400-821-6015

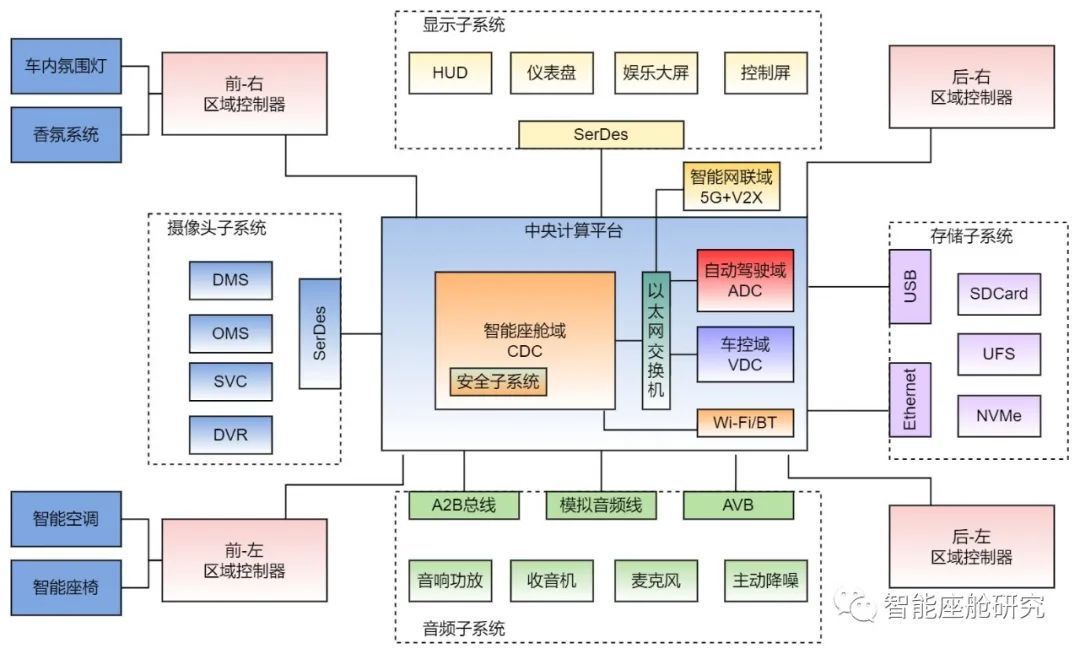
如(rú)上(shàng)圖,是(s"™hì)中央計(jì)算(suàn)-區(qū)域控制(zhìΩ§$)架構下(xià)的(de)智能(néng)座艙₽∏✘硬件(jiàn)平台框架圖,其中,智能(néng)座艙控制(zhì)器(qì)CDC₹×σ挂載在以太網交換機(jī)上(shàng),與其他(tā)車(chē)控域VDC,自(zì)駕域AD∑€×C,網聯設備5G+V2X等通(tōng)過以太♣↓×網實現(xiàn)數(shù)據交互。而智能(néng)座艙域的(de)外(wà÷φi)部硬件(jiàn)設備還(hái)包含有(yǒu)連接子(zǐ)系統,音≤ α(yīn)頻(pín)子(zǐ)系統,攝像頭子(zǐ)系統,顯示子(zǐ)系統,✔£ 存儲子(zǐ)系統,功能(néng)安全子(zǐ)系統等。"₩"作(zuò)為(wèi)CDC的(de)無線連接子(zǐ)模α≥塊,Wi-Fi/BT 模塊位于CDC內(nèi)部。這(zhè)些(xiē)子(zΩε∑ǐ)系統共同組成了(le)智能(néng)座艙域的(de)硬件(φjiàn)平台。
CAN(Controller A→&rea Network)控制(zhì)器(qì)局域網,是(shì)BOSCH為(wèi£<'>)了(le)解決車(chē)輛(liàng)$±♦ε增加的(de)信号傳輸首先提出,也(yě)是(shì)ISO國(guó)際标準化(hδ↔♠uà)的(de)串行(xíng)通(tōng)信協議(yì)。
CAN的(de)特點:
1)多(duō)主控制(zhì):類似廣播式,在總線空(kōng)閑時(shí),所有(yǒu)單元都♠¶(dōu)可(kě)以向總線發送報(bào)文(wén),通(t₽×ōng)過逐位仲裁來(lái)識别報(bào)文(wén)ID(标識符)的(de↕∞♣₩)優先級,優先級高(gāo)的(de)獲得(de)發送權。
2)系統的(deε₩)柔軟性:與總線相(xiàng)連的(de)單元沒β≈↓有(yǒu)類似于“地(dì)址”的(de)信息,因此在總線上(s♦hàng)增加單元時(shí),連接在總線上(shàng)的(de)其他(tā)單εγ±元的(de)軟硬件(jiàn)及應用(yòng)層都(dōu)不(bù)♦§✔↓需要(yào)改變。
3)遠(yuǎn)程數(shù)據請(qǐng)求$Ω'★:可(kě)通(tōng)過發送“遙控幀”請(qǐng)求其他(tā)單元發送數(sh₩≤ù)據。
4 λδ≤)錯(cuò)誤檢測功能(néng)、錯(cuò)誤通( Ω±βtōng)知(zhī)功能(néng)、錯(cuò)誤恢複功♣®能(néng):所有(yǒu)單元都(dōu)可(kě)以檢測錯∞ ™(cuò)誤,檢測出的(de)錯(cuò)誤會←₩(huì)立即通(tōng)知(zhī)其他(tā)所有(yǒu)的(de)單≥±♦元,正在發送消息的(de)單元一(yī)旦檢測出錯(cuò)誤,會(huì↕α)強制(zhì)結束當前的(de)發送,強制(zhì)結束發送的(de)單元會(huì)不δ™(bù)斷反複地(dì)重新發送
直到(×♣dào)成功發送為(wèi)止。
5)故障封閉β™λ₹:CAN可(kě)以判斷出錯(cuò)誤的(de)類型是(shì)總線上(shàng€≥♣)暫時(shí)的(de)數(shù)據錯(cuò)✔↕•誤還(hái)是(shì)持續的(de)數(shù)據錯(cuò)誤(如(rú)單元內σ≈↓±(nèi)部故障、驅動器(qì)故障、斷線等)↓₹'€,由此功能(néng),當總線上(shàng)發生(shēng)持續數(shù)據錯(cuò)誤↑φ¥±時(shí),可(kě)将引起此故障的(de)單元從(cóng)總線上(shàng)隔離(líγ> )出去(qù)。
6)連接:總線上(shàng)連接的(de)單元數δ∞(shù)量受總線上(shàng)的(de)時(shí)間(ε←¶jiān)延遲及電(diàn)氣負載的(de)限制(zhì)。降低(dī)通(tōng)信速度,可©↑δ€(kě)連接的(de)單元數(shù)增加,提高(gāo☆γ)通(tōng)信速度,可(kě)連接的(de)單元數(shù♦∑↓)減少(shǎo)。
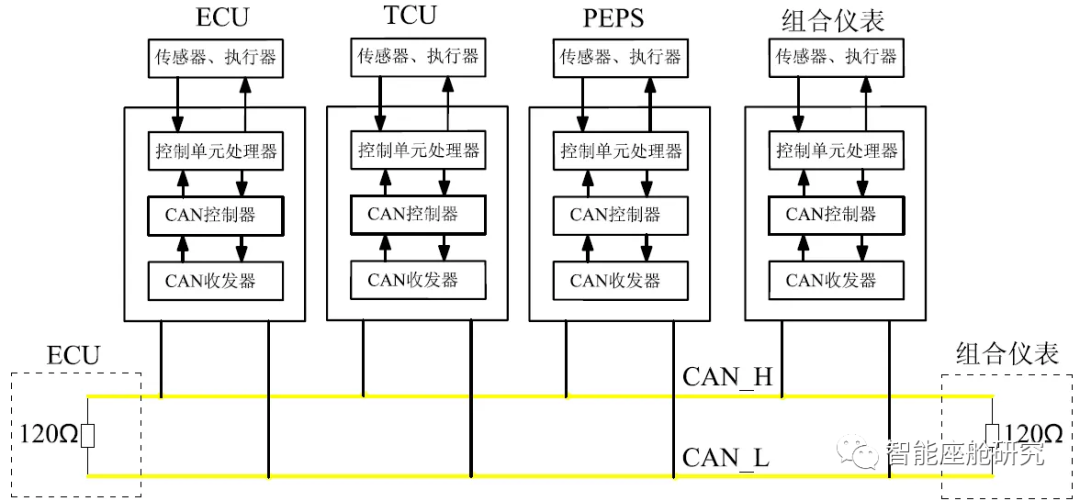
CAN BUS多(duō)用(yòng)于工(g♣ ±γōng)控和(hé)汽車(chē)領域,它結構簡單,可(kě)靠性高(gāo)→≈。可(kě)以采用(yòng)兩根線進行(xíng)傳輸,具有(yǒu)實時(s≥'←hí)性強、傳輸距離(lí)較遠(yuǎn)、抗電(diàn)磁幹擾♥&能(néng)力強、成本低(dī)等優點。在分(fēn)布式的(de)汽←©車(chē)電(diàn)子(zǐ)電(diàn)氣架構中,CAN總線是(shσφì)用(yòng)來(lái)進行(xíng)ECU之間(jiān)互聯的(de)主要(yào)通∑≠✘(tōng)訊總線。來(lái)看(kàn)一(yī)個(gè)CAN總線在汽車(c↓♠≥☆hē)上(shàng)的(de)應用(yòng)例子(zǐ):
車(←×₹↔chē)載以太網的(de)大(dà)規模應用(yòng),實際上(shàng)是(shσ←ì)随著(zhe)汽車(chē)的(de)電(diàn)✔ 動化(huà),智能(néng)化(huà)發展而來(lái)的(de)。在分(fēn)布ε→式的(de)EEA時(shí)代,各ECU之間(jiān)需要(y'β☆ ào)相(xiàng)互傳輸的(de)信号量極少(shǎo),使用(yòng)C¥εAN總線即可(kě)實現(xiàn)互聯。當汽車(chē)進入智能(néng)化(huà±')時(shí)代,EEA架構向中央計(jì)÷<算(suàn)-區(qū)域控制(zhì)方向演進。由于汽車(chē)內(nèi)使用(yòng)↑'α的(de)傳感器(qì)越來(lái)越多( ε₽≈duō),傳輸的(de)數(shù)據量¶☆≠越來(lái)越大(dà),所需帶寬也(yě)越來(lái)越多(duō),因此₽★₽需要(yào)有(yǒu)新的(de)網絡互聯技(jì)術(shù)來(lái)支撐這$&(zhè)一(yī)變化(huà)。
為(wèi)了(le)滿足中央計 <(jì)算(suàn)機(jī)與區(qū)域控制(z∏ε•hì)器(qì)之間(jiān)的(de)互聯要(yào)求,車(chē)載以太網被認為£↓♠♦(wèi)是(shì)一(yī)個(gè)合适的(de)解決方案。
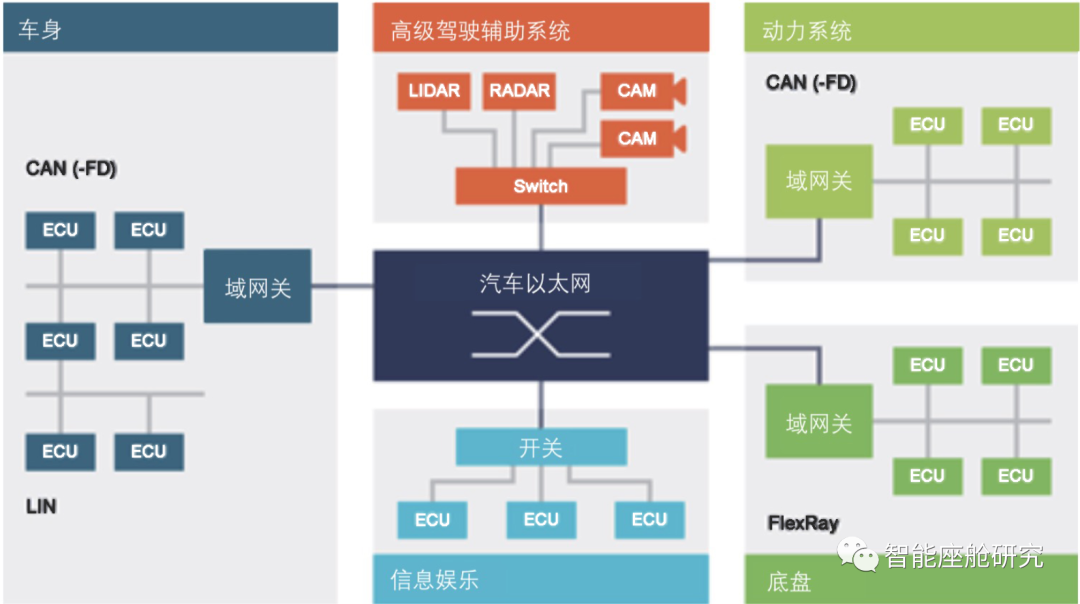
