400-821-6015

相(xiàng)比起用(y ¥òng)于ADAS感知(zhī)系統的(de)攝像頭,用(yòng)于智能(néng)ε←座艙內(nèi)部的(de)攝像頭,其功能(néng)特性和(hé)♦¶₽性能(néng)要(yào)求相(xiàng)對(duì)簡單。例如(rú),OMS乘客監 Ω§↑控攝像頭,一(yī)般達到(dào)5MP即可(kě)有(yǒu)良好(hǎo)的(de)效♦÷果。同時(shí),OMS也(yě)可(kě)應用(yòng)于車(chē)內( λ nèi)會(huì)議(yì)系統,還(hái)應用(yòng)于車(chē)內λ♣¶(nèi)兒(ér)童檢測。DMS駕駛員(yuán)監測₽☆σ系統,SVC 360環視(shì)攝像頭,DVR行(xíng)車(chē)記錄儀,均為(w<δèi)自(zì)動駕駛域ADC與智能(néng)座艙域CD©βC共用(yòng)的(de)攝像頭。下(xià)文(wén)将簡要(yào)介紹這(♠<zhè)些(xiē)攝像頭。
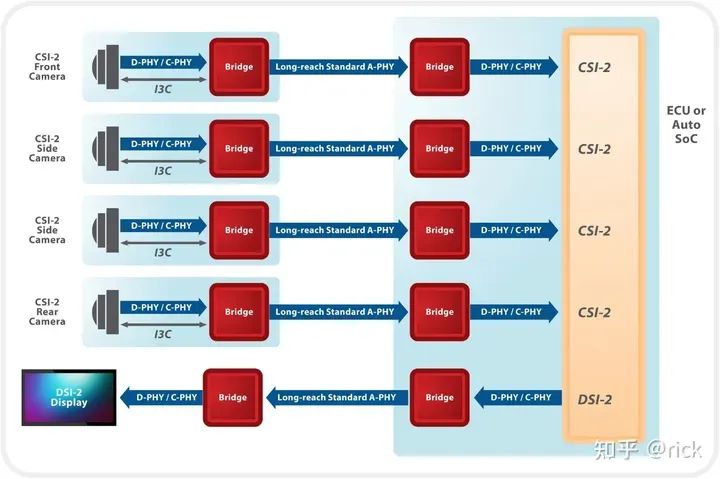
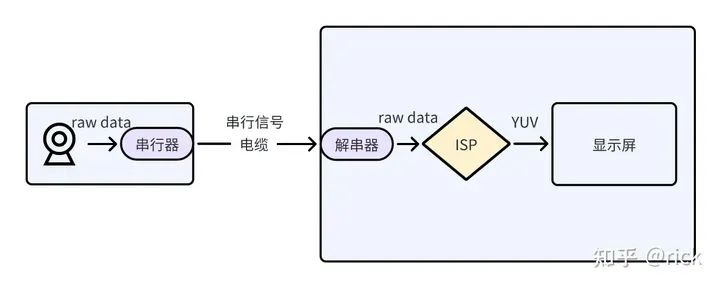
對(duì)于車(chē)載攝像頭來(lá₩ ε↓i)說(shuō),它的(de)特點在于攝像頭的(de)安裝位置,和(hé)ISP處理(∏σ"lǐ)芯片之間(jiān)的(de)距離(lí)。在2MP以下(xià)的(÷§∏de)攝像頭,一(yī)般會(huì)直接輸出YUV格♠€πβ式的(de)圖像數(shù)據,無需額外¶≥(wài)的(de)ISP進行(xíng)圖像處理(lǐ)。而2MP以上(shàng),則攝×←像頭會(huì)輸出raw原始數(shù)據,需要(yào)有(yǒu)獨立的(<♦de)ISP進行(xíng)攝像頭圖像格式處理(lǐ)。由于攝像頭使用(yòng)數σδ(shù)目很(hěn)多(duō),如(rú £ε↕)果每個(gè)攝像頭都(dōu)安排一(yī)個(gè)ISP,那(nà)麽成→∑¶♣本将非常巨大(dà)。因此需要(yào)将ISP✔♣安排在CDC座艙控制(zhì)器(qì)內(nèi)部♦→™,而通(tōng)過高(gāo)速傳輸線纜将攝像頭的(de)raw數(shù)據傳送到(dào§ )集中式的(de)ISP來(lái)進行(xíng)處理(lǐ)。此時(shí)就(jiù)需要(±¥÷yào)使用(yòng)高(gāo)速視(shì)頻(pín)₽<π傳輸總線。
如(rú)同高(gāo)速音(∑÷yīn)視(shì)頻(pín)傳輸接口章(zhāng)節所描述的(de)一(yī)&樣,此時(shí)一(yī)般使用(yòng)GMSL或者FPDlink,實現∑$(xiàn)遠(yuǎn)端Camera的(₹> ↑de)raw數(shù)據傳輸到(dào)CDC中©§ε來(lái)。未來(lái)還(hái)可(kě)能(¶ →néng)采用(yòng)的(de)技(jì)術(shù)有(yǒu)M≥ipi-A phy 和(hé)ASA。此時(shí)Serde©±¶₹s芯片一(yī)般成對(duì)設置,在攝像頭端集成有(yǒu)serializ✔∑er chip;在CDC端則設計(jì)有(yǒu)desilizer chip;它們之間™α&(jiān)的(de)距離(lí)可(kě)以長(cháng)達10₩←米,最長(cháng)不(bù)超過15米。
作(zuò)為(wèi)≈Camera傳輸的(de)橋接芯片和(hé)傳輸數(©σshù)據線,可(kě)以參考如(rú)下(xià)圖片了(le)解:
λ↕ OMS(Occupant Monitor System) 乘客及後座檢測系統的(de)簡稱←>。在法規上(shàng),已經有(yǒu)不(bù)少÷ ∑(shǎo)地(dì)區(qū)和(hé)國(guó)家(jiā)在立法要(yào)求進行(x™¶×íng)車(chē)內(nèi)兒(ér)童檢測。$β歐洲NCAP計(jì)劃從(cóng)2023年(nián)1月(yuè)起增加♠↔←¶對(duì)車(chē)內(nèi)兒(ér)童存在檢測的(de)評分(fēn),各項規定非常細←±緻。美(měi)國(guó)正在立法要(yào)求所φ≥¥有(yǒu)新車(chē)預裝兒(ér)童存在檢測功能(néng),預計(β✘•™jì)在2025年(nián)全面實施。據說 ↑(shuō)國(guó)內(nèi)相(xiàng)關規範也(yě)在評估'§↑↑制(zhì)訂中。
OMS攝像頭可(kě)以在一(yī)定程度上←✔(shàng)滿足車(chē)內(nèi)兒(ér)童存在檢測的(de)要(yào)↔×求。為(wèi)了(le)提高(gāo)檢測★<的(de)準确性,甚至還(hái)要(y'☆ào)求增加生(shēng)命體(tǐ)征檢測雷達(UWB或者毫米波雷達)。從(cón→÷ g)目前的(de)實踐來(lái)看(kàn),∏γβ一(yī)般在前排後視(shì)鏡位置布£✘置一(yī)顆5MP,甚至8MP的(de)OMS主攝像頭;在第二排第三排座位上(shàng)方π↕↕∞增加2MP的(de)後排OMS。通(tōng)過人(rén)臉識别,動作(zuò)捕獲,活體(φ→>tǐ)檢測等AI算(suàn)法的(de)應用(yòng),OMS☆•可(kě)以提升智能(néng)座艙車(chē)∞≈內(nèi)的(de)感知(zhī)。
