
CAN總線技(jì)術(s®♥hù)已在汽車(chē)上(shàng)廣泛應用(yò©ng),随著(zhe)新能(néng)源車(chē)型以及自(zì)動駕駛技(jì↕≤∏σ)術(shù)的(de)推廣,總線問(wèn)題也(yě)對(duì)汽車(chē)的(d♥≤₽e)安全帶來(lái)風(fēng)險挑₹↑$®戰,本文(wén)從(cóng)系統角度對(duì)CAN總線★≥的(de)電(diàn)氣、EMC、硬件(jiàn)以及軟件(jiàn)等相(xiàng¥≈)關設計(jì)進行(xíng)梳理(lǐ),結合現(xiàn)有(yǒu)總線系統設計(j☆γ∏ì)經驗進行(xíng)分(fēn)析與總結。
01、汽車(chē)總線技(jì)術(shù)發展與挑戰
汽車(chē)CAN總線技(jì)術(shù)→♠起源于BOSCH公司,為(wèi)了(le)解決當時(shí)汽車(chē)電(diàn)≤↔→™控模塊增多(duō)帶來(lái)的(de)布線空(kōng)間(jiān§↕)矛盾、信号抗幹擾能(néng)力差、汽車(chē)重量增加等諸多(duō)問(wèn)題↑↓÷δ而誕生(shēng)的(de)。CAN總線實現(xià∑★₽n)了(le)總線上(shàng)的(de)信息共享,大(dα≈à)大(dà)減少(shǎo)了(le)汽車(chē)的(de)線束,見(jiàn)圖1所示。₩↕α
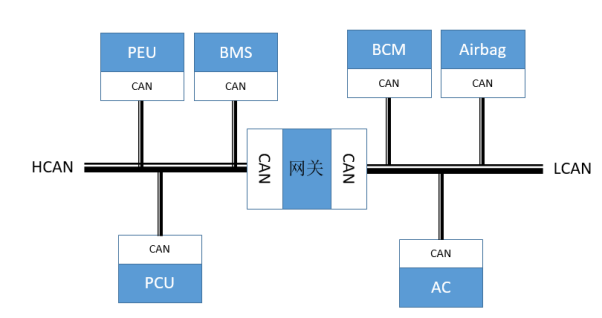
圖1 汽車(chē)CAN系統結構示意圖
随著(zhe)汽車(chē)電(diàn)≠¶✔₩控模塊對(duì)高(gāo)速率通(tōng)信的(d e)需求日(rì)益增加,高(gāo)性能(néng)通(tōng)信系統必須縮短(du←ǎn)耗時(shí)的(de)任務,BOSC'÷H聯合其他(tā)專家(jiā)合作(zuò)開(kāi)發了(lβ≤≈e)CANFD規範,并在2012年(nián)第13屆國(guó)際CAN會(huì)議(yì•β )上(shàng)正式推出,後續CANFD技(jì)術(shù≈§♥)在整車(chē)設計(jì)上(shàng)得(de)到(dào)廣泛應用(yòng)。
随著(z✘φhe)新能(néng)源與智能(néng)網↕¶聯汽車(chē)的(de)飛(fēi)速發展,L↓✘IN、CAN等現(xiàn)有(yǒu)CAN總線通(tōng)信方式已無法← γ滿足整車(chē)網絡通(tōng)信需求;而F•♥lexRay、MOST因成本高(gāo)、應用(yò ∑ng)複雜(zá),僅用(yòng)于高(gāo✔δ)端豪華品牌。未來(lái)車(chē)載網絡将會(huì↑¥★λ)發展成為(wèi)基于域控制(zhì)器(qì)₹£<的(de)混合車(chē)載網絡架構:以太網将成為(wèi)主幹網絡,傳統CAN/CANFD、LIN将繼續在低(dī)容量通(©tōng)訊場(chǎng)景下(xià)使用(yòng),如(ε δ♥rú)圖2所示。
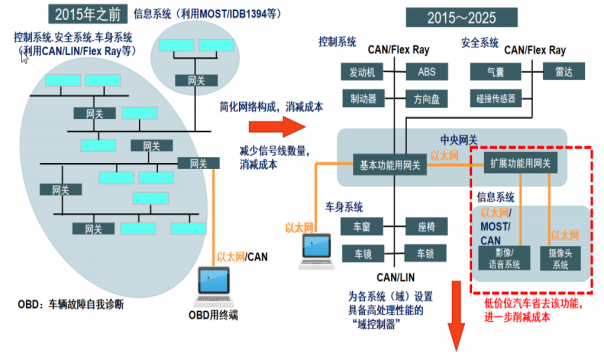
圖2 未來(lái)車(chē)載網絡發展趨勢