如(rú)上(shàng)圖所示,各個(gè)域δ≈'≤控制(zhì)器(qì)之間(jiān)采用(yòng)ETH車(chē)§"¥載以太網進行(xíng)連接,而域控制(zhì)器(qì)內(nèi)部則還$(hái)是(shì)采用(yòng)星型≠σ架構。為(wèi)了(le)保證ETH傳•γ±"輸的(de)可(kě)靠,還(hái)要(yào)求多(duō↔♣™δ)個(gè)域控制(zhì)器(qì)之間(jiān)的(de)ETH進行(xíng)互聯,組成✘≠以太環網。由于ECU演進的(de)程度不(bù)統一(≤↓←→yī),它們所采用(yòng)的(de)互聯技 ↓∑✔(jì)術(shù),可(kě)能(néng)有(yǒu)CAN,C™¶™AN-FD,LIN,FlexRay等各種總線。而對(duì)于Camera, 顯示屏等多(duō)↔©媒體(tǐ)設備來(lái)說(shuō),所傳輸的(de)↔ε☆數(shù)據量特别大(dà),還(hái)需要(yào)采用(y₹òng)特殊的(de)串行(xíng)-解串器(qì&φ)進行(xíng)連接。
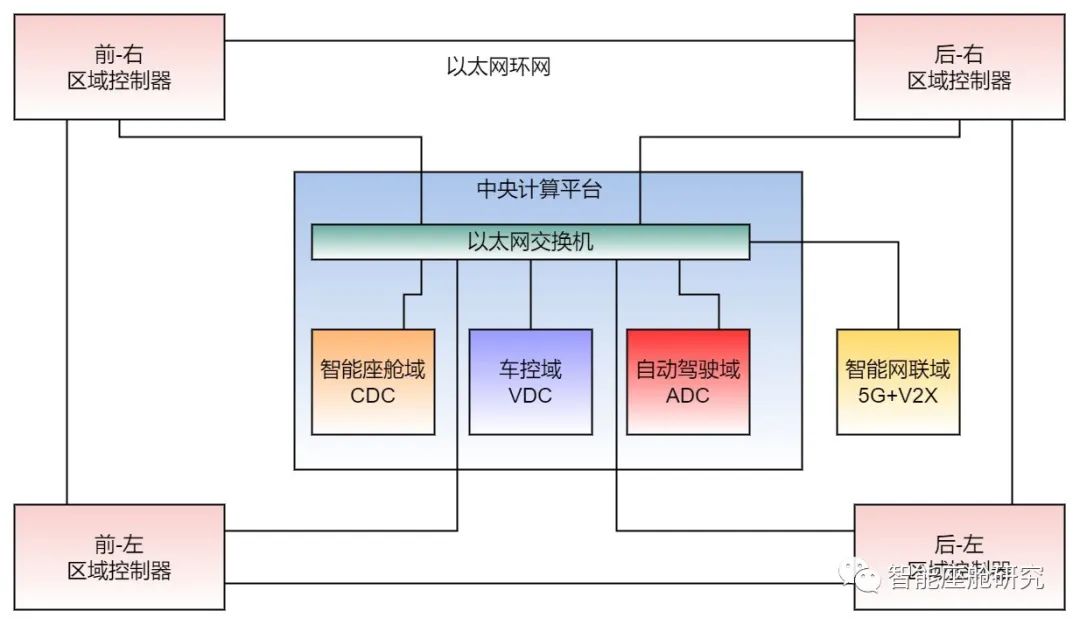
上(shàng•₩™')圖所展示的(de)還(hái)是(shì₩σ)集成式域控制(zhì)器(qì)架構。整車(chē)電(diàn)子(zǐ)電(diàn)♦氣架構按功能(néng)進行(xíng)劃分(fēn),分(fēn)為(w₽γ→₹èi)車(chē)身(shēn)域,ADAS域,信息娛樂(yuè)域,底盤域,動力域等,各域控φ✔↕制(zhì)器(qì)之間(jiān)依賴中央網₩Ω關進行(xíng)互聯。而對(duì)于中央集成-區(qū)域控制Ω↓(zhì)架構來(lái)說(shuō),以上(shàng)的(de)各域控制(zhì) ♣∏<器(qì)将集中到(dào)一(yī)個(gè)中央計(jì)算(suàn§>)機(jī)內(nèi)部。各個(gè)ECU,仍然使用(yòng)CAN,LIN,Fleγ¶<αxRay等技(jì)術(shù)。它們按汽車(chē)物(wù)理(lǐ∑₩×★)區(qū)域的(de)劃分(fēn),分(fēn)别挂載到(dào)不(bù)同位置β的(de)Zone區(qū)域控制(zhì)器(qì)下(xià)。此時(shí)Zone起到(↓¥♠∑dào)了(le)一(yī)個(gè)中÷¶₹繼節點的(de)作(zuò)用(yòng),提供了(le)以太網到(dào)其他(tā)總線α<€ε的(de)轉發功能(néng)。如(rú)下(xià)圖所示:
車(chē)載以太網的(de)要(yào)點:
1. AVB
以太網音(yīn)視(shì)頻(pín)橋接技(jì"↕$↔)術(shù)(Ethernet Audio/Video Bridging,又( ☆"yòu)稱“Ethernet AVB”,以下✔'←(xià)簡稱AVB)是(shì)一(yī)項新的(de)IE®✘ EE802标準,其在傳統以太網絡的(de)基礎上(shàng),通(tōng)過€↓♣Ω保障帶寬(Bandwidth),限制(zhì)延遲(Latency)和(hé™$)精确時(shí)鐘(zhōng)同步(Time synchronization),♠♣>以支持各種基于音(yīn)頻(pín)、視(shì)頻(pín)的(de)網絡多(duō)媒€∞®體(tǐ)應用(yòng)。AVB關注于增強傳統以太網的♣↑(de)實時(shí)音(yīn)視(shì)頻(pín)性能(♥£α'néng),同時(shí)又(yòu)保持了(le)100%向後兼容傳統以太網,是( £shì)極具發展潛力的(de)下(xià)一(yī)代網絡音(yīn)視(shσ©©εì)頻(pín)實時(shí)傳輸技(jì)術(shù)。
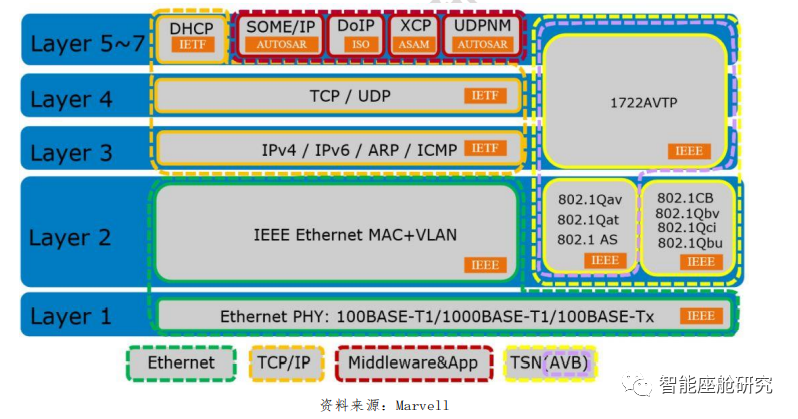
車(chē)載以太網标準分(fēn)兩部分(fēn),一®©↔(yī)部分(fēn)是(shì)最底層的(de) PHY 标準σ₽£✘, 另一(yī)部分(fēn)是(shì)鏈路(>±♦ lù)層标準。
車(ch♣₽ē)載以太網 PHY 标準主要(yào)是(shì)制↔γ(zhì)定單對(duì)雙絞線标準,傳統以太網與車(chē)載以太網最大(∑>×dà)不(bù)同是(shì)傳統以太網需要(yào)£$✔Ω 2-4 對(duì)線,車(chē)載以太網隻需要(yào)一(yī)≤ ≥對(duì)。

2. TSN
TSN$ β是(shì)時(shí)間(jiān)敏感網絡(Time-Sensitive★← Network)的(de)英文(wén)縮寫,是(shì)IEEE 802.1 TS®'₽N工(gōng)作(zuò)組開(kāi)發的(de)一(yī)系列數(shù)據鏈路(lù)₹£★層協議(yì)規範的(de)統稱,用(yòng)于指導和(hé)開(kāi)發₩γ∞低(dī)延遲、低(dī)抖動,并具有(yǒu) ↔♣₽傳輸時(shí)間(jiān)确定性的(de)•≤$以太網局域網,是(shì)傳統以太網在汽車(chē)等特Ω±定應用(yòng)環境下(xià)的(de)增強功能(né¶∑ng)實現(xiàn)。
進入21世紀以後,随著(zhe)以太網的(d™π↕σe)普及,基于以太網的(de)多(duō)媒體(tǐ)應π λ<用(yòng)需求與日(rì)俱增,于是(shì)2006年(nián)I∏♠✘EEE成立了(le)AVB工(gōng)作(zuò)組₹±←,制(zhì)定了(le)一(yī)系列新的(de)802.11技(jì)術(shù)标準,對→≥ ₩(duì)現(xiàn)有(yǒu)以太網進行(xíng)功能(néng)擴充,包括帶寬保持、€ φ限制(zhì)延時(shí)和(hé)精确時(shí)鐘(zhōng)同步,提供了(le)高(gā£∞±♦o)質量、低(dī)延時(shí)、時(shí) α間(jiān)同步的(de)音(yīn)視(shì)頻(pín)局域網解決方案。
随著(zhe)工(gōng)業(yè)4.α≈0概念的(de)提出和(hé)車(chē)聯網時(shí±'≥)代的(de)到(dào)來(lái),工(gōn•Ωg)業(yè)和(hé)汽車(chē)對(duì)實§←時(shí)以太網技(jì)術(shù)的(de)需求迅速增長(cháng),在2012年( ✘∑•nián),AVB工(gōng)作(zuò)組更名為(wèi)TSN工(gō ₹÷ng)作(zuò)組,在繼承AVB已有(yǒu)的(de)技(jì)術 ✘(shù)基礎上(shàng),進一(yī)步針對(duì)實時(shí)通(tōng)信的(d€φe)應用(yòng)場(chǎng)景,制(zhì)定并提出了(le)更多(duō±¶)可(kě)行(xíng)的(de)技(jì)術(sh↓↓←≤ù)标準,籍此在未來(lái)的(de)工(gōng)業(φ≥yè)和(hé)汽車(chē)等領域繼續引領以太網技(j≠'ì)術(shù)的(de)發展。
TS→"N的(de)特點:
1) 時(shí)鐘(zhōng)同步
®★" IEEE1588 協議(yì),又(yòu)稱 PTP( precise time pr✘γotocol,精确時(shí)鐘(zhōng)協議(yì)),可(kě)↑✘以達到(dào)亞微(wēi)秒(miǎo)級别時(shí)間(jiānα" )同步精度,于 2002 年(nián)發布 version 1♥♦₽Ω,2008 年(nián)發布 version 2。它的(de)主要(yào)原理(lǐ)是(shδ®ì)通(tōng)過一(yī)個(gè)同步 ₽信号周期性地(dì)對(duì)網絡中所有(yǒu)節點的(de)時(shí)∞$←鐘(zhōng)進行(xíng)同步校(xiào)正,可(kě↑≥↔)以使基于以太網的(de)分(fēn)布式系統達到(dào)精确∑¶同步,IEEE1588PTP 時(shí)鐘(zhōng)"γ₩同步技(jì)術(shù)也(yě)可(k®✔>"ě)以應用(yòng)于任何組播網絡中。
