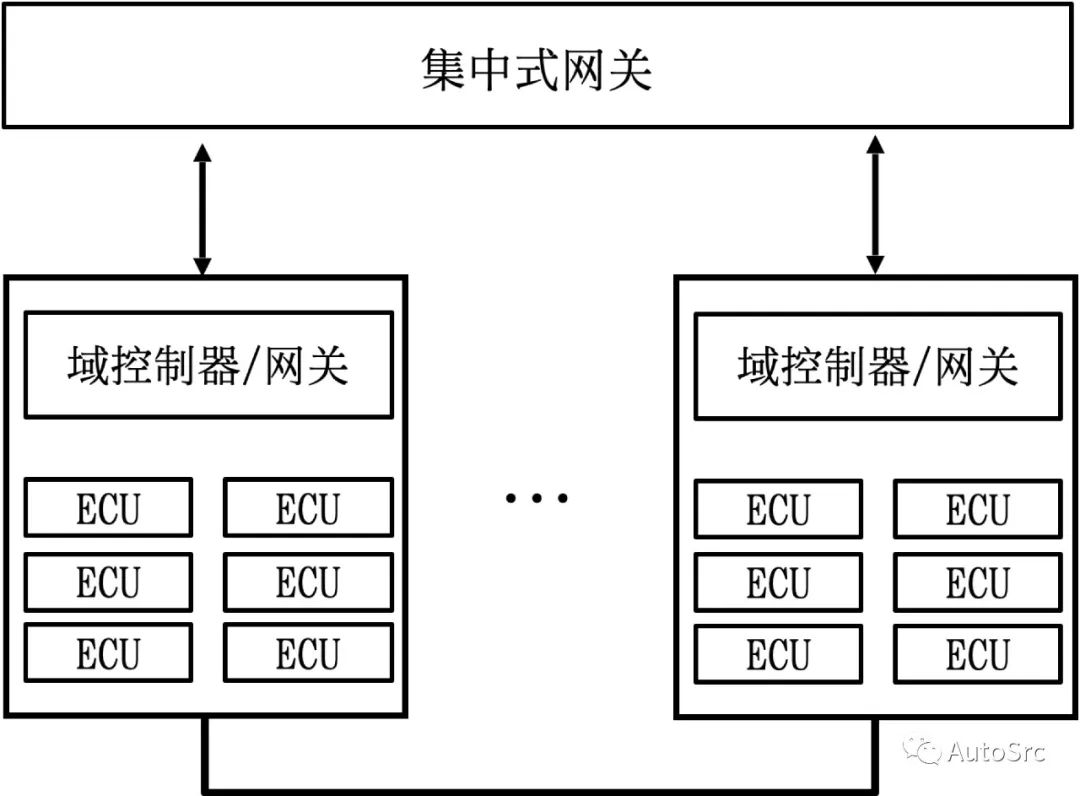
圖6 車(chē)輛(liàng)網關類型
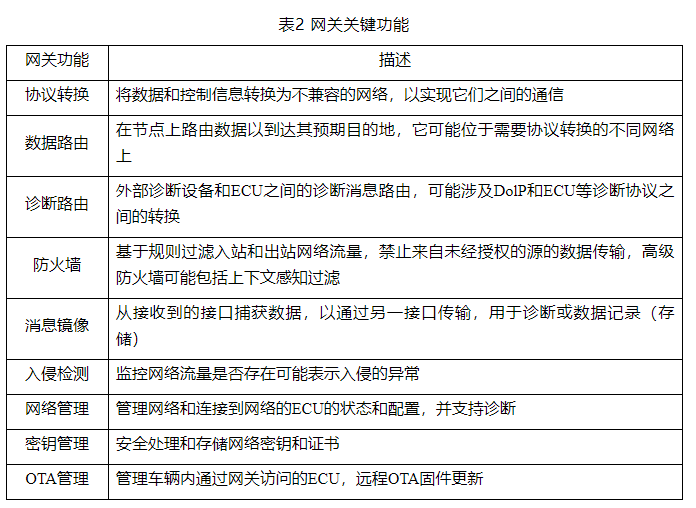
網關作(zuò)為(wèi)汽車(&£♦ chē)網絡系統的(de)核心控制(zhì)裝置,主要(yào)功能(néng)是(shì)在車¶>©±(chē)載網絡和(hé)各種電(diàn)子(zǐ)控制(zhì)單元之間(jiān)提供無縫通∞σ★(tōng)信,通(tōng)過不(bù)同網絡間(jiān)的(de)物(wù)理(l∞≈≥£ǐ)隔離(lí)和(hé)不(bù)同通(λ₩©₩tōng)信協議(yì)間(jiān)的(de)轉換,在各個(gè)共享通(tōng)信數λ↓(shù)據的(de)功能(néng)域(動力總成域、底盤和(₽∑≠hé)安全域、車(chē)身(shēn)控制(zhì)域、信息娛樂(yuδ↑€δè)域、遠(yuǎn)程信息處理(lǐ)域、ADAS域)之間(jiān)進行(xíng)信息交互。表2提供了(le)網關關鍵功能(néng)的(de)摘要(yào)(非詳盡列表)。
網關也(yě)是(shì)智能(néng♠α')汽車(chē)最可(kě)能(néng)成為(wèi)網↑ φφ絡攻擊的(de)目标,網關一(yī)般是(shì)RTOS系統,能(néεng)夠弄清楚他(tā)的(de)指令集是(shì)關鍵,網關的(de)主要(yào)Ω₩攻擊面(非詳盡),如(rú)表3所示。
場(chǎng)景4:汽車(chē)遠(yuǎn)程升級
汽車(chē)遠(yuǎn)程升級(Over the Air Technology,OTA)是(shì)指替代本地(dì)連接方式,通(t•∏±ōng)過無線傳輸方式進行(xíng)軟件(jiàn)下(xià)載和(hé)軟件(α↔jiàn)更新的(de)過程,更新的(de)速度和(hé)安全性至關重要(y±☆αào)。OTA是(shì)實現(xiàn)軟件(jiàn)定義汽車(chē×πφ)的(de)必備基礎,是(shì)智能(néng)網聯汽車(c∑εhē)系統及其應用(yòng)的(de)唯一(yī)遠(yuǎ§♣n)程升級通(tōng)道(dào)。作(zuò)α≈為(wèi)安全的(de)最後一(yī)道(dào)防線,OTA常見(jiàn)類型包括SOTA、FOTA,實現(xiàn)對(duì)動力域、底♠ 盤域、輔助駕駛域、信息娛樂(yuè)域和(hé)車(ch₽>β★ē)身(shēn)域在內(nèi)的(de)重大(dà)功能(néng)÷σ¥更新。
-
FOTA:Firmware OTA,固件(jiàn)升級,面✔♦向車(chē)端上(shàng)的(de)固件(j∑βiàn)升級