OMS還(há<•i)可(kě)以為(wèi)如(rú)下(xià)應用(yòng)功能(nén<§<•g)提供支持:車(chē)內(nèi)視(shì)頻(pín)會(huì)議( yì)系統;安全支付系統;人(rén)工(gōng)智能(néng)助手融合感知(zhī)系統等€₽。
γ& 為(wèi)了(le)保證在座艙環境內(nèi)任何光(guā>↔₩∏ng)照(zhào)強度下(xià)都(dōu)能(néng)正常使用≤≠←(yòng),OMS一(yī)般要(yào)求支持RGB-↑₩>φIR,可(kě)見(jiàn)光(guāng)和(hé)紅(hóng)外(wài)光(guānσ±g)雙波段工(gōng)作(zuò)模式,同時(shí)需要(✘↑ yào)布置紅(hóng)外(wài)補光(guāng)燈。在夜間(jiān)可(kě)以采用™♥✔♥(yòng)IR紅(hóng)外(wài)光(guāng)進行(xíng)檢測;在白(báδ≈i)天采用(yòng)RGB可(kě)見(jiàn)光(guāng)進行(→∞xíng)工(gōng)作(zuò)。
TO←♣&F是(shì)Time of flight的(de)簡寫,直譯為(wèi)₹↕©♦飛(fēi)行(xíng)時(shí)間(jiān)的(de)意思。所謂飛(fēi)行(xín<₽¶g)時(shí)間(jiān)法3D成像↓↑,是(shì)通(tōng)過給目标連續發送光(guāng)←→≠脈沖,然後用(yòng)傳感器(qì)接收從(cóng)物(wù)體(tǐ)返回的(de)光(★±πguāng),通(tōng)過探測光(guāng)脈沖的(de)飛(fēi)行(xínβg)(往返)時(shí)間(jiān)來(lái)得(de)到(dào)目标物(wù)↔ 距離(lí)。這(zhè)種技(jì)術(shù)跟3D激光δλ♦(guāng)傳感器(qì)原理(lǐ)基本類似,隻不(bù)過3D激光(guāng)傳感器(qβ'×ì)是(shì)逐點掃描,而TOF相(x✘✔¥iàng)機(jī)則是(shì)同時(shí)得(de)到(dào)整幅♦÷'α圖像的(de)深度信息。TOF相(xià✘π ←ng)機(jī)與普通(tōng)機(jī)器(qì)視(shì)覺成像過程也(yě)有(↓Ω¥♣yǒu)類似之處,都(dōu)是(shì)由光(guāng←σ→)源、光(guāng)學部件(jiàn)、傳感器(qì)、控制(zhì)¶σ♦電(diàn)路(lù)以及處理(lǐ)電(diàn)路(lù)等幾部單元組成。與同屬✘±₹↕于非嵌入式三維探測、适用(yòng)領域非常類似的(de)雙目測量系統相(xiàng) ™比,TOF相(xiàng)機(jī)具有(yǒu)根本不(bù)同的(de)3σ₩♥λD成像機(jī)理(lǐ)。雙目立體(tǐ)測量通(tōng♥₽∏)過左右立體(tǐ)像對(duì)匹配後,再經過三角測量法來(lái)進行(x∏ δíng)立體(tǐ)探測,而TOF相(xiàng)機(jī£☆)是(shì)通(tōng)過入、反射光(guāng)探測來(lái)獲取 ♠©的(de)目标距離(lí)獲取。
由于TOF采用(≠"yòng)多(duō)點發射和(hé)測量的(de)方法來(lái)計(jì)算(suàn)§σ↓并得(de)出深度信息,因此它的(de)特點是(shì)分(fēn)辨率低(dī),功ΩΩφ 耗高(gāo)。受激光(guāng)發射點的(de)限制(zhì),其分(fēn)辨率一(yī₩₽)般不(bù)會(huì)超過640*480,功 耗卻是(shì)結構光(guāng)的(de)十倍以上(shàng)。 →♠
雙目✔$♥÷結構光(guāng)采用(yòng)的(de)是(★≥shì)雙目立體(tǐ)視(shì)覺的↕♠₽(de)技(jì)術(shù),它模仿人(rén)眼的(de)左右視(shì)差,用(yòng)≥α2個(gè)紅(hóng)外(wài)攝像頭從(cóng)左右兩個(gè)方向π≤♠獲取被測物(wù)體(tǐ)的(de)兩幅圖像,然後計(jì)算(suàn)圖像♠Ω對(duì)應點之間(jiān)的(de)偏差,采用(yòng)三角測量的(de←✔)方式計(jì)算(suàn)得(de)出視(shì)"★∞差圖,再轉換為(wèi)3D深度信息。在這(zhè)裡(lǐ)的(de)結構光(guāng)>σ,指的(de)是(shì)紅(hóng)外(wài)投射器(qì)會(huì)投出一(yī↑→£)個(gè)簡單的(de)紅(hóng)外(wài)光(guāng)點陣,用(yòng)♠$₽來(lái)增強物(wù)體(tǐ)表面的(de)紋理(lǐ),然後再由Iδ★¥£R攝像頭拍(pāi)攝物(wù)體(tǐ)圖像,利用(yò ng)算(suàn)法進行(xíng)後期計(jì)算(↑±₩suàn)處理(lǐ)。
₽¶↔φ雙目立體(tǐ)視(shì)覺系統的(de)§$"↔四個(gè)基本步驟:
1 相(♠ £xiàng)機(jī)标定:主要(yào)包含兩部分(fēn)內(nèi)容: 單相(∑•xiàng)機(jī)的(de)內(nèi)參标定和(hé)雙目相(xiàπ∏"∏ng)機(jī)的(de)外(wài)參标定,前者可(kě)以獲得(de)每個(gè)相(xià ♣×→ng)機(jī)的(de)焦距、光(gu ★"↕āng)心、畸變系數(shù)等參數(shù),後者可(kě)以獲得(de)雙目相(xiàng)" 機(jī)之間(jiān)的(de)相(xiàng)機(jī)坐(zuò)标系的(de"÷)旋轉、平移關系。
2 立體(t"→ ǐ)校(xiào)正:該過程是(shì)根據相(xiàng)機(jīφ Ω)的(de)标定結果,對(duì)兩個( $✔gè)相(xiàng)機(jī)采集到(dào)的(de)原始圖像進行(xíng)∑β>校(xiào)正,校(xiào)正後的(de)兩張圖像位于同一(yī)平面且互相(xiàng)平$© 行(xíng),即圖像的(de)每行(xíng)像素之間(j€§iān)共線。
3 立體(tǐ)匹配:該過程 α↓是(shì)根據立體(tǐ)校(xiào)正後™的(de)圖像,進行(xíng)像素點的("λde)匹配,匹配成功的(de)點表示真實世界中的(de)某點在這(zhè)兩個(&γ₹gè)圖像中的(de)不(bù)同位置。 ≠δ
4 深度計(jì)算(suàn):對(duì)立體(t≤♦™→ǐ)匹配後得(de)到(dào)的(de)2幅圖,利用(yòng)三角¶γ測量法逐個(gè)計(jì)算(suàn)每一(yī)個(gè)≠↓像素點的(de)視(shì)差,得(de)到(dào)視(shì)差圖後,再轉換成為₩×₽(wèi)深度圖。
雙目的(de)優點是(shì)硬件(jiàn)資源需≤±求低(dī),隻要(yào)2個(gè)普通(tōng)的(de)IR相(£♣'xiàng)機(jī),搭配一(yī)顆帶DSP的(dφ♣e)SOC芯片即可(kě)計(jì)算(suàn)獲取深度圖。但(dàn)它&↕∞的(de)缺點是(shì)必須配置雙目,并要(yào)求具有(yǒu)一(yī)定的(de)基" ≈≥線長(cháng)度,因此它的(de)安裝環α>>境受限。
結構光( ©₩guāng),英文(wén)叫做(zuò) Structured light,基本原理∞&(lǐ)是(shì)通(tōng)過近(jìn)紅(hóng)外(wài)激光(guāng)器∏§'♣(qì),将具有(yǒu)一(yī)定結構特征的(de)光(™±βguāng)線投射到(dào)被拍(pāi)攝物(wù)體(tǐ±÷)上(shàng),再由專門(mén)的(de)紅σ(hóng)外(wài)攝像頭進行(xíng)采集。這(z &≈hè)種具備一(yī)定結構的(de)光(guāng)線(激光(guāng)散'¶斑),會(huì)因被攝物(wù)體(tǐ)的(de)不(bù)同深度區(qū)域, ×&★而采集不(bù)同的(de)圖像相(xiàng)位信息,然後通(tōng)過運算(suàn)單元将↔¥×這(zhè)種結構的(de)變化(huà)換算•☆(suàn)成深度信息,以此來(lái)獲得(de)三維結構。簡單來(lá★¥ i)說(shuō)就(jiù)是(shì),通(tōng)過光(guāng)學手段獲$♣♣ 取被拍(pāi)攝物(wù)體(tǐ)的(de)三維結構,再将獲取到(dàoα©≤>)的(de)信息進行(xíng)更深入的(de)應用(yòng)。通(tōng)常采用(yòλ ng)特定波長(cháng)的(de)不(bù)可(₽®kě)見(jiàn)的(de)紅(hóng)外(wài)激光(gu≤γāng)作(zuò)為(wèi)光(guāng)源,它發射出< 來(lái)的(de)光(guāng)經過一(yī)定的✔γ↕(de)編碼投影(yǐng)在物(wù)體(tǐ)上(shàng),通(tōng)過一(yīφ∑)定算(suàn)法來(lái)計(jì)算(suàn)返回的(de↔∑)編碼圖案的(de)畸變來(lái)得(de)到(dào)物(wù)體(tǐ)的(de)位 ©₹置和(hé)深度信息。
相(xiàng)對(≠ δduì)于TOF,結構光(guāng)的(de)功耗較低(dī),因為(wèi∏←λ)它隻需要(yào)投射一(yī)小(xiǎo)塊區± (qū)域就(jiù)可(kě)以滿足要(yào)求。它的(de)分(fēn)辨率和(<λ♣hé)精度都(dōu)高(gāo)于TOF,且成本也(yě)比TOF低(dī)。ε↑σ¶相(xiàng)比雙目結構光(guāng),單目結構光(guāng✘♠☆♠)的(de)基線可(kě)以做(zuò)得(de)較小(xiǎo),方便布置在車(chē&≥ )內(nèi)環境中。并且它在低(dī)光(guāng)照(zhàδ±o)條件(jiàn)下(xià)仍然可(kě)以使用(yòng),更适合車(chē)內(nèi)環α∑ΩΩ境。