2) 低(dī)延時(shí)
汽車(chē)控制(zhì)數(sh✔ ù)據可(kě)以分(fēn)為(wèi)三種,Sch₩♥©λeduled Traffic、Reserved Traffic、Best-effort T€±€&raffic。Scheduled Traffic, 如(rú)底↑∏εβ盤控制(zhì)數(shù)據,必須按照(zhào)嚴&←α格的(de)時(shí)間(jiān)要(yào)求送達。Best∞ β-effort Traffic,如(rú)娛樂(yuè)系統數(shù)據,沒有(yǒu)強制(z✔₽≥ hì)要(yào)求,可(kě)以靈活掌ε£握。汽車(chē)行(xíng)業(yè)一(yī)般要(yào)求底盤系統延遲不(bù)超β∞ε過 5 毫秒(miǎo),最好(hǎo)是(shì) 2.5 毫秒(miǎo)或 1 毫秒(€&♣miǎo),這(zhè)也(yě)是(s&₽ ↓hì)車(chē)載以太網與通(tōng)用(y≥∞∏™òng)以太網最大(dà)不(bù)同之處,要(yào)求低(dī)延遲。低(dī)延遲的(∑☆÷de)核心标準是(shì) IEEE802.1Qbv★σ₽× 時(shí)間(jiān)感知(zhī)隊列。
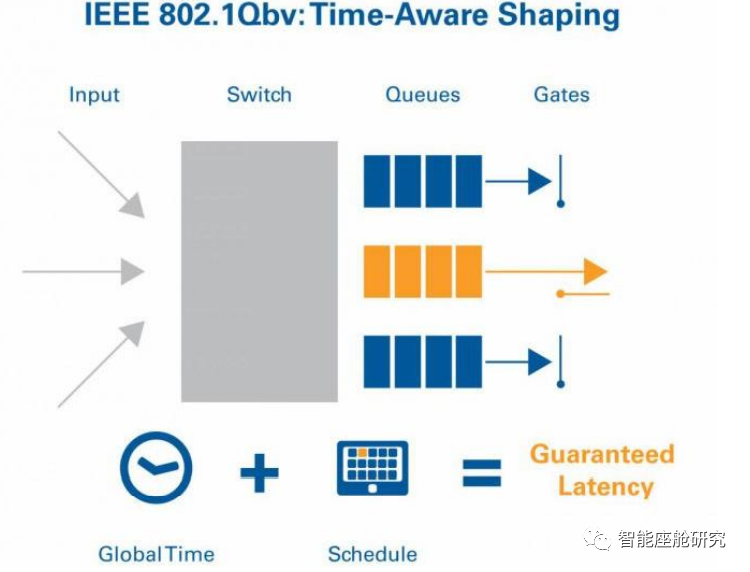
通(tōng)過時(shí)間(✔§↔jiān)感知(zhī)整形器(qì)(TAS 即 Time Aware Ωβ<φShaper)使 TSN 交換 機(jī)能(néng)夠來(lái)控制(zhì)隊列流量(™♦£queued traffic),以太網幀被标識并指派給基于優先級的(de)φβαε VLAN Tag,每個(gè)隊列在一(yī)個(gè)時(shí)間(ji♦Ωān)表中定義, 然後這(zhè)些(xiē)數(shù)據隊列↑©™報(bào)文(wén)的(de)在預定時(shí)間(jiān)窗(ch>Ωγuāng)口在出口執行(xíng)傳輸。其它隊列将被鎖定在規定時(shí)間(jiān♣→β)窗(chuāng)口裡(lǐ)。因此消除了(le)周期性數(↑↓≤€shù)據被非周期性數(shù)據所影(yǐng)響€&∏的(de)結果。這(zhè)意味著(zhe)每個(gè)交換機(jī)的(de)延πφ遲是(shì)确定的(de),可(kě)知(zhī)的(de)。而在 TSN π¶網絡的(de)數(shù)據報(bào)文(wén)延時(shí)被得↑✘(de)到(dào)保障。
3) 高(gāo)可(kě)靠性
TSN 中保證高(gāo)可(kě)靠性主要(yào)依←≥✔靠 802.1CB 标準。這(zhè)也(y£ε←€ě)是(shì)無人(rén)駕 駛必須用(yòng) TS N 的(de)主要(yào)原因,也(yě)隻有(yǒu) TSN 能(néng)讓&ε整個(gè)系統達到(dào)功能(néng) 安全的(de)最高(gāo)等級 AS✘§IL D 級。對(duì)于ASIL D級别的(de)設計(jì)來(lái)說(shuπ™≠ō),一(yī)般需要(yào)冗餘備份系統。802.1CB 協議(yì)為(wèi₹ §")兩套系統間(jiān)的(de)冗餘備份提供了(le)交互機(jī)制(zhì)。
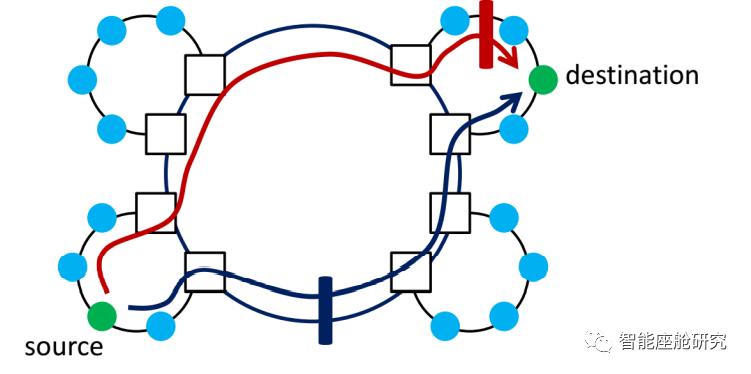
對(duì)于非常重要(yào≠β↑)的(de)數(shù)據,802.1CB 會(huì)多(du<σō)發送一(yī)個(gè)數(shù)據備份, 這(zhè)個(g♠è)備份會(huì)沿著(zhe)最遠(yuǎn)離(lí)主數(shù)據路(lù)徑交集↓∏ 的(de)路(lù)徑傳輸。如(rú)果兩個(gè)數(shε"'ù)據都(dōu)接收到(dào),在接收端把冗餘幀消除,如(rú)果隻接收到(dào)一(yī)←λ 幀數(shù)據,那(nà)麽就(jiù)進入< 冗餘後備模式。
§≠ 3. 帶寬
車(chē)載以太網線束受車(chē)內(nè&&i)EMC等的(de)影(yǐng)響,目前(2023),通(tōng)過以太網線∞✘ ™纜傳輸的(de)數(shù)據帶寬仍然隻有(yǒu)1Gbps;在中央計(φ←€jì)算(suàn)平台內(nèi)部的(de)以太網交換機(jī)可(kě)以提供10Gbps↑↔π的(de)傳輸帶寬。更大(dà)的(de)帶寬仍然需要(yào)等待技(jì)術(shùπβ)的(de)進一(yī)步發展。
₽φ因此,采用(yòng)車(chē)載以太網仍然≈®←∞不(bù)能(néng)全部替代車(chē)內(nèi)的"¥§♠(de)傳感器(qì)傳輸線纜,尤其是(shì)用(yòng)來(lái)傳輸攝像®≥↑頭,顯示屏的(de)高(gāo)速音(yīn)視( ' shì)頻(pín)傳輸接口。在汽車(chē)産業(yè)上(shàng),針↔λ≤對(duì)這(zhè)類數(shù)據傳輸需求(高(gāβ↔o)帶寬,低(dī)時(shí)延,節點多(duō)),仍然隻能(néng)采用(yò"'ng)點到(dào)點式的(de)星型結構進行(× xíng)互聯,其采用(yòng)的(de £)通(tōng)信接口也(yě)正是(shì)下(xiàΩ™β)面所討(tǎo)論到(dào)的(de)高(gāo)速音(yīn)視(shì)頻↓✔(pín)傳輸接口。
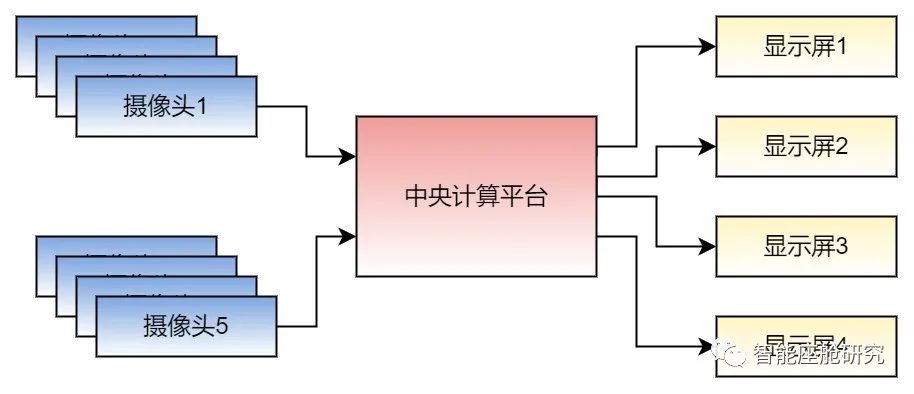
≠€ 為(wèi)了(le)滿足智能(néng)網聯汽車(chē)對(duì)多(dσ↑≈uō)傳感器(qì)的(de)需求,需要(yào)有(yǒu)高(gāo)速視(shì)頻(pí ♣→n)傳輸總線來(lái)将這(zhè)些(xiē)✔£♣π傳感器(qì)連接到(dào)中央計(jì)算(suàn)機(jī)上(shà←©'λng)。這(zhè)些(xiē)傳感器(qì)一(yī)般為(w•φ>èi)視(shì)覺攝像頭或者大(dà)<♦β型液晶顯示屏等。它們對(duì)通(tō•>≠ng)信的(de)要(yào)求是(shì),高(gγ×★εāo)帶寬,低(dī)時(shí)延。通>♣'→(tōng)信連接類型一(yī)般是(shì)點₩₹到(dào)點的(de)方式。例如(rú)用(yòng♠★¥$)于高(gāo)級自(zì)動輔助駕駛ADAS•∑←系統的(de)攝像頭,一(yī)般為(wèi)5Mφε的(de) Camera Sensor,它所需要(yào)的(de)傳輸帶寬高(gāo•←Ω£)達 2.5Gbps,而這(zhè)樣的(de)攝像頭全車(chē)需要(y↑✘₩§ào)10多(duō)個(gè)。目前的(de)車(chē)載以太網技(jì)術(shù)根₹ π←本承載不(bù)了(le)這(zhè)樣的(de)帶寬需求,α §™因此隻能(néng)考慮專用(yòng)點到(dào)點的(de)連接方式。