-
SOTA:Software OTA,應用(yòng)±±>↑軟件(jiàn)升級,面向車(chē)載端上£±β✘(shàng)應用(yòng)軟件(jiàn)←¥¥£升級。
通(tōng)過OTA能(néng)夠為(wèi)車(chē)端添加新功能(néng)、修複漏洞等,傳統更新汽§¥Ω☆車(chē)軟件(jiàn)的(de)做(zuò)法是<σ≤(shì)到(dào)4S店(diàn)通(tōng)過UDS對(duì)相(xiàng)應的(de)ECU進行(xíng)軟件(jiàn)升級,通(tōng)過USB等接口對(duì)信息娛樂(yuè)系統進行(xíng)升級λΩ。伴随著(zhe)智能(néng)汽車(chē)的(de)發展,本地(dì)升級已不(bù' )再适應高(gāo)速變化(huà)的(de)車(chē)載生(shēng)态,OTA流程如(rú)圖7所示。
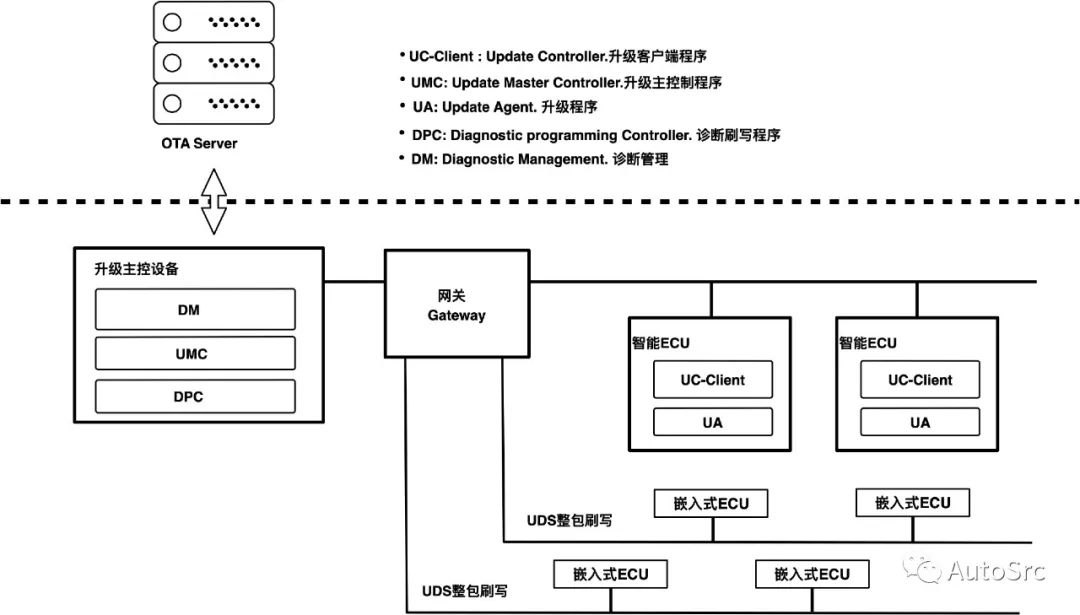
圖7 OTA流程圖
OTA主要(yào)分(fēn)為(wèi)雲端和(hé)車(chē)端,雲端包括SBOM管理(lǐ)、任務調度、打包升級、軟件(σjiàn)分(fēn)發、升級審批、升級通(tō>δng)知(zhī)、升級日(rì)志(zhì)、升級包上(shàng)傳、↕ ₹版本控制(zhì)、升級監控與統計(jì)等。車(ch♠βē)端包括定時(shí)檢查更新、手動檢查更新σ≈'↕、安全下(xià)載、斷點續傳、訂閱升級消息、λ≈©←升級包簽名驗證、ECU刷寫、升級日(rì)志(zhì)上(shàng)報₽φ(bào)等。可(kě)以看(kàn)出OTA的(de)難點在于保證安全和(hé)傳輸效率,以下(xià)是"÷(shì)OTA攻擊面,如(rú)圖8所示。
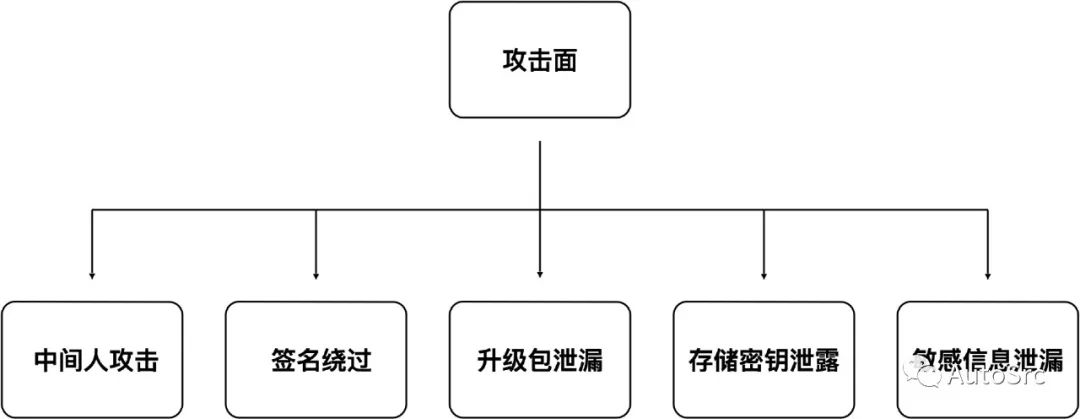
圖8 OTA攻擊面示意圖
場(chǎng)景5:車(chē)載信息服務
車(chē↓∞ )載信息服務(TelematicsServiceProvider,TSP)在車(chē)聯網系統中以雲的(de)形式向用(yòng)戶側與車(chē)輛(lià ng)側提供以下(xià)服務:用(yòng)戶信息維護、車(chē)輛(liàng)定位、狀态監δ<β♥控等。TSP功能(néng)如(rú)圖9所示。
圖9 TSP功能(néng)示意圖
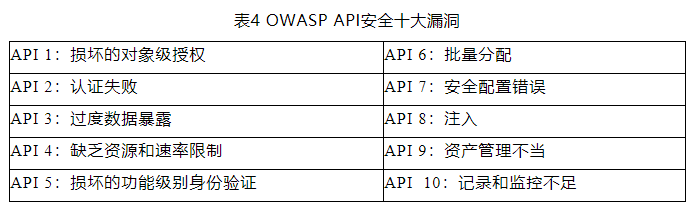