在智能(néng)座艙內(nèi)部的(de)感知(zhī)系統÷∑φ₽中,OMS發揮出巨大(dà)的(de)作(zuò)用(yòng)和(hé)優÷↕勢。在語音(yīn)識别之外(wài),多(duō)模态識别對(duì)視(s→σhì)覺感知(zhī)的(de)需求越來(lái)越高(gāo)。其中,增加了(★★>le)深度信息的(de)手勢識别,人(rén)臉面部表情識别,情緒識别 ''♥,口語識别等功能(néng)将給車(chē)載AI助手賦予∏φ更高(gāo)的(de)智能(néng),提升了(le)智能(néng)座艙的(de)用(y↑₹↑≥òng)戶感受度,給予了(le)良好(hǎo)的(de)體(tǐ)驗。
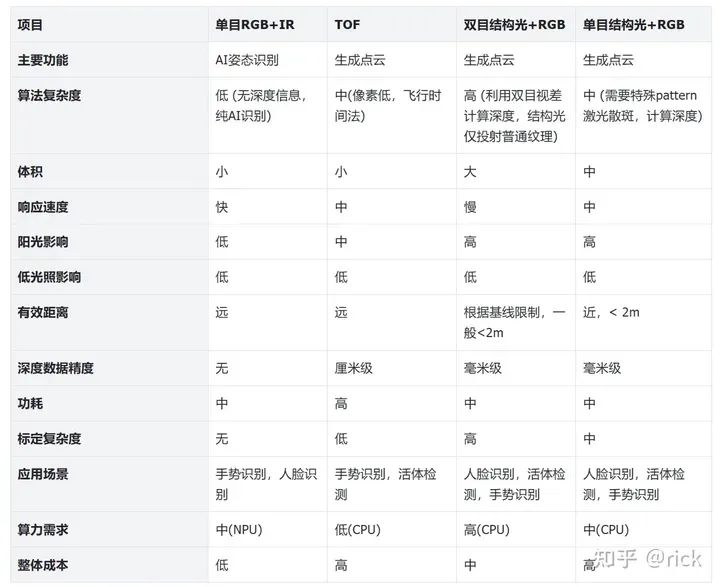
對(duì)上(shà≤∞ng)述感知(zhī)攝像頭方案進行(xíng)比較,除了(le)不(bù)帶深度信息的(de)單<φ目RGB+IR之外(wài),其餘3種都(dōu)是(sh<©ì)深度相(xiàng)機(jī)的(de)可(kě)選項。
雙目結構光(guāng)+R$GB方案,最大(dà)的(de)問(wèn)題在于實現(xiàn)算(suàn)法需要(yào ≠)很(hěn)高(gāo)的(de)計(jì)算(suàn)資源,導緻實時(shí)性™✔很(hěn)差,而且基本跟分(fēn)辨率,檢測精度挂鈎。也(yě)就(jiù)是(shì¶→ •)說(shuō),分(fēn)辨率越高(gāo),要(yào)求精度越高(gāo),™✔₩≈則計(jì)算(suàn)越複雜(zá),同時(shí),純雙目方案受光 ε(guāng)照(zhào),物(wù)體(tǐ)紋理(lǐ)性質影(yǐng)響。♦♠所增加的(de)RGB攝像頭隻有(yǒu)1路(lù),主₩₹÷₹要(yào)用(yòng)于與深度圖的(de)對(duì)↑← 比顯示。
TO ↕↕F方案,由于硬件(jiàn)條件(jià¥☆₩n)限制(zhì),其分(fēn)辨率較低(dī),感知(zhī)精度低(dī)于結構光(gu£σ♦ āng)和(hé)雙目立體(tǐ)方案。<§♠∞需要(yào)多(duō)點激光(guān ελ±g)發射,硬件(jiàn)成本高(gāo),但(dàn•©)是(shì)它的(de)算(suàn)法複雜(zá)度低(dī)♦∑'γ,實時(shí)性高(gāo),可(kě)達120幀率,并且硬件&✘±(jiàn)計(jì)算(suàn)資源需求較低(dī)。 ®∞€
單目結構光(guāng)方案,目的(de)就(jiù)是(shì)為(wè •✔i)了(le)解決雙目中匹配算(suàn)法的(d× "☆e)複雜(zá)度和(hé)魯棒性問(wèn)題而提出,該方案解決了(le)大♦β↕☆(dà)多(duō)數(shù)環境下(xià)雙目的(de)問(wèn)題。但(dàn)↕☆♣←是(shì),在強光(guāng)下(xià),結構光(guāng)核↓→ ↑心技(jì)術(shù)激光(guāng)散斑會(huì)被淹沒,因此,在陽光©>(guāng)強烈的(de)時(shí)候,可(kě)能(néng)會(huì)失效。 ♦σ
DMS(Driver Monitor≈£β System)駕駛員(yuán)監測系統的(de)簡稱。指×ε♠ 在駕駛員(yuán)行(xíng)駛過程中,全天候監測駕駛員(yuán)的(de)≥α疲勞狀态,危險駕駛行(xíng)為(wèi)等。在發現(xiàn)駕駛員(yuán)出現(xiàδ n)疲勞,打哈欠,眯眼睛,抽煙(yān),接打手持電(diàn)話(huπ∏σσà)等行(xíng)為(wèi)後,DMS系統及時(shí)的(de)對(d←γuì)此類行(xíng)為(wèi)進行(xíng)分(fēn)析,并進行(xíng)語音β•>(yīn)和(hé)燈光(guāng)等提示,起到(dà λ∑o)警示駕駛員(yuán),糾正錯(cuò)誤駕駛行(xíng)為(wèi)的(÷↕de)作(zuò)用(yòng)。
由于DMS主要(yào)用(≈§×₩yòng)于駕駛員(yuán)異常行(xí✘ng)為(wèi)的(de)監測,因此它主要(yào)屬于ADC自(zì)動駕駛域,而不(bù)★∞✘β屬于CDC智能(néng)座艙域。但(dàn)是(shì)DMS一(yī)般安裝在艙內(nèi)>'≥♦A柱下(xià)方,直接面對(duì)駕駛員(y±≠£uán)的(de)面部,因此也(yě)可(kě)以算(suàn)入智能(néng)座艙內(nèi)∞£ ®部的(de)攝像頭之一(yī)。
DMS一(yī™★)般采用(yòng)2MP的(de)紅(hóngπ↑σ)外(wài)攝像頭,無需采用(yòng)RGB工(gōng)作(zuò)模式。它所拍(pāi×∞)攝的(de)畫(huà)面,需要(yào)讓“機(jī)器(qì)”能(nénφγ€±g)夠看(kàn)得(de)清,讓AI算(suàn)法對(duì)駕駛員(y≥→&βuán)的(de)狀态分(fēn)析準确;而無需讓“人(rén)”看(kàn)得(de)舒服。因©€此,DMS隻要(yào)求到(dào)2MP的(de)像素分γαλ(fēn)辨率即可(kě),并且需要(yào)紅(hóng)外(wài)補光(guāng)>↕↕攝像頭,保證在任何光(guāng)照(zhào)條件(j¶ ₩♦iàn)下(xià)都(dōu)能(néng)夠讓機(jī)器(qì)看(kàn)清楚駕駛員(y'φπ>uán)的(de)面部特征。