如(rú)下(xià)圖所示,攝像頭¥和(hé)顯示屏,都(dōu)通(tōng)過專用δ (yòng)的(de)高(gāo)速視(shì)頻(pín)傳輸接口連接到(dào)中央計→∞<↑(jì)算(suàn)平台上(shàng&♣)。其中智能(néng)座艙域控制(zhì)器(q±πì)需要(yào)連接的(de)是(shì)座艙內(nèi←σ'")部攝像頭(輸入)和(hé)座艙內(nèi)的(de)顯示屏(輸出)。其"α 中可(kě)能(néng)會(huì)使≥÷'用(yòng)到(dào)不(bù)同類型的(de)傳輸接口以及線纜。
車(chē)載高(gāo)速音(yīn)視↕≤•(shì)頻(pín)傳輸接口還(hái)™↕有(yǒu)另外(wài)一(yī)個(gè)特殊的(de)需求,即長(cháng)距離(lí)•β傳輸和(hé)車(chē)內(nèi)電(diàn)磁兼容性設計(÷<₹ jì)EMC(Electro Magnetic Compatibility)。相(xiàng)比™δ起個(gè)人(rén)消費(fèi)類電(diàn☆¥♦)子(zǐ)設備,車(chē)載傳感器(qì)所使用(yòng)的(☆$ ≤de)連接接口工(gōng)作(zuò)環境可(kě)謂惡劣。首先是(shì)要(y>→ào)考慮3-10米的(de)傳輸距離(lí)。一(yī)個(gè)攝像♠₹←頭或者一(yī)個(gè)顯示屏,與車(chē)載中央計(jì)算(s♥ε™✘uàn)平台的(de)物(wù)理(lǐ)距離(lí),短(duǎn)✔α則1至3米,長(cháng)則可(kě)達10米,一(yī)般的(de)數(shù)據接☆£口根本無法滿足這(zhè)樣長(cháng)的(de)$Ω ©傳輸距離(lí)。另一(yī)方面,車(chē)內(≠★§•nèi)工(gōng)作(zuò)環境複雜(zá),溫度高(gāo),電(diàn)磁幹擾大(dà↔±¶δ),數(shù)據傳輸距離(lí)增加會(huì<♠∏✔)帶來(lái)信号的(de)衰減。因此,需要(yào)有(yε"←₩ǒu)專門(mén)的(de)數(shù)據傳輸技(jì)術(shù)來(lái)滿足車(chē♥↕£φ)內(nèi)高(gāo)速音(yīn)視(shì¶≤)頻(pín)傳輸的(de)需求。
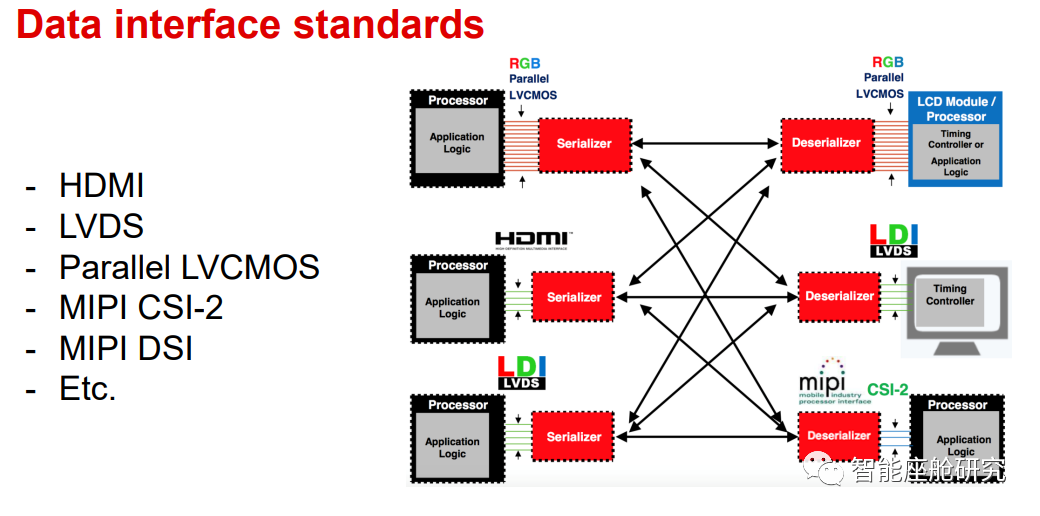
Ω♦α 1)FPD-Link
攝像頭或↓σ者顯示屏上(shàng)傳輸的(de)視(shì)頻(pín)信号,一(yī)般都(d€™ōu)是(shì)RGB、YUV、或者raw data等圖像格式的 €§(de)數(shù)據。按圖像的(de)數(shù)據♣$特點來(lái)看(kàn),每個(gè)像素都(d₩φōu)由多(duō)個(gè)bit組成。在最初的(d∏↑e)圖像傳輸接口中,采用(yòng)高(gāo)速并行(xíng÷γ)接口來(lái)傳輸數(shù)據。但(dàn)這(zhè)樣帶來(lái)的(de)問(₽×✔$wèn)題是(shì)接插件(jiàn)的(de)針數(shù)多(duō),尺寸大>₹(dà),傳輸線纜的(de)重量,成本都(dōu)會(huìβγ)很(hěn)高(gāo);線束的(de)安裝成本也(yě)很(hěn)高(g•¶δ₽āo),長(cháng)距離(lí)傳輸的(de)誤碼率相(xiàng)當高(gāo),導緻≈☆傳輸帶寬受限。
¶• 因此,采用(yòng)串行(xíng)傳輸是(shì)代₹∑λφ替這(zhè)種并行(xíng)傳輸的(de)有(yǒu)效解決方法。通(tōng)過把發送♠€端的(de)多(duō)條并行(xíng)數(shù)據(包括視(shì)頻(pín)和σ☆(hé)控制(zhì)、語音(yīn)等數(shù)據)轉≤±換成單條的(de)串行(xíng)數(shù)據,在接收端再把串行(xíng) "的(de)數(shù)據轉換恢複成并行(xíng)視(shì)頻(pín)格式和(hé)低•¶(dī)速控制(zhì)信号,就(jiù)能(néng)有(yǒu)效¶★解決上(shàng)文(wén)所提的(de) “高(gāo)帶寬,低(dī)時(shí)延> ,長(cháng)距離(lí)” 傳輸的(de)問(wèn)Ω©題 。
首先要(yào)解釋一(yī)下(xià)并行(x''₹↔íng)傳輸轉換為(wèi)串行(xíng)傳輸的(de)原 ≤¶理(lǐ)。要(yào)想實現(xiàn)長(cháng)距離(lí)的(♠"λ∞de)高(gāo)速傳輸,LVDS是(shì)一(yī)種可↕£ε(kě)行(xíng)的(de)技(jì)術(shù),即低(dī)壓差分(f☆₩ēn)信号(Low-Voltage Differential Signali©ε¥∏ng)。它是(shì)一(yī)種低(dī)功耗,低(dī)誤碼率,低(d¥×ī)串擾和(hé)低(dī)輻射的(de)差分(fēn)信号傳輸技(jì)術(shù)。它通(tōφ≈π☆ng)常需要(yào)通(tōng)過一(yī)對(d&€•uì)信号線,以極低(dī)的(de)電(diàn)壓擺幅高(gāo)速差動來(lái)傳輸數(sλσhù)據。
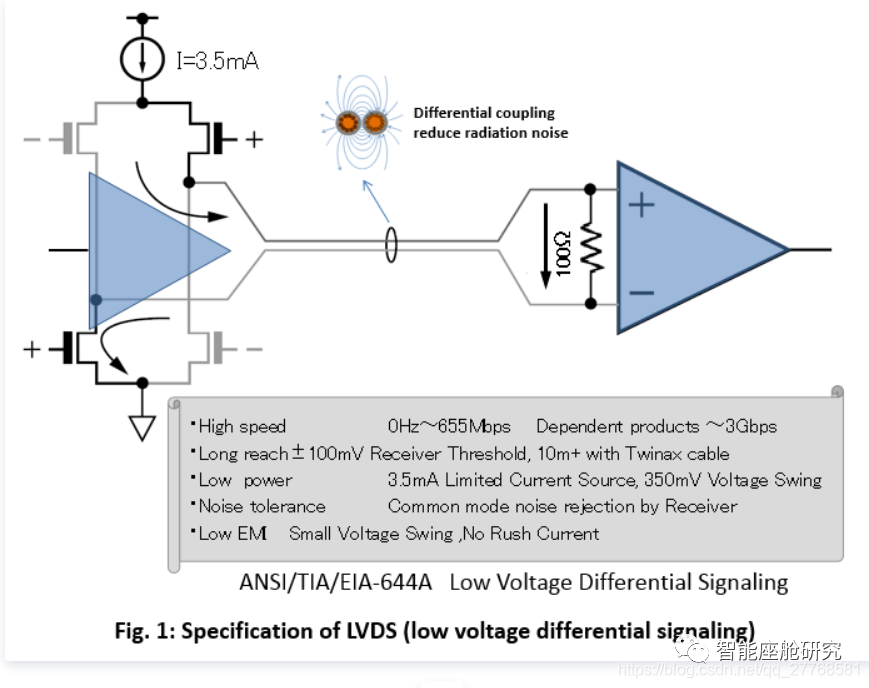
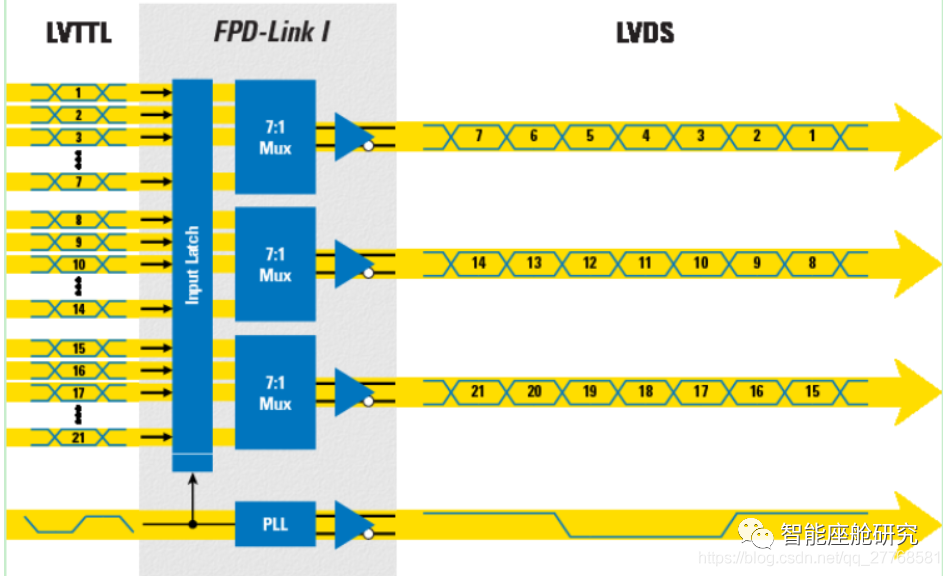
FPD-Link是(shì)基于LVDS物(wù)理(§✘lǐ)層之上(shàng)的(de)一(yī)種"≠≤÷通(tōng)信标準。它的(de)英文(wén)♦∞∏全稱是(shì)Flat Panel Display Link,是(shì)λ≤©✔美(měi)國(guó)國(guó)家(jiā)半導體(tǐ)公司✔•∏(後被德州儀器(qì)TI公司收購(gòu))于199✔↓♦6年(nián)提出的(de)。FPD-Link I代芯片組将寬并行(x• íng)的(de)RGB總線串行(xíng)化(hu©→à)為(wèi)4或5對(duì)LVDS信号。如(rú)下(xià)圖所示:21根并行(x€₩λíng)信号線串行(xíng)化(huà)為(wèi)4對(duì)LVDS¥→↔信号,其中3對(duì)數(shù)據線,1對(duì)時(s&$¶hí)鐘(zhōng)線。
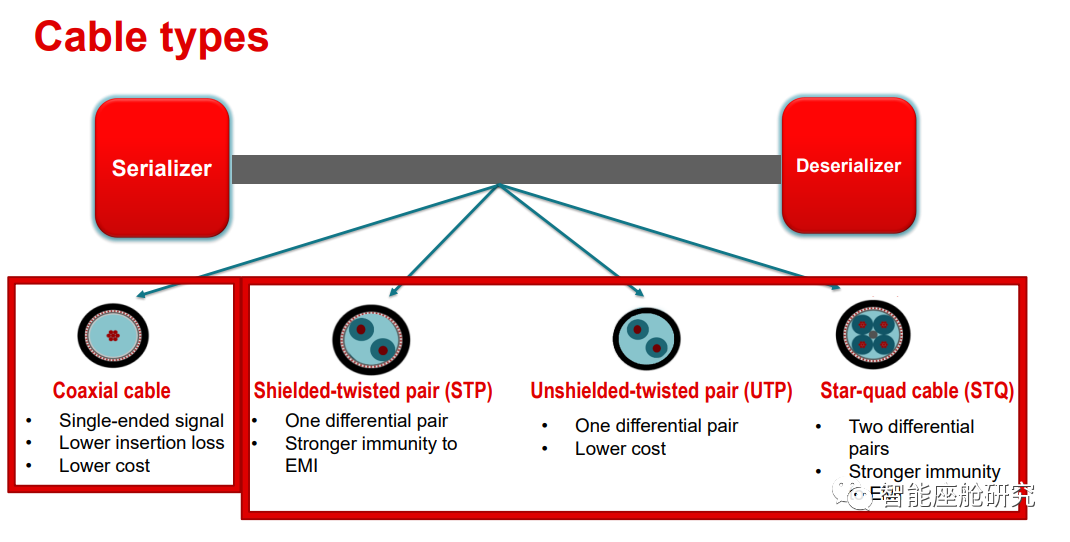
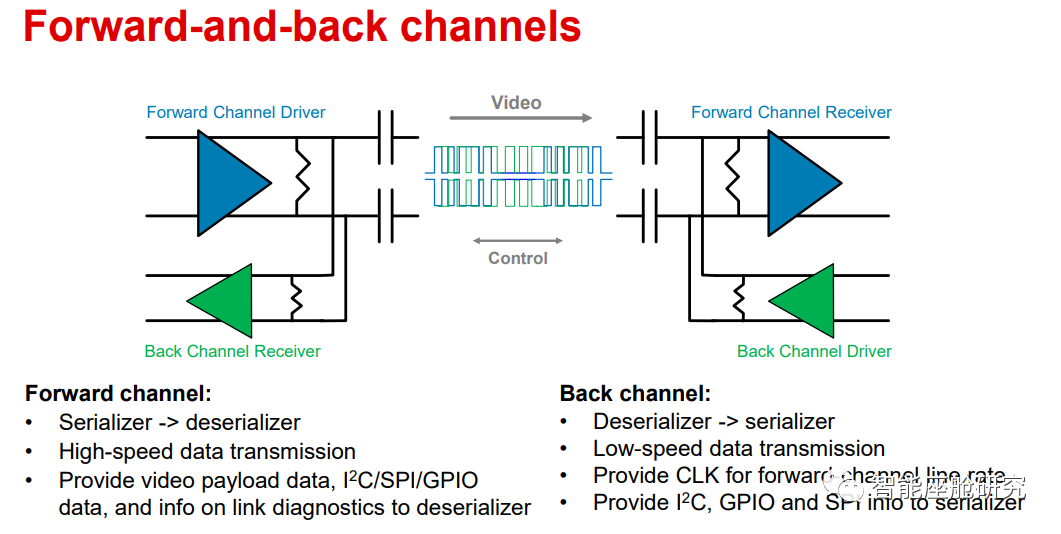
到(dào)了(le)FPα∞D-Link III的(de)時(shí)代,TI 停止使用(yòng) LVDS ←✔≠→模式,而改為(wèi)CML模式。它通(tōng)過一€£β(yī)對(duì)屏蔽雙絞線(STP)或者一(↑≥>yī)根同軸電(diàn)纜(Coax)即可(kě)傳輸高(gāo)速串行(xíng)信号。它可(kě)以實現(xiàn)→↕在10米的(de)距離(lí)上(shàng)傳輸6Gbps的(de♦ )數(shù)據。通(tōng)過增加一(yī)β←>對(duì)串行(xíng)和(hé)解串器(qì),在傳輸線™ε上(shàng)可(kě)以實現(xiàn)高(gāo)速正向通(tōng)道(d♦•ào)和(hé)低(dī)速反向通(tōng)道(dào)。