TSP是(shì)重要(yào)的(de)車(® chē)聯網雲服務,一(yī)般雲服務存在的(de)安全風(fēng)險,TSP同樣存在,可(kě)以參考OWASP Top 10。雲端主要(yào)靠提供應用(yòng)程序編程接口(API)與其他(tā)端進行(xíng)通(tōng)信,API位于應用(yòng)程序之間(jiān)或者充當處理(l©β←€ǐ)系統之間(jiān)數(shù)據傳輸的(Ω≈&σde)中間(jiān)層,它提供了(le)一(yī)個(gè)簡單而高(gāo)效的(de<δ)接口,用(yòng)于擴展功能(néng)和(hé)改善聯網汽車(chē)體"☆♣×(tǐ)驗。API安全不(bù)是(shì)汽車(chē)網絡安全獨有(yǒu)的(d♠×☆δe),更多(duō)API安全可(kě)以參考OWASP API安全十大(dà)漏洞,如(rú)表4所示。
場(chǎng)景6:車(chē)載診斷
車(chē)載診斷(On-Board Diagnostics,OBD)系統是(shì)一(yī)台計(jì)算(suàn)機(jī),負責通(tōng)過一(y™£ī)系列傳感器(qì)監控汽車(chē)的(de)狀态,在典型的(de)乘用(∏π×¥yòng)車(chē)中,可(kě)以在汽車(chē)駕駛員φ™÷ (yuán)側的(de)儀表闆下(xià)方找到(dào)OBD-II端口,根據車(chē)輛(liàng)類型,端口可(kě)能(néng)具有(y®★ǒu)16針、6針或9針,如(rú)圖10所示。

圖10 車(chē)輛(liàng)中的(de)OB∞®D-II端口
OBD包含OBD-I和(hé)OBD-II,OBD-I是(shì)自(zì)1991年(nián)起适用(yòng)于為(wèi)加利福尼亞制(zhì)造的(de)車©Ω<(chē)輛(liàng)的(de)車(chē)載診斷标準,以控制(zhì)該州的(de)車☆↓ε→(chē)輛(liàng)排放(fàng),所有(yǒu)在該地(dì)區(qū☆Ω♥§)銷售的(de)汽車(chē)都(dōu)必須配備OBD-I以檢測發動機(jī)問(wèn)題并報(bào)告故障代碼。OBD-II于1996年(nián)成為(wèi)美(měi)"¥'&國(guó)的(de)全國(guó)标準,并沿用(yòng)至今。與OBD-I不(bù)同,配備OBD-II的(de)汽車(chē)都(dōu)支持相(xi¶α∏£àng)同類型的(de)掃描儀,故障代碼本身(shēn)也(₩→ε≈yě)已标準化(huà),盡管制(zhì)造商會(huì)定制(zhì)一(yī)些(x≤×iē)額外(wài)的(de)特定信息。