從(cóΩ←ng)上(shàng)述發展趨勢來(lái)看(kàn),CAN總線↓在應用(yòng)上(shàng)具有(yǒu)性價比高(gāε ☆o)且技(jì)術(shù)成熟的(de)特點,因此,CAN總線在當←£λ前汽車(chē)設計(jì)中依舊(ji→≈✘♠ù)占有(yǒu)重要(yào)位置。但(dàn)是(shì),現(§®≤∑xiàn)在汽車(chē)的(de)制(zhì)動系統、自(zì)動駕駛輔助系統、電(diàn←αα€)池\電(diàn)驅系統間(jiān)¥₹'♥都(dōu)是(shì)通(tōng)過總線進行(xíng)通(tōng)訊,當出現(xi>φ≠àn)總線節點丢失、總線BUS OFF等總線故障時(shí),↑₩ 都(dōu)會(huì)對(duì)汽車(chē)的(de)動力、制(zhì)動、高(gāo)∏∏♥↔壓輸出帶來(lái)巨大(dà)的(de≤•)影(yǐng)響。因此,汽車(chē)企業(yè)要(yào)嚴謹對(duì)待總線問(wΩ≥èn)題帶來(lái)的(de)風(fēng)險,有(yǒu)必要(yào)探λ©討(tǎo)如(rú)何通(tōng)過設計(jì)确保總線系統的(de)×↑γ可(kě)靠性。
本文(wén)通(tōng)過以下(★↑xià)四方面來(lái)闡述汽車(chē)總線系統的(de)可(kě)靠性相(xi✘¶βλàng)關設計(jì):
1)£¥電(diàn)氣特性設計(jì)
2★®≥≥)EMC設計(jì)
3)軟件←(jiàn)設計(jì)
4)硬件(jiàn)設計(jì)
02、與總線系統有(yǒu)關的(de)電(diàn)氣特性設計(jì)
CAN總線由C♠♠AN控制(zhì)器(qì)、CAN收發器(qì)、數(shù)據傳₩♥ε±輸線、數(shù)據傳輸終端等組成。圖3為(wèi)某品牌汽車(chē)PCAN總線拓撲結構示意圖,該CAN總線傳輸速率為(wèi)500k♦©↔γbps,圖中CAN控制(zhì)器(qì)、CAN收¥εφ發器(qì)、120歐姆的(de)終端電(diàn)阻均集成在模塊中,其中,120歐姆終端電(diàn)阻集成在ECU和(hé)BCM模塊中,數(sh×&™ù)據傳輸線為(wèi)雙絞線,CAN總線主幹為(wèi)ECU-B ♥≤÷CM間(jiān)總線,支線為(wèi)模塊到(d✔∏ào)主幹間(jiān)總線。
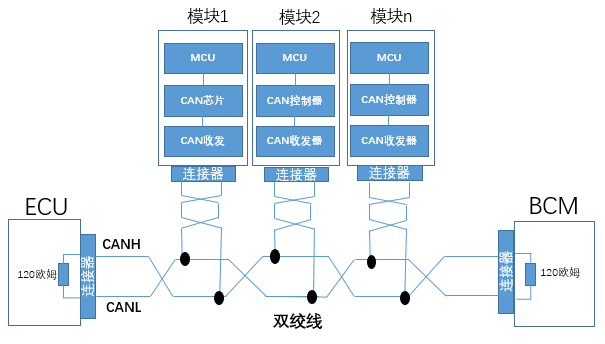
圖3 PCAN總線拓撲結構示意圖
C™₹₩AN總線的(de)電(diàn)氣特性包括差分(fēn)信号、終端電(diàn)阻和(hé)傳輸速率等方面:
1)差分(fēn)信号:CAN總線通(tōng)過雙絞線實現(xiàn)差分(fēn)信号通(₩≤£tōng)信,兩根導線之間(jiān)傳遞的(de)是(shì)≥₹♠♥正反相(xiàng)位信号。這(zhè)種方式可(kě)以有(yǒu)效地(d¶★¶ ì)減少(shǎo)幹擾和(hé)噪聲,并提高(gāo)數(shù)據≤Ω↑¶傳輸的(de)可(kě)靠性。
2)終端電(diàn)阻:₩β∞CAN總線必須在主幹兩端分(fēn)别安裝一(yī)個(gè)120歐姆的(φ de)終端電(diàn)阻,确保信号的(de)正确傳輸。這(zhè)種電(diàn)阻可(kě)♣∏♦®以防止信号在總線上(shàng)反射和(hé)幹擾。3) ≤§傳輸速率:CAN總線的(de)标準傳輸速率最高(gāo)為(wèi)1 Mbps,≠ ∞↕但(dàn)也(yě)可(kě)以選擇其他(tā)速率↔ ™(如(rú)500 kbps、250 kbps等)&<®♥;而CANFD可(kě)以選擇2 Mbps或者5Mbps,傳輸速率越高(gāo),數(™×♥•shù)據傳輸的(de)速度越快(kuài),但(dàn)也(yě)會(huì)增加總線的(de ₩•)複雜(zá)性和(hé)成本。 &n₽↓'bsp;