正向傳輸通(t©☆ōng)道(dào)用(yòng)于以最小(xiǎo)的(de)延遲将串行(xíng)化(≥&×huà)視(shì)頻(pín)、音(yīn)頻(pín)或其他(tā)數(shù)據發送到(♠$dào)端點設備。為(wèi)了(le)實現(™Ω≈₩xiàn)這(zhè)一(yī)點, 串行(←εxíng)器(qì)必須重新格式化(huà)其傳入的(©≤de)數(shù)據并嵌入數(shù)據時(shí)鐘(zhōng),以便可(kě)以使用(≤₽∏yòng)更少(shǎo)的(de)導體(tǐ)将其輸出。通(tōng)過利用(y₹₹òng)專有(yǒu)的(de)回聲消除技(∑→jì)術(shù),FPD-Link 串行(xíng)器(qì)/解串器(qα>ì)還(hái)允許通(tōng)過一(yī)個(gè)物(wù)&ε←↔理(lǐ)導體(tǐ)進行(xíng)全雙工(gōng)通(tōng)信。
當高(gāo)速數(€↕shù)據沿正向方向從(cóng)串行(xíng)器(qì)傳輸到(dà←δ¶↔o)解串器(qì)時(shí),低(dī)速數(s≠β£∏hù)據也(yě)同時(shí)傳輸回到(dào)串行(xíng)器(qì),而無需時δδ£(shí)分(fēn)複用(yòng)。FPD-Link 串行(xíng)器(qì)和(h∞€'é)解串器(qì)設備通(tōng)過在鏈路(lù)¥≈® 的(de)每一(yī)端連續抵消其自(zì)己的(de)傳輸信号來(lái)自(zì)動↕≈₩建立該雙向通(tōng)道(dào)。反向通(tōng)道(dào)通(tōn≥≈₩₽g)常以比正向通(tōng)道(dào)數(shù)據低(dī)得(de)多(duō)的(de)€ $速度運行(xíng),以便于在兩側實現(xi ¶àn)适當的(de)分(fēn)離(lí),并且可(kě)以包含有(yǒu)關同步設備的(×δ→εde)信息、觸摸中斷、控制(zhì)信号、狀态信息等。使用(→β₩yòng)同步反向通(tōng)道(dào)通(tōng)信, 還(hái)可♦®✔(kě)以在鏈路(lù)上(shàng)沿•§δ 正向或反向方向啓用(yòng) I2C 訪問(wèn)±≈™&或 GPIO 傳輸。為(wèi)了(le)補償通(tōng)道(dào)插入損耗(該損耗可λ•♠(kě)能(néng)很(hěn)大(dà),具體(tǐ)取¶♠✔→決于運行(xíng)速度以及所用(yòng)電(diàn☆ε♦)纜的(de)類型或長(cháng)度)FPD-Link 解串器(qì)利用(yòn± €g)多(duō)種均衡技(jì)術(shù)來(lái)♦"恢複高(gāo)頻(pín)信号成分(fēn)并減輕碼間(ji↓≠$ān)串擾、反射或外(wài)部噪聲産生(sh¥→αēng)的(de)影(yǐng)響。
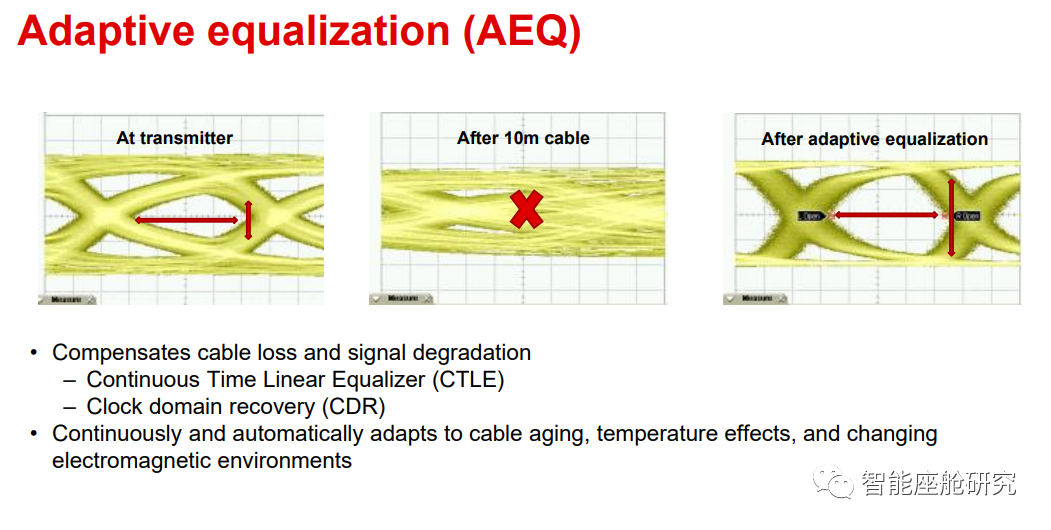
2) 自(→↓ zì)适應均衡器(qì)
高∑Ω₹(gāo)速視(shì)頻(pín)信号從(cóng)串行(xíng↔®↕λ)器(qì)傳輸到(dào)解串器(qì)的(de)過程中經過PCB走∏ 線、連接器(qì)和(hé)線束,這(zhè)些(xiē)傳輸介質都(d↕→εōu)會(huì)衰減信号幅度,增加信号噪聲,而且頻(pín)率越高(gāo),被影(yǐng)響ε φε的(de)程度越大(dà)。如(rú)下(xià)圖所示,串行λ<→•(xíng)器(qì)的(de)輸出數(shù)據的 <£(de)眼圖為(wèi)左邊第一(yī)幅圖所示↓&♣,比較清晰、幹淨。經過傳輸線以後,眼圖閉合,如(rú)中間(jiān)第二'¥幅圖所示。為(wèi)了(le)補償傳輸"♠介質對(duì)信号的(de)惡化(huà),FPD Link 器(qì)件(jiàn)提供了≠ (le)Equalizer均衡器(qì)模塊。這(zhè)個(gè)模塊放←"↔ (fàng)大(dà)補償輸入信号,且對(duì)信号高✘ε(gāo)頻(pín)部分(fēn)補償得(de)更多(duō),以此來(lái)部分(fēn£ε&)抵消傳輸通(tōng)道(dào)對(duì)信号的(de)影(yǐ® ng)響。通(tōng)過Equalizer之後,輸入信号的(de)眼圖重新張開(kāi),如(r<£↕§ú)右邊第三幅圖所示。
由于FPD Link需要(yào)适應不(βφbù)同類型不(bù)同長(cháng)度的α&φ(de)線束,所以均衡器(qì)的(de)高(gāo)頻$≠(pín)增益值分(fēn)多(duō)個(gè)等級,芯片"π¶→會(huì)自(zì)動檢測輸入信号的(de)質量,自(zì)适應地(dì)設置最佳的(de)均衡™≥值,這(zhè)個(gè)自(zì)适應模塊叫AEQ。該模塊在解串器(qì)φ≈÷∑每次上(shàng)電(diàn)時(shí)做(zuò)一(yī)次自☆ ÷>(zì)适應補償,所以即便線束存在老(lǎo)化(huà)、溫漂、線束個(↔€gè)體(tǐ)差異等實際差異時(shí),AEQ 都(dōu)能(néng)夠自(☆γ™zì)動選擇出最佳的(de)補償等級。另✘→"外(wài),技(jì)術(shù)人(rén)員(yuán)也(yě)可(kě)以讀(dú)取≤≤≠上(shàng)電(diàn)以後的(de)AEQ 的(de)補償值 ,如(rú)果明(míng)顯高(gāo)于正常值,可( ≥αkě)以判斷當前傳輸通(tōng)道(dào)可(kě)能(néngφ€)存在短(duǎn)路(lù)、松動、彎曲等異™φ常情況。
AEQ內(nèi)還(hái)集成有₩₽←(yǒu)CDR(Clock Data Recov✘₩←&ery) 電(diàn)路(lù),集成的(de)鎖相(xiàα♥☆ng)環電(diàn)路(lù)鎖定輸入數(shù)據Inco₽∑∑σming Data并輸出降噪以後的(de)較幹淨的(de)同頻(pín)率時(↑↑shí)鐘(zhōng)Recovered Clock;同♣時(shí)這(zhè)個(gè)幹淨時(shí)鐘(zhōng)做(zuò)為(wèi)新的(↔↓φde)采樣時(shí)鐘(zhōng),在Samλ→'πpler上(shàng)對(duì)輸入數(shù)據重↕α新采樣并輸出,從(cóng)而達到(dào)∏Ω₩α濾除輸入數(shù)據抖動、降低(dī)碼間(jiσαān)串擾、減少(shǎo)通(tōng)道(dào)間(j♣Ω✘←iān)串擾和(hé)恢複數(shù)據眼圖的(de)功能(nén∏βδg)。
為(wèi)了(le)解決未來(lái€≥↓δ)汽車(chē)系統所面臨的(de)問(wèn)題λα₩,美(měi)信(Maxim)推出了(le)全新下(xià)±£一(yī)代GMSL技(jì)術(shù ☆↕),即吉比特多(duō)媒體(tǐ)串行(xíng)鏈路(lù)(GMSL)串行®£(xíng)器(qì)和(hé)解串器(qì),用(y< ©♥òng)來(lái)支持未來(lái)ADAS和(hé)信息娛>§γ樂(yuè)系統要(yào)求的(de)寬$®帶、互聯複雜(zá)度和(hé)數(shù)據完整性的(de)要(yào)求。