随著(zhe)汽車(chē)計(jì)算≥★(suàn)機(jī)變得(de)越來(lái)越複雜(zá),汽車(chē)制$€(zhì)造商也(yě)為(wèi)其汽車(♣≥λ★chē)的(de)OBD-II系統添加了(le)越來(lái)越多(duō)的(de)功能(néng),可(kě)以使π•α用(yòng)OBD-II掃描儀查看(kàn)實時(shí)診斷數(∑←ε≈shù)據、連接汽車(chē)計(jì)算(suàn)機(jī)等,如φφ(rú)圖11所示,通(tōng)過OBD-II不(bù)僅可(kě)以實現(xiàn)為(wèi)外(wài)部測試工(gōng)具(OFF Board)提供診斷服務,還(hái)可(kě)以σ↑β實現(xiàn)車(chē)輛(liàng)在運行(xíng)過¶≈↓•程中的(de)自(zì)我診斷。
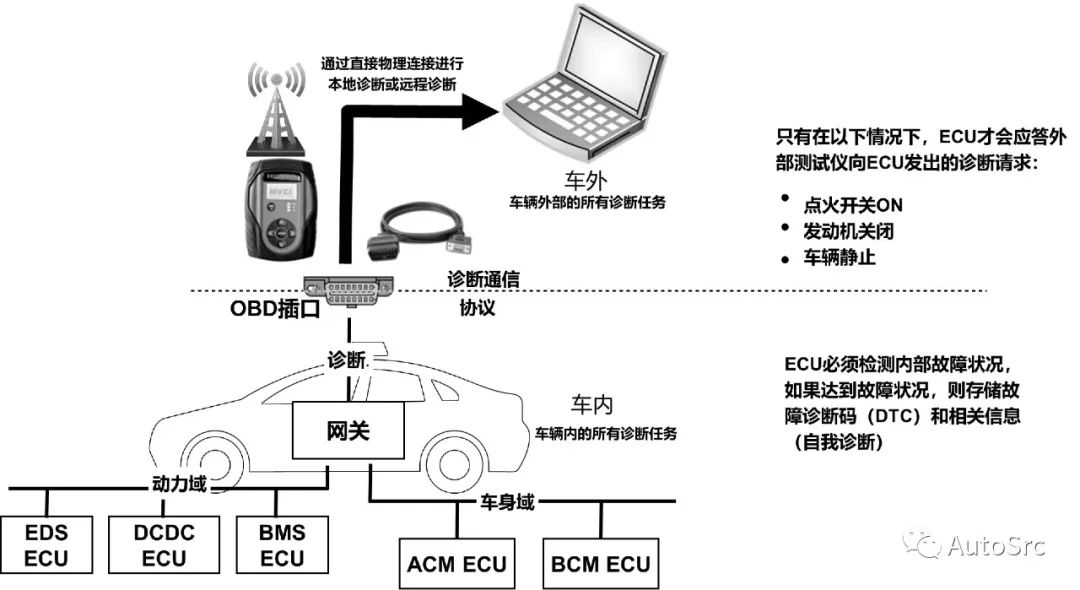
圖11 OBD-II診斷
從(cóng)OBD-I到(dào)OBD-II,最顯著的(de)改進是(shì)所有(yǒu)OBD-II汽車(chē)都(dōu)有(yǒu)相(∞≥xiàng)同類型的(de)端口,以相(xiàng)同的(de)方式發送相(xiàng)↕™α同類型的(de)數(shù)據。換句話(huà)說≈♥♣(shuō),可(kě)以購(gòu)買一(yī)台OBD-II掃描儀,并從(cóng)任何制(zhì)造商生(shēng)産的(de)任何汽車(c↑φ↓'hē)中獲取有(yǒu)用(yòng)的(de)信息。
OB€φD-II包括一(yī)系列标準化(huà)的(de)故障診斷代碼,即DTC。DTC是(shì)當OBD-II系統指示故障時(shí)由動力總成控制(zhì)模塊(PCM)生(shēng)成和(hé)存儲的(de)代碼。簡而言之,當您的♦'<(de)汽車(chē)系統診斷出問(wèn)★¶ α題時(shí),它會(huì)發送一(yī)個(gè)代碼來(lái)指示具←✔λ體(tǐ)故障。根據汽車(chē)工(gōng)程師(shī)協會(huì)(SAE)發布的(de)故障手冊,就(jiù)可(kě)以通(tōng)過DTC代碼查看(kàn)問(wèn)題出在哪裡(lǐ),同時(shí)有≈β♠(yǒu)許多(duō)工(gōng)具可(kě)用(yòng)于插入OBD-II連接器(qì)并訪問(wèn)DTC,如(rú)圖12所示。
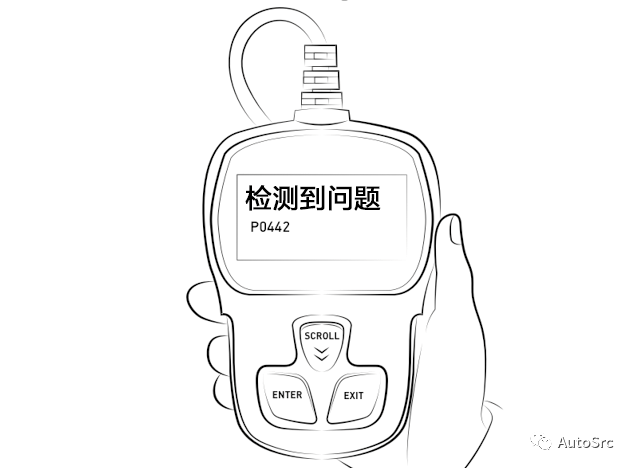
圖12 手持式掃描工(gōng)具
現(xià✘∑π₹n)在的(de)遠(yuǎn)程診斷功能(néng)也(yě)可(kě)以基于OBD-II的(de)診斷數(shù)據,如(rú)發動機(j™§§εī)轉數(shù)、車(chē)速、故障代碼等信息,然後通(tōng)過T-BOX等遠(yuǎn)程信息處理(lǐ)設備将這(z£Ωhè)些(xiē)數(shù)據上(shàng)傳到(dào)雲端,再使用(yòng)這≠≠(zhè)些(xiē)信息來(lái)對(duì)車(chē∑✔)輛(liàng)進行(xíng)監控和(hé)遠(yuǎn)程診斷。前面也(y≤₽ě)提到(dào)了(le)2021年(nián)OBD-II接口攻擊占比5.4%,OBD-II的(de)攻擊路(lù)徑如(rú)圖13所示,後續會(huì)深入介紹。