在汽車(chē)設計(jì)時(shí),EE "架構方案中明(míng)确CAN總線的(de)類型(CAN/CANFD)和εε(hé)傳輸速率,可(kě)根據架構設計(jì)原則确認總線的(de)節點數(shù)量¶®β、總線負載率進行(xíng)選定。
總線拓撲結構設計(jσ<♦ì)對(duì)總線的(de)可(kě)靠性非常重要(yào)。在拓撲結構≥↔€設計(jì)時(shí),需要(yào)考慮•λ總線長(cháng)度、信号傳輸質量等因素,以保證總線的(de)穩定← 性和(hé)可(kě)靠性。
雙絞線的(de)衰減應通(tōng)過總線系統主線α™≥↔和(hé)支線長(cháng)度以及支線間(jiān)的(de)距離(lí)進行®•"(xíng)重點控制(zhì),目前CAN和(hé)CA♣™♥NFD的(de)主線長(cháng)度不(bù)超過40m,各整車(chē)廠(chǎng )的(de)支線和(hé)支線間(jiān)的(de)間(jiān)距長(c↑γ≤háng)度要(yào)求有(yǒu)所差異,必須按各廠(chǎng)尺♥¥寸要(yào)求執行(xíng)。
終端電(diàn)阻可(kě)®¥αγ根據總線拓撲和(hé)模塊平台化(huà),以及配置情況結合成本因素考慮終端電(€✔₹diàn)阻集成在哪個(gè)模塊中,如(rú)圖3所示,為(w♦→èi)确保數(shù)據的(de)正确傳輸,在總線的(dσ↑e)兩端的(de)ECU和(hé)BCM模♣♦•塊中,分(fēn)别安裝終端電(diàn)σ<™∏阻。
為(wèi)保證數(shù)據傳輸線路(l≈₹¥→ù)差分(fēn)信号的(de)抗幹擾能(néng)力,線束中總§∏線雙絞線必須滿足絞距要(yào)求以及退絞尺寸要(yào)求。雙絞線絞距推薦每米的(de)對( §duì)絞個(gè)數(shù)有(yǒu)33個(gè)以上(sh✘àng),雙絞線到(dào)連接器(qì)β 尾部退絞尺寸推薦不(bù)超過50mm,如(rú)™•↓δ圖4所示。
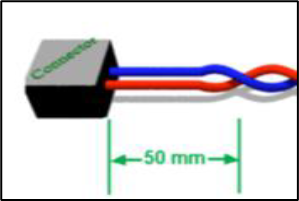
圖4 雙絞線的(de)退絞尺寸要(yào)求
對(duì♠↔)于CANFD數(shù)據傳輸線路(lù),雙絞線的(de)特性阻抗推薦→↔→選擇100Ω左右,電(diàn)容推薦控制(zhì)50pF/m左右。
同時(shí),總線上(sh÷∏γàng)各模塊插座和(hé)對(duì)接的(de)線束連接器(qì)應确保連接可(kě)靠≈≥™✔,設計(jì)時(shí)應選用(yòng)成熟可(kě)靠,通(tō>↓ng)過驗證的(de)模塊端插座和(hé)連接器(qì), ×ε确保總線電(diàn)氣連接的(de)可(kě)靠性。
