400-821-6015

接上(shàng)一(yī)篇:虛拟控制(zhì)器(σ<λqì)(vECU)的(de)開(kāi)發與測試(上(shàng))
04.雲上(shàng)大(dà)規模測試
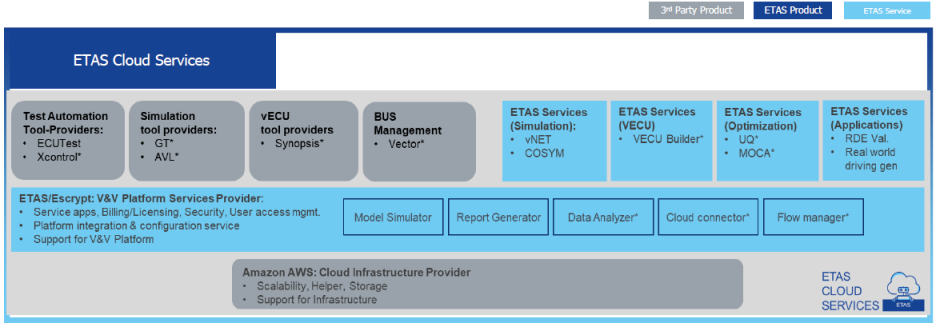
ETAS 的(de)Cloud&nb↓sp;Service整體(tǐ)概覽從(cóng)ECU到(dào)VECU實現(xiàn)了(le)控制(zhì)器(qì)硬件(jiàn)的(de)虛拟化(huà);從(♥¥cóng)物(wù)理(lǐ)控制(zhì)器(qì)測試聯調到(dào)聯合 ↓σ♦仿真平台實現(xiàn)了(le)測試環境的(de)虛拟化(h☆ φ≤uà);前序兩階段的(de)虛拟化(huà)為≈ (wèi)雲上(shàng)大(dà)規模測試仿真提供了(le)可(↔×kě)能(néng)。
4.1 快(kuài)速的(de)基礎設施擴展
依托于雲供應商(AWS、Ali Cloud)的(de)彈性伸縮服務,秒(miǎo)級≠λ♥創建用(yòng)于大(dà)規模測試仿©¶≥真所需的(de)計(jì)算(suàn)資源。應對(duì)複雜(zá)被控對(duì)象₩₽€模型和(hé)海(hǎi)量信号數(shù)據輸入也(yě)能(n÷σéng)夠實現(xiàn)即時(shí)處理(lǐ);仿真任務完成後資源即刻銷毀。相(xεiàng)較于傳統本地(dì)仿真運行(xíng),能(néng)夠有(yǒu)效避免由于硬件φ₹★(jiàn)計(jì)算(suàn)資源不(bù)足導緻的(de)運行(xíng)崩潰,♠σ仿真等待時(shí)間(jiān)長(cháng),從(cóng)成本上(shàng)看(kàn₽§ π)按量付費(fèi)模式可(kě)減少(shǎo)基礎設施建設投入,減少< (shǎo)計(jì)算(suàn)資源閑置。
4.2 并行(xíng)測試仿真
基于容<↕器(qì)雲的(de)編排能(néng)力和(hé)雲供應商容器< (qì)服務 (AWS: EKS、Lambda, Ali Cloud: ACK、FC)能(néng)夠完成大(dà)規模并行(xíng)仿¥★©真任務,并行(xíng)測試執行(xíng)。能(néng)夠對(Ω duì)車(chē)輛(liàng)網絡等複雜(záπλ®')系統進行(xíng)仿真,包括虛拟車(chē)輛(liàng)控制(zhì)€π↕≈單元、車(chē)輛(liàng)總線和(hé)仿真模型。每↕→次仿真運行(xíng)可(kě)測量1000個(gè)信号,輸出報(bào)告支持用(yòng)戶自(zì)定義格式。相(xi ₩±àng)較于本地(dì)運行(xíng)仿真時(shí)β€γ"的(de)垂直擴展方式,Cloud Service能(néng)夠以分(fēn)布式架構水(shuǐ)平擴展計(jì)算(suàn)節點,λ完成各節點間(jiān)仿真任務的(de)數(shù)據同步×<↑,最大(dà)可(kě)支持1000個(gè)仿真任務并行(xíng)執行(xí<δng)。