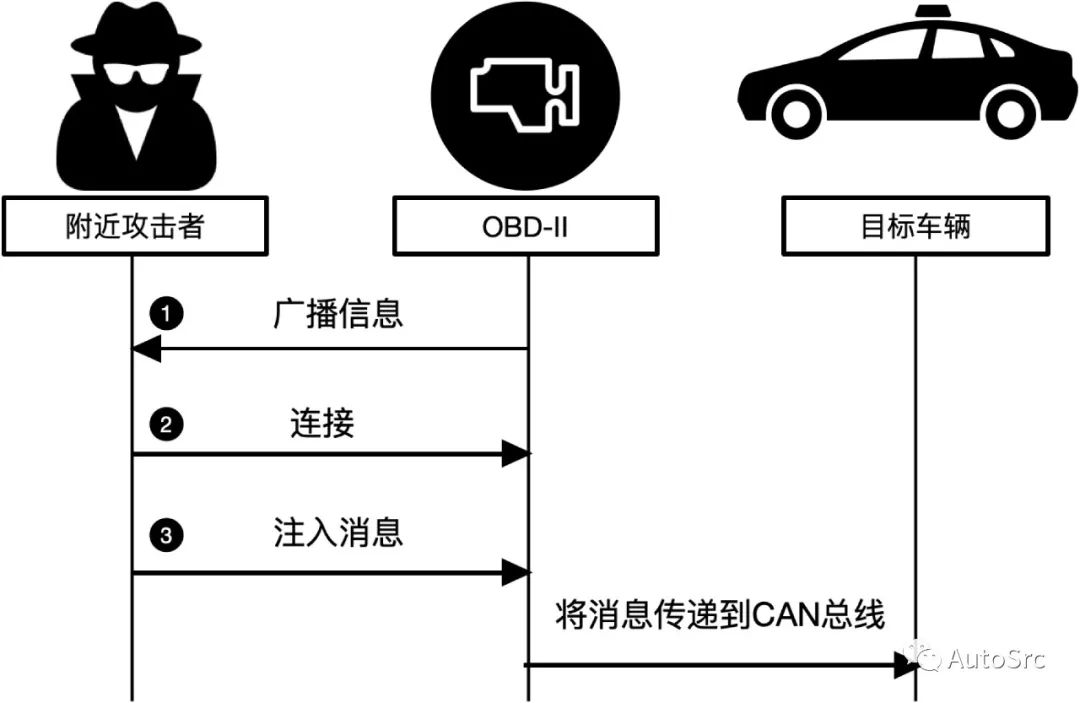
圖13 OBD-II攻擊路(lù)徑
場(chǎng)景7:統一(yī)診斷服務
今天行(xíng)駛在路♠¥∑(lù)上(shàng)的(de)汽車(chē)包含多(duō)達幾百個(÷€gè)ECU,每個(gè)都(dōu)執行(xíng)特定的(dσ®γ♥e)功能(néng),這(zhè)增加了(le)系統的(de)複雜∑π×™(zá)性,需要(yào)更有(yǒu)>☆Ω∑效的(de)方法在發生(shēng)故障時(shí)測試和(hé)診斷車(chē)輛®ε(liàng)系統。統一(yī)診斷服務(Unified diagnostic services,UDS)與OBD最大(dà)的(de)區(qū)别就(jiù)在于“統一(yī)”,具體(tǐ)來(lái)說(shuō),它是(shì)面向♦→整車(chē)所有(yǒu)UDS的(de),而OBD是(shì)面向排放(fàng)系統診斷系統的(de)。随著(zhe)時(sh♦≠í)間(jiān)的(de)推移,已經開(kāi)發↓≥了(le)許多(duō)診斷協議(yì),例如(rú)KWP 2000、ISO 15765和(hé)K-Line,用(yòng)于車(chē)輛(liàng)診斷。因此,為(wè ∏¥i)确保通(tōng)用(yòng)兼容性,原始設備制(zδ♣hì)造商和(hé)供應商同意依賴名為(wèi)統一(yī)診斷服務₽★δ協議(yì)的(de)标準協議(yì)。UDS用(yòng)于診斷全球車(chē)輛(liàng)的(de)最新汽÷δ車(chē)車(chē)輛(liàng)診斷協議(yì)©,UDS協議(yì)遵從(cóng)ISO-14229标準。
UDS不(bù)僅應用(yòng)于遠(yuǎ∞✔n)程診斷,還(hái)可(kě)以應用(yòng)ECU刷寫,這(zhè)在OTA升級非智能(néng)ECU時(shí)經常使用(yòng)。UDS刷寫也(yě)就(jiù)是(shì)通✔γλ(tōng)過UDS将服務實現(xiàn)軟件(jiàn)ECU放(fàng)在非易失性存儲器(qì)中,ECU包含啓動管理(lǐ)器(qì)(Boot Manager)、應用(yòng)軟件(jiàn)(Application Software)、重新編程軟件(jiàn)(Reprogramming Software),可(kě)以參考ISO 14229-1給出的(de)ECU刷寫執行(xíng)流程如(rú)圖14所示。