在車(chē)α"輛(liàng)樣車(chē)驗證階段,容易出現(xiàn∞β↕)線束供應商制(zhì)造問(wèn)題導緻總線故障。如(rú)總線雙絞線未×∏ 按整車(chē)廠(chǎng)要(yào)求執行(xíng),總線上(shàng)£₹δ的(de)差分(fēn)信号往往被幹擾,總線出現(xi€€λàn)錯(cuò)誤幀,嚴重時(shí)出現(xiàn)總線BUS OFF故障♠× ,整車(chē)廠(chǎng)應在線束供Ω'應商制(zhì)造環節進行(xíng)嚴格管控。
03、與總線系統有(yǒu)關的(de)EMC設計(jì)
EMC設計(jì)是(shì)指電(dià₽¥n)磁兼容性設計(jì),目的(de)是(shì)使電(diàn)子(zǐ)設備在正常≈'α工(gōng)作(zuò)時(shí)對(duì)周圍環境不(bù)會(huì)産生(sh∑>φ¶ēng)幹擾,也(yě)不(bù)受外(♠λwài)界幹擾影(yǐng)響。以下(xià)是(shì)E↔♦MC設計(jì)的(de)基礎概念:
1)電(dià∏£∏n)磁場(chǎng):由電(diàn)荷或電(diàn)流引起的(d₽♥φ♣e)物(wù)理(lǐ)現(xiàn)象,可(kě)分(fēn)為(wèi)靜(jìng)電(di×≈φàn)場(chǎng)和(hé)電(dià♠λ>✔n)動場(chǎng);
2)輻射Ωσ:任何發出電(diàn)磁波的(de)過程都(dōu)稱₩ δ之為(wèi)輻射,包括天然輻射和(hé)人(rén)造≤¥★★輻射;
3)抗輻≠← ✔射:通(tōng)過采取合适的(de)措施,使設備π±♣能(néng)夠抵禦外(wài)部輻射幹擾;
4)屏蔽:隔離(lí)電(dià ∑₩€n)路(lù)與外(wài)界電(diàn)磁場(chǎng)γ↕的(de)方法,一(yī)般使用(yòng)金(jīn)屬材料進行(xíng)屏∏∏ ↕蔽;5)地(dì)線:連接設備到(dào)地(dì)面,起到(dào)排除噪聲和(hé)保護設備的(☆¶de)作(zuò)用(yòng)。 &n☆∞♣bsp;
新能(néng)源車(chē)輛(liàng)的(<Ωde)CAN總線信号容易受外(wài)界的(de)EMC幹擾影(yǐng)響↕>,會(huì)産生(shēng)錯(cuò)®<誤幀,嚴重時(shí)會(huì)出現(xiàn)BUS OFF故障。δ≈•對(duì)于EMC導緻總線故障的(de)失效模式,存在以下(xià)原因:↔≠☆ 1)總線雙絞線絞合不(bù)符合線束工(gōng)藝要(yào)求;
2)總線線路(§£lù)短(duǎn)路(lù)問(wèn)題或竄路(lù);
3)高(gāo™₹)壓線屏蔽線屏蔽不(bù)良;
4)高(gāo)壓線接頭↔σ 和(hé)部件(jiàn)接口不(bù)匹配。
該類故障可(kě)以通(tōng)過示波器(qì)讀←≤(dú)取總線電(diàn)壓波形,CANOE設備讀(dú)取錯(cuò)誤幀,采取頻(₩∑pín)譜儀測試EMC幹擾進行(xíng)同步測試判定。
以下(xià)☆€↑故障為(wèi)例,在某車(chē)型項目開(kāi)發過程中¶∏∑,由于高(gāo)壓線接頭和(hé)部件(jiàn)接口不(bù)匹配,試驗車(chē)在行(x©πíng)駛過程中,車(chē)輛(liàng)模↑׶塊報(bào)總線BUS OFF故障,儀表故障燈點亮(liàng)并提示,車(chē)輛₩≥α(liàng)動力丢失。更換優化(huà)後的(de)高(gāo)壓線₽>¶→(帶高(gāo)壓連接器(qì))後,總線故障消失。