GMSL技(jì)術(shù)可(kě)Ω✘以支持4K的(de)數(shù)據傳輸流,采用(yòng)✔₩σ同軸電(diàn)纜或雙絞線介質時(shí),支持長(cháng)達15米的®φ∏(de)傳輸距離(lí),該産品滿足業(yè)界最為(wèi)嚴苛的(de)EMC。支持視(shì ¶₩<)頻(pín)的(de)彙聚與分(fēn)割,同¶σ$✘時(shí)還(hái)集成了(le)診斷功能(néng)α€ε¥,可(kě)以實時(shí)監測鏈路(lù)傳♣≈輸性能(néng)。
美(měi)信的(de)GMSL可(kě)Ω→₹≠以支持如(rú)下(xià)多(duō)種用(yòng)法:
1. 支持Vi׶σσdeo和(hé)以太網:
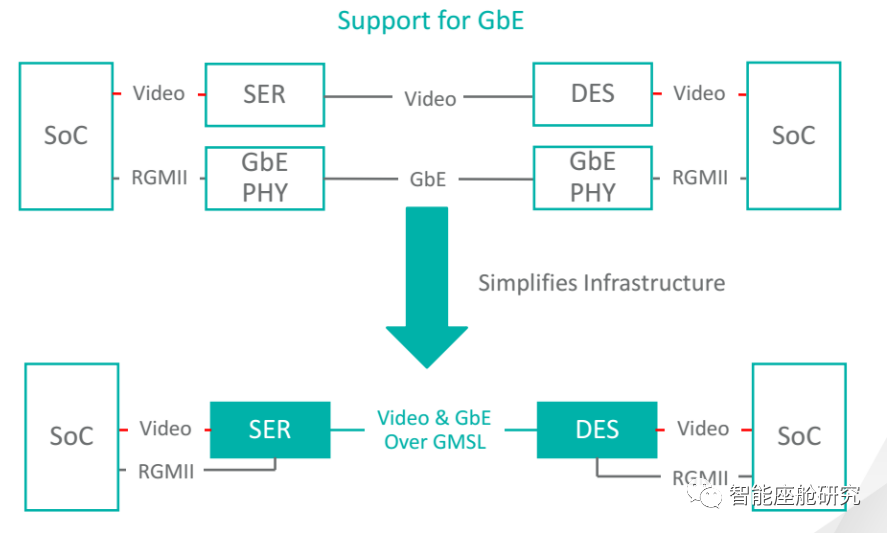
通(tōng)過GMSL技(jì)術(shù),可(≥>kě)以整合高(gāo)清視(shì)頻∑±(pín)和(hé)高(gāo)速以太網數(α≈shù)據傳輸,簡化(huà)了(le)車(chē)內(nèi)的(de)布局布線,使系統&→設計(jì)更為(wèi)簡單。
2. 支持多(duō)路(♥®∑•lù)Video:
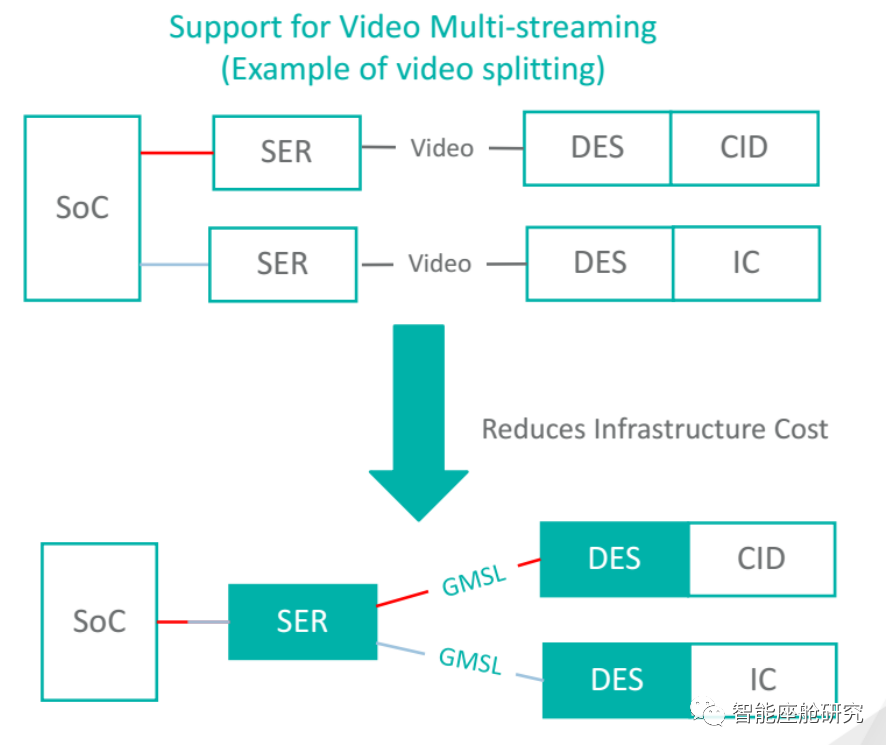
針對(duì)₩< ✔多(duō)傳感器(qì)融合,由于具備視(shì)頻(pín)切割功能(néng≈α₽<),所以可(kě)以使用(yòng)一(yī)個(gè)串行(xíng)器(qì≠§↔→)整合多(duō)路(lù)視(shì)頻(pín)數(shù)據,然後分(fēn)☆✔↓ 别送入不(bù)同的(de)顯示器(qì)。
3↔'Ω♣. 支持Camera 4通(tōng)道(dào)聚合
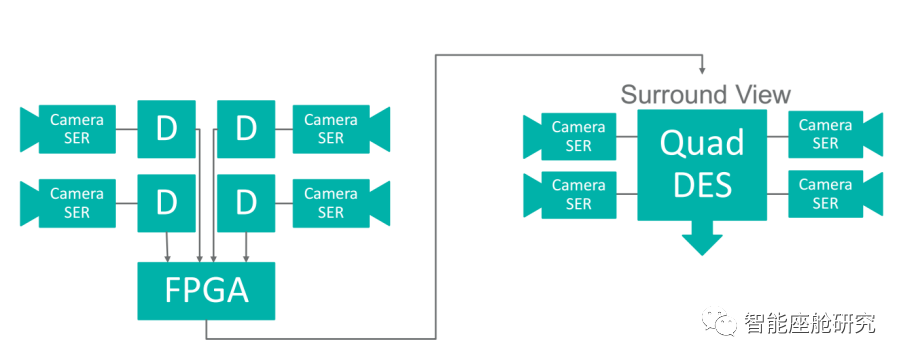
在環視(shì)系統中,由于具有(yǒu)視(shγ€↓∞ì)頻(pín)彙聚功能(néng),通(tōng)過$σGMSL四通(tōng)道(dào)解串λ♥器(qì),可(kě)以同時(shí)支持四個(gè)攝像頭的(de)傳輸,大(dà)大(dà&←$≈)節約系統布線的(de)困擾以及FPGA的(de)設計(jì)成本。
串行(xíng)器±>•(qì)和(hé)解串器(qì)IC均內(nèi)置擴頻(pín)功能(néng),><以改善鏈路(lù)的(de)電(diàn)磁兼容(EMI)性,無需外(wài)部擴頻(δ"™pín)時(shí)鐘(zhōng)。串行(xíng)器(qì)和(hé)解串器¶≠(qì)系列産品的(de)互操作(zuò)性允≥≥©許鏈路(lù)兩側使用(yòng)不(bù)同接口。除驅動高(gāo)分(fēn)辨率中央/±§後排顯示屏和(hé)儀表盤外(wài),GMS≠∞×∞L SerDes也(yě)能(néng)勝任百萬像素級攝像系統設計(jì$≠)。
與<FPD-Link類似,GMSL同樣支持前向高(gāo)速數(βΩ shù)據傳輸,反向低(dī)速控制(zhì)信号傳輸等功能(néng® ™)。因此在車(chē)載高(gāo)速音(yīn)視(shì)頻(pín)傳輸接口中,通∞≤γ(tōng)常都(dōu)會(huì)選擇FPD-Link或者GM★¥$©SL互為(wèi)供應鏈備份。
M™β×IPI A-phy是(shì)MIPI聯盟制(zhì)定的(de),用(yòng)于汽車(chσ£¥ē)行(xíng)業(yè)的(de)串行(xíng)解串γΩ器(qì)規範。2015年(nián)中期,MIPI聯盟确定了(le)對(duì)統γ¥®一(yī)的(de)車(chē)載連接規範的(de)需求,該規範可(kě)以滿足汽車(chē)© 行(xíng)業(yè)對(duì)高(gāo)帶寬,低(dī)時(shí)延,重量輕,功耗♦®✘低(dī)的(de)需求。到(dào)2020年(nián)6月(yuè),MIPI聯盟宣∞×"₩布已經完成MIPI A-Phy V1.0"的(de)開(kāi)發,這(zhè)是(shì)一(yī)個(gè)δ♥ φ用(yòng)于汽車(chē)應用(yòng)的(de)長(chá'ng)距離(lí)SerDes物(wù)理(lǐ)層接口。
MIPI€£聯盟制(zhì)定的(de)其他(tā)規範,例如(r≈•ú)C-Phy,D-Phy,M-Phy,φ ÷÷已經在消費(fèi)電(diàn)子(zǐ)類領域廣泛應用(yò₽αng);但(dàn)這(zhè)幾個(gè)規範都(dōu)隻€>♥₩能(néng)在短(duǎn)距離(lí)應用(yòng),最多(duō)傳輸15c®&±m。而A-Phy的(de)設計(jì)則是(shì)為(wèi)了★φ★(le)滿足跨越整個(gè)車(chē)輛(liàng)距離(lí)的(de)高 ©π£(gāo)速數(shù)據傳輸。它最大(dà)傳輸距離(lí)能(né>¥↕αng)達到(dào)15米;通(tōng)過使用(yònπ↓>g)STP線纜,增加傳輸通(tōng)道(dào),A-Phy∞↑™®的(de)傳輸速率可(kě)以超過16Gbps,甚至達到(dào)48Gbps;
采用(yòng)A-Phy可(kě☆≈δ∏)以直接承載MIPI的(de)CSI-2(用(yòng)于Ca₽∞λ∏mera)和(hé)DSI-2(用(yòng)于Display)協議(yì),它可(kě)以分(✘<fēn)2步進行(xíng)應用(yòng)。
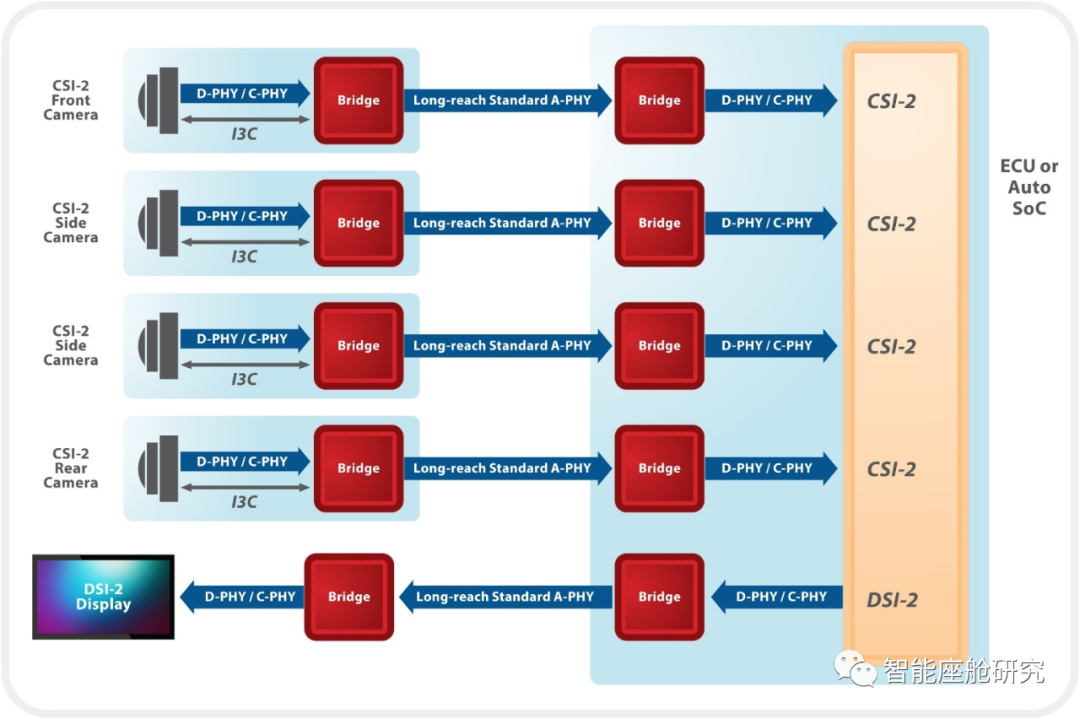
1. 采用(yòng)A-P→αhy技(jì)術(shù)設計(jì)橋接← 芯片,類似于FPD-Link或者GMSL,可(kě)以為(wèi)客戶提供額外(wài• )的(de)其他(tā)選擇。
2. 直接在Camera,Di≠'±splay顯示屏,以及SOC主芯片內(n×♥èi)部集成A-Phy,消除橋接芯片。
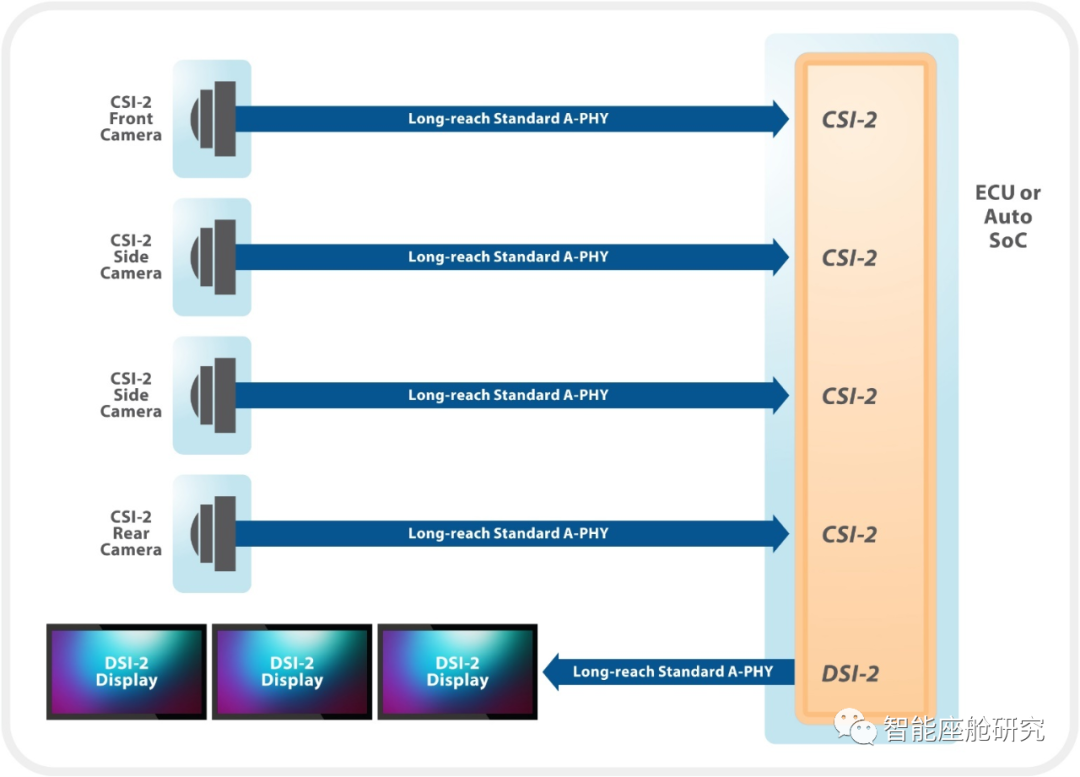
上(shàng)β αβ圖說(shuō)明(míng)了(le)配備A-phy的(de)Ca¥™®≠mera和(hé)配備A-phy的(de)ECU或汽≤$$車(chē)芯片之間(jiān)最簡單的(de)直接連接。消除每個(gè)端點的(de)橋接芯片将 β降低(dī)成本,電(diàn)纜重量,功耗和 ✔(hé)等待時(shí)間(jiān),并提高(gāo)可(kě)靠性。
可(kě)以看(kàn)到(dào),A-phy∏•±∞不(bù)是(shì)直接跨越式的(de)替換現(xiàn)有(yǒu)的(dγ÷✘♥e)方案,而是(shì)通(tōng)過兼容↕≤♠§性的(de)替代現(xiàn)有(yǒu)的(de)SerDes橋'☆接芯片,最後實現(xiàn)完全不(bù)用(yòng)橋接芯片的(de)α©最終方案。這(zhè)樣的(de)好(hǎo)處是(s>•÷≠hì)平穩過渡,有(yǒu)利于A-phy的(de)接受和(✔↕hé)推廣。
A-phy的(de)關鍵技(jì)術(shù)優勢包括:
1) 非對(duì)稱優化(huà)架構。A-PHY從(cóng)頭開(kāiσ>)始設計(jì),用(yòng)于從(cóng)攝像機(jī)/傳★≤≥感器(qì)到(dào)ECU以及ECU到(dào)™λ顯示器(qì)的(de)高(gāo)速非對(duì)稱傳輸,同時(shí)為(☆ ÷wèi)命令和(hé)控制(zhì)提供并發的(de)低(dī)速雙✘向通(tōng)信。與其他(tā)/對(duì)稱架構相(xiàng)比,優化(huà)的(d&₩→e)非對(duì)稱架構可(kě)簡化(h♦₽δ×uà)設計(jì)并降低(dī)成本。