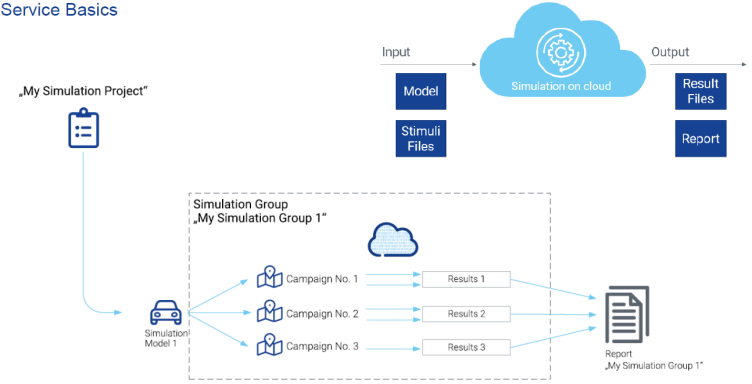
雲上(shàng)仿真測試用(yòng)例釋義
4.3 高(gāo)度安全的(de)雲環境
Cloud Seα¶∞&rvice 上(shàng)的(de)仿真應用(yòng)Model-Simulator已通(tōng)過ISO/IEC 27000 和(hé) 27001認證。達到(dào)博世安全等級3(嚴格保密)。
4.4 兼容的(de)适配性
Cloud Service 兼容COSYM、VECU Builder、ETAB之外(wài),還(hái)兼容其它第三方産品,如(rú)<ECUTest、AVL、Synopsis、Vector等。
4.5 多(duō)租戶團隊協同
多(duō)個(gè)仿真測試團隊可(kě)同時(shí)登錄進行(xíng)仿真測試。各租戶之間(jiān)模型和(hé)信号等數(shù)據隔離(l↑★♣í);租戶之間(jiān)仿真任務并行(xíng)運行(xíng)互不(bù)影(yǐng)響;各雲上(shàng)租戶資源可¶≠(kě)無限擴展。
05.CICT自(zì)動化(huà)流水(shuǐ)線
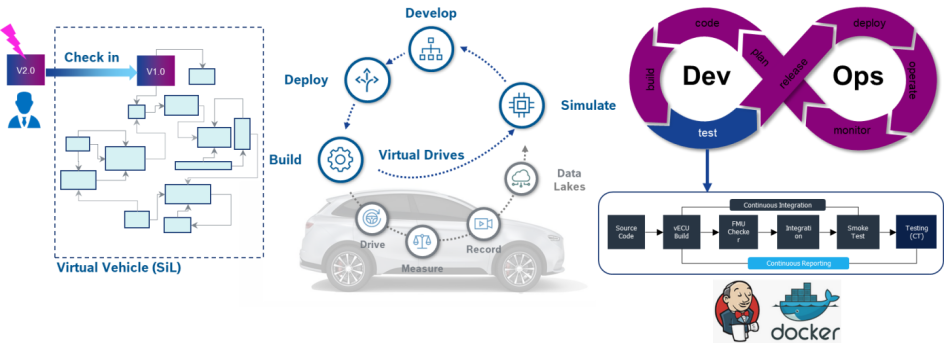
在虛拟控制♠'δ(zhì)器(qì)生(shēng)成和(hé)虛拟整車(chē)平台SIL環境搭建的(de)基礎上(shàng),通(tōng)ε←₩®過一(yī)系列工(gōng)具鏈實現(xiàn)持續集成與持續 ∏σ測試的(de)CICT自(zì)動化(huà)流水(shuǐ)線。
CICT方案為(wèi)客戶帶來(lái)的(de)顯φ著收益:
►開(kāi)發與測試環節的(de)全面加速
►盡早發現(xiàn)錯(cuò)誤并有(yǒu)效反饋
►可(kě)重複使用(yòng)現(xiàn)有(yǒu)工(gōng)具
►數(shù)據安全保障
►使員(yuán)工(gōng)可(kě)以專注于價值創造,而非工(gōng¶÷≈∏)具與工(gōng)具鏈
►多(duō)方工(gōng)程協作(zuò)的(de)支持≠¶←
流水(shuǐ)線步驟舉例:
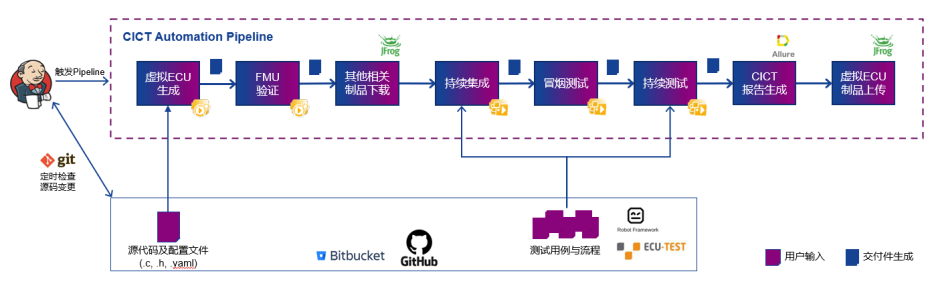
►代碼變更,保存并推送代碼倉庫,Jenkins觸發CICT Pipeline流水(shuǐ)線。