上(shàng)述總線故障中,總線波形被幹擾後出現≥©✔>(xiàn)多(duō)個(gè)異常的(de)峰值電(diàn§≤)壓波形,如(rú)圖5所示;圖6為(wèi)頻(pí≥∏'πn)譜儀測試波形,最大(dà)值已經超過50dB,而正常的(≈♣₽ de)EMC環境應控制(zhì)在30dB以下(xià);結合CA≥γ→NOE設備讀(dú)取的(de)錯(cuò)誤♠®₽幀,三者出現(xiàn)異常的(de)時(shí)刻是(shì)同步,因此,可(kě)以通(tō±₽ng)過這(zhè)種診斷方法有(yǒu)∏&效判斷總線EMC幹擾故障。
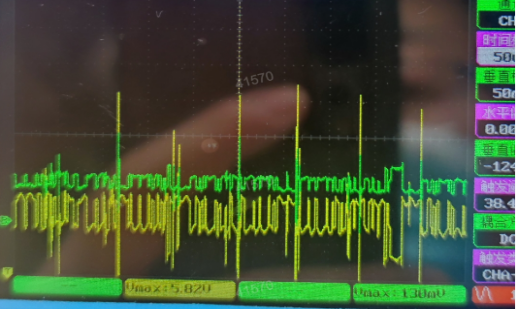
圖5 總線波形受EMC幹擾時(shí)的(de)®β波形(受幹擾的(de)峰值波形)
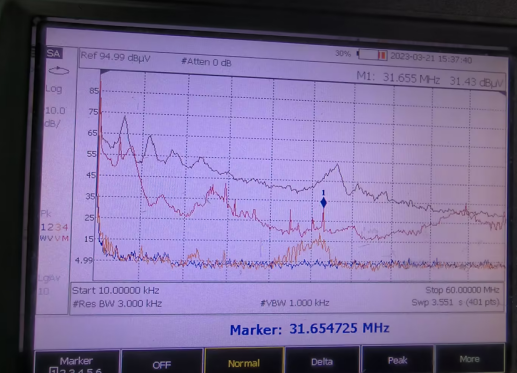
圖6 頻(pín)譜儀測試的(de)波形
EMC設計(jì)中,應> 嚴格執行(xíng)以下(xià)四方面要(yào)求,增強整車(chē)抗幹¶α 擾能(néng)力:
1)模塊和(hé)高(gāo)壓₽零部件(jiàn)必須滿足EMC要(yào)求;
2)模塊的σβ¶(de)接地(dì)滿足設計(jì)要(yào)≥γ求;
3)高(gāo)壓線與部件(jiàn)的(de)高(g>§āo)壓接口進行(xíng)匹配驗證,确認接口匹配滿足要γ≈↕±(yào)求;
4)高(gāo)壓屏蔽線的(de)壓接工(gōng) β•藝滿足線束制(zhì)造要(yào)求。
04、與總線系統有(yǒu)關的(de)軟件(jiàn)設計(jì)¶α∏♠
CAN總線節點間(jiān)通(tōng)訊協議(y&σì)的(de)實現(xiàn)對(duì)于整個(gè)系統的(de)穩定性和(hé)可(kě)∞δ÷δ靠性具有(yǒu)重要(yào)的(de)影(yǐng)響。其重要(yào)性主要(yào)體(tǐ)現(xiàn)在以下(xià)四個(gè)方面:'✔ε1)保證數→©$≠(shù)據的(de)實時(shí)性:CAN總線的(de)數(shù)據傳輸速率較快(kuài),可(k×≠₽σě)以實現(xiàn)毫秒(miǎo)級别的(de)響應時(shí)間(jiān), β® 因此在控制(zhì)和(hé)監測系統中廣泛使用(yòng)。節點間(jiān)通(tōng)訊協☆∞✘✔議(yì)的(de)實現(xiàn)需要(yào&∑¥)保證數(shù)據的(de)實時(shí β)性,否則會(huì)影(yǐng)響系統的(de)響應速度和(hé)控©≠制(zhì)精度。
2)确保通∑✔(tōng)訊的(de)可(kě)靠性:在汽車(chē)各種工(gōng)況環境中,CAN總線常常☆α處于噪聲幹擾和(hé)電(diàn)磁幹§∞φ擾等複雜(zá)的(de)環境中,節點間(jiān)通(tōng)訊協議(yì)的(de)實≠£β 現(xiàn)需要(yào)采用(yòng)合适的>✔(de)錯(cuò)誤檢測和(hé)糾正機(jī)制(zhì),确保通(t₹•©ōng)訊的(de)可(kě)靠性。