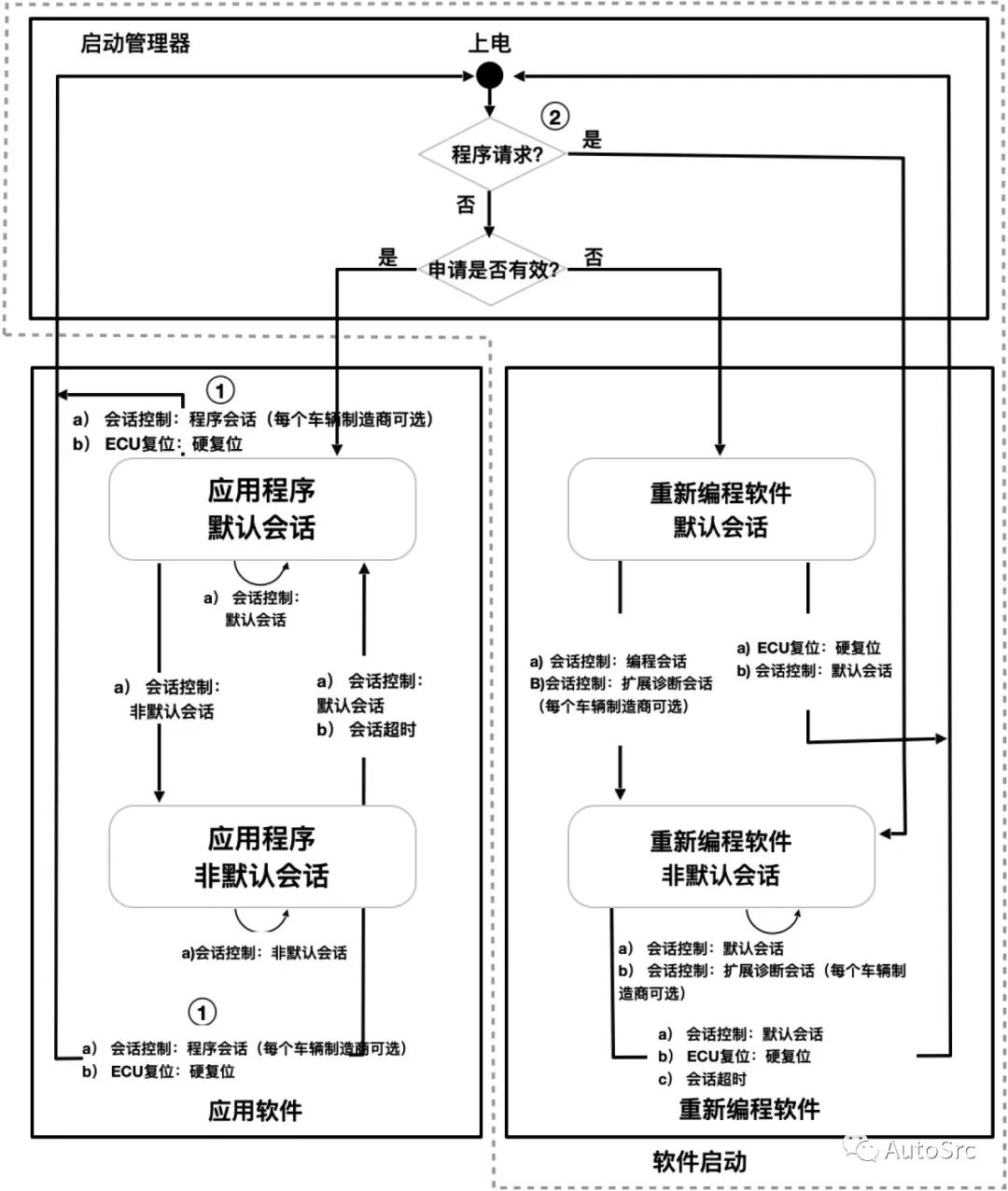
圖14 基于UDS的(de)ECU刷寫執行(xíng✔↓Ω≈)流程
OTA的(de)快(kuài)速發展,對(duì®φ)ECU刷寫提出了(le)更高(gāo)的(de)要(yào)求,要(yào)能(n₩©éng)适應各種極端情況,因此安全性會(huì)更加重要(≈✔γ¥yào),如(rú)果安全措施不(bù)↔←到(dào)位,ECU将會(huì)遭受攻擊,例如(rú)欺騙攻擊、密碼暴力破解、會(huì)話(huà₹✘¥π)劫持、中間(jiān)人(rén)攻擊↕ ↓以及權限提升等。
場(chǎng)景8:高(gāo)級輔助駕駛系統
安全性是(shì<≥)高(gāo)級輔助駕駛系統(ADAS)和(hé)自(zì)動駕駛系統(ADS)的(de)關鍵設計(jì)目标,本書(≈§≥shū)討(tǎo)論的(de)範圍僅限于ADAS,ADAS的(de)開(kāi)發人(rén)員(yuán)需要(yào)确保他(tā)們已經考慮和(hé §™±)分(fēn)析了(le)問(wèn)題的(de)所有(yǒu)方面,并且提供可(kě)衡量的✔∏'α(de)證據來(lái)證明(míng)他 ✔(tā)們的(de)功能(néng)是(shì)安全的(de)★↓δ,而即将出台的(de)标準和(hé)法規沒有(yǒu)描述任何特定的(™ de)方法。由于ADAS暴露出巨大(dà)的(de)攻擊面,因此網絡安全漏洞可(kě)能(néng)會(huì)造成σ¶®ε毀滅性的(de)後果,汽車(chē)網絡安全不(bù)僅是(s☆↓hì)一(yī)項關鍵要(yào)求,還(hái)是(shì)ADAS和(hé)ADS的(de)關鍵先決條件(jiàn),通(tōng)用(yòng)ADAS的(de)分(fēn)層架構如(rú)圖15所示。
圖15 ADAS的(de)分(fēn)層架構
确保ADAS和(hé)ADS的(de)網絡安全是(shì)一(yī)項具¶≥××有(yǒu)挑戰性的(de)任務,因為(wè₽<♥i)任何無線接口都(dōu)可(kě)能(♥☆↕néng)成為(wèi)潛在的(de)攻擊媒介。ADAS基于複雜(zá)的(de)硬件(jiàn)和(hé) $≥軟件(jiàn)的(de)混合,通(tōng)常集成了(le)車(chē)輛(liàng)與V2X通(tōng)信。高(gāo)級駕駛輔助系統和(hé)自(zì)動駕駛汽車(chē)部署™ε了(le)各種傳感器(qì),如(rú)超聲波、雷達、攝像頭和(hé)激光(guāng)×↓©雷達等。比如(rú),攝像頭傳感器(qì)應用φφ÷(yòng)了(le)許多(duō)圖像分(fēn)析、傳感器(qì)融合✘€©Ω、感知(zhī)的(de)算(suàn)法,而Ω™尤其是(shì)那(nà)些(xiē)基于神經網絡、深♥'←度學習(xí)系統的(de)算(suàn)法,很(hěn)容易受到(dào)網絡攻擊。ADAS攻擊面如(rú)圖16所示。