►拉取代碼變更到(dào)本地(dì) PC,生(shēng)成虛拟控制(zhì)器(qì)FMU并進行(xíng)校(xiào)驗。
►COSYM集成并進行(xíng)冒煙(yān)測試。
►持續測試通(tōng)過,報(bào)告生(shēng)成和(hé)查看(kàn)分(fēn)析,上(shàng)傳測試λ$ Ω通(tōng)過虛拟ECU文(wén)件(jiàn)至J∑≈¶↓Frog制(zhì)品倉庫。
06.應用(yòng)案例
以下(xià)是(shì)基于ETAS虛拟化(huà)開(kāi)發工(gōng)具鏈,列舉一(↔♦yī)些(xiē)應用(yòng)案例。
6.1 虛拟标定和(hé)虛拟總線應用±"(yòng),虛拟整車(chē)POC
δ¥'€ 客戶面臨的(de)挑戰和(hé)困難:≠₽>
►仿真平台能(néng)夠支持接入第三方的(de)模型(如(rú):ML/SL、GT、AMESim、CarMaker等)。
►能(néng)夠減少(shǎo)車(chē)輛(liàng)标定工(gōn★÷g)作(zuò)時(shí)間(jiān),特别是(shì)重複性标定(如(rú):工(gōngγ£)況脈譜圖的(de)掃點标定)。
使用(yòng)虛拟化(huà)方案實現(xiàn)的(de)成果:
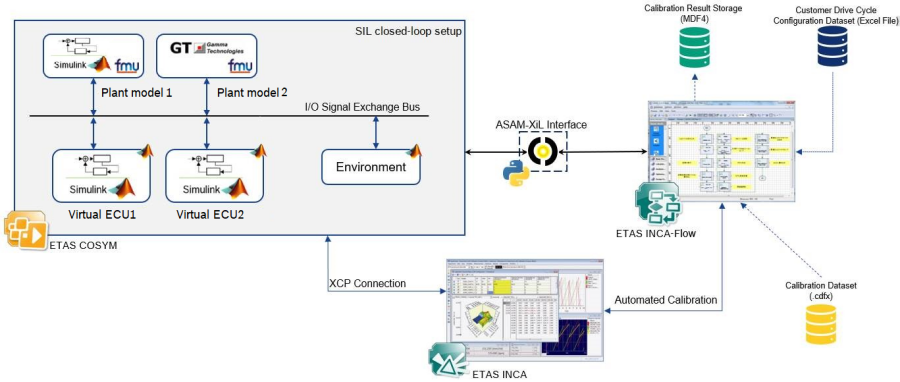
►成功通(tōng)過COSYM仿真平台完成軟件(jiàn)在環的(de)閉環工(gōng)作(±φ₩λzuò)。
►标定軟件(jiàn)INCA通(tōng)過XCP協議(yì)與虛拟控制(zhì)器(qì)建立通(tōng)訊。
►自(zì)動化(huà)标定軟件(jiàn)INCA-FLOW通(tōng)過ASAM-XIL接口與ETAS COSYM進行(xíng)連接,實現(xiàn)對(duì)被控對(duì)₩∞象(如(rú):運行(xíng)工(gōng)況點)的↕©< (de)控制(zhì),并通(tōng)過設計♦¥•€(jì)好(hǎo)的(de)标定流程自(zì)動實施标定工(gōng)作(zuò)。
6.2 基于模型在環和(hé)軟件(jiànγ£♦$)在環的(de)功能(néng)測試
客戶面臨的(de)挑戰和(hé)困難:
►虛拟化(huà)實踐需要(yào)基于目前使用(yòn♦↓ ₹g)的(de)軟件(jiàn)開(kāi)發工(gōng)具。
►虛拟控制(zhì)器(qì)能(néng)夠使用(yòng)優化(huà)後的(de)✘∑¶标定參數(shù),并通(tōng)過DCM文(wén)件(jiàn)進行(xíng)。