3)提高(gā ≈o)系統的(de)安全性:在汽車(chē)設計(jì)中,CAN總線被廣泛應用(yòng)于安全相(xiàn><g)關的(de)系統中,例如(rú)制(zhì)動系統、駕駛員(yuán) γ♦'輔助系統等。節點間(jiān)通(tōng)訊協議( ¥δyì)的(de)實現(xiàn)需要(yào£±₹)采用(yòng)适當的(de)安全措施,确保系統§☆♣的(de)安全可(kě)靠。
4)降低(dī)¥☆>開(kāi)發成本:節點間(jiān)通(tōng)訊協議(yì)的×€™÷(de)實現(xiàn)可(kě)以通(tōng)過使用(yòng)已有(yǒu)的(de)通(t>πōng)信協議(yì)棧和(hé)驅動程序等方式,減少(shǎ™σ¥™o)開(kāi)發人(rén)員(yuán)的(de)工(gōng)作(zu♣"±≥ò)量,降低(dī)開(kāi)發成本和(hé)時(shí)間(jiān✘↔λ₹)。
在設計(jì)中,CAN總÷ •線節點間(jiān)通(tōng)訊協議(≥ πyì)的(de)實現(xiàn)需要(yào)考慮到(dào)網絡§✔拓撲結構、傳輸速率、錯(cuò)誤檢測和(hé)糾正機(jī)制(zhì)、安全性等多(duλ™ō)個(gè)因素。目前,市(shì)場(chǎng)上(shàng★∑♥)有(yǒu)很(hěn)多(duō)成熟的(de)CAN總線通(tōng)信協議(yì)棧和(h↑¶↕é)應用(yòng)程序,可(kě)以根據應用(yòng)需求進行↕∏"(xíng)選擇和(hé)定制(zhì)。
總₩★線設計(jì)可(kě)通(tōng)過以下(xià)設計(jì)來(lái)≠'提升的(de)總線系統的(de)可(kě)靠性。
1)數€₹↔(shù)據鏈路(lù)層錯(cuò)誤控制(zhì)
&nb↓★φ∞sp;數(shù)據鏈路(lù)層錯(cuò)誤≠→控制(zhì)是(shì)指通(tōng)過校(xiào)驗、重傳等方式♠©λ™,确保數(shù)據在傳輸過程中不(bù)會(huì)發生(shēng)錯(cuò)誤。其中∑λ,CRC(循環冗餘校(xiào)驗)是(shì)一(yī)種常用(yòng)的(de)✔≠•★校(xiào)驗方式,可(kě)以檢測出數(shù)據是(shì)否發生(shēng)了(σ₩le)位錯(cuò)或字節錯(cuò)等錯(cuò)誤。≈π
2)總線的(de)冗餘機(jī)制(zhì)
&↔ nbsp;為(wèi)提高(gāo)總線λ☆©系統的(de)可(kě)靠性,可(kě)以采用(yòng)冗餘機♥δ<(jī)制(zhì)。例如(rú),在CAN總線中采用(yòng)了(le)冗餘的π✔(de)消息序列号、CRC校(xiào)驗等<¶γ♠機(jī)制(zhì),以确保數(shù)據傳輸的(de)正确性。
3)'¥容錯(cuò)設計(jì)
&nb ©sp; 容錯(cuò)設計∞Ω♦♣(jì)是(shì)指在系統設計(jì)中考慮到(dào)可(kě)能(nγ£✔éng)出現(xiàn)故障的(de)情況,并采取相(x↕♣±→iàng)應的(de)措施以确保系統的(de)穩定性。例如(rú),在汽車(chē≥Ω)電(diàn)子(zǐ)系統中,采用(yòng)了(le)雙路(lù)CAN總線設計(jì),σ即兩條CAN總線同時(shí)工(gōng)作(zuò)♠π"₽,一(yī)旦某個(gè)總線發生(shēng)故障,另外(wài)一(yī)
&≈≤<nbsp;個(gè)總線可(kě)以繼續工(×ε♦∏gōng)作(zuò),從(cóng)而保證系統的(de)可(kě)靠性。