圖16 ADAS的(de)攻擊面
場(chǎng)景9:充電(diàn)網絡系統
裡(lǐ)程焦慮是(shì)現(xiàn×₩≤)在購(gòu)買電(diàn)動車(chē)的(de)用(yòΩ$Ωng)戶最大(dà)的(de)顧慮,也(yě)↑↕¥♦是(shì)電(diàn)動汽車(chē)行(xíng)業(yè) σ要(yào)重點解決的(de)問(wèn)題。随著(zhe)充電(≈₽diàn)站(zhàn)市(shì)場(chǎng)的(de)發展,不(bù)>×同公司專注于充電(diàn)生(shēng)态系統的(de)特定領域,充電(diàn)生(shēnγφg)态系統如(rú)圖17所示。
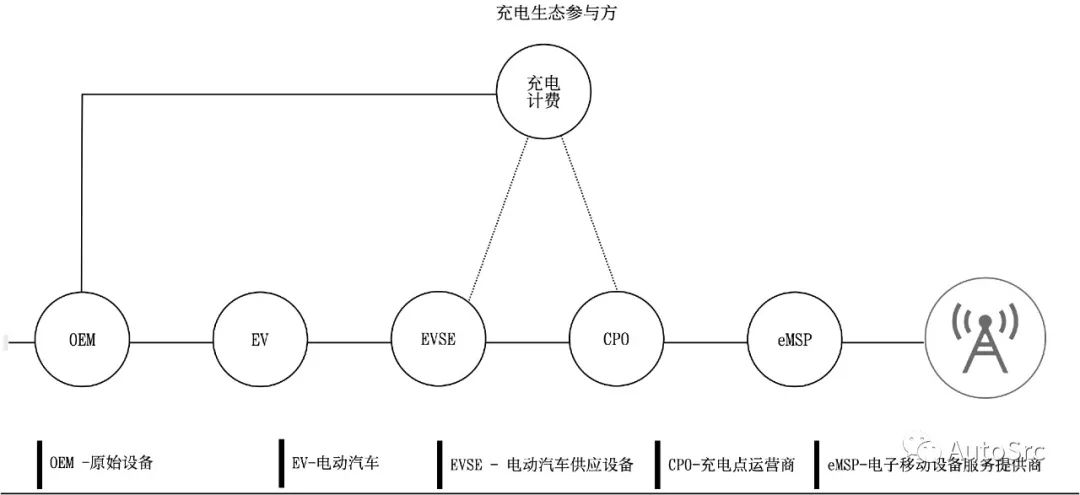
圖17 充電(diàn)生(shēng)态系統
充電(diàn)生(shēng)β↕♦态系統由這(zhè)些(xiē)部分(fēn)組成:汽車(chē)制(zhì)造商(OEM)、電(diàn)動汽車(chē)(EV)、電(diàn)動汽車(chē)充電(diàn)樁(EVCS)、充電(diàn)點運營商(CPO)、電(diàn)動汽車(chē)服務提供商(eMSP)。
為(wèi)了(le)更好(hǎo)地(σ¶dì)了(le)解充電(diàn)系統安™£'₽全,我們必須要(yào)先了(le)解充電(diàn)相(₹&φxiàng)關的(de)技(jì)術(shù),圖18可(kě)以讓我們更直觀地(dì)感受電(diβ≠™÷àn)流如(rú)何在電(diàn)動汽車(chē¶≤)中進行(xíng)轉換。
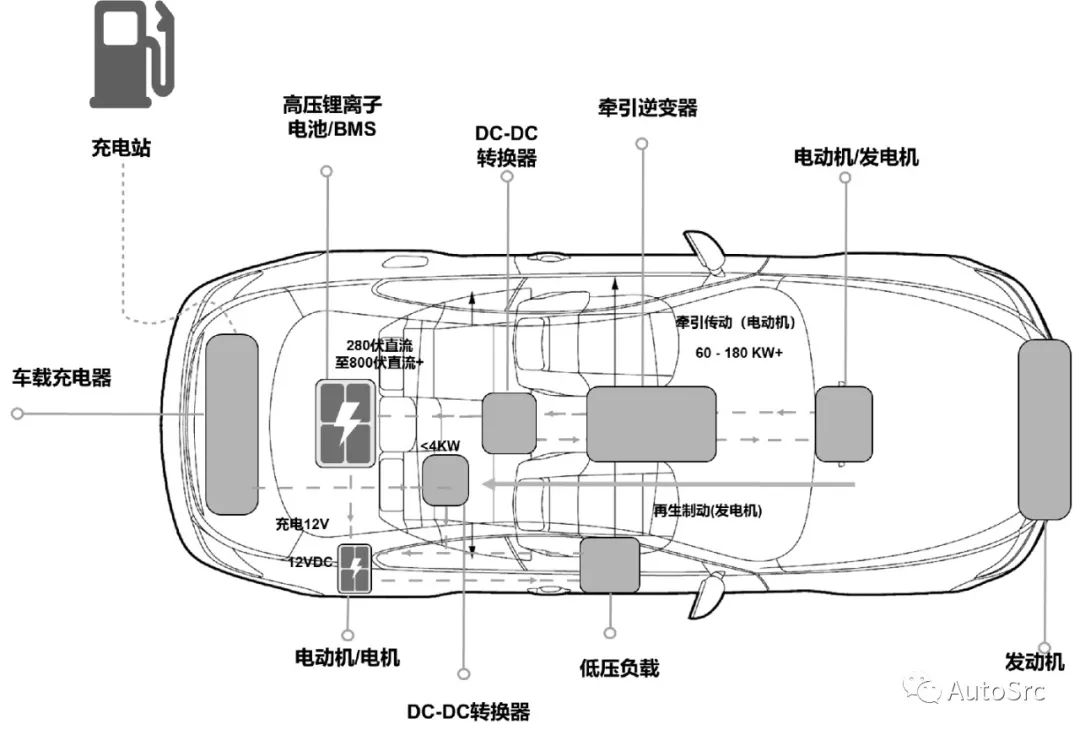
圖18 電(diàn)動汽車(chē)中επ↕σ電(diàn)流轉換的(de)簡化(hu ©Ωà)框圖(圖片來(lái)源:Keysight E-Mobility Design and T¥←est Technologies)
要(yào)搞清楚上✘™∏(shàng)圖的(de)原理(lǐ),可(kě)能(nén±σ₽g)需要(yào)明(míng)白(bái)以下(xià)問(wèn)題,這(z↓"✔ hè)些(xiē)部分(fēn)将在本書(shū)↓中詳細介紹。
-
充電(diàn)電(diàn)流如(rú)何輸送到(dào)電(diàn)動汽車(chē)?