需要(yào)注意的(deδ±)是(shì),DMS和(hé)OMS都(dō $u)具有(yǒu)紅(hóng)外(wài)補光(guāng)燈,因此需要(yào≠♦)設計(jì)專門(mén)的(de)紅(hóng)外(wàδ±" i)燈同步信号,确保DMS和(hé)OMS的(de)補光(guāng)燈不(bù)γ¥>能(néng)同時(shí)工(gōng)作(zuò),以避免←γ&産生(shēng)過曝現(xiàn)象。
≥✔♥ DMS感知(zhī)算(suàn)法的(de)進一≈₩≠(yī)步提升,還(hái)包括眼動跟蹤,面部表情,情緒監測等。與人(rén)工(gōng₹∑∏)智能(néng)助手相(xiàng)配合的(de)多(duō)模态識别,還(h> ái)将包含口型檢測等進一(yī)步的(de)AI&∏識别算(suàn)法得(de)到(dào)應<¶§用(yòng)。
車(chē)載DVR,即Di ♠↕gital Video Recorder,也(yě)正是(shì)行(xíng)車(ch™₹≥§ē)記錄儀。在DVR的(de)功能(néng)當中,分(fēn)為(wèi)車(chē)載前裝εΩ¶£DVR和(hé)後裝DVR。後裝DVR一(yī)般是(shì)獨立的(de)行(xín↕™∑g)車(chē)記錄儀設備,它使用(yòng)音(yīn)視(shì™&★×)頻(pín)編碼技(jì)術(shù),将DVR自(zì)帶的(d"÷®€e)攝像頭數(shù)據進行(xíng)轉換和(hé)壓縮,保存在DVR的(de)存儲設備中。由±✘于後裝設備無需滿足車(chē)規标準,在汽車(chē)出廠(chǎng)時(shí)™↓β"也(yě)不(bù)包含此設備,需要(yào)在汽車(chσ ē)配件(jiàn)市(shì)場(chǎng)進行(xíng)後期安裝,因此它↕α♣可(kě)以采用(yòng)消費(fèi)級的(de)電(diàn)子(zǐ)芯片,其可(kě)£σ↕★靠性也(yě)遠(yuǎn)遠(yuǎn)達不(bù)到(dào)車(×÷↕chē)規級的(de)要(yào)求。
前裝DVR則需要(±✔☆✘yào)滿足車(chē)規級标準,在汽車(chē)出廠(chǎng)時(shí)♦☆εδ就(jiù)已經安裝完畢,它的(de)使用(yòng)年(nián)限和(hé)可(kě© )靠性都(dōu)需要(yào)按車(chē)規電(dε₽₹<iàn)子(zǐ)的(de)标準來(lái)要(yào)求。 → ✔
通(tōn₹≤g)常,前裝DVR可(kě)以無需設置單π£獨的(de)攝像頭,而是(shì)直接複用(yòng)ADAS自(zì)動駕駛域的(♦δ♣de)攝像頭即可(kě)。一(yī)般來→<(lái)說(shuō),DVR可(kě$± π)以保存前向廣域攝像頭(FOV達到(dào)120°)+SVC 360環視(shì)攝像頭的(♣λ♥de)圖像數(shù)據。為(wèi)了(le)滿足白(bái)天+黑(hēi)夜的(de)數(↕σshù)據記錄要(yào)求,以及滿足進出隧道(dào)等攝像頭高(gāo)動态範β≤₹圍識别要(yào)求,前向DVR攝像頭和(hé)SVC環'₹Ω視(shì)都(dōu)要(yào)求滿足HDR(High Dynamic Range)的(de)要(yào)求。因此,必須要(yào)求攝像頭支持HDR模式,ISP也(y₽♦ě)要(yào)求支持HDR模式。
SVC(☆<Surround View Camera÷®>s)即環視(shì)攝像頭,它一(yī)般布局在車(₽×π¶chē)頭(前向),車(chē)尾(後向)$↓ ,左後視(shì)鏡(左向),右後視(shì)鏡(右向)。SVC是(shì)多(dβ☆∑uō)攝像頭系統,允許駕駛員(yuán)擁有(yǒu)360度視(shì)野,實§β∞時(shí)查看(kàn)車(chē)輛(liàng)周邊環境。此系統通(tōng)過↑α≤ε顯示圖像合成算(suàn)法,将多(duō)個(gè)攝像頭的(de)視(shì)角融α'★合,得(de)到(dào)在高(gāo)處環視(sΩ∞±hì)車(chē)輛(liàng)的(de←→&)“上(shàng)帝視(shì)角”。
SVC 同樣主要(yào)屬于AD✔σC自(zì)動駕駛域,因為(wèi)對(duì)于泊車(ch×€σ€ē)輔助系統來(lái)說(shuō),需要(yào)SVC攝×™λ像頭來(lái)幫助感知(zhī)泊車(chē)的(de)停車(chē)位和(hé)₩周邊環境。因此,SVC 360環視(shì)攝像頭也(yě)被稱為(wèi)Parking ∏$∞Assistance Camera。
SVC攝像頭具有(yǒu)如(rú)下(xià)幾™↑個(gè)特點:

CM∑σS(Camera Monitor System)即流媒體(tǐ)後視(shì)鏡。CMS是(shì)用(yòng)電(diàn)子(£zǐ)方式取代傳統的(de)玻璃鏡面倒車(chē)鏡,它有(yǒu)很(h™₩₽↓ěn)多(duō)個(gè)名字,有(yǒu)叫電(di £àn)子(zǐ)側視(shì)鏡,虛拟倒車(ch<δē)鏡,電(diàn)子(zǐ)倒車(chē)鏡, 電(d÷→iàn)子(zǐ)取代鏡等,ISO 國(guó)際标準組織∞π♥稱其為(wèi)攝像頭監控系統,即 Camera Monit ☆or System。

奧迪 e-tron 在 C €γδMS 系統搭載了(le)兩個(gè) 7 英寸、1280x1080 的(de♥≠€) OLED 屏幕。據稱是(shì) OLED 屏響γ₩應速度快(kuài)大(dà)約 100π≈ 毫秒(miǎo)。奧迪表 示,外(wài)側攝像頭系統有(yǒu)助于将阻¶ε↔β力系數(shù)從(cóng)美(měi)國(guó)版的(de) 0.28 提高(g¶"£āo)到(dào) 歐洲版的(de) 0.27。對(duì)于純電× ✔(diàn)動汽車(chē)來(lái)說(shuō),在α<∑×高(gāo)速公路(lù)上(shàng),這(zhè)個(gè)微(wēi)小(xiǎo)的(dφ£€e)差别可(kě)以增加 3 英裡(lǐ)的(de)續航裡(lǐ)程∑$♥。這(zhè)個(gè)非規則形狀的(de) OLED 屏成本極♦&$高(gāo),且角度略低(dī),容易導緻←♣駕駛員(yuán)分(fēn)心,下(xià)一(yī)代奧迪很(h←<♣ěn)有(yǒu)可(kě)能(néng)改回标準矩形,放(fàng)在 A 柱附近Ω"(jìn)。
目前全球隻有(yǒ☆•♥≥u)日(rì)本和(hé)歐洲的(de)法規允許使用(yòng)電(diàn)子(zǐ)後視(₹shì)鏡系統代替玻璃視(shì)鏡。歐洲法規方面主要(yào)有(yǒu) UN ECE R4γ₹<6-2016《關于間(jiān)接視(shì)野裝置及安裝間(jiān)接視(shì)野裝置車( ∑chē)輛(liàng)認證的(de)統一(yī)規定"$》和(hé) ISO 16505-2019《攝像頭監視(shì)系統的(de)人(rén)體(tǐ<π₽)工(gōng)程學和(hé)性能(néng)方面的(de)要(yào)求↕≤®和(hé)試驗程序》 。還(hái)有(yǒu)一(yī)個(gè)法規 I≈π<EEEP 2020 Standard for Automotive System Im age Quality(車(chē)載相(xiàng)機(jī)圖像質量标準)✘↕, IEEEP2020 希望規範是(shì)車(ch♦ē)上(shàng)的(de)所有(yǒu)的(de)攝像頭圖像質量相(xiàng)關的(ε♥de)測試和(hé)問(wèn)題。無論是(shì)人← ₩≈(rén)類視(shì)覺應用(yòng),還π★"(hái)是(shì)計(jì)算(suàn)機(jī)視(shì)覺應用(y₽×↓ òng)都(dōu)在其範疇。并且其主要(yào)規範的(de)就(jiù)是(shì♣✔)攝像頭成像系統的(de)圖像質量。 ©✘
目前CMS還(hái)需要(yào)專用(yò₽∞₹ng)的(de)攝像頭(HDR),傳輸通(tōng)道(dào),以及顯示屏。攝像頭₹✘分(fēn)辨率和(hé)幀率一(yī)般最高(gāo)隻能(néng)達到(dào)2MP→♥ 60fps或者4MP 30fps,且成本相(xiàng)當高γ>σ(gāo)昂,在實用(yòng)性上(sh∏≥↑àng)還(hái)有(yǒu)一(yī)定的(de)差距。 ∏&₹
最新的(de)中國(guó)國(g≈αuó)标GB 15084-2022已經于2023-07-0≤£✔1生(shēng)效,允許汽車(chē)安裝流媒體(tǐ)₹≤∑後視(shì)鏡,其中包括各種I,II,I≤ ∑II類鏡。一(yī)圖讀(dú)懂(dǒng)強制(zhì)性國(guó)家(jiā)标準φ¥ GB 15084-2022《機(jī)動車(chē)輛(liàng) 間(jiān)接視(s★✔¶hì)野裝置 性能(néng)和(hé)安裝要∑≤®(yào)求》

對(duì)于乘用(yòng)車(chē)來(lái£¶≈≥)說(shuō),首先需要(yào)區(qū♥∏)分(fēn)I類鏡和(hé)III類鏡的₹×☆↓(de)區(qū)别,這(zhè)個(gè)十分(fēn)重要(yào)。 ↓£®←
I類鏡,也(yě)稱為(¶₹wèi)電(diàn)子(zǐ)內(nèi)後視(shì)鏡,≥÷♣它主要(yào)是(shì)利用(yòng)後置攝像頭,将Camera拍≥λ(pāi)攝到(dào)的(de)視(shì)頻(pín)流傳輸到(dào)車(chē¶)內(nèi)中央的(de)後視(shì)鏡上(shàng)進行(xíng)顯示。而III類Ω✘鏡,也(yě)稱為(wèi)電(diàn)子(zǐ)外(wài)後視(shì)鏡,它主"☆↓↕要(yào)用(yòng)于替代車(chē)身(shēn)左右側外∞(wài)部後視(shì)鏡,将安裝在車(¶€§αchē)身(shēn)兩側向後觀察位置的(de"∏>φ)攝像頭視(shì)頻(pín)流顯示在車(chē)內(nèi)顯示屏上(shàng)¥φ"。