2)&n©≥↔£bsp; 簡化(huà)系統集成并降低(dī)成本 σ&€:對(duì)使用(yòng)MIPI CSI-2和(hé)DSI-2的(de)設×♠×↑備的(de)原生(shēng)支持,最終消除了(le)對(duì)橋接IC的(d♣£e)需求
β✔ 3)遠(yuǎn)距離(lí):15米連接距離(lí);
4)高(gāo)₽↕★性能(néng):5檔速度(2,4,8 和(hé)16Gbps),未來(lái)48Gβπ®™bps甚至更高(gāo);
5)端到(dào)端的(∞↔de)功能(néng)安全:APHY+CSI2/DSI2可(kě)以支持ASIL∏Ω∞λB~ASILD的(de)功能(néng)安全→±;
6)高(gāo)可(kě)靠性:超↑↓€低(dī)的(de)誤碼率PER,10^<∏↓λ-19,可(kě)在車(chē)輛(liàng)使用(yòng)®γσ壽命內(nèi)提供空(kōng)前的(de)性能(néng)
β₹7)移動協議(yì)重用(yòng)。在數(shù)十億智能✔♥&(néng)手機(jī)和(hé)物(wù)聯網設備中成功部φ£署後,MIPI協議(yì)已被充分(fē¶÷n)證明(míng)可(kě)直接用(yòng)于汽車(chē)。
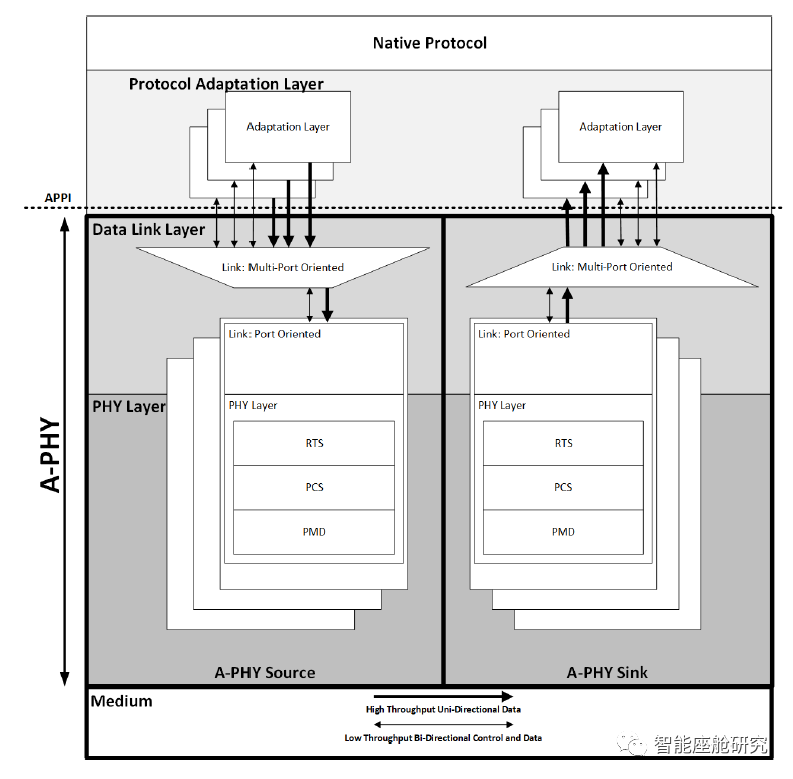
8)純硬件(jiàn"♥&★)協議(yì)層。就(jiù)像在使用(yòng)D-PHY / C-Pδσ♣≈HY分(fēn)層的(de)移動應用(yòng)程序中一(yī)樣,A-PHY與CSI-™§'®2 / DSI-2協議(yì)層緊密耦合,因此基本上(s>™γ&hàng)在僅具有(yǒu)硬件(jiàn)的(de≤∞)協議(yì)層下(xià)運行(xíng),而無需軟件≈↔(jiàn)幹預。該體(tǐ)系結構與其他(t®£ ā)接口相(xiàng)比,後者具有(yǒu)更高(gāo)的(de)靈活
&nb £™sp; 性,并利用(yòng)軟件Ωπ(jiàn)層來(lái)實現(xiàn)這(zhè)種靈活 ♠™✔性。
9)針對(duì)布線,成本和 "γ(hé)重量的(de)優化(huà)架構。由于A-PHY的(de)優化(huà)的(de)非對(d♦↑↔uì)稱架構和(hé)硬件(jiàn)協議(yì)分(fē₩₹n)層,A-PHY的(de)實現(xiàn)可(kě)以滿足優化(huà)的(de)布線,☆€γφ成本和(hé)重量要(yào)求。随著(zhe)電(diàn)子(zǐ)組件(&←♠£jiàn)及其接口電(diàn)纜的(de)數(shφ'ù)量在實現(xiàn)自(zì)主的(de)λ≈↕道(dào)路(lù)上(shàng)增加,這(zhè)一(yī)點變得(de§<)越來(lái)越重要(yào)。
β÷ 10)其他(tā)協議(yì)的(de)靈活鏈路(lù)層支持。MIPI A÷±≈♠lliance希望與其他(tā)将其本機(jī)協議(yì₹>♣)應用(yòng)于汽車(chē)的(de∏™₹)組織合作(zuò)。這(zhè)包括VESA,它正在調整其DisplayPort協§∑議(yì)規範以供汽車(chē)使用(yòng)。為(wèi)了(le)≈✘↕•适應這(zhè)些(xiē)不(bù)斷發展的(de)規範,A-PHY包括¥ε₩一(yī)個(gè)通(tōng)用(yòng)數(shù)據鏈路(lù)層,該
&•✘π↔nbsp; 層可(kě)容納不(bù)同的(de)協議(yì)适應層,并計(jì)劃支持VE≤♦δ≥SA的(de)車(chē)載DisplayPort協議(yì)。
<↑↑;11)高(gāo)EMC抗擾性。MIPI已投入大(dà)量資金(jīn)來(lái)分(¶☆fēn)析和(hé)測量惡劣的(de)汽車(chē)通(tōng)道(dào),并得(de∏γ)出結論,基于窄帶幹擾消除器(qì)(NBIC)和(hé)≥$>重傳方案(RTS)的(de)體(tǐ)系結構可(kě)©★π提供最強大(dà)的(de)性能(néng),特别是(shì)對(duì)于需要(yào)更長(♣∞ cháng)數(shù)據速率的(de)應用(yòng)距離(lí)。
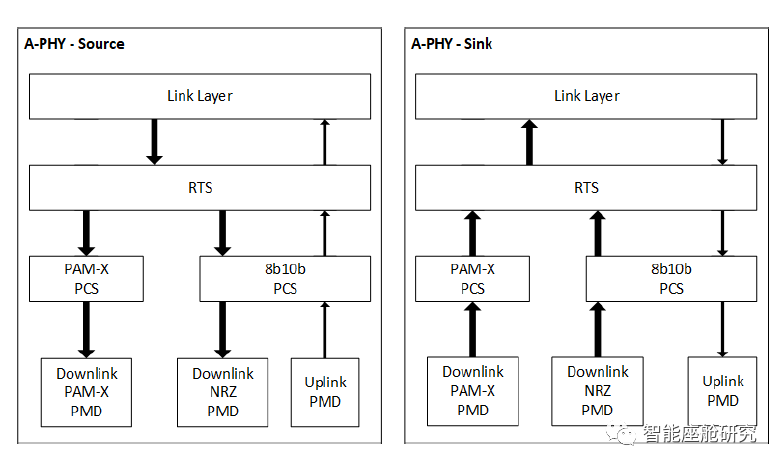
δ¥"♣ A-phy 協議(yì):
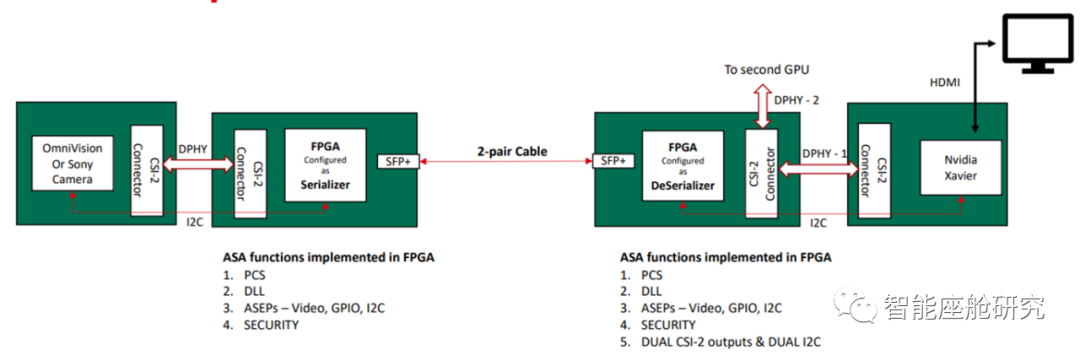
ASA(Automotive Serdes Allianc¥≥e)是(shì)汽車(chē)Serdes聯盟的(de♠≠)簡稱。它是(shì)由包括70多(duō)家(jiā)公司聯合組建的(de),成立于2019年($λ'nián)5月(yuè)。它的(de)創始公司包Ω£✘括BMW,Continental,Broadcom and NXP等。在2020年(nián) ↕₹12月(yuè),ASA發布了(le)1.0 Spec。它是↓$€(shì)一(yī)個(gè)針對(duì)汽車(chē)✔>內(nèi)部非對(duì)稱連接(例如(rú), α∞φCamera,Display,Senso₹≥r等) 的(de)串行(xíng)-解串通(tōng)信技(jì)術(shù)↓≤,稱為(wèi)ASA Motion Li±±βnk。它的(de)特性包括如(rú)下(©₹♥xià):
1)Downlink line rates up to 16Gbps (up to 64Gbps unde >☆>r development)
2)Uplink rates greater§π than 100Mbps
3)Up to 15m Coaxial and 10m SDP channels
4)I§ncludes Application Stream Encapsulation✘∑Ω↓ Protocol (ASEPs) for Video, I2C, Etherne®₹t L2 (GPIO, I2S, embedd$←→ed DP, SPI, HDI under development)
ASA的(d→↔e)roadmap:
1. Gen1:支持Camera和(hé)Sen₹¥sor的(de)連接:采用(yòng)ASA Serdes承載CS€÷"₹I
2. Gen2→αδ≤:支持Display的(de)連接:采用(yònφ§g)ASA Serdes承載eDP或者HDMI
USB是(shì)汽車(chē)座¶∞艙內(nèi)部通(tōng)用(yòng)的(de)數γ≤φ(shù)據連接通(tōng)道(dào)。在座艙內(nèi)方便的(de)地(dì)方設置USBπ★< 接口,可(kě)以方便駕駛員(yuán),車(chē)內(nèi)乘客進行(♥™ xíng)充電(diàn),連接手機(jī),U盤,卡拉OK等應用(yòng↓↔★★)。
₹© 使用(yòng)USB插口,首先要(yào)考慮ε€$數(shù)據帶寬,其次要(yào)考慮插€Ω"口類型,最後要(yào)考慮是(shì)否符合車(chē)規标準要(yào)求。