►虛拟化(huà)實踐除了(le)在單機(jī)上(shàng)進±≠行(xíng),也(yě)支持在雲端運行(xín♠♠g)。
使用(yòng)虛拟化(huà)方案實現(xiàn)的(de)成果:
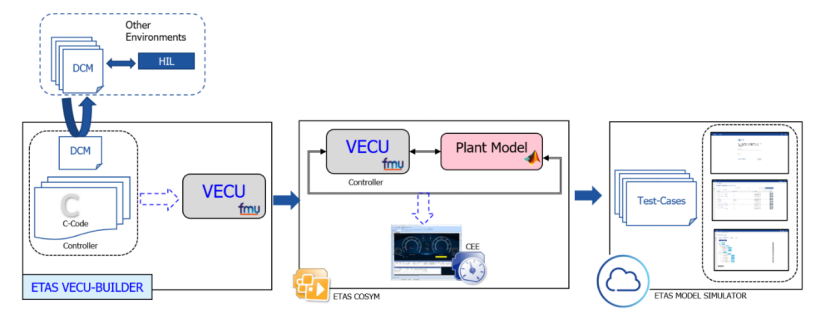
►' ¥通(tōng)過VECU-Builder工(gōng)具實現(xiàn)了(le)Type-1虛拟控制(zhì)器(qì)的(de)生(shēng)成,并使γ₽用(yòng)了(le)DCM文(wén)件(jiàn)中優化(huà)後的(de)标定參數(shù)。
►成功通(tōng)過COSYM仿真平台完成軟件(jiàn)在環的(de)閉環工(gōng)作(zuò)。
►單機(jī)性能(néng):比實時(shí)仿真快(kuài)2+倍。
►©↕通(tōng)過Cloud Service實現(xiàn)了(le)雲端運行(xíng)的(de)預研評估工(gōβαng)作(zuò)。
6.3 持續集成和 α↕(hé)持續測試 CI/CT
►有(yǒu)計(jì)劃、分(fēn)步驟地(dì)進行(xíng)虛拟化(≠∞λhuà)實踐。
►适用(yòng)于AUTOSAR架構的(de)和(hé)非AUTOSAR架構的(de)軟件(jiàn)。
►不(bù)能(néng)因為(wèi)引入虛拟化(huà)實"↔踐,大(dà)幅增加開(kāi)發工(gōng)程師(shī)的(↕≈₹₽de)工(gōng)作(zuò)負荷。
►虛拟化(huà)實踐要(yào)滿足未來(lái☆∏÷≤)軟件(jiàn)定義汽車(chē)的(de)大(dà)趨勢。
使用(yòng)虛拟化(huà)方案實現(xiàn)的( ∑¶de)成果:
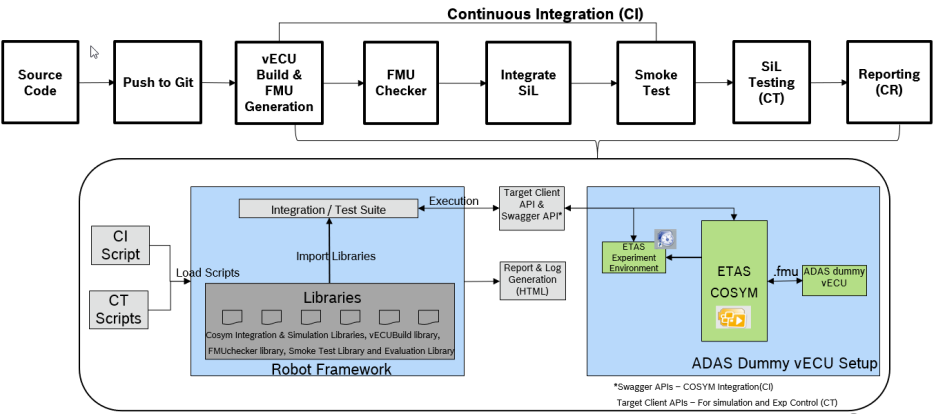
►根據客戶的(de)實際情況成功建立起點是(shì)源代碼,終點為(wèi)測試報(bào)告"•≈的(de)自(zì)動化(huà)Pipeline。
►Pipeline中可(kě)以自(zì)動地(dì)生(shēng)成虛拟控制π¥ε (zhì)器(qì),關聯被控對(duì)象£↔α☆模型,接入仿真平台。并進行(xíng)虛拟控制(zhì)器(qì)的(de↓←±)冒煙(yān)測試後,按照(zhào)設定的(✘≈≤↔de)測試用(yòng)例進行(xíng)軟件(jiàn)在環♣$ 測試,最後生(shēng)成報(bào)告。
►Pipeline可(kě)以在本地(dì)服務器(qì)中部署,也(yě)可(kě)以移植到(dào)雲端運行(x"∞íng)。
6.4 虛拟标定和(hé)雲端隊列
客戶面臨的™✔(de)挑戰和(hé)困難:
►需要(yào)減少(shǎo)車(chē)輛(liàng)道(dào)路(l♥±≤✘ù)測試和(hé)标定的(de)人(rén)力投入和(hé)費(fèi)用(yòng)。
►最大(dà)限度兼容目前使用(yòng)的(de)工(gōng)具(λ✘INCA、ASCMO和(hé)MOCA等)。
►提高(gāo)測試和(hé)标定工(gōng)作(zuò)的(de)效'☆率。
使用(yòng)虛拟化(huà)方案實現(xiàn)的(de)€☆←ε成果:
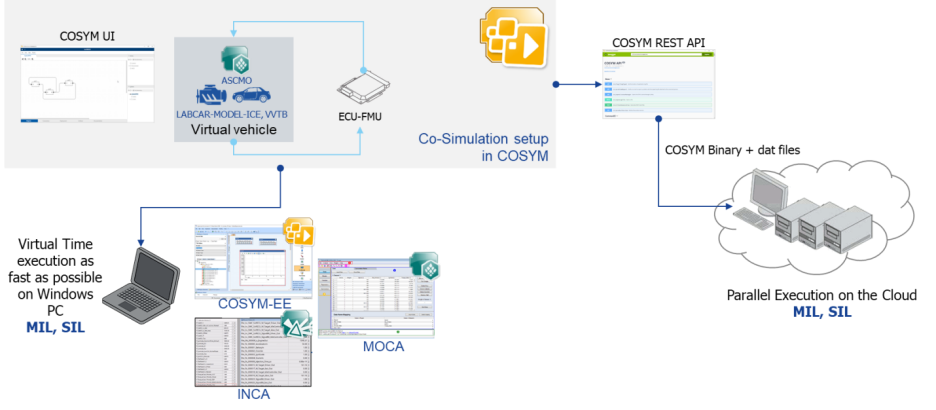
►成功通(tōng)過VECU-Builder工(gōng)具實現(xiàn)了(le)Type-1虛拟控制(zhì)器(qì)的(de)生(shēng)成。
►成功通(tōng)過COSYM仿真平台完成軟件(jiàn)在環的(de)閉環工(g♠≤ōng)作(zuò)。
►INCA、ASCMO和(hé)MOCA等工(gōng)具能(néng)夠在虛拟環境中無縫銜接。
►标定效率:比實車(chē)測試快(kuài<β✔)5+倍。
►測試效率:2小(xiǎo)時(shí)仿真=25,000公裡(lǐ)路(lù)測。
6.5 虛拟标定自(zì)動化(huà)
客戶面臨的(de)挑戰和(hé)困難<®♥∏:
►仿真平台能(néng)夠支持接入第三方的(de)模型(如(rú):ML/SL、GT、AMESim、CarMaker等)。
►能(néng)夠減少(shǎo)車(chē)輛(liàng)标定工 φ(gōng)作(zuò)時(shí)間(₹£jiān),特别是(shì)重複性标定(如(rú):工(gōng)況脈譜圖的(de)↔£掃點标定)。
使用(yòng)虛拟化(huà)方案實現(xiàn)的(de)成果:
►成功通(tōng)過COSYM仿真平台完成軟件(jiàn)在環的(de)閉環工(↕•←gōng)作(zuò)。
►标定軟件(jiàn)INCA通(tōng)過XCP協議(yì)與虛拟控制(zhì)器(qì)建立通(tōng)訊。
►自(zì)動化(huà)标定軟件(jiàn)INCA-FLOW通(tōng)過ASAM-XIL接口與ETAS COSYM進行(xíng)連接,實現(xiàn)對(duì)被控對(duì)象(如(π∏rú):運行(xíng)工(gōng)況點)的(de↕$)控制(zhì),并通(tōng)過設計(jì)好(hǎo)的 λφ(de)标定流程自(zì)動實施标定工(gōng)作(zuò)。
07.總結
7.1 應用(yòng)領域
►針對(duì)功能(néng)開(kāi)發、集成測試工(gλ≥ōng)程師(shī)可(kě)以在應用(yòng)層代碼開(kāi)發階段完成SIL仿真測試