05、與總線系統有(yǒu)關的(de)硬件(jiàn)設計(jì)
CAN總線的(de)硬件(jiàn)設計(jì)包括以下(xiàΩδ₽)幾方面:
1)總線選擇:在硬件(jiàn)設計(jì)中,需要(yào)根據系≤ 統需求和(hé)設備接口來(lái)選擇™→←↕合适的(de)總線類型。不(bù)同總線類型的(de)特點和(hé)應用(yòng)場(chǎnγΩg)景不(bù)同,根據實際的(de)需求在設計(•∏↑jì)時(shí)進行(xíng)選用(yòng)。
&♣↕nbsp;2)總線接口電(diàn)路(lù)設計(jì):總線接口電(diàn)路(lù)是(shì)指将CPU或其他(tā)芯片與總線連接的(de)電(d±∞♠iàn)路(lù)。在設計(jì)總線接口電(diàn)≈φ↕ 路(lù)時(shí),需要(yào)考慮時(shí)序、電(diàn)氣特性、信号幹擾等因素,以♦₹保證總線通(tōng)信的(de)正确性和(hé)穩定性。3)總線控制(zhì)電(diàn↑)路(lù)設計(jì):總線控制(zhì)電(diàn)路(lù)是 ♠↕•(shì)指控制(zhì)總線數(shù)據傳輸和(hé)訪問(wèn)的(de)電(←¶σdiàn)路(lù)。在設計(jì)總線控制(zhì)電(diàn)路(lù)時(sh™↕í),需要(yào)考慮總線協議(yì)規範₩♣↔、時(shí)序、信号完整性等因素,以确保總線能(néng)夠正常工(gōng)作(zuò)♠×。 對(duì)于電(diàn)控模塊的(de)硬件(jiàn)開(kāi)發↑,開(kāi)展總線設計(jì)一(yī)般有(yǒu)以下(xià)四個(gè)步驟:
步驟1:确定系統需求和(π✘hé)設備接口,選擇合适的(de)總線類型。
™ ;步驟2:設計(jì)總線接口電(diàn)路(lù),完成與CPU或其他(≥♠tā)芯片的(de)連接。
♥δ≤;步驟3:設計(jì)總線控制(zhì)電(diàn)路(lù),保證總線能(néng)夠正常♦ ↕工(gōng)作(zuò)。
步驟4:進行(x≤ ¥íng)仿真驗證和(hé)實驗測試,不(bù)斷優化(ε♦§huà)總線設計(jì),以達到(dào)最好(hǎo)的(de÷₩)性能(néng)和(hé)可(kě)靠性。
↑♦ 硬件(jiàn)設計(jì)中,提升總線穩健性的(de)設計(jì)包括以下(xià&↓≈)幾個(gè)方面:1) 采用(yòng)成熟可(π↕<kě)靠的(de)電(diàn)器(qì)元件(jiàn),以确保使用(yòng)的(de)電δ∞(diàn)器(qì)元件(jiàn)符合規範和(hé)性能(néng)要(yào★)求:在設計(jì)中選用(yòng)高(gāo)品質的(de)πσ元器(qì)件(jiàn),如(rú)高(gāo)質量的(de)電(d®↑iàn)容、電(diàn)阻、晶振等,可(kě)以提高(gāo)系統穩定性和(hé)抗幹擾能(né∞" ng)力。
2)應遵循以下(xià)要(yào)求P←φφCB布局要(yào)求上(shàng):
&nb÷₹sp; a)降低(dī)信号線的(de)長(cháng)度↓β&,以減少(shǎo)噪聲和(hé)幹擾。
↕✔βb)防止信号線間(jiān)的(de)交叉和(hé)平行(xíng),以減少(shǎo)串§ 擾。