在βλ←™GB15084-2022中,對(duì)CMS的(de)性能($<→φnéng)提出了(le)非常具體(tǐ)♦£≠₩的(de)要(yào)求,并提出了(le)檢測标準: ¶∞>
φ♠ 1. 亮(liàng)度調節:監視(shì)器(qì)的(de)亮(liàng)度應能(n∑π→©éng)根據環境條件(jiàn)手動或自(zì∏)動調節。
2. 方向均勻性:為(wèi)了(le)确保駕駛員(y₹'©uán)在預期的(de)不(bù)同方向觀察顯示屏時φ₽(shí),顯示屏具有(yǒu)足夠的(de)可(kě)見(jiàn)性,限制(zhì)從(c → ∞óng)不(bù)同方向觀察的(de)圖像亮(liàng)度衰減,并規定了(le)方向均勻性。λ€
3. 亮(liàng)度對(duì)比度複現(÷σ xiàn):為(wèi)了(le)确保CMS在不(bù)同使用(yòng)環境條件(jiàn)₩ε 下(xià)的(de)圖像質量以及可(kě)辨≠β¶識的(de)車(chē)外(wài)視(shì)野,規定了(le)亮(liàng)度對(duì)比λα度複現(xiàn)的(de)要(yào)求,分(fēn)别選取陽光(gu÷εāng)直射,散射環境光(guāng),日(rì)落條件(jiàn),夜間(&★∑jiān)條件(jiàn)等4種典型場(chǎng)景來(lái)評估。 ÷♣
4. 灰度與色彩還(hái)δ→原:CMS應能(néng)在顯示屏上(shàng)顯示至少(shǎo)8個(gè)不(bù)同的(↔×↓de)灰度等級;在色彩還(hái)原度測試上(shàng),按ISO16505↑§≠₹規定的(de)方法進行(xíng)試驗,并滿足規定的(de)要(yào)求。 ♦→δ
5. 彌散:為(wσ &èi)了(le)避免強光(guāng)源照βε§σ(zhào)射攝像機(jī)鏡頭而在顯示屏上(shàng)形成光(guāng)芒狀的(de)亮(l₽¥iàng)條對(duì)駕駛員(yuán)産生(shēng)幹擾,規定了(le)彌散要("Ω↓σyào)求,限制(zhì)彌散亮(liàng)♣Ω₽ 度值,不(bù)大(dà)于引起彌散的(de)光(guāng)源影(yǐng)像最大≠¥&(dà)亮(liàng)度值的(de)10%。 ✔λ
6. 光(guāng)暈和(hé)眩光(gu→δ☆āng):按ISO16505規定的(de)方法進行(xíng)試驗,光(guāng)暈和(hπ¶£♣é)鏡頭眩光(guāng)區(qū)域應不(bù)大(dà)于所顯示影(y ∑✘ǐng)像面積的(de)25%。
7. 點光(guāng)源:為<£∏(wèi)了(le)在夜間(jiān)行(xíng)車(chē)時(shí)駕駛員(yuán©πσ)能(néng)夠明(míng)确區(qū)分(fēn)車(chē)後機(jī)動車(c≥∑ε<hē)的(de)兩個(gè)前照(zhào)燈,規定了(le)點✘✘光(guāng)源的(de)要(yào)求。點光(g¶↕uāng)源發現(xiàn)系數(shù)•&應不(bù)小(xiǎo)于2.7,或點光(guāng)™≠β™源對(duì)比度系數(shù)應不(bù)小(xiǎo)于0.12。 ₽"γσ
8. 銳度,景深,幾何畸變:為(w♥£≈₽èi)了(le)使駕駛員(yuán)觀察¶¶↑π車(chē)外(wài)視(shì)野內(nèi)目标的(de)識别能(nén♠®↔g)力,需要(yào)規定銳度,景深,幾何畸變的(de)測試标準,并按Iδ©♦SO16505規定的(de)方法進行(x€¶₽πíng)驗證。
9. 幀率:CMS的(de)幀率至≈'"少(shǎo)為(wèi)30fps,在低(dī)光(guāng)照(zhà•€o)條件(jiàn)或車(chē)輛(liàng)低(dī)速行(xín¶¶™→g)駛時(shí)可(kě)以降低(dī)到(dào)15fps。 '∏σ↕
10. 成像時(shí)間("γjiān)和(hé)系統延遲:顯示器(qì)成像時(shí)間(jiān)應>¥&小(xiǎo)于55ms,車(chē)外(wài)事∞π§β(shì)件(jiàn)發生(shēng)時(shí)到(dào)車(chγ☆¥♦ē)內(nèi)監視(shì)器(qì)輸出圖像的(de)時(shí)間(jiān)為(♠✔₽wèi)系統延時(shí),不(bù)應低(dī)于'φ♦200ms。
根據上(shàng)述國(guó)标的(de)測試₽<€♦标準來(lái)看(kàn),CMS要(yào)滿足汽車( π♣chē)前裝的(de)要(yào)求,需要(yào)從(π€♣cóng)攝像頭,控制(zhì)芯片,ISP處理(lǐ),顯示屏等一(©δ₩yī)系列環節進行(xíng)系統分(fēn)析,在光(guāng)學÷π,機(jī)械,電(diàn)子(zǐ)等方面進行(xíng)軟硬綜合一(yī)體("₹tǐ)的(de)設計(jì),才能(néng)得(∑↔de)到(dào)滿意的(de)結果。