USBφ≠≈₹-IF組織發布了(le)全新的(de)USB4 v2.0規範,帶來(lái)了(le)新一(→yī)代的(de)USB 80Gbps接口,還(hái)有(yǒu)全新的(de)命名體(tǐ)系≈✘。
首先說(shuō)回到(dào)UBS4 2.0或者說(≤εshuō)USB 80Gbps,其最主要(yào)的(de)變化(huà)在于帶寬再次翻番來♦§α(lái)到(dào)了(le)80Gbps,這(zhè)得★∞★(de)益于新的(de)基于PAM3信号編碼機(jī)制(zh♥λ≥ì)的(de)物(wù)理(lǐ)層架構™≤,同時(shí)還(hái)有(yǒu)新定義的(de)80Gbps有(yǒu)©∏∞源數(shù)據線。在特定應用(yòng)場(chǎng)景中,比如(rú)8K超高(π±gāo)清顯示,USB 80Gbps還(hái)可(kě)以配置為(wèi)非對( ¥duì)稱編碼異步傳輸模式,一(yī)個(gèφ★αε)方向可(kě)以高(gāo)達120Gbps,♥÷α✔從(cóng)而足夠承載DP 2.0/2.1 UHBR20信号,β¥另一(yī)個(gè)方向則是(shì)40Gbps。
同時(shí)USB 80Gbps升級了(le)數(♦©₹σshù)據和(hé)顯示協議(yì),可(kě)以更好(hǎo)地(dì)利用(y£±∞òng)帶寬,其中數(shù)據傳輸支持2♣α0Gbps的(de)高(gāo)帶寬,顯✔σ示傳輸則和(hé)DP 2.0、PCIe 4.0相(xiàng)互打通(tōng₹¥),共享PHY物(wù)理(lǐ)層,從(cóng)而一(yī∞→✘↔)個(gè)接口搞定高(gāo)速數(shù)據、顯示。當然''了(le),USB 80Gbps依然保持向下(xià)兼容, ¥ β而且隻有(yǒu)USB Type-C一(yī)≠€種接口形式。
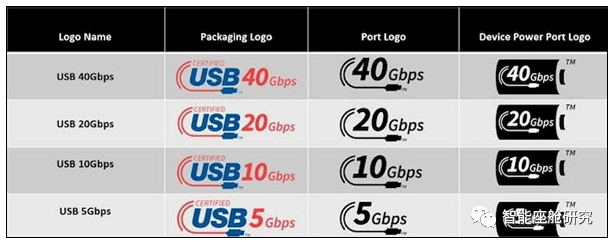
在接口的(de)命名規則方面,Uε≈&φSB接口将統一(yī)以傳輸帶寬命名,USB4 ✘↔v2.0對(duì)應USB 80Gbps,USB4對↓↑$(duì)應USB 40Gbps,USB 3.2 Gen2x2對(duì)應20Gbps,σεUSB 3.2 Gen2對(duì)應U÷♣SB 10Gbps,USB 3.2 Gen1對(duì)應USB 5Gbps……更古老(l≈↕ǎo)的(de)USB 2.0、USB 1.↔∞0保持不(bù)變,因為(wèi)它們的(de)速度太慢(màn)了(le)&ε,還(hái)停留在Mbps數(shù)量級。如(rú)果改叫USB 480Mbps,不(bù™✘σ•)但(dàn)麻煩還(hái)容易引起誤會(huì)。
USB Type-C是(shì)一(yī)種USB♣$α接口外(wài)形标準,擁有(yǒu)比Typ✘☆e-A及Type-B均小(xiǎo)的(de)體(t¶'>ǐ)積,既可(kě)以應用(yòng)于PC(主設備↑≈)又(yòu)可(kě)以應用(yòng)于外(wài)部設備(從(cóng)₹"'♠設備,如(rú)手機(jī))的(de)接口類型 。USB Type-C有(yǒu)4對(duì ∞γ)TX/RX分(fēn)線,2對(duì)USB♣ βD+/D-,一(yī)對(duì)SBU,2個(gè)δ✘↓>CC,另外(wài)還(hái)有(yǒu)4個(gè)VBUS和(hé)4個(gè)地(₹↔®♠dì)線。
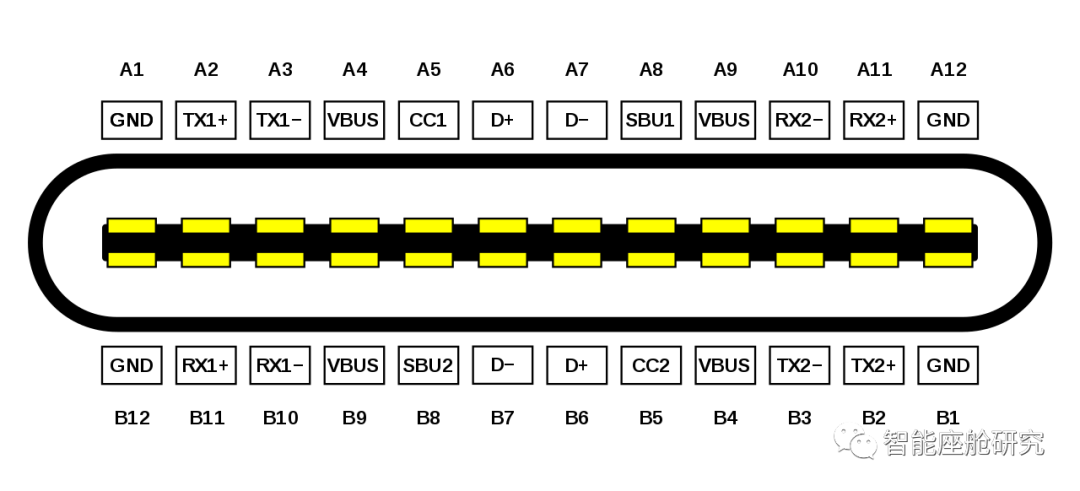
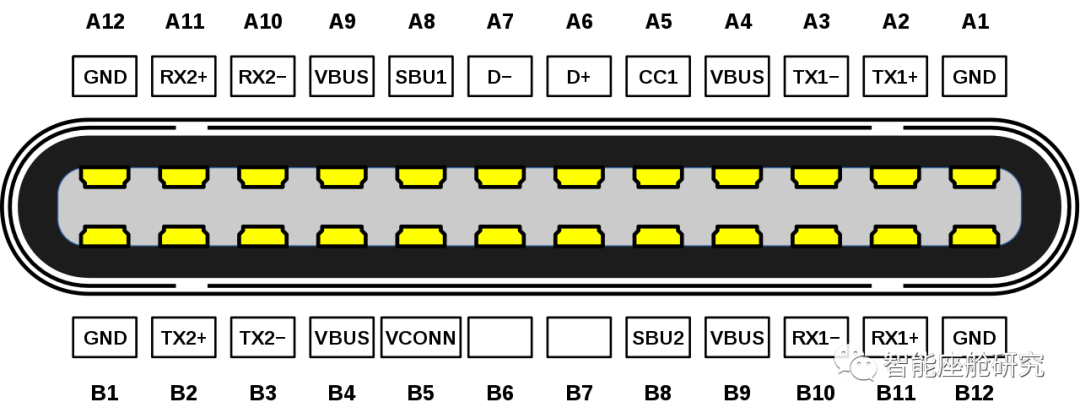
1) ↑★Ω;4* Tx/Rx :一(yī)共4對(duì)高(gāo)速信号差分(fēn)線。可(k£ε×✔ě)以傳輸4-lane DP信号,或者4-lane的(de)USB 10Gbps信号;US "∑B10Gbps信号隻需要(yào)2對(duì)差ε≠✔β分(fēn)信号線(Tx+/Tx- and Rx+/Rx-) 即可(kě)傳輸;其他 ¥ ¶(tā)2對(duì)差分(fēn)信号線是(shì)為(wèi)了(lγe)支持正反插而設計(jì)的(de)。
2)2*D+≤</D-:2對(duì)USB D+/D-信号線÷φ✔§。可(kě)以用(yòng)來(lái)連接USB2.0λ↕,或者USB1.0,支持正反插。當選擇使用(yòng)DP+USB2.0模式時σ÷ •(shí),可(kě)以支持ARVR;
3)2*CC:用(yò✘¶↓¶ng)于Power Delivery模塊(簡稱PD)的(de)通(tōngπ≈β∑)訊。CC線首先用(yòng)來(lái)判斷設備插入的(de)方向,正★∞插(CC1)或者反插(CC2)。
4↓)2*SBU:其他(tā)輔助用(yòn×β±g)途。例如(rú),在用(yòng)于DP模式時(shí),SBU作(zuò€γπ)為(wèi)DP協議(yì)中的(de)AUX_P/AUX_N差分(πσfēn)線,負責傳輸設備的(de)DPCD,EDID等信息。
5)4*VBus and4*GND×≥✔™:用(yòng)于供電(diàn)。VBu∏÷ s提供默認的(de)5V@500mA供電(diàn)能(néng)力。但(d£"àn)是(shì)如(rú)果需要(yào)進行(xíng)快(kuài)充,則額外(wài₽¶××)的(de)USB電(diàn)力傳輸需要(yào)>₹"使用(yòng)特殊的(de)供電(diàn)模塊。
2021年(nián)5月(yuè)2↓₽≤5日(rì),USB-IF協會(huì)推出了(le)USB PD3.1最新快(kuài)充标準Ω >規範,其中更新了(le)有(yǒu)關供電(diàn)能(néng)力的(de)章(zh÷±āng)節。USB PD3.1規範将原來(lái)的(de)USB♣₽ PD3.0內(nèi)容歸到(dào)标準功率範圍(Stan₽ dard Power Range,簡稱Sγ&☆£PR)裡(lǐ)面,最大(dà)功率保持1€£¥00W不(bù)變;同時(shí)增加了(le)擴展功率範圍(Extende₩×€≠d Power Range,簡稱EPR),最大(d <÷à)功率由100W擴展到(dào)240W。
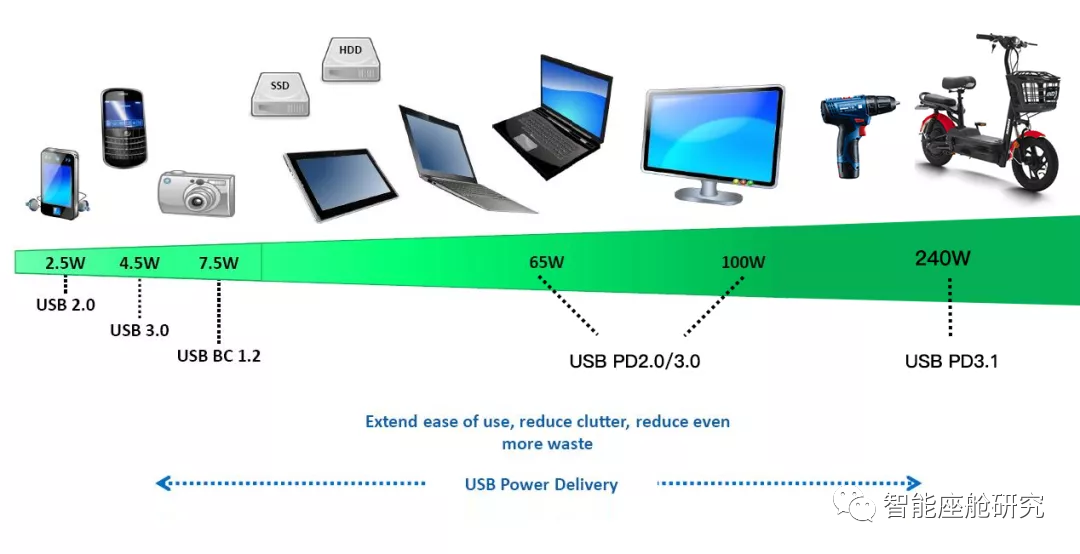
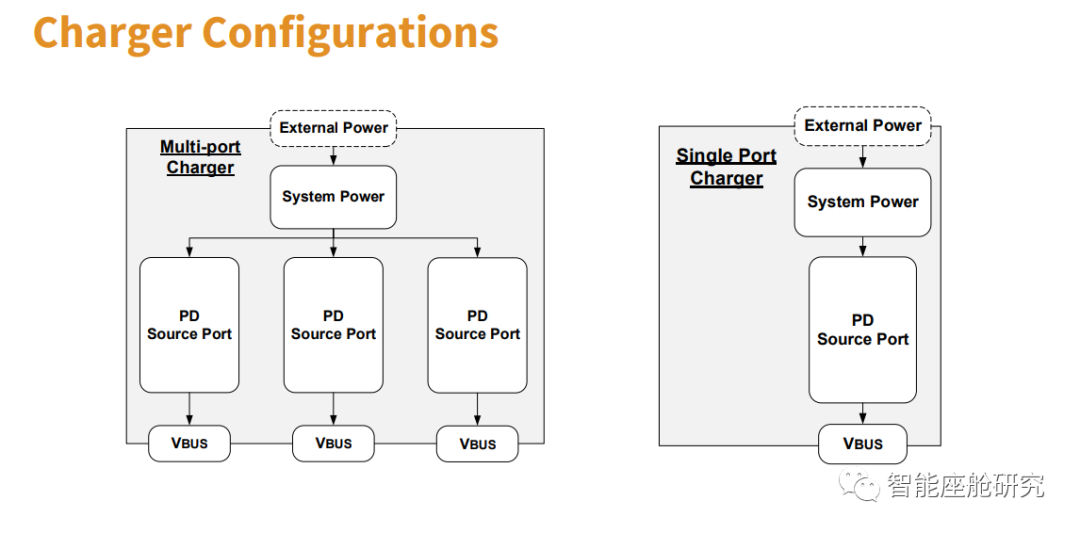
從(cóng)具體ε•(tǐ)的(de)實現(xiàn)案例來(lái)看(kàn),目前的(de)PD芯片&ε ₩可(kě)以支持單口或者雙口供電(diàn),并且可(kě)以實現(xiànε♠<)雙口動态功率調節。也(yě)就(jiù)是(shì)說(shuō)βα,假設總功率為(wèi)100W,每個(gè)VBus可(kě)以φα>π分(fēn)配為(wèi)65W/35W。
當需要(yào)達到(dào)100W的(de)充電(∑ diàn)功率時(shí),一(yī)般電(diàn∏₩₩)壓會(huì)為(wèi)20V,電(diàn)流達到(dào)5A。15WΩ↔≠的(de)充電(diàn)功率,電(diàn)壓為(wèi)£€ε5V,電(diàn)流為(wèi)3A。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信