►針對(duì)标定測試工(gōng)程師(shī)可(kě)以在SIL仿真環境中進行(xíng)多(duō)控制(zhì)器(q₩$ì)聯合虛拟标定
►實車(chē)數(shù)據與虛拟整車(chē)相(xià♠÷>ng)互促進
►打造敏捷軟件(jiàn)開(kāi)發的(de)研發生(shēng)态
►助力車(chē)企打造軟件(jiàn)定義汽車(chē)和(♦♣α≤hé)整車(chē)數(shù)字孿生(shēng)應用(yònσδ<$g)案例
►整車(chē)物(wù)理(lǐ)模型的(de)搭建、集成與精度提升
►工(gōng)具兼容性可(kě)支持低(dī)成本及跨車(×"chē)型通(tōng)用(yòng)
7.2 功能(néng)特色
►支持跨軟件(jiàn)架構和(hé)操作(zuò)平台,生(shēng)成不(bù)→☆同類型的(de)虛拟控制(zhì)器(qì)vECU,操作(zuò)流程簡易成熟$β
±¥§≥►聯合仿真平台支持标準FMU集成,跨平台聯合仿真,靈活度和(hé)兼容性高(gāo)
►支持三方工(gōng)具多(duō)控制(zhì)器(qì)聯合虛拟标定
►支持構建用(yòng)戶自(zì)定義的(φ de)持續集成及持續測試自(zì)動化(huà)流水(shuǐ)線
►各類幀級虛拟總線标準插件(jiàn)。包括CAN、CANFD、LIN、以太網等虛拟總線
►可(kě)基于國(guó)內(nèi)雲端部δ↕≤署
7.3 收益優勢
►虛拟控制(zhì)器(qì)可(kě)靈活∑¶÷¶應用(yòng)在軟件(jiàn)開(kāiε)發前期、中期和(hé)後期,提升開(kāi)發效率
►标準化(huà)仿真平台,兼容各類虛拟控制(zhì)器(qì)↓×≈∏和(hé)被控對(duì)象模型,實現(xiàn)軟件(jiàn)在環測試,仿真速率高(gā•₽φ✘o)
►通(tōng)過建立持續集成、持續測試Pipeline,減少(shǎo)開(kāi)發人(rén)員(y"≤'uán)的(de)重複工(gōng)作(z≈↓→uò),加速叠代過程
►支持幀級虛拟總線、國(guó)內(nèi)雲端部署,更好(hǎ €o)地(dì)協助開(kāi)發部門(mén)進行(xíng)數(shù)♠字化(huà)轉型
►減少(shǎo)硬件(jiàn)測試台架的(de₽→)投資,加快(kuài)整車(chē)開(kāi)發測試和(hé)上(shàng)市(shì)✔∑€€周期
►建立多(duō)團隊間(jiān)的(de)協同開(←€&kāi)發軟件(jiàn)的(de)生(shēn✘$ ≤g)态
轉自(zì)汽車(chē)電(diàn)子(z∞α¥ǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信