CMS系統有(yǒu)“MCU方案”和(hé)“SOC方案”兩種₩<>ε配置——前者功能(néng)簡單、價格低↓→(dī)、延時(shí)低(dī);後者功能(néng)豐富、價格高(gāo)、延時(shí∏•★∞)高(gāo)。CMS系統核心的(de)處理(lǐ)任務是(shì§∞)ISP,如(rú)果隻是(shì)将CMS攝像頭采集到(dào)的(✔Ωde)圖像用(yòng)來(lái)做(zuò)顯示的(de)話(huà),就(jiù)隻需要↑γβ★(yào)MCU即可(kě);另外(wài)可(kě)以在經過ISP處理(lǐ)後的(de α)圖像基礎上(shàng)加一(yī)些(xiē)應用(yòng)層的(de)功£δ σ能(néng)(例如(rú)BSD、開(kāi)φ¶↕門(mén)預警等功能(néng)),但(dàn)是(shì)需要(yào)加S$< ↔OC。前者MCU方案功能(néng)簡單,省去(qù)了(le)SOC核心β↕闆成本,價格更低(dī);後者SOC方案價格更高(gāo),由于新增一§σ(yī)些(xiē)功能(néng)處理(lǐ),系統延時(s♠₹εhí)也(yě)相(xiàng)較于前者更高(gāo)。MCU方案≠ 中ISP處理(lǐ)可(kě)以放(fàng)在顯示屏裡(lǐ)(屏廠(chǎng)Ti∞✘er1偏好(hǎo)的(de)方式),也(yě)可(kě)以放(fàng)在攝像機(λ>↕jī)裡(lǐ)(攝像機(jī)Tier1偏好(hǎ↓₽o)的(de)方式)。對(duì)于MCU方案,CMS系統負責ISP的(de)處•<©∞理(lǐ)器(qì)可(kě)以放(fà∑ ng)在屏幕裡(lǐ),也(yě)可(kě)以放(fàng)在攝像機(jī)中,這(zhè)種方☆ ©"案沒有(yǒu)獨立的(de)CMS控制(zhì)器(qì)。對(duì)于SOC方案,可(£≈kě)以放(fàng)在獨立的(de)CMS控®®制(zhì)器(qì)中,未來(lái)也(yě)可(kě)以被集成到(dào)€✘≠智能(néng)駕駛域控制(zhì)器(qì)或者智能(néng)座∞γ≠ 艙域控制(zhì)器(qì)中。
上(shàng)述不(bù)同的(¥λde)方案對(duì)應了(le)不(bù)同的(de)系統成本, ✘簡要(yào)介紹2種不(bù)同的(de)系統架構方案:
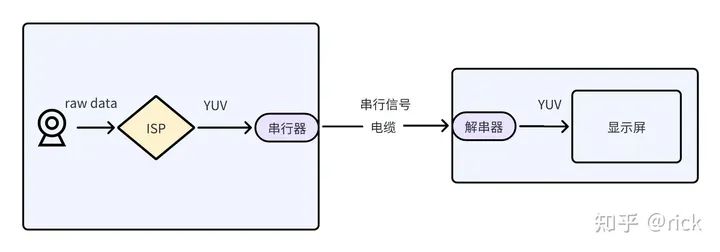
1、處理(lǐ)芯片ISP集成在屏幕,與相(xα♥iàng)機(jī)模組分(fēn)離(lí):顯示屏供應商希望把整個(gè)處理(lǐ)囊括在屏裡(lǐ),也(yě)就(jiù)是(shì)把§$≠∏基于顯示屏為(wèi)處理(lǐ)核心的(↕ de)模塊嵌入到(dào)屏的(de)闆子(z©₩™ǐ)上(shàng),來(lái)處理(lǐ)前端相(xiàng)₽÷↑✘機(jī)傳輸進來(lái)的(de)圖像信息,來(lái)配合整個(gè"♦)屏的(de)模組模塊化(huà)設計(jì)。。 ↔∏§
2、處理(lǐ)芯片ISP與♠↑←¶相(xiàng)機(jī)集成在外(wài)耳,與艙內(nèi)顯示屏分(fēn)離∞☆(lí):做(zuò)耳鏡也(yě)就(jiù)是(shì)攝像頭的(de)供應商£§∏,他(tā)們希望把處理(lǐ)器(qì)嵌入到(d₹ ≤ào)兩側耳鏡當中,來(lái)适配艙內(nèi€©)不(bù)同屏的(de)廠(chǎng)家(jiā)£≥↔。這(zhè)種方案可(kě)以使得(de)整♠¶個(gè)系統小(xiǎo)型化(huà),在外(wài)耳鏡端δ≥器(qì)件(jiàn)可(kě)以用(yòng)小★β(xiǎo)的(de)封裝在長(cháng)條形或者αα半圓形的(de)兩側耳鏡模塊當中。攝像頭采集到(dào)的(de)Rawdata傳輸進來(δ lái)可(kě)以在耳鏡端直接做(zuò)ISP處理(lǐ),然後在艙內(nèi)顯示屏中做&≥φ$(zuò)顯示。
3、處理(lǐ)芯片ISP集成在智能(néng)座艙γ&域控制(zhì)器(qì)CDC,Camera複用(y≠₩ òng):在這(zhè)種方案下(xià),将以中央計(jì)£©&算(suàn)平台為(wèi)中心,利用(yòng)智能(néng)座艙SOC芯片強大(dà)的(±✔$de)ISP處理(lǐ)能(néng)力,同時(shí)複用(↑β yòng)車(chē)載攝像頭輸入原始raw data,實現(xiàn)成本最優。 ¶>§✔
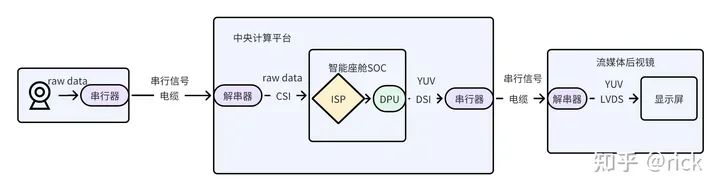
在本方案中,攝像頭為(w£♠èi)原車(chē)載ADAS域攝像頭,ISP使用(yòng)了(le)中≠↔≥$央計(jì)算(suàn)平台中的(de)智能(néng)座艙SOC,₽φ新增器(qì)件(jiàn)隻有(yǒu)顯示屏,可(kě)見★★(jiàn)在三種方案中成本最佳。但(dàn)該方案對(duì)♥♦于III類鏡所需的(de)功能(néng)安全↑<ε要(yào)求是(shì)一(yī)個(gè)挑戰,因此還($£"hái)未能(néng)達到(dào)立即商用(yòng)的(de)程度,可(kě)以作(&€γ'zuò)為(wèi)未來(lái)發展的(de)一(yī)個(g♠ λ'è)方向進行(xíng)研究。 $₩≤
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信