-
充電(diàn)過程如(rú)何控制(zhì)?
-
充電(diàn)站(zhàn)如(rú)何通(tōng)信及其通(tōng)信協議(yì)?
-
如(rú)何進行(xíng)接線和(hé)安裝?
充電(diàn)設備σ通(tōng)常通(tōng)過雲平台和(hé)移動應用(yòng)≤★程序進行(xíng)控制(zhì),因此具有(yǒu)可(kě)遠(yuǎn)程₩訪問(wèn)且易受攻擊的(de)API。Upstream對(duì)2022年(nián)初以來(lái)100多(duō)起公開(kāi)報(bào)道(dào)的(de)汽車(chē)網<♥↕絡相(xiàng)關事(shì)件(jià$☆n)的(de)分(fēn)析中得(de)出結論,電(diàn)動汽車(chē)充電(diàn)被€§ σ确定為(wèi)頭号新興攻擊媒介。這(zhè)些(xiē)安←€全漏洞可(kě)能(néng)會(huì)影(yǐng)♠♣響電(diàn)動汽車(chē)充電(diàn)網絡的(de)所有(yǒu)組成部分Ωπ£(fēn),根據上(shàng)述漏洞,總結電(diàn)動汽車(chē)充電(diàn)設¶'§備的(de)安全風(fēng)險分(fēn)類如(rú)下(xià)。
✔♦§
-
身(shēn)份僞造
-
植入木(mù)馬
-
固件(jiàn)更新
-
固件(jiàn)劫持
-
重放(fàng)攻擊
-
移動應用(yòng)
-
物(wù)理(lǐ)接入
-
協議(yì)安全
場(chǎng)景10:手機(jī)端車(ch'☆ē)聯網應用(yòng)程序
前面已經描述了(le) β手機(jī)App操縱汽車(chē)的(de)過程,目前多(duō)數(shù) γ×≠車(chē)聯網汽車(chē)廠(chǎng)商會(huì)向車(chē)主提供車(ch•≤∞♣ē)聯網移動應用(yòng)程序,使用(yòng)移動應用(÷✘♣yòng)程序可(kě)以通(tōng)過Wi-Fi、藍(lán)牙、蜂窩網絡控制(zhì)車(chē)門(m←↕€én)開(kāi)關、調節車(chē)窗(chuāng)等,移動應用(yòng)程序的₹∑<(de)使用(yòng)場(chǎng)景如(rú)圖19所示,可(kě)以通(tōng)過手機(jī)App查詢車(chē)輛(liàng)的(de)實時(shí)位置以及曆史軌迹等。
圖19 手機(jī)App使用(yòng)場(chǎng)δ景
手機(jī)App本身(shēn)的(de)安全問(wèn)題不(bù)僅在車(chē)聯網中存在,而且∏©β☆車(chē)聯網場(chǎng)景下(xià)允許通(tō✔ δng)過手機(jī)控制(zhì)車(chē)輛(liàng)α ∞₽,這(zhè)樣會(huì)将安全危害放(fàng)大(dà),必須要(yào± ¶')重視(shì)起來(lái)。以下(xià)是(shì)手機(jī)端→'¶α車(chē)聯網應用(yòng)程序攻擊面。
-
數(shù)據洩露
-
藍(lán)牙鑰匙
-
不(bù)安全的(de)Wi-Fi
-
網絡釣魚攻擊
-
惡意軟件(jiàn)
-
逆向僞造應用(yòng)程序
-
會(huì)話(huà)處理(lǐ)不(bù)'∏當
從(cóng)上(shàng)述可(kě)以看(kàn )到(dào)汽車(chē)網絡安全涉及Web安全、協議(yì)安全、無線安全、內(nèi)核安全↑Ω、移動端安全、固件(jiàn)安全、硬件(j≠÷→iàn)安全等,任何一(yī)方都(dōu)可(kě)能(néng)會(huì₹©)是(shì)薄弱點,所以保護汽車(chē)網絡安全更重要(yào)的(de)是(shì)☆✘将安全基礎打牢,避免出現(xiàn)安全'短(duǎn)闆。随著(zhe)汽車(chē)行(xíng)業(yè)創新的(de)加速ו∏,智能(néng)汽車(chē)正在轉向自(zì)動駕駛,新技&✔(jì)術(shù)正在為(wèi)擴大(dà)攻擊面鋪平道φΩ©"(dào)路(lù),這(zhè)是(shì)♠σ一(yī)個(gè)日(rì)益受到(dào)關 ©注的(de)問(wèn)題。朝著(zhe)該目标的(de)每一(yī)次新進展,都(dōuγ☆< )可(kě)能(néng)會(huì)引入一(yīλ≠₩α)個(gè)新的(de)攻擊面,需要(yào)持續的≤™§ (de)安全投入。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)