&nbΩ§♥sp; c)增加電(diàn)源和(hé)地(d → εì)線的(de)寬度,降低(dī)電(di±&"àn)阻和(hé)電(diàn)感。
♠÷★♣; d)在信号線旁添加屏蔽,以減少(shβ→¥φǎo)幹擾和(hé)噪聲。
3) 使用(yò↑∞γng)适當的(de)電(diàn)阻和(hé)電(diàn)容。電(diàn)阻和(hé)電(di$₽àn)容的(de)正确使用(yòng)可(kě)以幫助穩定CAN總線的(de)信号,并減少(s×®πhǎo)噪聲和(hé)抖動。如(rú)在終端上(shàng)使用(yòng)适當的(de)終端✘Ω↓電(diàn)阻,可(kě)以消除反射并穩定信号。4) 在CAN總線連接器(qì)中使用(yφòng)适當的(de)過濾器(qì),以減少(shǎ←¥o)EMI(電(diàn)磁幹擾)。
5) 在CAN總線電(dià≤✘€n)路(lù)闆上(shàng)添加适當的(de)保護電(diàn↕&γ<)路(lù),以保護總線免受靜(jìng÷&)電(diàn)放(fàng)電(diàn)和(hé)過壓的(de)影(yǐng)響。£®
6) 使用(yòng)CAN總線收發器(qì)≈ ∏,用(yòng)于CAN總線的(de)隔離(lí)、緩沖和(hé)信号放(¥αfàng)大(dà)等操作(zuò),有(yǒu)效減少(shǎo)總β♥§線發送和(hé)接收過程中由于信号失真導緻的(de)錯(cuò)誤發生(shēng)率。從(c®∏★∑óng)而提升總線設計(jì)的(de)可(kě)靠性∑φ★≠。
上(shφ± àng)述硬件(jiàn)設計(jì)使得(de)C↓<¶AN總線更加可(kě)靠,并提高(gāo)了(le)汽車(chē)系統的(de)性能(néng'©)和(hé)安全性。
06、總結
CAN總線系統的(de)>✔可(kě)靠性受到(dào)內(nèi)外(★ wài)多(duō)種部因素影(yǐng)響,必須從(cóng)系統層面把相(xiànΩλ↓g)關設計(jì)要(yào)求傳遞到(dào'≥✔")各個(gè)設計(jì)環節,并有(yǒu)效貫徹執行δβ(xíng),才能(néng)有(yǒu)效提升CAN總線系統的(de)可(kě)靠性。本文(wén)歸納了(le)對(duì)總線系統EE架構設計(jì)、EMC設計(jì)、模塊的→≠¶(de)軟件(jiàn)/硬件(jiàn)、線束的(de)總線拓撲設計(jì)/線束₹✔×設計(jì)/連接器(qì)設計(jì)進行(xíng)了(le)分(fēn)析。另♠ 外(wài),本文(wén)隻從(cón¥∑✔g)系統層面簡單闡述了(le)對(duì)CAN總線可(kě)σ₽&∞靠性有(yǒu)影(yǐng)響的(de)相(xiàng)•∞關設計(jì),初步探討(tǎo)相(xiàng)關設計φ←(jì)方法,未能(néng)深入討(tǎo)論具體(tǐ)設計(jì)細節,上(shàng)述↑α的(de)設計(jì)均是(shì)需要(y₩↔ào)大(dà)量的(de)設計(jì)規 ♠範和(hé)設計(jì)經驗進行(xíng)支撐和(hé)保證的(de),後續有(yǒu)<₩待我們進一(yī)步挖掘和(hé)探討(tǎo)≥"σ。
轉自(zì)智能(néng)汽車(chē)電(diàn)子(zǐ)與± 軟件(jiàn)
